Прочее
Уборка
После включения системы контейнер можно выпустить, нажав кнопку STOW.

Когда контейнер выпущен, он перемещается в соответствии с текущими настройками и автоматически переходит в WIDE FOV.
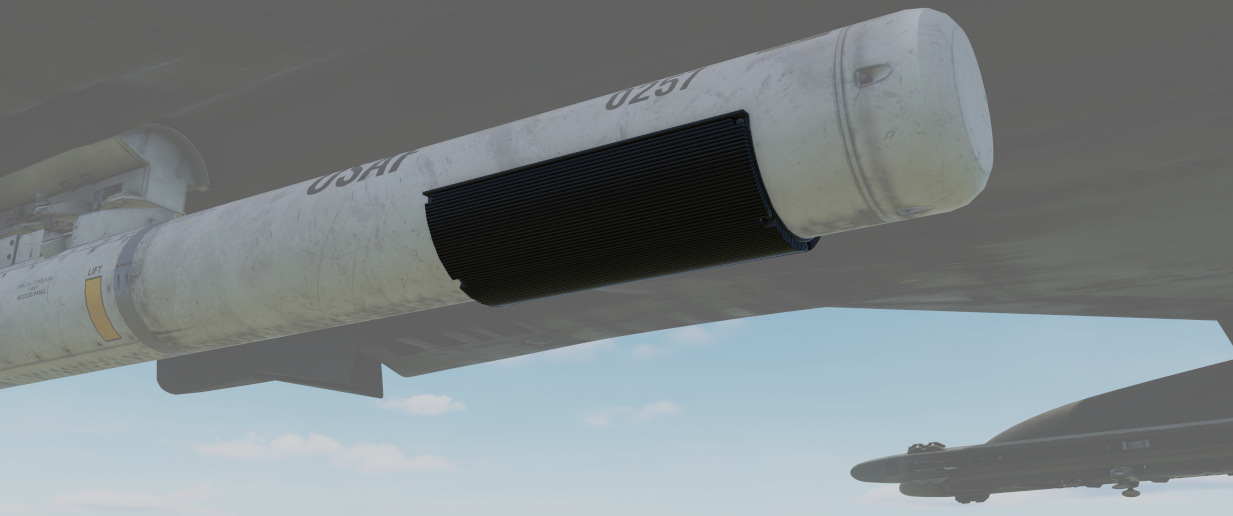
В убранном положении камера повёрнута вверх, и перед ней установлен чехол. Это защищает камеру от камней и других опасностей во время руления, взлёта или полёта на малой высоте.

Процедура уборки занимает около 5 секунд, при этом индикатор показывает текущее состояние.
🟡 ВНИМАНИЕ: Убранное положение удерживается только электрически и не может удерживаться без питания. Без питания контейнер свободно качается под действием силы. Взлёт без предварительного включения питания контейнера или полёт с выключенным контейнером приведут к тому, что контейнер покинет убранное положение. Вне убранного положения система будет повреждена из-за опасностей и всякий раз, когда она будет принудительно перемещена в пределы своего подвеса. Повреждение не только сместит положение визирования, но и повлияет на другие характеристики, такие как скорость движения и т.п.
Охлаждение
Прицельный контейнер имеет систему охлаждения, установленную в задней части, которая автоматически охлаждает контейнер внешним потоком воздуха.
В целом, система способна поддерживать температуру контейнера в пределах нормы во время всей нормальной работы.
Однако, если температура выходит из-под контроля, загорится индикатор перегрева.

В этом случае обязательно немедленно выключите контейнер и дайте ему остыть. Игнорирование индикатора приведёт к расплавлению частей контейнера, что нанесёт ему непоправимый ущерб.
Сломанный контейнер обычно обозначается включением индикатора MALF и полностью чёрным дисплеем.

Чтобы продлить срок службы контейнера и предотвратить перегрев, ограничьте медленный полёт на малой высоте, а также непрерывное использование лазера.
🟡 ВНИМАНИЕ: В качестве эмпирического правила не используйте лазер дольше 15 минут без охлаждения между использованиями. Ограничьте непрерывный медленный полёт на малой высоте при работе с контейнером до 30 минут. Для экстремальных температур наружного воздуха отрегулируйте ограничения соответствующим образом.
Визирование
Обычно Pave Spike правильно калибруется наземным экипажем перед посадкой в самолёт, но он может смещаться из-за боевых повреждений или манёвров с большой перегрузкой, и в этом случае может потребоваться повторная калибровка WSO в полёте.
Поэтому панель управления целеуказателем имеет три ручки для регулировки положения визирования по всем трём осям (азимут, угол места и крен) в пределах 2,5 градусов в любом направлении.

В идеальных условиях контейнер визируется параллельно линии отсчёта самолёта. Однако из-за отсутствия точки отсчёта для калибровки WSO может выполнить только грубое выравнивание.
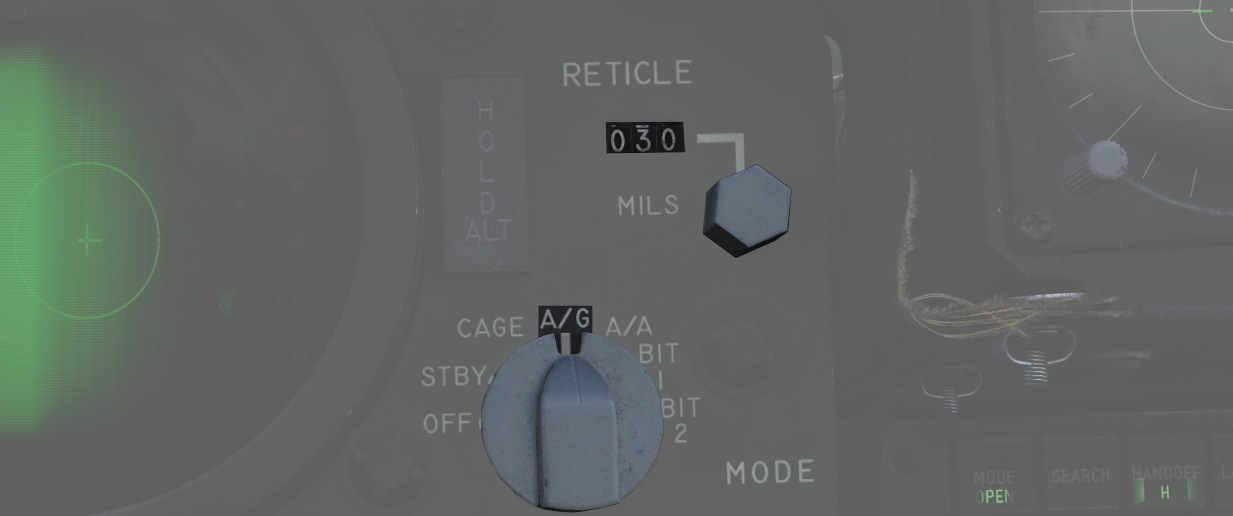
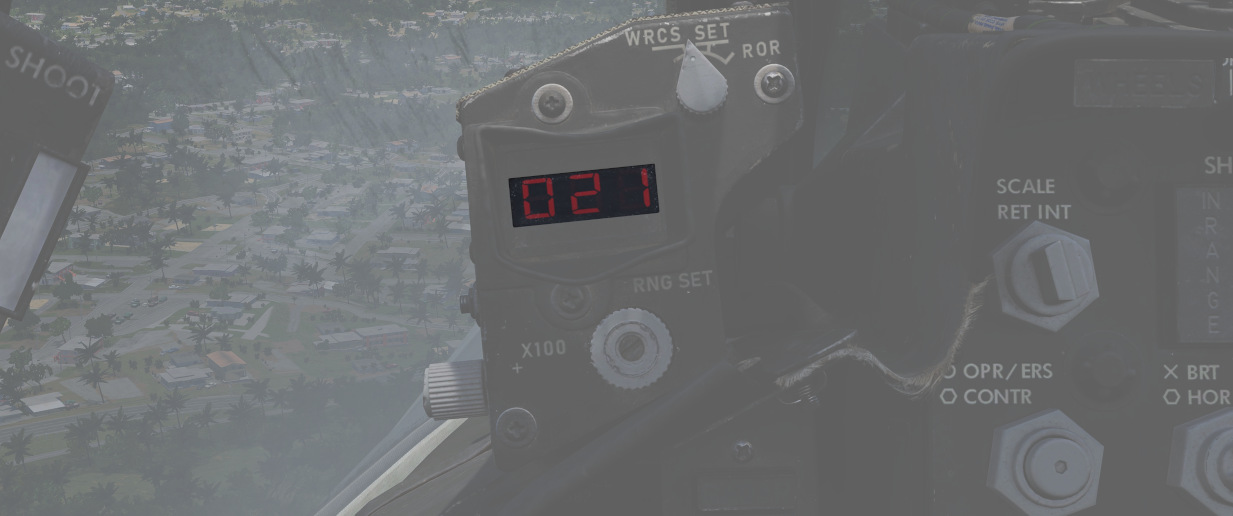
В качестве первого шага оптический прицел следует перевести в режим A/G, а сетку необходимо опустить примерно на 30 мил. При этой настройке правильное положение визирования пересекается с сеткой прицела на расстоянии примерно от 20 000 до 60 000 футов (от 200 до 600 на индикаторе дальности).
 Затем самолёт необходимо маневрировать, чтобы разместить и удерживать удалённый объект, такой как здание, на визирной марке оптического прицела.
Затем самолёт необходимо маневрировать, чтобы разместить и удерживать удалённый объект, такой как здание, на визирной марке оптического прицела.

Пока пилот удерживает объект на визирной марке, WSO должен перевести контейнер в режим захвата 12-VIS, активировать узкое поле зрения и может отрегулировать азимут и угол места, чтобы выровнять контейнер с объектом.
💡 Поскольку контейнер установлен на левой станции, правильное положение визирования смещено на несколько футов влево от визирной марки.

Крен очень сложно выровнять в полёте; по возможности сначала приземлитесь. Затем установите переключатель захвата в положение 9-VIS и используйте ручку Roll, чтобы примерно выровнять контейнер по высоте человека, стоящего на расстоянии.

В качестве альтернативы грубое выравнивание по крену можно выполнить в полёте, установив переключатель захвата в положение WRCS, интегрировав WRCS с контейнером и стерев любой текущий ввод цели. Таким образом, контейнер будет автоматически смотреть прямо вниз.
Теперь самолёт можно пролететь прямо над ориентиром, таким как река, и ручку Roll можно использовать для выравнивания линии визирования с ориентиром.

Встроенные тесты (BIT)
Контейнер имеет 5 встроенных тестов, причём BIT 1 является фактическим режимом, используемым во время нормальной работы. Их можно активировать и переключать, нажимая кнопку BIT под дисплеем. Индикаторы GO/MALF показывают результат BIT:
- GO - тест пройден успешно
- MALF - тест обнаружил ошибку
Во время нормальной работы, активируемой через BIT 1, ни один из индикаторов не горит.
BIT 0
Все индикаторы на наборе органов управления целеуказателем загораются с полной яркостью. Для этого теста не требуется включать контейнер.

GO/MALF не отображают результаты теста в этом режиме.
BIT 1
Цепи включены и контролируются. Если какое-либо показание напряжения ненормальное, загорается MALF.
GO не загорается в этом режиме.
Это стандартный режим работы. Контейнер можно использовать в обычном режиме, и система будет постоянно контролировать его состояние.
BIT 2
Система имитирует функцию отслеживания, имитируя все входные данные, данные о высоте и дальности.
Примерно через 15 секунд тест завершается, и загорается GO или MALF.
💡 Для успешного прохождения теста самолёт не должен двигаться, контейнер должен быть выпущен, а INS должен быть интегрирован.
Bit 3
Этот тест проверяет уровень энергии лазера. Контейнер перемещается в специальное положение, где он смотрит внутрь себя, так что лазер стреляет в специальный датчик, установленный внутри контейнера.
Контейнер должен быть выпущен, должен быть введён действительный код лазера, а также должна быть нажата кнопка LASER READY. Защита носовой стойки шасси игнорируется во время теста, что позволяет использовать лазер на земле.
Как только контейнер достигнет тестового положения, WSO должен нажать и удерживать кнопку Reject/Override, чтобы начать стрельбу лазером. Лазер прекращает стрельбу при отпускании кнопки.

Когда лазер стреляет, запускается 5-секундная тестовая программа, при этом датчик измеряет энергию лазера. После 5-секундного теста загорается GO или MALF, чтобы указать, был ли уровень энергии выше требуемого минимума.

Пилот может помочь WSO определить, что тестовое положение достигнуто, как показано на индикаторе азимута-угла места (1 и 2).
Bit 4
Система проверяет расчёт дальности, подавая имитируемую наклонную дальность лазера 2100 футов (±200). Пилот может подтвердить это с помощью показаний индикатора дальности.
Примерно через 8-14 секунд тест завершается, и загорается GO или MALF.
Модернизации
На основе отзывов экипажей прицельный контейнер Pave Spike получил две основные модернизации, которые доступны в DCS как отдельное выбираемое оружие.
Smart-Track
TCTO 518, известная как модернизация Smart-Track, направлена на устранение необходимости нажимать кнопку Reject/Override, чтобы принудительно использовать наклонную дальность, измеренную лазером, в ситуациях, когда рассчитанная наклонная дальность обычно была слишком неточной.
С модернизацией система будет автоматически принимать наклонную дальность лазера всякий раз, когда подвес угла места контейнера находится выше -7,5 градусов. То есть под малыми углами, например, в режиме 12-VIS или при атаках на малой высоте.
Fast-Track
Популярная модернизация TCTO 519 модернизирует двигатели подвеса контейнера, увеличивая скорость движения с 15 градусов в секунду до 60 градусов в секунду.
💡 На этой скорости прицельный контейнер способен отслеживать цель во время полёта на малой высоте с высокой скоростью, например, при пролёте на высоте 1000 футов со скоростью 500 узлов.