Руководство F-4E

Содержание
- Введение
- Описание кабины
- Описание систем
- Вооружение самолета
- ИИ Джестер
- Взаимодействие с наземным персоналом
- Стандартные процедуры
- Аварийные процедуры
- DCS (специфичные для симулятора элементы)
- Аббревиатуры
- Заключение
Введение
Дорогой читатель,
Мы с гордостью представляем вам F-4E Phantom II от Heatblur Simulations для Digital Combat Simulator. Мы потратили годы на разработку и бесчисленные часы на исследования, чтобы создать максимально подробную симуляцию этого легендарного самолета. Вы сможете летать на Фантоме как в качестве пилота, так и оператора систем вооружения (WSO), в одиночку с JESTER-AI - вашим собственным искусственным интеллектом WSO, или в многопользовательском режиме вместе с другом.

Мы не только воссоздали лётную модель, системы, авионику, радар, систему предупреждения об облучении (RWR) и системы применения оружия Фантома, но и постарались внедрить инновационный подход к симуляции полёта в целом, заложив важную основу для наших будущих модулей и, как всегда, пытаясь немного расширить границы симуляции полёта. От небольших, но жизненных мелочей, таких как возможность писать на остеклении фонаря кабины, до интерактивного наземного техника, наш Фантом также использует нашу систему симуляции на основе компонентов нового поколения - самолёт моделируется как соединение тысяч отдельных компонентов. От стрелки прибора до рулевых поверхностей, каждый компонент влияет на состояние самолёта и даже имеет свой собственный износ. От моделирования точного потребления энергии от источника питания до самой маленькой лампочки и всех узлов на этом пути, от гидравлической жидкости, которая приводит в движение гидравлику, которая, в свою очередь, приводит в движение рулевые поверхности, до модели, основанной на физике масс - теперь всё происходит естественным образом, под влиянием друг друга, а не по сценарию. Означает ли это, что нестабильное потребление энергии может привести к мерцанию лампы, или что вы можете выпустить шасси в случае отказа с помощью гравитации, или что грамотная или, наоборот, небрежная эксплуатация самолёта влияет на износ каждого отдельного компонента? Да! Мы никогда раньше не пытались создать симуляцию настолько глубокую, как с F-4E Phantom II. DCS: F-4 представляет собой одну из самых захватывающих симуляций реактивного истребителя времен холодной войны!

Такие инновации и глубокая симуляция потребуют от пользователей более длительного обучения. Вот почему для нас было важно также внедрить инновации в области инструментов обучения, доступных вам, начиная с этого руководства, чтобы наши модули были доступны как для начинающих, так и для опытных любителей симуляторов. Вы можете открыть руководство в полёте и читать его, но ещё лучше, вы можете щелкнуть любой переключатель (с помощью комбинации клавиш) в полёте, и руководство откроется в нужной главе, объясняя переключатель или систему в кабине, пока вы мчитесь по воздуху в своём громоздком реактивном самолёте. Мы также изменили базовую структуру руководства, перейдя на модель с открытым исходным кодом. Это позволит сообществу легко вносить свой вклад через GitHub, поскольку две головы (или тысячи) думают лучше, чем одна. Дополнительным преимуществом станет значительное улучшение читаемости мобильной версии. Мы добавили гиперссылки на многие элементы, обеспечивая лёгкую навигацию между схемами кабины и обзорами систем. В руководстве также представлены многочисленные чек-листы и процедуры, а также раздел «Уроки», который планируется включить в ранний доступ к Фантому. Полностью написанные уроки дополнят лётные тренировочные миссии. Тренировочные миссии теперь адаптированы для изучения совместно с письменным уроком в руководстве, вы сможете отматывать назад шаги в тренировочной миссии, читать вместе с ней и ставить её на паузу (больше не нужно перезапускать из-за пропущенных элементов). Со всеми этими функциями в вашем распоряжении вы сможете должным образом подготовиться к тренировкам. И самое главное, во время обучения вас будут инструктировать настоящие пилоты F-4 и настоящий инструктор WSO F-4! Кто ещё может научить вас лучше?
Мы надеемся, что вам понравится как изучать, так и летать на F-4E Phantom II - погружайтесь так глубоко, как пожелает ваше сердце. В этом захватывающем путешествии мы желаем вам удачи и множество весёлых приключений и, конечно же, не позволяйте сесть вам на хвост, крутите головой на 360!
От имени всей команды Heatblur,
Nicholas Dackard, Heatblur Simulations, генеральный директор и основатель Heatblur Simulations

Определения
Если аббревиатура, такая как DSCG, неясна в какой-либо момент, найдите её в исчерпывающем перечне, приведённом в главе Аббревиатуры.
В данном руководстве используются следующие обозначения.
Общие
| Символ | Значение | Описание |
|---|---|---|
| 💡 | Примечание | Пункт, которому уделяется особое внимание |
| 🟡 | Внимание | Следует соблюдать, чтобы предотвратить повреждение оборудования |
| 🔴 | Предупреждение | Игнорирование может привести к травмам или гибели людей |
| 🚧 | В разработке | Раздел находится в стадии разработки и будет ещё улучшен |
Чек-лист
| Символ | Описание |
|---|---|
| Жирный шрифт | Этот шаг или процедура, выделенная жирным шрифтом обязателена к выполнению (члены экипажа должны уметь выполнять процедуры, выделенные жирным шрифтом, не заглядывая в контрольный список) |
| 🔧 | Пункт включает или может включать взаимодействие c наземным техником |
| ⚡ | Шаг нельзя выполнить при запуске от аккумулятора, необходимо внешнее питание |
Историческая справка
1953-1958: Фаза разработки (от F3H до AH-1 и F4H)
 Макет F-4 с ракетами AIM-7
Макет F-4 с ракетами AIM-7
Разработка F-4 Phantom II началась после поражения McDonnell в конкурсе истребителей ВМС США 1953 года, победителем которого стал Vought F8U. Не желая мириться с неудачей, представители McDonnell опросили Бюро аэронавтики ВМС, ряд оперативных командований, офис начальника военно-морских операций и всех пилотов и техников, готовых обсуждать состояние современной военно-морской авиации.
После почти года анализа и проектных работ, включая полноразмерный макет, сформировался дизайн того, что они классифицировали как универсальный истребитель. Потенциал универсального истребителя, а не специализированной направленности, предпочитаемой ВМС в то время, был основан на успехе F3H-1 Demon.
F3H-1 Demon
Demon был разработан как противовес F4D Skyray в роли перехватчика. Поскольку Skyray доказал своё сверхзвуковое превосходство в ходе цикла разработки, McDonnell расширил возможности F3H Demon, включив в него респектабельное вооружение "воздух-земля", чтобы оправдать своё место в ограниченном составе авианосца по сравнению с F10F Jaguar и F7U Cutlass, которые также разрабатывались в то время.
В конечном итоге, оснащённый AIM-9 Sidewinder и AIM-7 Sparrow - последний давал F3H возможность ведения боя за пределами визуальной дальности, которой Skyray никогда не мог похвастаться, и способностью нести и доставлять 6000 фунтов боеприпасов "воздух-земля", Demon превзошёл своих конкурентов по боевому потенциалу, даже если на бумаге он занимал второе место по чистым характеристикам.
Начиная с намерения развить Demon в качестве базового планера, был проведён ряд инженерных оценок, включающих как одно-, так и двухдвигательные конфигурации с различными крыльями. Два наиболее многообещающих набора данных - двухдвигательные конструкции типа F3H-G и F3H-H с двигателями General Electric J65 и J79 соответственно, заменили исходное крыло Demon на стреловидное крыло с углом стреловидности 45 градусов.
Особое внимание уделялось обеспечению многоцелевого назначения нового самолёта, охватывающего широкий спектр потенциальных операций: дневные или всепогодные атаки, фоторазведка, дневной или всепогодный перехват с радаром, совместимым со Sparrow, радиоэлектронная борьба и двухместная конфигурация для координации ударов. Эксперименты с этим широким спектром конструкторских замыслов зашли настолько далеко, что включали новую взаимозаменяемую носовую часть и кабину, позволяющую переконфигурировать планер в течение нескольких часов для заданного набора задач с необходимыми системами, подходящими для экипажа.
Хотя ВМС проявили небольшой интерес к возможности замены носовой части, итоговые цифры исследований F3H-G и -H привлекли их внимание. На бумаге они были способны развивать скорость 1,52 Маха и невероятные 1,97 Маха на высоте 35 000 футов соответственно.
К октябрю 1954 года Бюро аэронавтики ВМС (BuAer) оценило аналогичные незапрошенные предложения от Grumman, Douglas и North American и предоставило McDonnell контракт на 38 миллионов долларов на два лётных образца преемника Demon, получившего внутреннее обозначение AH-1.
 Макет McDonnell F3H-G; фото ВМС США
Макет McDonnell F3H-G; фото ВМС США
AH-1
Два месяца спустя ВМС подбросили McDonnell неожиданность, приказав снять с самолёта оборудование "воздух-земля" и сосредоточиться на роли всепогодного перехватчика в одноместной конфигурации, причём окончательное решение об изменении роли было официально объявлено в апреле 1955 года.
Переход был в некоторых кругах сочтён катастрофическим - со временем он привёл к удалению запланированной внутренней пушки и снятию всех точек подвески, за исключением утопленных фюзеляжных отсеков для Sparrow и центральной точки подвески топливного бака. На этом этапе было принято окончательное решение об использовании J79 в качестве силовой установки в связи с желанием ВМС получить перехватчик со скоростью 2 Маха. Кроме того, ВМС также приняли решение о двухместном экипаже - как и собственные исследования McDonnell, успех в более быстрой и дальнобойной среде перехвата показал полезность второго человека для работы с радаром.
Однако это ещё не было решено. BuAero всё это время вело переговоры с Vought, и в середине 1955 года назначило сравнительные испытания между двумя конкурирующими фирмами на новую роль перехватчика; на этот раз соперником AH-1 от McDonnell стал потомок уже состоящего на вооружении Crusader: F8U-3.
F4H (F-4A)
Переименованный в F4H (или также F-4A) за два с половиной года, предшествовавших сравнительным испытаниям в конце 1958 года, Phantom II от McDonnell существенно опередил Crusader III от Vought во время предварительной оценки ВМС. В то время как конструкция McDonnell вышла на этап лётных испытаний месяцем ранее (и номинально вошла в стадию проектирования почти на год раньше, чем конструкция Vought), преимущества Vought, перенесшего большую часть аэродинамического профиля предыдущего Crusader, проявились на ранней стадии сравнения. Crusader III первым достиг скорости 2 Маха в лётных испытаниях, показал способность развивать более высокие максимальные скорости во время предварительной оценки ВМС и был отмечен за более совершенную управляемость планера в большинстве режимов.
 F-4H на борту USS Independence в 1960 году; фото ВМС США
F-4H на борту USS Independence в 1960 году; фото ВМС США
Но по мере продолжения оценки выяснилось, что Phantom II от McDonnell противостоял Crusader III там, где это имело значение: в боевых возможностях. ВМС хотели перехватчик со скоростью 2 Маха, а не разросшийся дневной истребитель.
Интеграция Sparrow в F8U-3 была признана недостаточной по сравнению с Phantom, поскольку из-за проблем с аэродинамическими характеристиками от AIM-7 на F4H пришлось отказаться. Ещё большую озабоченность в роли перехватчика - как ранее выяснили в McDonnell, вызывала чрезмерная нагрузка на пилота при управлении радиолокационной установкой AN/APG-74 в Crusader III во время боя, которая была признана слишком высокой для поддержания эффективности, в то время как оператор в задней кабине Phantom II мог надёжно получать информацию о ситуации на радаре и поддерживать захват цели для атаки во время манёвров.
F4H от McDonnell, обладая более высокими лётными качествами, мог сражаться так, как это было нужно ВМС. Кроме того, поскольку фирма продолжала развивать свой потенциал "воздух-земля" по просьбе ВМС, даже несмотря на то, что они неоднократно меняли цели программы, - Phantom II, как и Demon до него, оправдывал своё существование в составе авианосца во всех боях, а не только в роли дальнего перехватчика. И вот 17 декабря 1958 года комиссия по предварительной оценке ВМС объявила о своих выводах и победителе сравнительных испытаний: Phantom II от McDonnell.
1958-1963: Военно-морской перехватчик с многоцелевой родословной (от F4H до F-110 и F-4)
ВВС США не остались равнодушными к разработке Phantom II, поскольку ВМС, попросив пересмотреть возможность применения "воздух-земля", дали McDonnell точку входа. В то время как ВВС рассматривали представителей McDonnell в дискуссии о новом штурмовике, служба на самом деле была заинтересована в F4H, вооружённом Sparrow, в качестве замены F-106.
Командование противовоздушной обороны в 1961 году запросило оценку, известную как Project High Speed, которая ещё раз доказала превосходство Phantom II над конкурентом в роли перехватчика. В свете полученных результатов ВМС предложили представителям Тактического авиационного командования ВВС демонстрацию бомбометания, особо отметив успешные испытания "воздух-земля" с многозарядными бомбодержателями Фантома - возможностью, которой ВВС не хватало. На этой серии демонстраций присутствовали политики ВВС, члены Конгресса и даже генерал Кертис Лемей, - во время которых F4H-1 из VX-5 точно сбросил двадцать две 500-фунтовые бомбы, - была подготовлена почва для тактического авиационного переворота ВМС/McDonnell.
 F-4E Phantom II из 347-го тактического истребительного крыла сбрасывает шесть 500-фунтовых бомб Mark 82
F-4E Phantom II из 347-го тактического истребительного крыла сбрасывает шесть 500-фунтовых бомб Mark 82
Вступление в должность администрации Кеннеди в январе 1961 года не повредило делу; Кеннеди привлёк бывшего президента Ford Motor Company Роберта Макнамару на пост министра обороны. Стремясь к оптимизации - иногда до абсурда, - характеристики F4H от McDonnell были расценены как выдающиеся, на которых можно было бы извлечь выгоду в свете новой конвенциональной доктрины администрации «Гибкого реагирования»; ядерное сдерживание больше не было бы основной гарантией обещания США НАТО.
Хотя Макнамара хотел, чтобы A-7 ВМС и F-111 ВВС выполняли тактические бомбардировочные задачи для обоих родов войск, до ввода этих двух самолётов в эксплуатацию оставалось не менее пяти лет; Фантом существовал, обеспечивал выдающиеся характеристики сразу же и мог быстро обеспечить желаемое 50-процентное увеличение структуры обычных сил, которого Белый дом ожидал от ВВС. Давление со всех сторон - Белого дома, Конгресса, McDonnell и зарубежных интересов - в конечном итоге сломило сопротивление ВВС самолёту, «не сделанному здесь», и к январю 1962 года в бюджете ВВС появились Фантомы, заказанные Тактическим авиационным командованием; Командование противовоздушной обороны, которое начало расследование Фантома в ВВС, осталось с F-106.
F-110 Spectre
Обозначенный на время как F-110, чтобы соответствовать серии Century ВВС в качестве проявления гордости за службу, Фантом ВВС от McDonnell был запущен в производство. Первоначальная партия F4H в конфигурации ВМС была предоставлена для обучения и оценки в конце того же года, а первый полёт настоящего F-4C состоялся 27 мая 1963 года - универсальная система обозначений для служб преобразовала F4H-1 в F-4B в сентябре 1962 года.
F-4B и F-4C
Переконфигурация Phantom II для ВВС была быстрой, с упором на изменения, соответствующие требованиям службы. К ним относятся изменение системы шасси для работы на аэродромах с более высокой скоростью, добавление двойного управления полётом, внедрение противоскользящей системы и преобразование для совместимости с дозаправкой топливом в воздухе с помощью штанги.
Дальнейшие изменения включали добавление инерциальной навигационной системы LN-12, переход на радар APQ-100 с функциями "воздух-земля" и систему запуска от патрона для полевого использования без тележки со сжатым воздухом в сочетании с внутренней батареей.
Эта конфигурация F-4C станет первым Фантомом, использованным во время участия ВВС США во Вьетнаме, начиная с декабря 1964 года.
1965-1974: Поспешное отступление - Вьетнам (F-4D и F-4E)
 F-4B сбрасывает бомбы над Вьетнамом; фото ВМС США
F-4B сбрасывает бомбы над Вьетнамом; фото ВМС США
Первоначальное развёртывание Фантома в Юго-Восточной Азии принесло ряд первых успехов - первое официально подтверждённое уничтожение МиГ-17 ракетой AIM-9 Sidewinder (10 июля 1965 года) и первый воздушный бой США с МиГ-21 (26 апреля 1966 года). К сожалению, Фантом также стал жертвой первой потери США от ЗРК во Вьетнаме (24 июля 1965 года) и первой потери США в воздушном бою от МиГ-21 (5 октября 1966 года).
Когда первоначальные проблемы с самолётом были устранены - включая изменения в топливных баках крыла и внутренней проводке, - Фантом оказался способным и надёжным планером для ВВС. Даже отсутствие пушки было в какой-то степени решено путём интеграции внешних пушечных контейнеров SUU-16 и SUU-23.
F-4D
Обновление первого Фантома ВВС, находившегося в производстве, - F-4D, - включало множество улучшений качества жизни: радар APQ-109 с режимами "воздух-земля", внутреннюю навигационную систему ASN-63, вычислитель сброса ASQ-92 и систему опознавания «свой-чужой» APX-80 "Combat Tree". Дальнейшие дополнения включали автоматическую перекачку топлива и новый прицел ASG-22. Боевая живучесть была усилена за счёт совместимости с APS-107 RHAW и контейнером ECM, а также новых катапультных кресел. Тем не менее, желание службы придать самолёту свой собственный «сделанный здесь» оттенок продолжалось, что неудачно завершилось интеграцией AIM-4 Falcon в модель F-4D.
AIM-9 vs AIM-4
Используемая на F-102 Delta Dagger и F-106 Delta Dart и считавшаяся некоторыми разумным конкурентом AIM-9 Sidewinder, ракета AIM-4 Falcon, по мнению руководства ВВС, могла быть установлена вместо ракеты ближнего боя ВМС без потери возможностей; это быстро оказалось ошибочным предположением.
Хотя AIM-9B имела ограниченные манёвренные ограничения для запуска и захвата цели, как и другие инфракрасные ракеты ближнего боя своего поколения, она была значительно более надёжной в использовании; система охлаждения Falcon могла поддерживать необходимую температуру головки самонаведения только в течение короткого времени после активации, и её нельзя было снова включить после истечения времени работы охладителя, в то время как неохлаждаемая 9B могла оставаться доступной неограниченное время.
Sidewinder захватывала цель гораздо быстрее - во многих случаях менее чем за две секунды, по сравнению с шестью-семью секундами, необходимыми для Falcon.
Хуже того, AIM-4 была ракетой прямого попадания - её взрыватель, срабатывающий при контакте с оперением, требовал прямого попадания в цель для детонации боевой части ракеты, в то время как AIM-9 несла неконтактный взрыватель; любой Sidewinder, приблизившийся к своей цели, представлял угрозу уничтожения.
 F-4D из 435-й TFS над Вьетнамом
F-4D из 435-й TFS над Вьетнамом
С началом поставок F-4D в 8-е TFW в мае 1967 года характеристики новой конфигурации быстро встретили насмешки. Зона применения была слишком мала по сравнению с Sidewinder, время подготовки к пуску слишком большим, а само оружие слишком ненадёжным, чтобы применять его в динамичной манёвренной среде воздушного боя, как это было во Вьетнаме.
Неудача Falcon не только подтвердила качество Sidewinder в сравнении - и подчеркнула необходимость модернизации ракеты, как это делали ВМС, - но и усилила беспокойство экипажей по поводу отсутствия внутренней пушки. К этому времени установки SUU одержали несколько побед над северовьетнамскими МиГами (в конечном итоге закончив войну с 9 подтверждёнными уничтожениями), и было решено исправить то, что многие считали первородным грехом Фантома, путём дальнейшей доработки F-4.
F-4E
К этому времени McDonnell разрабатывал план обновления программы для F-4E, и предполагалось, что самолёт будет нести пушку M61A1 внутри, а вместе с ней - радар Hughes CORDS (Coherent On Receive Doppler System). Hughes не смог успешно поставить свою систему CORDS, и в январе 1968 года в качестве её замены был выбран радар Westinghouse APQ-120. APQ-120 был полностью твердотельной версией APQ-109/117, переработанной в соответствии с требованиями установки внутренней пушки. Радар получил изменения в креплении, дополнительное демпфирование и уменьшение высоты антенны, чтобы поместиться в меньшей полости непосредственно над стволом пушки.
В F-4E были внесены дальнейшие изменения для повышения его боевой эффективности. Оборудование, удалённое для совместимости с Sidewinder в F-4D, было обновлено и возвращено. Была установлена оптическая система прицеливания ASG-26A Lead Computing Optical Sighting System, а также обновлены сигналы предупреждения экипажа о нахождении в зоне поражения и разрешении стрельбы, что дало пилотам более чёткое представление о зонах применения Sparrow и Sidewinder. Обновления Echo Phantom на этом не закончились; совместимость с многозарядными бомбодержателями и соответствующие обновления вычислителя сброса оружия обеспечили дополнительные возможности бомбометания, AGM-65 Maverick стал доступен как в ИК, так и в электрооптическом вариантах, передняя кромка крыльев была оснащена предкрылками для повышения манёвренного потенциала, а также был установлен интерфейс Digital Scan Converter Group для APQ-120.
К сожалению, первые поставки F-4E с октября 1967 года совпали с началом свёртывания бомбардировочной кампании США Rolling Thunder над Северным Вьетнамом. Самолёту пришлось ждать до 1972 года, чтобы испытать в деле все преимущества своих обновлений. С возобновлением воздушной кампании в феврале того же года E-модель Phantom II совершила тысячи боевых вылетов и за семнадцать месяцев одержала 21 воздушную победу.
Программа обучения Rivet Haste
Также следует отметить Rivet Haste - позднюю вьетнамскую учебную инициативу 1972 года, на которую сильно повлияли два обновления в середине срока службы - модификация «556» и TISEO.
До «556» для изменения режима оружия пилоту приходилось убирать руки с РУД и смотреть вниз на панель сброса, переключая ряд переключателей, чтобы отключить одни пилоны и включить другие; в случае удачной атаки северовьетнамцев или необходимости переключения между видами оружия на лету - отводить взгляд от угрозы было долго и опасно.
С модификацией к внешней рукоятке РУД была добавлена пара переключателей. Первый, «мизинцевый» переключатель, позволял управлять пушкой, Sidewinder и Sparrow в одном из трёх положений, а второй, на передней поверхности рукоятки, мгновенно переключал режимы оружия между «воздух-воздух» и «воздух-земля»; теперь пилот имел быстрый доступ к своему оружию «воздух-воздух» и мог переключаться между ним на лету, ни разу не глядя вниз в кабину. Эта модификация положила начало концепции, называемой HOTAS - управление на РУД и РУС.
556 также включала модификации панели вооружения для боеприпасов "воздух-земля", добавляя возможность залпового сброса, одновременно уменьшая количество элементов управления, необходимых для доступа к полному программированию ARBCS.
Модернизация TISEO
Дальнейшим усилением инициативы экипажа стала установка TISEO - Target Identification System Electro-Optical, в 1974 году.
 F-4E Phantom II с TISEO, установленным на левом крыле над учебными бомбами синего цвета
F-4E Phantom II с TISEO, установленным на левом крыле над учебными бомбами синего цвета
Состоящая из камеры 4x/10x, установленной в левом крыле, TISEO обеспечивала визуальную идентификацию удалённых целей, захваченных радаром, что позволяло использовать AIM-7 Sparrow в полной мере в сочетании с системой опознавания «свой-чужой» APX-80. Теперь экипажи могли независимо подтверждать два фактора идентификации до сближения, вступая в бой с большим преимуществом - даже если им не разрешали стрелять за пределами визуальной дальности.
В сочетании с обучением Rivet Haste, в ходе которого опытные экипажи прошли программу обучения в качестве инструкторов по системам и тактике (аналогично обучению NFWS, которое проводилось для экипажей ВМС США в то же время), курсанты отстаивали программу модификации Фантома и настаивали на том, чтобы Double Attack (параллельная разработка Loose Deuce, которая использовалась ВМС США во Вьетнаме с момента возобновления бомбардировочной кампании) стала стандартом для методологии «воздух-воздух» во всех ВВС.
Хотя это обучение, в конечном счёте, было слишком поздним, чтобы оказать реальное влияние, поскольку окончательное прекращение бомбардировок США произошло всего через несколько недель после того, как первые экипажи, прошедшие обучение Haste, вернулись во Вьетнам, они задали тон экипажам Фантомов ВВС в будущем.
1975-1991: Воин холодной войны
По мере того, как Вьетнамская война подходила к концу, F-4E перешёл от активных боевых действий к роли воина холодной войны. Хотя F-15 и F-16 были на горизонте, чтобы занять ведущие позиции в тактических ролях "воздух-воздух" и "воздух-земля", огромное количество Фантомов в ВВС США и у их союзников означало, что F-4E останется на острие копья ещё два десятилетия.
Поддержание эффективности F-4 в качестве ударной платформы и истребителя было жизненно важным, и возможности E продолжали расширяться в 1980-х годах. Была обеспечена совместимость со всеракурсными AIM-9L и M Sidewinder, а также с улучшенным AIM-7F, а затем и с AIM-7M Sparrow. Телевизионная управляемая GBU-15 с необходимой системой передачи данных была интегрирована в Фантом, начиная с 1975 года. Для доставки дополнительных управляемых боеприпасов F-4E получил не один, а два варианта прицельных контейнеров - Pave Spike и Pave Tack.
Особого внимания заслуживает установка цифровой модульной авионики, или DMAS (Digital Modular Avionics System). DMAS представляла собой полную замену навигационного компьютера Фантома, инерциального навигационного комплекта и WRCS, который использовал радиосигналы LORAN (Long Range Navigation) для точного определения местоположения самолёта в любой точке мира. Включение DMAS обеспечило существенное улучшение навигационных возможностей F-4E и точности сброса оружия, а также расширение возможностей Фантома по режимам доставки.
F-4E завершил свою службу на передовой в ВВС США сразу после операции «Буря в пустыне», а последние оставшиеся пользователи этого типа были выведены из состава действующей армии. Подразделения Национальной гвардии ВВС США сохраняли этот тип до середины 90-х годов, причём различные подразделения заменяли их другими типами по мере необходимости для выполнения своих задач и в зависимости от местоположения.
F-4E Phantom II сегодня
Из всех моделей Фантома F-4E был самой многочисленной версией, которая была построена в количестве 1370 единиц.
F-4E Phantom II всё ещё находится на вооружении некоторых операторов НАТО, включая ВВС Греции, ВВС Южной Кореи и ВВС Турции.
Ожидается, что они будут летать как минимум до 2030 года.
Обзор вариантов
Помимо F-4E, было построено несколько вариантов Фантома для различных целей.
| Вариант | Описание | Базовый вариант | Первый полёт |
|---|---|---|---|
| A | Прототип и предсерийная модель | 1958 | |
| B | Первая серийная модель для ВМС США | A | 1961 |
| C | Несколько улучшений для более эффективного использования ВВС США | B | 1963 |
| D | Модернизация и улучшенные возможности "воздух-земля" | C | 1965 |
| E | Дальнейшие улучшения, лучший радар и носовая пушка | D | 1965 |
| F | Упрощённый экспортный вариант, используемый Германией | E | 1973 |
| G | Модернизация Wild Weasel для обнаружения и борьбы с ЗРК | E | 1976 |
| J | Вариант ВМС США для эксплуатации с авианосцев | B | 1966 |
| K | Вариант Королевского флота с другим двигателем | J | 1966 |
| M | Вариант Королевских ВВС с другим двигателем | J | 1966 |
| N | Модернизированные системы и структурные улучшения | B | 1970 |
| S | Модернизированные системы и бездымные двигатели | J | 1977 |
| RF | Несколько вариантов Фантома, модифицированных для разведки | B, C, E | |
| QF-4 | Модифицированы в дистанционно управляемые беспилотные мишени для исследований | многие |
Служба за рубежом: Наследие Фантома
Наследие F-4 не ограничивалось границами США. Его характеристики вызвали интерес у многих союзников США той эпохи, и Phantom II остаётся на ограниченной службе на момент написания этой статьи. Поскольку F-4E был самым многочисленным из этого типа, было естественно, что именно эта модель получит наибольшее распространение.
На фоне постоянно меняющегося ландшафта военных технологий зарубежные операторы F-4E предприняли комплексные усилия по модернизации и усовершенствованию. Эти инициативы были направлены на продление срока службы самолёта и повышение его боевых возможностей. F-4E с его мощными двигателями эволюционировал, чтобы соответствовать требованиям современной войны, укрепив своё место в качестве почтенной платформы в арсеналах своих приёмных стран.
Служба F-4E Phantom II за рубежом была не просто главой в истории военной авиации, а сагой, которая разворачивалась на континентах и в коридорах геополитической власти. Его приспособляемость, долговечность и боевое мастерство запечатлели Фантом в коллективной памяти стран, которые его эксплуатировали, оставив неизгладимое наследие в небе, которым он когда-то правил.
 Изображение: RF-4E Phantom II ВВС Греции приземляется на RIAT 2008, Великобритания
Изображение: RF-4E Phantom II ВВС Греции приземляется на RIAT 2008, Великобритания
Израиль
Первая страна, получившая F-4E на экспорт, Израиль, обозначила его как Kurnass (Кувалда).
Фантом начал участвовать в боевых действиях с ВВС Израиля в течение нескольких месяцев после поставки, одержав несколько побед в войне на истощение против Египта и в стычках с Сирией. Война Судного дня 1973 года стала свидетельством впечатляющих успехов Фантома, сбившего 85 арабских самолётов в обмен на 5 потерянных в воздушных боях. Но именно характеристики Фантома как средства "воздух-земля" привлекли наибольшее внимание ВВС Израиля, в результате чего F-4E специализировался на этой роли, поскольку F-15 и F-16 стали доступны стране для экспортных закупок.
Kurnass, в конечном счёте, получил ряд важных обновлений, начиная с 1987 года, чтобы сохранить тип жизнеспособным. Были установлены радар APG-76, новый бортовой компьютер и индикатор на лобовом стекле (HUD), а также возможность применения ракеты "воздух-поверхность" Popeye. ВВС Израиля в конечном итоге получили от 212 до 222 F-4E.
Австралия
Австралия стала вторым импортёром F-4E, но только на ограниченный срок. Двадцать четыре F-4E были предоставлены Королевским ВВС Австралии (RAAF) в аренду Соединёнными Штатами в качестве временной меры из-за задержек с поставками F-111C.
F-4E эксплуатировался в Австралии всего три года, с сентября 1970 по 1973 год. Австралийские лётчики были впечатлены характеристиками Фантома, и, хотя США предложили RAAF выкупить арендованные самолёты, это предложение было в конечном итоге отклонено.
Япония
 F-4EJ Kai ВВС Японии взлетают в 2002 году; фото ВМС США
F-4EJ Kai ВВС Японии взлетают в 2002 году; фото ВМС США
С разрешения Госдепартамента США и на условиях лицензионного соглашения с McDonnell Douglas компания Mitsubishi Heavy Industries наладила местное производство F-4E под обозначением F-4EJ. F-4EJ получил совместимость с японским оружием, но без заправочной штанги и бомбового компьютера AJB-7 из-за договорных ограничений на ВВС Японии.
F-4EJ был модернизирован до версии «Kai» в 1984 году, получив радар APG-66J и противокорабельные ракеты ASM-1 и -2. F-4EJ прослужил Японии более 40 лет, последние экземпляры были сняты с вооружения в марте 2021 года.
Иран
Впервые получив F-4E в 1971 году, Иранские имперские ВВС (IIAF) получили 177 F-4E в ходе различных поставок до конца 1970-х годов. После Исламской революции F-4E, теперь уже ВВС Исламской Республики Иран (IRIAF), широко применялись - и с большим успехом - против войск Саддама Хусейна.
Первый налёт на ядерный объект в Осираке в сентябре 1980 года был совершён четырьмя F-4E, которые повредили реактор и системы управления; этот налёт предшествовал более известной атаке ВВС Израиля на тот же объект, которая окончательно его уничтожила. Аналогичным образом, в апреле 1981 года F-4E были основными ударными самолётами во время налёта на все три аэродрома комплекса H-3 на западе Ирака.
Конфликт с Ираком обошёлся в значительные потери как самолётов, так и экипажей, причём западные эмбарго на поставки оружия серьёзно ограничили возможности IRIAF по эффективному обслуживанию Phantom II. К концу войны даже по местным оценкам количество боеготовых F-4 составляло менее четырёх десятков. Хотя местная промышленность пыталась возродить Фантом после окончания конфликта, по текущим оценкам, общая численность их парка F-4 составляет около 60 самолётов, включая оставшиеся F-4D, F-4E и RF-4E.
Греция
Первые поставки F-4E для ВВС Греции (HAF) начались в 1974 году, а ежегодные поставки были прекращены из-за политических причин в 1981 году. Общая численность парка Phantom II HAF достигла 121 закупленного самолёта (F-4E и RF-4E), а пополнение запасов бывшими самолётами ВВС США довело это число до окончательного значения после свёртывания программы после операции «Буря в пустыне».
Модернизация греческих Фантомов компанией DASA была обширной и строилась по модели, аналогичной F-4F ICE Люфтваффе. В частности, HAF F-4E получил APG-65 для AMRAAM (включая замену цифровой шины), HUD и совместимость с контейнером LITENING.
Фантомы HAF также получили специальные обновления в зависимости от предполагаемых ролей эскадрилий, с заменой инерциальной навигации и включением GPS для тех, кто специализируется на роли "воздух-поверхность". В настоящее время Греция сохраняет на вооружении более 30 Фантомов.
Турция
Турция эксплуатирует Фантомы уже давно, закупив более 160 F-4E (а также более 60 RF-4E), начиная с 1974 года. Поставки Фантомов осуществлялись как новыми, так и бывшими ВВС США, а в середине 90-х годов израильская компания Israel Aerospace Industries (IAI) была привлечена к их модернизации.
Основанный на предлагаемой программе модернизации для ВВС Израиля, F-4E Terminator 2020 избавился от более 1600 фунтов лишнего веса за счёт замены проводки и гидравлической системы, получил радар Elta M-2032, полную реализацию HOTAS, многофункциональные дисплеи (MFD), настоящий HUD и обширные обновления систем вооружения, интеграцию Popeye и GBU, а также прицельный контейнер LITENING II. ВВС Турции намерены сохранить оставшиеся 30 или около того самолётов на вооружении до середины 2030-х годов.
Германия
 F-4F ВВС Германии в 1998 году; фото ВВС США
F-4F ВВС Германии в 1998 году; фото ВВС США
Будучи в основном заказчиком F-4F и RF-4E - крупнейшим получателем экспортных F-4 с 263 поставленными за рубеж самолётами, - Германия закупила 10 F-4E для базирования в Соединённых Штатах для переподготовки своих лётчиков, которые проходили обучение вместе с подразделениями ВВС США.
Южная Корея
 Техник самолета корейских ВВС помогает пилоту 497-й тактической истребительной эскадрильи сесть в кабину своего F-4E во время учений TEAM SPIRIT 1986
Техник самолета корейских ВВС помогает пилоту 497-й тактической истребительной эскадрильи сесть в кабину своего F-4E во время учений TEAM SPIRIT 1986
Южная Корея, давний получатель F-4, начиная с 1977 года заменила свой парк F-4D новыми F-4E, в конечном итоге закупив 103 самолёта.
Южная Корея получила последний построенный в США F-4 Phantom, 78-0744, в октябре 1979 года. На момент написания этой статьи F-4E остаётся на вооружении ВВС Республики Корея (RoKAF), планируется снять его с вооружения в 2024 году.
Египет
Последний экспортный заказчик F-4E, Египет, получил право на покупку в рамках мирного договора с Израилем и соглашения «Мир фараона»; вместо новых самолётов Египет получил 35 бывших самолётов ВВС США.
Фантом, в конечном счёте, стал предшественником закупки страной F-16 и вначале столкнулся с трудностями в обслуживании своими ремонтными бригадами. Советники McDonnell Douglas помогли египетским эскадрильям вернуть показатели боеготовности к норме, и Phantom II продолжал служить в ВВС Египта (EAF) до конца 90-х годов.
Воздушные победы F-4E
F-4E Phantom II, модернизированная версия серии F-4 Phantom, сыграл значительную роль в воздушных боях во время Вьетнамской войны. Оснащённый ракетой AIM-7 Sparrow, управляемым по радару оружием с возможностью ведения боя за пределами визуальной дальности, F-4E имел заметное преимущество в боях.
Во Вьетнаме пилоты F-4E участвовали в воздушных боях с различными вражескими самолётами. Ракета Sparrow позволяла им поражать противников с расстояния, что способствовало успеху самолёта. Ключевые пилоты ВВС США, такие как Стив Ричи и Чак ДеБельвю, достигли статуса аса, одержав пять или более воздушных побед.
Общее количество воздушных побед, приписываемых F-4E Phantom II, с учётом ВВС США и ВМС США, оценивается примерно в 21 во время Вьетнамской войны, включая 4 МиГ-19 и 17 МиГ-21. Однако эта цифра может варьироваться в зависимости от источника. В общей сложности варианты F-4C/D/E сбили 107 реактивных самолётов МиГ, за что получили прозвище «Крупнейший поставщик запчастей для МиГов».
Несмотря на свою эффективность, F-4E столкнулся с трудностями в ближнем бою из-за первоначального отсутствия внутренней пушки. Модификации, включая добавление пушки M61 Vulcan, устранили этот недостаток и улучшили характеристики самолёта в ближнем бою.
Успех F-4E Phantom II во Вьетнаме укрепил его репутацию универсального и грозного истребителя, и он продолжал служить в военно-воздушных силах по всему миру в течение многих лет.
 F-4 Phantom II морской пехоты из истребительно-штурмовой эскадрильи 314 запускает ракету AIM-7
F-4 Phantom II морской пехоты из истребительно-штурмовой эскадрильи 314 запускает ракету AIM-7
ВВС США
В частности, ВВС США подтвердили 21 уничтожение.
| Уничтожения | Самолёт |
|---|---|
| 17 | МиГ-21 |
| 4 | МиГ-19 |
Сбиты следующим оружием:
| Уничтожения | Оружие |
|---|---|
| 10 | AIM-7 |
| 5 | AIM-9 |
| 5 | Пушка |
| 1 | Манёвр |
ВВС Израиля
В боях ВВС Израиля сбили 116 самолётов.
| Уничтожения | Самолёт |
|---|---|
| 81 | МиГ-21 |
| 14 | МиГ-17 |
| 14 | Ми-8 |
| 5 | СУ-7 |
| 1 | AS-5 |
| 1 | ИЛ-28 |
Сбиты следующим оружием:
| Уничтожения | Оружие |
|---|---|
| 44 | AIM-9 |
| 33 | Пушка |
| 32 | Манёвр или неуточнённое |
| 7 | AIM-7 |
ВВС Исламской Республики Иран
ВВС Исламской Республики Иран сбили 83 самолёта.
| Уничтожения | Самолёт |
|---|---|
| 29 | МиГ-21 |
| 21 | МиГ-23 |
| 19 | СУ-20/22 |
| 2 | АН-24 |
| 2 | МИ-25 |
| 2 | Mirage F1 |
| 1 | Hunter |
| 1 | ТУ-22 |
| 1 | Mirage 5 |
| 1 | Bell 412 |
| 1 | SA 321 |
| 1 | Неопознанный |
Сбиты следующим оружием:
| Уничтожения | Оружие |
|---|---|
| 46 | AIM-9 |
| 22 | Манёвр или неуточнённое |
| 9 | Пушка |
| 6 | AIM-7 |
Начало эксплуатации F-4E по странам
F-4 широко использовался несколькими странами НАТО и их союзниками. Благодаря этому он достиг многих этапов первого полёта в различных странах.
| Страна | Номер McDonnell | Бортовой номер/серийный номер ВВС США | Дата |
|---|---|---|---|
| США | 2234 | 66-284 | 30 Июня 1967 |
| Израиль | 3492 | 68-396 | 26 Мая 1969 |
| Австралия | 3847 | 69-0304 | 26 Июня 1970 |
| Япония | 4037 | 69-7463 | 14 Января 1971 |
| Иран | 4093 | 69-7711 | 2 Марта 1971 |
| Греция | 4439 | 72-01500 | 29 Января 1974 |
| Турция | 4525 | 73-01016 | 17 Июня 1974 |
| Германия | 4946 | 75-00628 | 5 Мая 1977 |
| Южная Корея | 4966 | 76-0493 | 28 Июля 1977 |
 Экипаж F-4 Phantom II выполняет послеполетный осмотр
Экипаж F-4 Phantom II выполняет послеполетный осмотр
Технические характеристики: F-4E
| Характеристика | Описание |
|---|---|
| Размах крыла | 38 футов 5 дюймов (11,7 м) |
| Размах крыла (сложенные) | 27 футов 7 дюймов (8,4 м) |
| Длина | 63 фута (19,2 м) |
| Высота | 16 футов 5 дюймов (5 м) |
| Площадь крыла | 530 кв. футов (49,2 м²) |
| Нагрузка на крыло | 78 фунтов/кв. фут (380 кг/м²) |
| Масса пустого | 30 328 фунтов (13 757 кг) |
| Максимальная взлётная масса | 61 795 фунтов (28 030 кг) |
| Тяга (без форсажа) | 23 810 фунтов силы (105,92 кН) |
| Тяга (форсаж) | 35 690 фунтов силы (158,76 кН) |
| Практический потолок | ~56 000 футов (~17 070 м) |
| Максимальная скорость | 2,23 Маха; 1280 узлов (2370 км/ч) |
| Дальность (перегоночная) | 1457 морских миль (2699 км) |
 Планеры F-4J ВМС США проходят модификацию и модернизацию до стандарта F-4J(UK) на NARF (Naval Air Rework Facility) в NORIS (North Island), Сан-Диего, Калифорния
Планеры F-4J ВМС США проходят модификацию и модернизацию до стандарта F-4J(UK) на NARF (Naval Air Rework Facility) в NORIS (North Island), Сан-Диего, Калифорния
Обзор кабины

Добро пожаловать на борт! Приготовьтесь к подробному знакомству с кабиной F-4E Phantom II от Heatblur.
Следующая глава даёт подробный обзор кабины пилота, а также кабины оператора систем вооружения (WSO). Каждый отдельный переключатель будет описан и кратко объяснён, а также будет дан контекст его функций.
Более подробная информация о различных системах и работе органов управления и контроля, помимо их краткого описания, доступна в главе 3. Описание систем самолета.
«Просто взгляните поближе. У нас есть всё для полетов на этой птичке»
Обзор кабины пилота
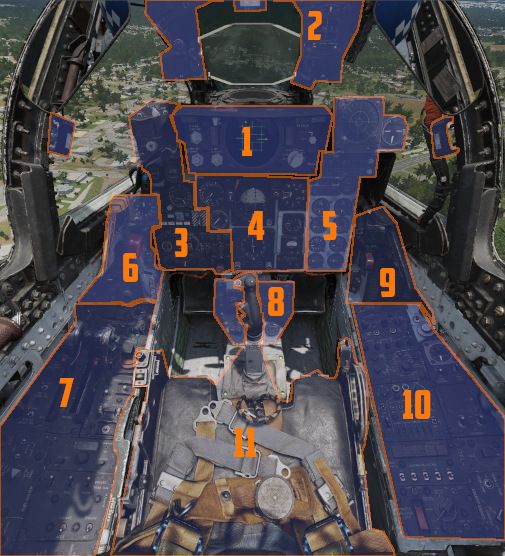
Кабину пилота можно условно разделить на основные части: приборная доска, содержащая основную часть приборов, управление оружием и экран радара; левая консоль с пультами управления двигателями, топливной системой, системой управления и др.; центральная вспомогательная панель (пьедестал); правая консоль с панелями связи, радионавигации и светотехнического оборудования.
Компоновка
Панель электронно-оптической группы (DSCG)

Панель DSCG в основном относится к индикации данных радара, а также видеосигнала от оружия с электронно-оптическим наведением и прицельных контейнеров. В процессе развития DSCG заменила собой простой экран прямого отображения данных РЛС на электронно-лучевой трубке, который не имел цифрового интерфейса.
💡 Селектор источника видеосигнала находится на пьедестале.
RET INT / SCALE - Рукоятка подсветки прицела / угловых шкал радара
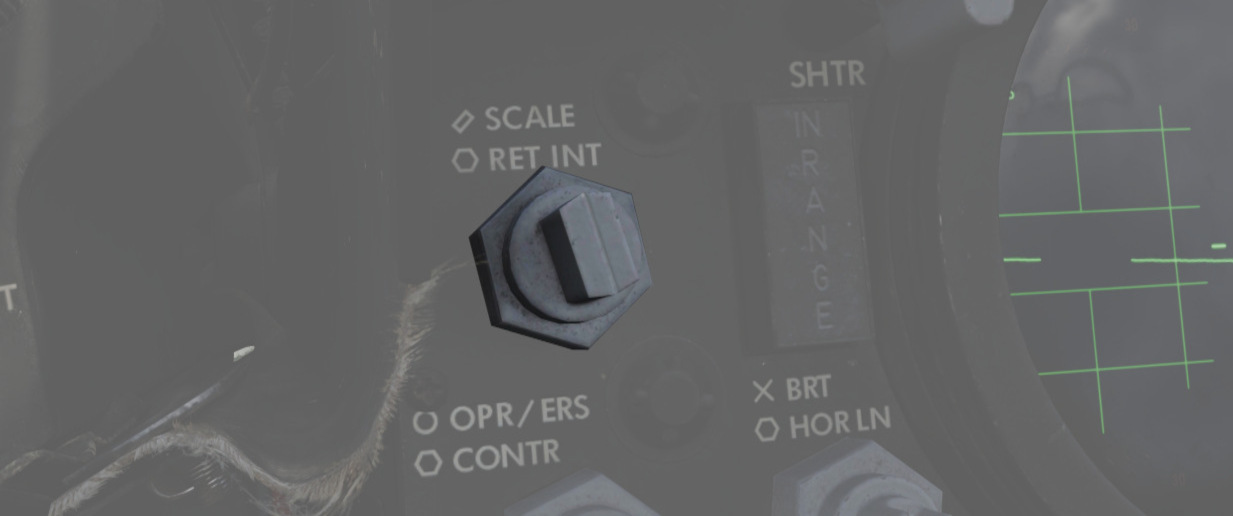
Комбинированная соосная рукоятка (
| Название | Описание |
|---|---|
| RET INT | Регулирует яркость (интенсивность) подсветки прицельной марки. |
| SCALE | Регулирует яркость подсветки шкал углового возвышения антенны РЛС и горизонтальной развертки сканирования, расположенных по краям индикатора РЛС. |
SHTR OPEN/CL - Рукоятка затвора прицела

Рукоятка (
RETICLE – Рукоятка понижения прицельной марки

Вращающаяся рукоятка (
MODE – Переключатель режимов работы прицела

Галетный переключатель (
| Название | Описание |
|---|---|
| OFF | Выключение системы. |
| STBY | Прогрев системы. Прицельная марка не отображается. |
| CAGE | Прицельная марка отображается зафиксированной по линии визирования радара (RBL). Применимо, в том числе, для взлёта и посадки. |
| A/G | Выбор режима "воздух-земля". Понижение прицельной марки отсчитывается от продольной оси фюзеляжа (FRL), либо от горизонта при некоторых режимах бомбометания. |
| A/A | Выбор режима стрельбы с упреждением "воздух-воздух". Положение прицельной марки вычисляется по сигналам гироскопа, дальности и CADC (центрального вычислителя системы воздушных сигналов), но может быть и зафиксировано. |
| BIT 1 | Режим самотестирования системы 1. |
| BIT 2 | Режим самотестирования системы 2. |
Рукоятка контрастности CONTR с кнопкой OPR/ERS

Вращающаяся рукоятка с кнопкой внутри для настроек экрана электронно-оптического индикатора (
| Название | Описание |
|---|---|
| OPR/ERS | Кнопка активации и стирания изображения на самолётах с DVST (памятью изображений). Не работает с имеющимся индикатором DSCG. |
| CONTR | Регулировка контрастности отображаемого видео/фона на индикаторе. |
BRT/HORN LN – рукоятка яркости и линии горизонта

Двойная ручка (
| Название | Описание |
|---|---|
| BRT | Регулирует относительную яркость экрана электронно-оптического индикатора. |
| HOR LN | Регулирует относительное положение линии горизонта, отображаемой на экране РЛС индикаторов в обеих кабинах. |
Боковой слайдер INT

Боковой слайдер INT (
Боковой слайдер RED
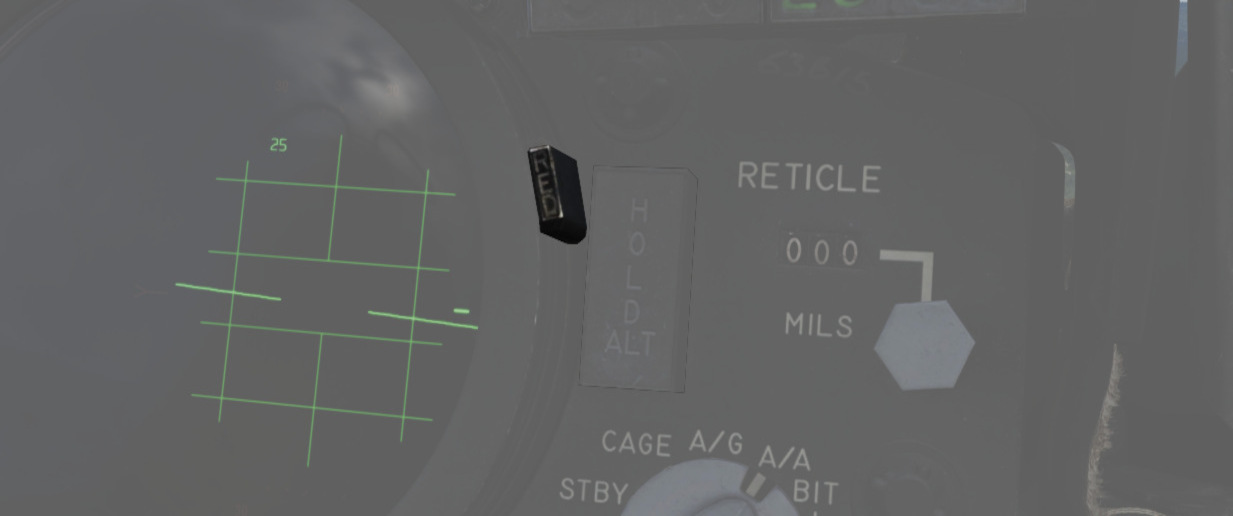
Боковой слайдер RED (
IN RANGE – табло разрешенной дальности пуска

Светосигнальное табло IN RANGE (
HOLD ALT – табло «держи высоту»

Светосигнальное табло HOLD ALT (
- Дальность больше разрешенной дальности пуска,
- Высота полета более 32 000 футов, и
- Захваченная цель находится более чем на 8000 футов выше истребителя.
Когда табло HOLD ALT горит, истребитель следует направить так, чтобы центрировать точку наведения относительно круга допустимых ошибок наведения ASE только по азимуту. Когда индикатор HOLD ALT гаснет, истребитель должен резко увеличить тангаж, чтобы полностью центрировать точку наведения в круге ASE. Подробнее см. 3.10 Система радара.
WHEELS – светосигнальное табло «шасси выпусти»

Светосигнальное табло «шасси выпусти» (
Табло-повторитель дальности

Значения дальности (
Индикаторы козырька кабины

Индикаторы над головой предоставляют информацию непосредственно в поле зрения пилота и помогают в ситуациях, когда пилот сосредоточен и смотрит наружу, например, во время боя, посадки или дозаправки топливом в воздухе.
Индикаторы SHOOT
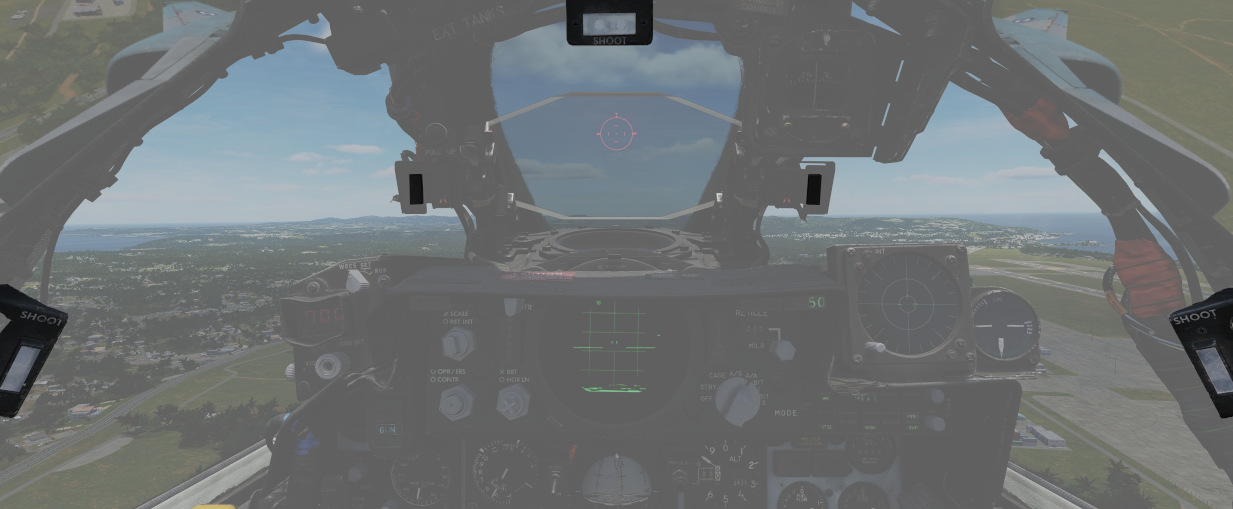
Группа из 5 индикаторов, расположенных вокруг дуги фонаря, загорается при выполнении параметров запуска ракеты. Эти индикаторы не загораются в режимах визуального перехвата (VI) или "воздух-земля".
Индикаторы дозаправки топливом в воздухе

Отображают состояние системы дозаправки топливом в воздухе во время её использования.
| Название | Описание |
|---|---|
| READY | Загорается, когда приёмник дозаправки топливом в воздухе полностью выдвинут. Гаснет, когда штанга зафиксирована или приёмник убран. |
| DISENGAGED | Загорается, когда штанга отсоединяется во время цикла, и остаётся гореть, пока система дозаправки не будет сброшена. |
| L.H. FULL | Указывает, что левый внешний бак полон (также во время заправки на земле). |
| CTR. FULL | Указывает, что центральный внешний бак полон (также во время заправки на земле). |
| R.H. FULL | Указывает, что правый внешний бак полон (также во время заправки на земле). |
Индикатор набора высоты LABS

Загорается и гаснет во время бомбометания Loft и LABS, чтобы предоставить пилоту информацию о времени выполнения последовательности.
Резервный магнитный компас

Стандартный магнитный компас для резервного навигационного сопровождения в случае отказа основных систем директорного управления. Компас следует использовать только в горизонтальном полёте. Карты девиации компаса находятся над правым бортом фонаря в каждой кабине.
Индикаторы угла атаки
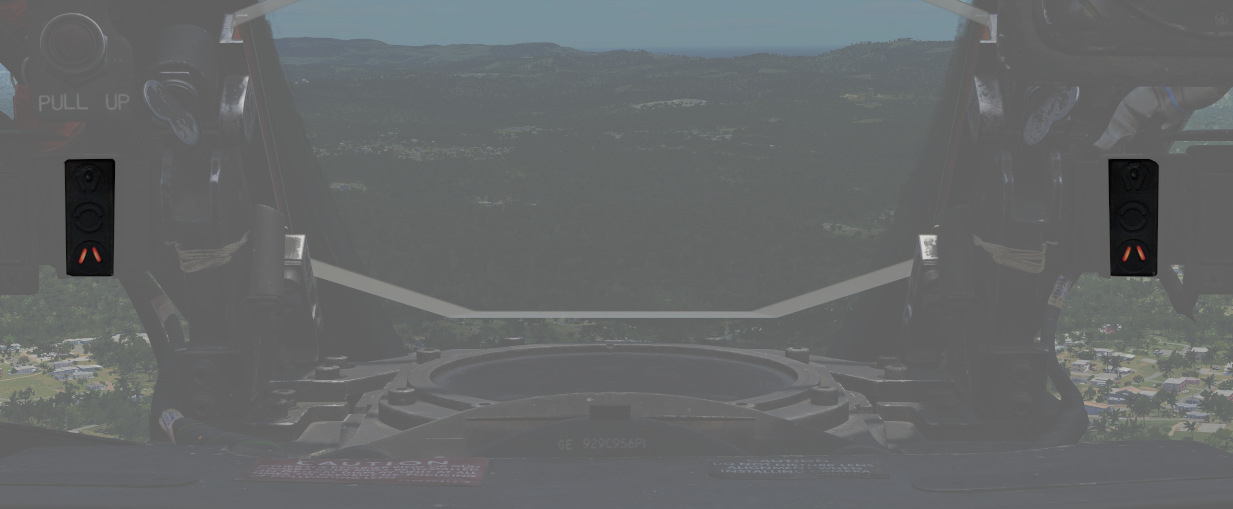
Пара индикаторов слева и справа от HUD, которые обеспечивают быстрое подтверждение текущего состояния угла атаки самолёта на основе подсвеченного положения и цвета.
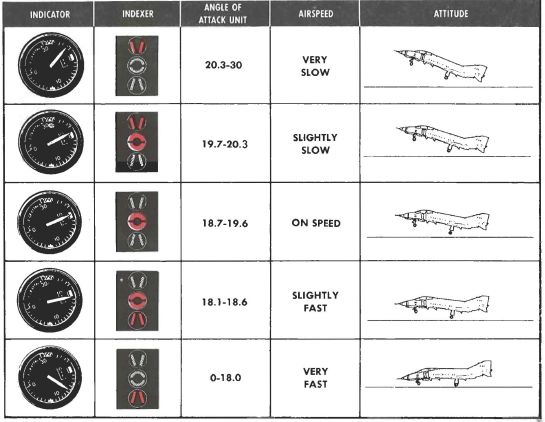
Также может указывать на сигналы управления оружием, а звуковая система дублирует индикацию звуковыми сигналами. Подробнее см. раздел 3.1.2 Органы управления полётом, Система угла атаки.
💡 Индикаторы угла атаки горят только при убранном правом шасси.
Управление оружием

Эта группа в левой части основной панели предоставляет все настройки, связанные с оружием, такие как включение ракет или выбор режима бомбометания. Она включает в себя индикатор истинной воздушной скорости (
Индикатор дальности

Эта панель предоставляет пилоту показания наклонной дальности, измеренной прицельным контейнером Pave Spike (x100 футов).
При нажатии кнопки тестирования (
Ручка режима (
- WRCS - Автоматическая доставка
- ROR - Сброс по дальности
В положении SET на дисплее отображается желаемая дальность сброса, используемая в режиме ROR. Ручку под показаниями (
Индикаторы на лобовом стекле (HUD)

Панель индикаторов на лобовом стекле (HUD) отображает состояние оружия для главного переключателя включения, а также текущее выбранное оружие "воздух-воздух" на основе положения мизинцевого переключателя на левой рукоятке РУД.
| Название | Описание |
|---|---|
| RADAR | Загорается, когда выбрана ракета "воздух-воздух" с радиолокационным наведением. |
| HEAT | Загорается, когда выбрана ракета "воздух-воздух" с инфракрасным наведением. |
| GUN | Загорается, когда выбрана носовая пушка. |
| ARM | Загорается, когда главный переключатель включения установлен в положение ARM. |
Индикатор канала дистанционного управления УВЧ (UHF)

Отображает текущее выбранное значение канала, когда радиостанция настроена на PRESET. В противном случае индикатор отображает M, если радиостанция настроена на Manual, G, когда функция COMM установлена как GUARD/ADF, или A, когда переключатель A-3-2-T находится в положении A.
Индикатор истинной воздушной скорости

Отображает истинную воздушную скорость самолёта в узлах и откалиброван от 150 до 1500 узлов; таким образом, воздушные скорости ниже этого диапазона ненадёжны.
Ручка яркости пилотажных приборов

Регулирует подсветку основных пилотажных приборов обеих кабин.
Вращение по часовой стрелке увеличивает их яркость, но в то же время также уменьшает яркость большинства сигнальных ламп и индикаторов в самолёте.
💡 При уменьшении яркости индикаторы SHOOT полностью выключаются.
Яркость пилотажных приборов можно дополнительно регулировать индивидуально с помощью ручек на панели регулировки панели регулировки яркости пилотажных приборов, расположенной на правой стенке.
Подробнее см. 3.9. Внутреннее освещение
🚧 В настоящее время освещение пилотажных приборов связано с ручкой панели приборов на правой консоли. Правильные элементы управления будут доступны позже во время раннего доступа.
Переключатель включения носа/хвоста

Управляет соленоидами включения бомбодержателей MER и TER, выбирая, с каких позиций MER/TER отсоединяются тросики включения от взрывателей бомб при отделении, тем самым делая их боеготовыми. Эта функция также управляет выборочной возможностью низкого/высокого сопротивления для бомб с торможением.
| Название | Описание |
|---|---|
| SAFE | Соленоиды включения не активируются; бомбы сбрасываются с отключённым взрывателем. |
| NOSE | Активируются соленоиды переднего и центрального положения для удержания тросиков включения. |
| TAIL | Активируются соленоиды заднего положения для удержания тросиков включения. |
| NOSE/TAIL | Активируются все соленоиды переднего, центрального и заднего положения для удержания тросиков включения. |
Например, варианты MK-82 Air или Snakeye взорвутся, только если выбран носовой взрыватель, и переключатся между конфигурацией с высоким сопротивлением при установленном хвостовом взрывателе и низким сопротивлением, если он не установлен.
Кнопки выбора станции

Кнопки выбора станции используются для активации станций вооружения "воздух-земля" и носовой пушки. При выборе станции верхняя половина, обозначающая позицию, загорится зелёным цветом, подтверждая, что станция активна. Нижняя половина загорится жёлтым цветом, как только будет выбран необходимый режим, оружие будет совместимо с выбранным вариантом на ручке выбора оружия, главный переключатель включения будет находиться в положении ARM и будет завершён любой необходимый период прогрева для выбранного типа оружия. Позиции L и R - это левая и правая соответственно, O обозначает внешние, а I - внутренние станции. Центральная позиция оружия - CL, а носовая пушка включается кнопкой выбора станции GUN.

Ручка регулировки яркости
Также предусмотрена ручка регулировки яркости для увеличения или уменьшения яркости подсветки кнопок выбора станции в зависимости от текущих условий в кабине.
Если ручка яркости пилотажных приборов над ней установлена в крайнее положение против часовой стрелки, она переопределяет ручку регулировки яркости, и кнопки выбора станции всегда подсвечиваются на полную яркость.
💡 Ручка регулировки яркости может регулировать яркость только в ограниченном диапазоне.
Переключатель Master Arm

Обеспечивает функцию главного включения для всего оружия самолёта.
Ручка режима доставки

Ручка режима доставки устанавливает систему управления огнём в желаемый тип сброса оружия "воздух-земля". Разделённый на две половины, левый сектор циферблата относится к режимам доставки ARBCS (Altitude Reference and Bombing Computer Set), а правый сектор обеспечивает автоматические функции сброса с использованием WRCS (Weapon Release Computer Set) с возможным подключением к навигационному компьютеру, в зависимости от режима. В положении 11 часов находится положение OFF, которое используется для оружия "воздух-воздух" (включая пушку). Следующий режим, DIRECT, используется для оружия с видеоуправлением, такого как AGM-65, а также в качестве режима бомбометания с прямым визированием. Полный список позиций следующий, по часовой стрелке слева:
| Название | Описание |
|---|---|
| INST O/S | Мгновенный сброс через плечо |
| LOFT | Лофтирование |
| O/S | (Замедленный) сброс через плечо |
| T LAD | Замедленный LADD (сброс с малым углом на парашюте) |
| TL | Замедленный горизонтальный сброс |
| OFF | Выкл. ("воздух-воздух") |
| DIRECT | Ручной прямой сброс |
| TGT FIND | Поиск цели (только режим навигации и Pave Spike) |
| DT | Пикирующий сброс |
| DL | Пикирующий сброс с выравниванием |
| L | Сброс с выравниванием |
| OFF SET | Сброс бомб со смещением |
| AGM-45 | AGM-45 Shrike |
Дополнительную информацию см. в главе 4.3 Оружие "воздух-земля".
Ручка выбора оружия

Используется для выбора соответствующего типа оружия, подавая сигналы сброса на AWRU (Aircraft Weapons Release Unit). Положения ARM и TV блокируют стрельбу из оружия "воздух-воздух", если не активен сигнал CAGE. Положения ARM и TV не влияют на состояние настройки оружия с радиолокационным наведением. Положения следующие:
| Название | Описание |
|---|---|
| AGM-12 | AGM-12 Bullpup |
| BOMBS | Бомбы (все типы, включая кассетные). |
| RKTS & DISP | Ракеты и контейнеры. |
| ARM | Противорадиолокационная ракета (AGM-45 Shrike). |
| TV | Электрооптическое оружие (AGM-65 Maverick). |
| C | Не используется; может использоваться как положение OFF. |
| B | Как и переключатель AIR TO AIR в задней кабине, отменяет требование CAGE. |
| A | Резервный режим, который одновременно сбрасывает кассетные бомбы, ракеты или контейнеры; бомбы не сбрасываются. |
Блок сброса оружия (AWRU)

Обеспечивает планирование сброса одиночных или нескольких бомб или ракет и сбрасываемых боеприпасов с заданным интервалом на основе выбора, сделанного между ручкой интервала, ручкой количества (QTY) и переключателем INTRVL.
Дополнительную информацию см. в разделе 3.11.2 Блок сброса оружия (AWRU).
Ручка интервала
Ручка интервала (
Переключатель интервала
Переключатель INTRVL (
Ручка количества
Ручка количества (
Выбор «1» переводит AWRU в режим одиночного ручного бомбометания; одно нажатие кнопки сброса бомбы сбрасывает одну бомбу.
Выбор значения от «2» до «18» устанавливает AWRU в режим одиночного залпа; в этом режиме AWRU будет сбрасывать бомбы в соответствии с запрограммированным интервалом до тех пор, пока не будет сброшено заданное количество бомб или не будет отпущена кнопка сброса бомбы. После отпускания кнопки счётчик сбрасывается, и последующее нажатие и удержание сбросит запрограммированное количество бомб.
Выбор «C» устанавливает AWRU в режим одиночного непрерывного сброса; нажатие кнопки сброса бомбы сбрасывает бомбы в соответствии с запрограммированным интервалом до тех пор, пока не будет отпущена кнопка сброса бомбы или не будут израсходованы все боеприпасы с выбранных пилонов.
Настройка «P» предназначена для режима ручного сброса парами. При выборе как минимум двух станций каждое нажатие кнопки сброса бомбы сбрасывает две бомбы; как и в режиме одиночного ручного сброса, этот режим не включает функцию интервала.
Наконец, настройка «S» для залпа сбрасывает бомбы одновременно со всех выбранных станций в соответствии с выбранным интервалом до тех пор, пока не будет отпущена кнопка сброса бомбы. Таким образом, если выбраны четыре станции с интервалом 2 секунды (0,2 на шкале интервала, настройка переключателя INTRVL x10), четыре бомбы будут сбрасываться каждые две секунды, пока удерживается кнопка сброса бомбы.
Индикаторы состояния ракет

Окно индикаторов состояния ракет обеспечивает подтверждение установленных и настроенных ракет "воздух-воздух", описанных в главе 4.2.Ракеты "воздух-воздух".
Индикаторы радара
Индикаторы RDR (
Левая пара индикаторов указывает на станции 4 и 3 сверху вниз, а правая пара связана со станциями 6 и 7 соответственно.
Индикаторы теплового наведения
Индикаторы HEAT (
Левая пара индикаторов представляет станции 2L и 2R соответственно, а правая пара связана со станциями 8L и 8R.
Переключатель питания радиолокационных ракет

Переключатель питания радиолокационных ракет подаёт питание на излучатель непрерывных волн (CW) клистрона, отвечающий за сигналы наведения. Он также питает привод настройки Sparrow, который отвечает за настройку Sparrow на правильную несущую частоту непрерывных волн для наведения.
Когда ручка питания радара находится вне положения OFF, питание подаётся на цепь через 30 секунд после этого выбора.
Положение STBY поддерживает питание прогрева ракет и привода настройки непрерывных волн после настройки ракет. Это поддерживает Sparrow и привод настройки в тёплом состоянии, но Sparrow не настроены.
Положение CW ON обеспечивает постоянную настройку и мониторинг состояния ракет, когда радар не находится в режиме TV. Это также приводит к тому, что клистрон радара начинает излучать непрерывные волны.
Настройку можно выполнить на земле с радаром в режиме TEST, чтобы исключить излучение, опасное для наземного экипажа.
Индикатор наличия центрального бака

Загорается, когда существует состояние боеприпасов, которое препятствует катапультированию или запуску ракеты AIM-7, установленной в одном из двух передних положений. Чтобы использовать Sparrow на этих станциях, необходимо сначала сбросить центральный боеприпас.
Подробнее см.3.12.1 Система многозарядного оружия.
Переключатель блокировки

Двухпозиционный переключатель, который определяет, могут ли блокировки параметров запуска системы управления огнём предотвратить запуск AIM-7 при нажатии на спусковой крючок.
| Название | Описание |
|---|---|
| IN | Блокировки включены; ограничения дальности, ограничения ASE или радар, не находящийся в режиме визуального перехвата, блокируют запуск. |
| OUT | Блокировки отключены; AIM-7 запустится при нажатии на спусковой крючок, даже если условия запуска не выполнены. |
Селектор сброса
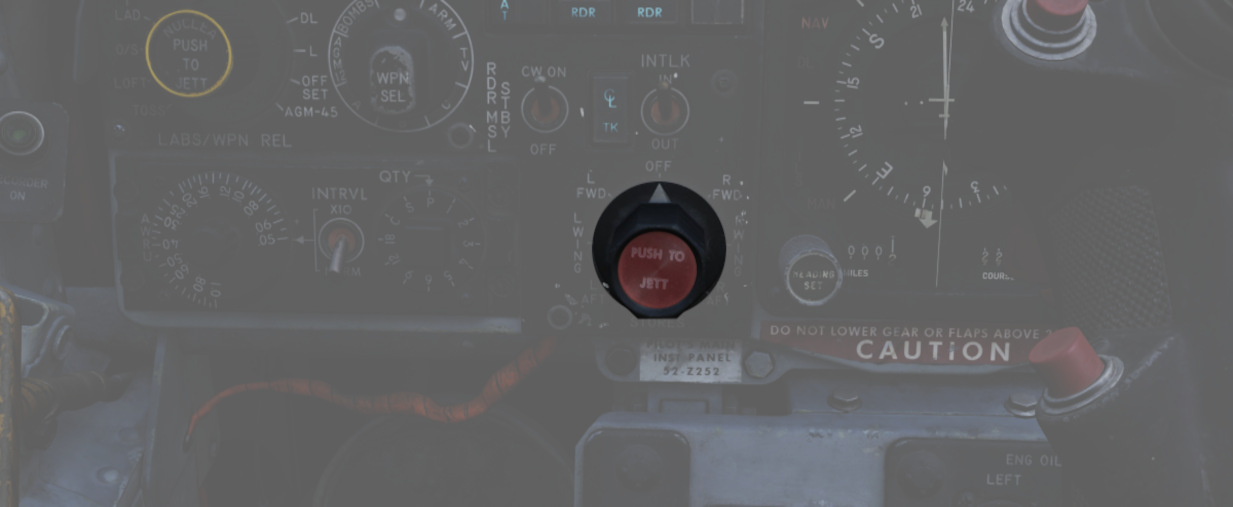
Ручка селектора сброса предоставляет пилоту прямой доступ к сбросу боеприпасов по позициям.
Пилот выбирает желаемую позицию, вращая ручку, а затем нажимает кнопку на её передней части, чтобы сбросить выбранные боеприпасы.
| Название | Описание |
|---|---|
| OFF | Блокирует кнопку PUSH TO JETT на панели селектора сброса. |
| STORES | Сбрасывает все MER/TER, одиночные, установленные на LAU-88 боеприпасы или подвесные баки, выбранные в данный момент на кнопках станции, при нажатии PUSH TO JETT. |
| L/R FWD | Jettisons AIM-7 Сбрасывает AIM-7 с соответствующей позиции при нажатии PUSH TO JETT. Заблокировано, если горит CL TK ON. |
| L/R AFT | Jettisons AIM-7 Сбрасывает AIM-7 с соответствующей позиции при нажатии PUSH TO JETT. |
| L/R WING | В сочетании с TV или ARM сбрасывает одиночную AGM-65 Maverick или AGM-45 Shrike с крыла при нажатии PUSH TO JETT. |
Например, чтобы сбросить правый и левый внешние топливные баки, пилот должен выбрать STORES на ручке, нажать соответствующие кнопки выбора станции LO, RO, а затем нажать кнопку сброса.
Индикатор регистратора

Эта лампа с регулируемой яркостью загорается, чтобы указать на работу бортового видеомагнитофона (AVTR).
Система AVTR управляется WSO и записывает звук внутренней связи, а также изображение заднего радиолокационного индикатора.
Группа директорного управления

Группа директорного управления предоставляет пилоту все необходимые приборы для пилотирования самолёта даже в условиях плохой погоды. Она включает в себя радиовысотомер (
Радиовысотомер

Точная информация о высоте относительно земли до 5000 футов, работает при крене до 30 градусов или тангаже до 35 градусов. Вращение по часовой стрелке ручки управления функциями (
Индикатор воздушной скорости и числа Маха

Комбинированный индикатор воздушной скорости и числа Маха показывает показания воздушной скорости ниже 200 узлов и включает числа Маха на внешнем кольце на высокой скорости. Индикатор использует одну стрелку над фиксированной шкалой воздушной скорости, отмеченной от 80 до 850 узлов, с подвижной шкалой Маха (
Индикатор угла атаки

Получая информацию о набегающем потоке от датчика угла атаки , расположенного рядом с шасси, индикатор угла атаки предлагает условную точку отсчёта для крейсерского полёта (7,9 единиц), захода на посадку (19,2 единиц) и сваливания (30 единиц). Из-за расположения датчика угла атаки на створке носовой стойки шасси и последующего возмущения воздушного потока при выпущенном шасси фактический угол атаки самолёта примерно на 1 единицу выше, чем указано, а рекомендуемый угол атаки для захода на посадку примерно на 5 узлов меньше, чем заданное значение.
Когда питание индикатора отключено из-за конфигурации или повреждения электрической системы, на лицевой панели прибора появится флажок OFF. Индикатор угла атаки содержит переключатели, которые зажигают индикаторы и включают вибратор предупреждения о сваливании.
Переключатель выбора системы отсчёта

Переключает между инерциальным навигационным комплектом и гироскопом смещения AN/AJB-7 для получения информации об ориентации. В положении PRIM инерциальный навигационный комплект предоставляет данные азимута и ориентации на ADI; в положении STBY эту информацию предоставляет AN/AJB-7. Данные азимута также поступают на HSI и BDHI (задняя кабина). Кроме того, данные об ориентации отправляются в систему управления огнём.
💡 Для получения инерциальной информации необходимо, чтобы переключатель панели управления инерциальным навигатором был включён в положение NAV.
При переходе между STBY и PRIM мгновенная информация об ориентации может показывать необычные колебания на авиагоризонте из-за начальной установки. Быстрые повороты (более 15° в минуту) могут временно нарушить точность информации о курсе и автоматическую синхронизацию информации о курсе. Если информация о курсе не синхронизируется сама после полёта по прямой и на одном уровне в течение примерно 20 секунд, требуется ручная синхронизация. Это можно сделать, пролетев по прямой и на одном уровне в течение примерно 20 секунд и повернув ручку выбора режима в подпружиненное положение SYNC примерно на 3 секунды.
Авиагоризонт

Включает в себя сферу ориентации, указатель поворота, рулевые полосы, миниатюрный самолёт, указатель глиссады, флажки и ручку триммера тангажа. Он отображает тангаж, крен и курс от выбранной системы отсчёта и позволяет регулировать тангаж с помощью ручки триммера. Указатель поворота использует гироскоп из системы AN/AJB-7. Рулевые полосы предлагают наведение директорного управления для перехвата курса, навигации и захода на посадку по ILS Указатель глиссады предоставляет информацию о вертикальном наведении во время захода на посадку по ILS.
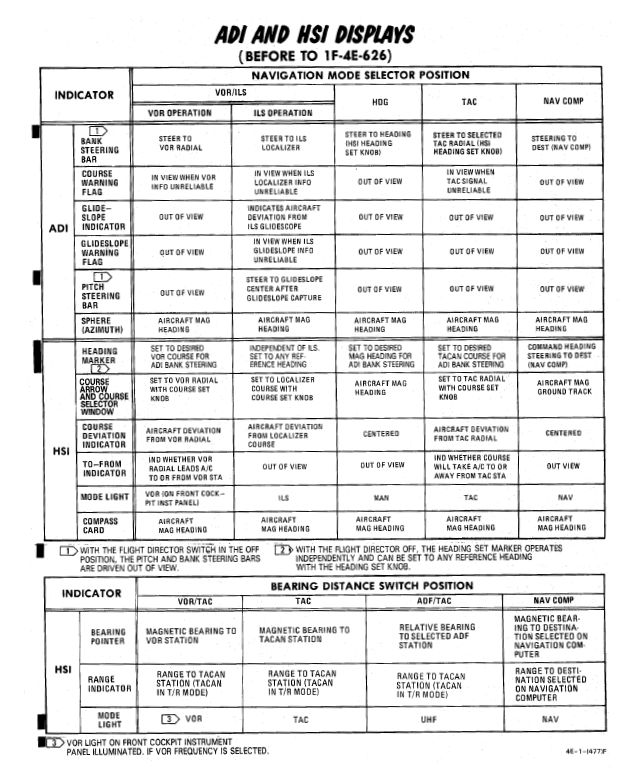
Индикатор курсового радиомаяка
![]()
Эта лампа загорается при пролёте над станцией курсового радиомаяка, если система VOR/ILS активирована. Кроме того, через систему внутренней связи воспроизводится звуковой сигнал.
Лампу можно вращать для регулировки яркости и нажимать для тестирования.
Курсовая система

Представляет горизонтальный вид навигационной ситуации относительно самолёта, обозначенный символом самолёта и курсовой чертой, показывающей текущий курс самолёта.
Ручки
Ручка в левом нижнем углу (
Карта компаса
Вращающийся элемент (
Он служит ориентиром для курса самолёта относительно магнитного севера.
Указатель пеленга
Указывает магнитный пеленг на выбранное навигационное средство (Nav Comp, VOR, TACAN или ADF).
Стрелка курса и индикатор отклонения
Направление, в котором указывает стрелка (
В режиме HDG он указывает магнитный курс самолёта, а в режиме NAV COMP - на магнитный путевой угол самолёта.
Индикатор отклонения обеспечивает визуальную обратную связь об отклонении самолёта от выбранного курса. Он показывает отклонение от курса TACAN в режиме TAC или отклонение от радиала VOR в режиме VOR/ILS, когда настроен VOR, и отклонение от сигнала локализатора ILS в режиме VOR/ILS, когда настроен ILS.
Индикатор направления
Показывает, приведёт ли текущий курс к приближению или удалению от настроенной станции, работает с сигналами TACAN и VOR.
Маркер курса
Маркер курса (
В режиме NAV COMP он отображает командное наведение на выбранную цель с учётом сноса ветром.
Индикатор дальности
Показывает расстояние (
Индикаторы режима
Несколько индикаторов (
- VOR: Указывает, что выбран режим VOR/ILS и выбрана частота VOR.
- ILS: Указывает, что выбран режим VOR/ILS и выбрана частота ILS.
- TAC: Показывает, что активен режим TACAN.
- NAV: Загорается, когда используется режим навигационного компьютера.
- MAN: Указывает, что выбран режим курса.
- UHF: Указывает, что активен режим ADF.
- TGT: Загорается во время определённых операций бомбометания со смещением радара.
Высотомер

Высотомер со стрелкой и счётчиком, с тысячами в окне счётчика (
Вариометр

Отображает скорость набора высоты или снижения с помощью системы статического давления в тысячах футов в минуту.
Резервный авиагоризонт

SAI работает независимо от группы директорного управления, обеспечивая достаточно точные показания (в пределах шести градусов) в течение 9 минут, если питание системы отключено и отображается флажок OFF. Отметки тангажа указаны каждые 5 градусов, а отметки крена - с шагом 10 градусов. Крен отображается на 360 градусов, а тангаж ограничен упорами на 92 градуса при наборе высоты и 78 градусов при пикировании, чтобы предотвратить блокировку кардана. SAI можно разблокировать, нажав на ручку, и оттриммировать, повернув её.
Панель выбора навигационной функции

Управляет отображением информации на ADI и HDI на основе выбранных значений на двух ручках; слева - ручка пеленга/расстояния (
Ручка пеленга/расстояния
| Название | Описание |
|---|---|
| VOR/TAC | Магнитный и относительный пеленг на станцию VOR и дальность TACAN отображаются на HSI. |
| TAC | Магнитный и относительный пеленг и дальность до станции TACAN отображаются на HSI. |
| ADF/TAC | Магнитный и относительный пеленг на станцию ADF и дальность TACAN отображаются на HSI. |
| NAV COMP | Магнитный и относительный пеленг и дальность, предоставляемые навигационным компьютером (т.е. путевые точки), отображаются на HSI. |
Функции отображения ручки выбора режима
Индикатор VOR
Загорается, чтобы указать, что система VOR готова к работе и принимает сигнал.
То есть выбрана допустимая частота VOR , сигнал принимается, а ручки навигации повернуты на навигацию VOR.
Правая основная панель

Правая основная панель даёт хороший обзор всех необходимых данных двигателя, а также вашего защитного приёмника радиолокационного предупреждения (RWR). На ней также расположены топливомер (
Азимутальный индикатор RWR

Азимутальный индикатор приёмника радиолокационного предупреждения показывает все источники радара, видимые для приёмника радиолокационного предупреждения. Ручка регулирует яркость дисплея.

Внизу находится блок с несколькими ручками для управления системой.
Дополнительную информацию и описание кнопок см. в главе Приёмник радиолокационного предупреждения.
Индикатор азимута-угла места

Индикатор азимута-угла места, или также индикатор линии визирования, является основным прибором для пилота для оценки текущего положения прицельного контейнера Pave Spike, чтобы поддерживать линию визирования в пределах эксплуатационных ограничений.
Стрелка показывает положение крена контейнера от -160° (по часовой стрелке) до +110° (против часовой стрелки).
Три флажка указывают на угол места:
- зелёный: от -120° до -155°
- жёлтый: от -155° до -160°
- красный: -160° или более
Если стрелка находится в пределах диапазона, обозначенного зелёным цветом, и не отображаются ни жёлтый, ни красный флажок, обзор не будет заблокирован контейнером или самолётом.
Индикатор главного предупреждения

Индикатор главного предупреждения загорается, чтобы предупредить пилота о состоянии, требующем внимания, направляя его к панели сигнальных ламп для получения дополнительной информации. Индикатор главного предупреждения сбрасывается путём исправления состояния или нажатием кнопки сброса главного предупреждения на панели управления генератором.
Кнопка тестирования пожарной сигнализации

При нажатии эта кнопка проверяет работоспособность индикаторов FIRE и OVRHT. В нормальных условиях все четыре индикатора должны загораться, пока кнопка нажата. Если индикатор не загорается, он, вероятно, неисправен и больше не может использоваться для индикации пожара.
Кнопку также можно использовать в сочетании с переключателем тестирования сигнальных ламп для проверки работы систем обнаружения пожара и перегрева.
Тест выполняется путём удержания переключателя тестирования сигнальных ламп в положении WARN TEST, а затем одновременного нажатия и отпускания кнопки тестирования пожарной сигнализации. Правильная работа системы подтверждается тем, что четыре индикатора FIRE и OVRHT не горят, пока кнопка тестирования пожарной сигнализации нажата, а затем загораются при её отпускании.
Индикаторы пожарной сигнализации/перегрева

Индикаторы пожарной сигнализации и перегрева, по одному на каждый двигатель, представляют собой пару двухпозиционных индикаторов, которые загораются при обнаружении пожара в моторном отсеке (FIRE) или перегрева в секции выхлопного сопла (OVRHT).
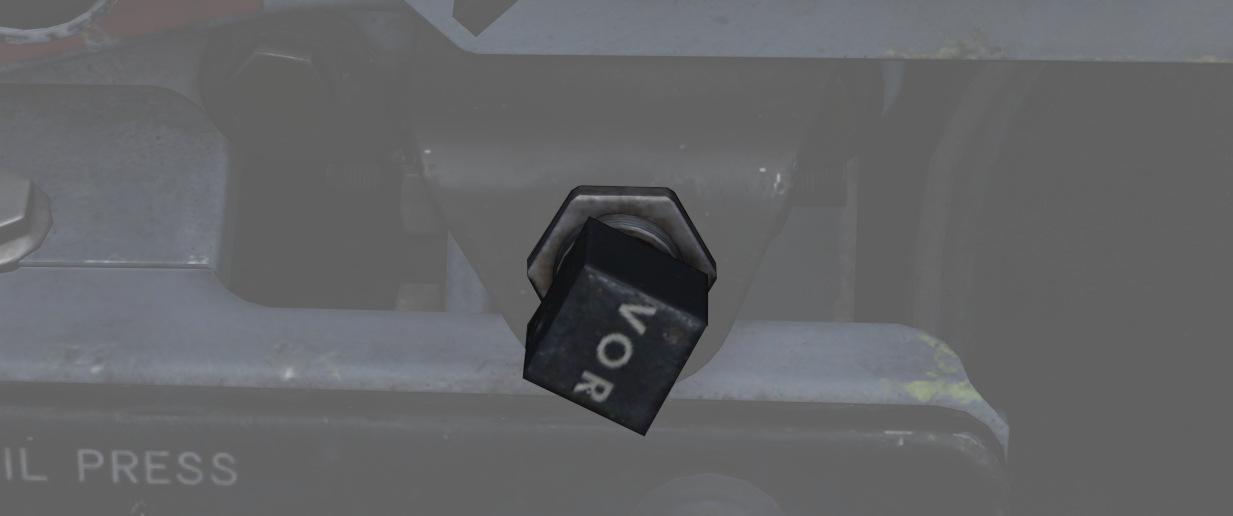
Топливомер
Топливомер предоставляет два различных показания общего количества используемого внутреннего топлива, чтобы подтвердить правильную работу системы перекачки между семью внутренними топливными баками, а также любыми загруженными внешними баками.
В верхней половине он отображает общее количество топлива в фюзеляже с помощью белой ленты на шкале, отмеченной от 0 до 10 (умножить на 1000 фунтов). Эти показания включают баки с 1 по 6, исключая резервный бак 7, оба внутренних бака крыла, а также любые внешние баки. На изображении лента находится вокруг метки 6, что указывает на общее количество внутреннего топлива около 6000 фунтов.
Кроме того, счётчик отображает всё внутреннее топливо с шагом 10 фунтов. То есть баки с 1 по 7, а также два внутренних бака крыла. Любые внешние баки также исключены. В примере счётчик показывает 0590, что указывает на 5900 фунтов внутреннего топлива.
💡 Количество топлива во внешних баках проверить нельзя. См. 3.2.2. Индикаторы топлива внешних баков, чтобы проверить, пусты ли они.
В качестве общего ориентира, топливо Bingo составляет около 4000 фунтов, а топливо Joker - 6000 фунтов.
Для получения более подробной информации см. главу 3.2.2 Топливная система.
Расходомеры топлива

Предусмотрена пара расходомеров топлива, по одному на каждый двигатель, отображающих расход в фунтах в час от 0 до 12 с шагом 1000 фунтов. Показания расхода относятся к базовой тяге без форсажа. На форсаже расход примерно в четыре раза превышает отображаемый расход.
Тахометры

Для каждого двигателя предусмотрен тахометр с процентной шкалой, включающий встроенное колесо для точного отображения однозначных чисел. Нормальные значения: 65% для холостого хода, 95% для полной тяги MIL и 105% для полного форсажа.
Индикаторы температуры выхлопных газов

Индикаторы температуры выхлопных газов предусмотрены для каждого двигателя. Приборы имеют две стрелки - большую стрелку с шагом от 0 до 12, кратным 100 градусам Цельсия, и меньшую стрелку с шагом от 0 до 10, кратным 10 градусам Цельсия. Температура измеряется на выходе из турбины.
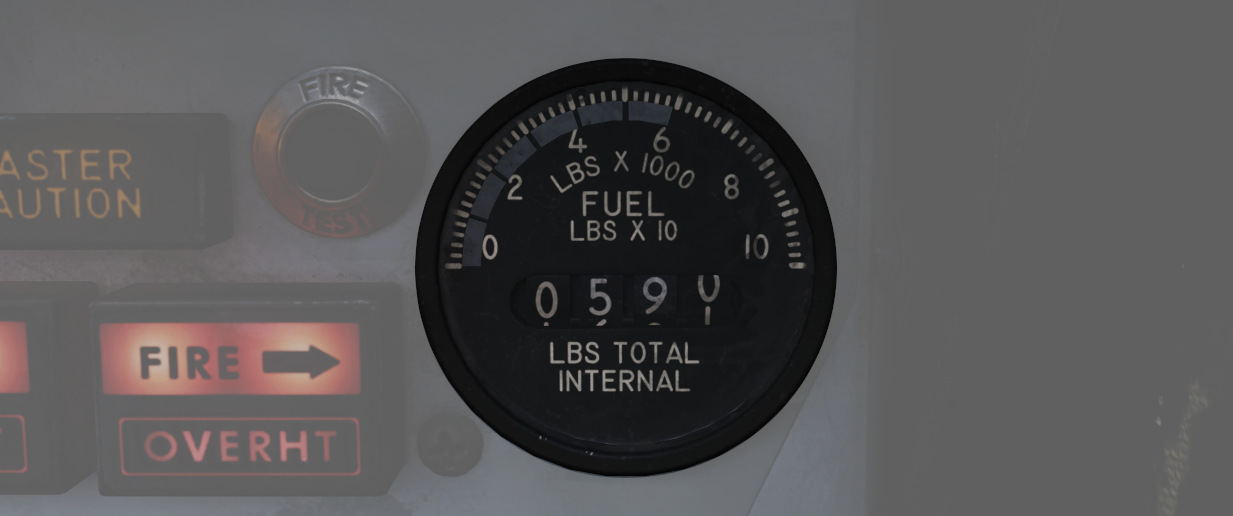
Индикаторы положения сопла
Предусмотрен комбинированный индикатор положения сопла с двумя стрелками, по одной на каждый двигатель на соответствующей стороне, для подтверждения сбалансированного положения сопла и его регулировки относительно положения РУД. Прибор имеет четыре зоны относительно того, находятся ли сопла в полностью открытом положении (стрелка полностью слева) или в максимально закрытом положении (стрелка полностью справа). На холостом ходу показания будут примерно 7/8 открытого положения, и по мере увеличения тяги положение будет уменьшаться. Положение в зоне форсажа будет регулироваться для поддержания безопасного уровня EGT.
Левая вспомогательная панель

Левая вспомогательная панель содержит индикаторы шасси (
Часы с восьмидневным запасом хода

Часы предусмотрены для пилота, включая функцию секундомера. Часы имеют часовую и минутную стрелки, их можно установить, повернув ручку (
Рычаг шасси

Приводит в действие шасси; поднят для уборки шасси, опущен для выпуска шасси.
Вытягивание рычага активирует аварийный режим и выпускает шасси с помощью пары баллонов со сжатым воздухом.
💡 Шасси нельзя убрать на земле.
Индикаторы положения шасси
Индикаторы положения шасси обеспечивают визуальное подтверждение текущего состояния шасси, отображая UP при убранном шасси, показывая диагональные полосы во время перехода или изображение колеса в соответствующем окне при полностью выпущенном и зафиксированном шасси.
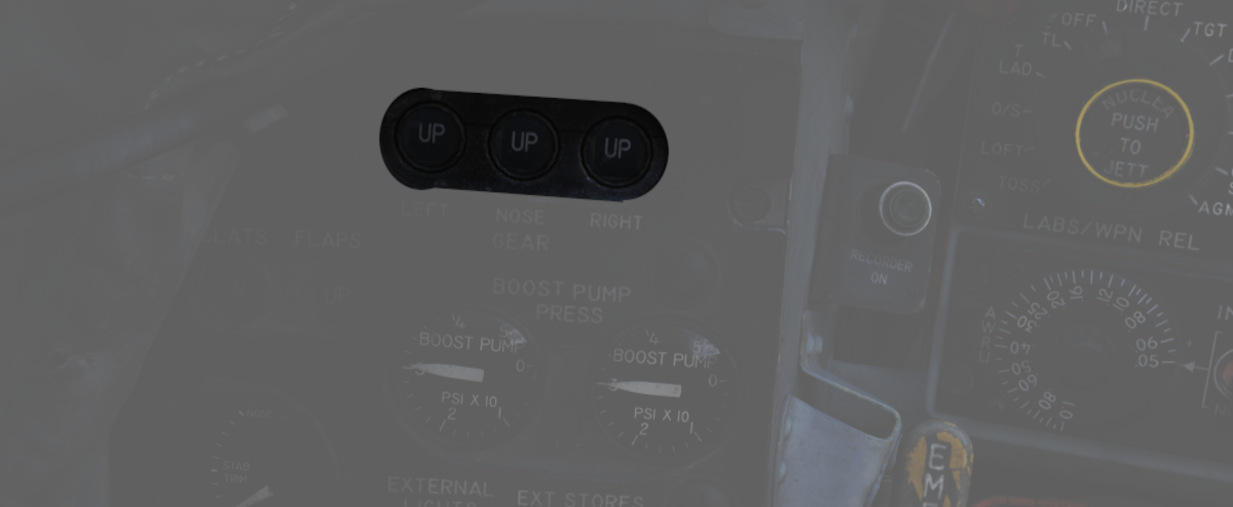
Индикаторы предкрылков/закрылков
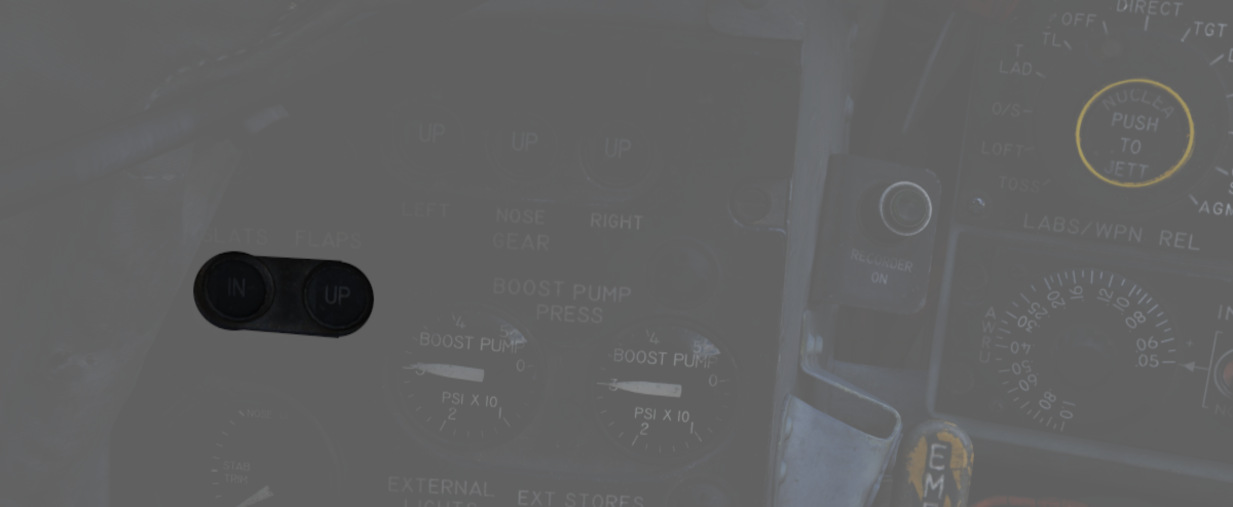
Визуальная индикация систем предкрылков и закрылков обеспечивается двумя оконными индикаторами. Предкрылки будут отображаться как IN (убраны) или OUT (выпущены). Закрылки будут отображаться как UP (убраны) или DN (выпущены) и будут показывать диагональные полосы во время перехода.
Индикаторы давления насоса наддува

Пара индикаторов обеспечивает подтверждение работы топливных насосов наддува. Индикаторы откалиброваны от 0 до 5, что необходимо умножить на 10, чтобы получить показания в текущих PSI.
Индикатор триммера стабилизатора

Отображает текущую настройку триммера стабилизатора в единицах триммера (не равно градусам). Для взлёта триммер должен быть установлен на 1-3 единицы на пикирование.
Переключатель посадочного/рулёжного освещения

Управляет внешними посадочными и рулёжными фарами. Для работы переключателя левая основная стойка шасси должна быть опущена и зафиксирована.
💡 Освещение выключается автоматически при уборке шасси.
Кнопка аварийного сброса внешних боеприпасов

Также называемая "тревожной кнопкой", кнопка аварийного сброса внешних боеприпасов немедленно выполняет отделение всех боеприпасов, кроме оружия оружия воздух-воздух и специального оружия.
Автоматический выключатель ARI (взаимосвязь элеронов и руля направления)

Вытягивание этого элемента полностью отключает Yaw ARI, если стабилизация рыскания в ней отключена. Если же стабилизация рыскания включена, то Yaw ARI все равно будет работать, но её влияние на руль направления будет ограничено 5 градусами.
Дополнительную информацию см. в разделе 3.1.2 Органы управления полётом и AFCS.
Рычаг аварийного тормоза

Вытягивание этого рычага активирует аварийную гидравлическую тормозную систему, сбрасывая оставшееся давление из гидроаккумулятора в тормозную систему для ограниченного количества торможений. Обратите внимание, что дифференциальное торможение будет работать как обычно, но также будет способствовать более быстрому расходу гидравлического давления.
Левая консоль
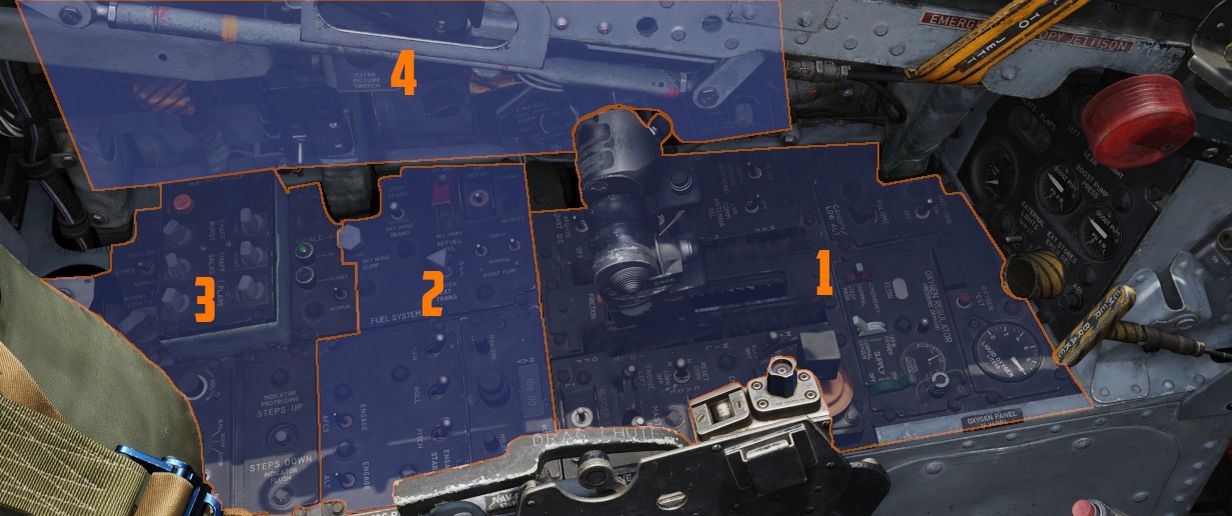
Левая консоль дополнительно разделена на 4 секции.
| Секция | Название |
|---|---|
| 1. | Передняя |
| 2. | Центральная |
| 3. | Задняя |
| 4. | Стенка |
Передняя секция
Передняя секция левой консоли содержит кислородную панель, РУД и органы управления двигателем.
Левая вспомогательная панель

Переключатель противоскользящей системы

Двухпозиционный переключатель (
Индикатор неисправности противоскользящей системы

Загорается, когда переключатель противоскользящей системы установлен в положение OFF, нажат рычаг аварийного быстрого сброса или возникла проблема с противоскользящей системой.
Громкость предупреждения о не зафиксированном фонаре/малой высоте

Поворотный регулятор (
Эта система не установлена на данном варианте F-4E.
Кислородный регулятор и индикатор количества кислорода

Рычаг подачи
Двухпозиционный переключатель (
Рычаг разбавления
Двухпозиционный рычаг разбавления (
Для пропорционального количества воздуха и кислорода следует выбрать положение NORMAL OXYGEN.
Для чистого кислорода следует выбрать положение 100% OXYGEN. Эта настройка предпочтительна при возникновении пожара, токсичного дыма или паров в кабине.
Аварийный рычаг
Трёхпозиционный переключатель (
Рычаг должен всегда оставаться в центральном положении (NORMAL), если не требуется незапланированное повышение давления.
Индикатор потока
Чередуется между чёрным и белым (
Манометр кислорода
Манометр кислорода (
Для получения дополнительной информации см. главу 3.7 Вспомогательное оборудование, раздел Кислород.
Индикатор количества кислорода
Индикатор количества кислорода (
Кнопка тестирования количества кислорода
Кнопка (
При нажатой кнопке стрелки обоих приборов должны переместиться на нулевое значение.
Когда стрелка в передней кабине проходит через отметку 1 литр, сигнальная лампа OXYGEN LOW на передней панели сигнальных ламп должна загореться и оставаться гореть до тех пор, пока кнопка не будет отпущена, а стрелка не переместится выше отметки 1 литр.
Передняя рукоятка управления
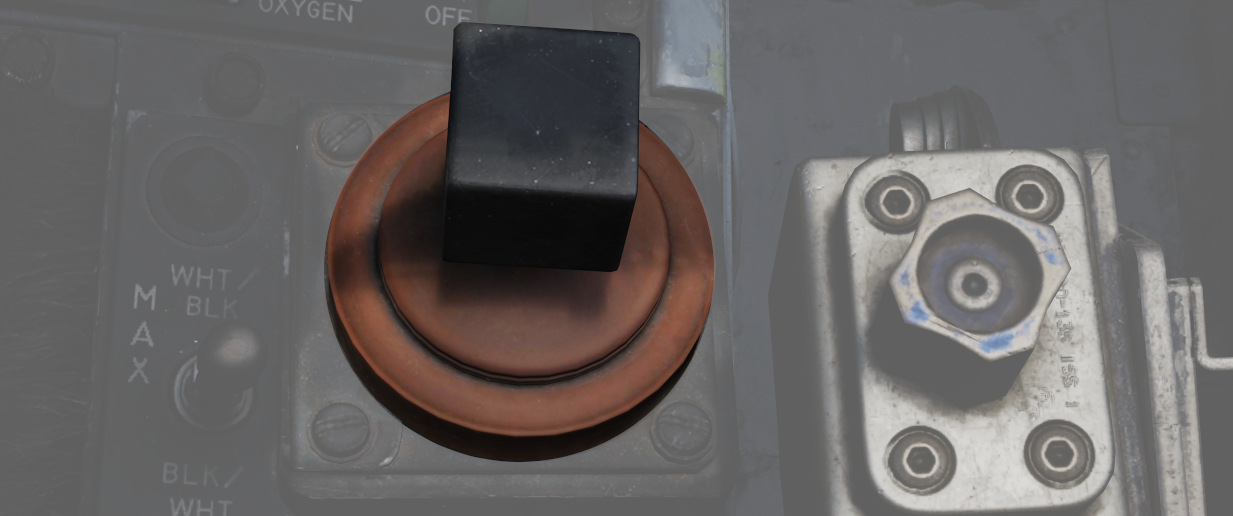
Небольшой джойстик, позволяющий пилоту управлять и наводить управляемое оружие, такое как Maverick или Bullpup.
Внешняя панель управления двигателем

Переключатель противообледенения двигателя
Двухпозиционный переключатель (
Систему следует использовать только на скоростях ниже высоких чисел Маха. На высоких скоростях температура на входе в компрессор достаточна для предотвращения образования льда.
Переключатель выбора антенны связи
Двухпозиционный переключатель (
Верхнее положение следует использовать для взлёта и посадки, так как нижняя антенна может создавать помехи для датчика скорости вращения колёс противоскользящей системы и, таким образом, вызывать неисправность противоскользящей системы. Нижняя антенна также может создавать помехи для управления носовой стойкой шасси во время передачи. Это происходит из-за электромагнитных помех, излучаемых нижней антенной UHF.
Переключатель LCOSS
Двухпозиционный переключатель (
- ARS-107
- ASG-26
Переключатель является рудиментом и не подключён.
Переключатель DVST
Двухпозиционный переключатель (
- APS-107
- APQ-120
Переключатель является рудиментом и не подключён.
Внутренняя панель управления двигателем

Внутренняя панель управления двигателем содержит следующие органы управления:
Переключатель контрастности цели
Трёхпозиционный переключатель (
| Название | Описание |
|---|---|
| WHT/BLK | Программирует головку самонаведения ракеты на отслеживание светлой цели на тёмном фоне. |
| AUTO | Программирует ракету на использование автоматического режима слежения. |
| BLK/WHT | Программирует головку самонаведения ракеты на отслеживание тёмной цели на светлом фоне. |
💡 Это не меняет полярность видеосигнала, а меняет кодировку самой головки самонаведения.
Переключатель запуска двигателя
Трёхпозиционный переключатель (
Переключатель коррекции компенсатора статического давления CADC
Трёхпозиционный переключатель (
| Название | Описание |
|---|---|
| RESET CORR | Активируется после запуска двигателя, затем в полёте, если предупреждение SPC вызвано переходными процессами. |
| NORM | Обычное рабочее положение переключателя после отпускания RESET CORR или включения из положения CORR OFF. |
| CORR OFF | Отключает компенсацию запаздывания высоты SPC вручную. |
Главные переключатели двигателя

Пара двухпозиционных переключателей с фиксацией (
Переключатель триммера руля направления
Трёхпозиционный переключатель с автоматическим возвратом в центральное положение (
РУДы

РУДы для каждого двигателя F-4E Phantom II расположены на левой консоли передней и задней кабин. Механическая тяга передаёт движение РУД на регулятор подачи топлива двигателя. Рычаг регулировки трения позволяет настроить трение РУД. Включение форсажа происходит путём смещения РУДов наружу и перемещения вперёд из положения MIL. Порог форсажа можно регулировать в специальных настройках модуля.
Движение РУДов плавное и непрерывное, с возможностью модуляции форсажа во всём диапазоне. Перемещение РУДов из IDLE в OFF закрывает топливный запорный клапан, останавливая подачу топлива. Для перехода из OFF в IDLE или MIL переместите РУДы прямо вперёд. Смещение РУДов наружу позволяет перейти из MIL в MAX, обеспечивая движение вперёд в диапазоне форсажа. Для получения дополнительной информации см. главу 3.1.2 Двигатели.
Подъёмные рычаги
РУДы передней кабины оснащены подъёмными рычагами (
Кнопки зажигания
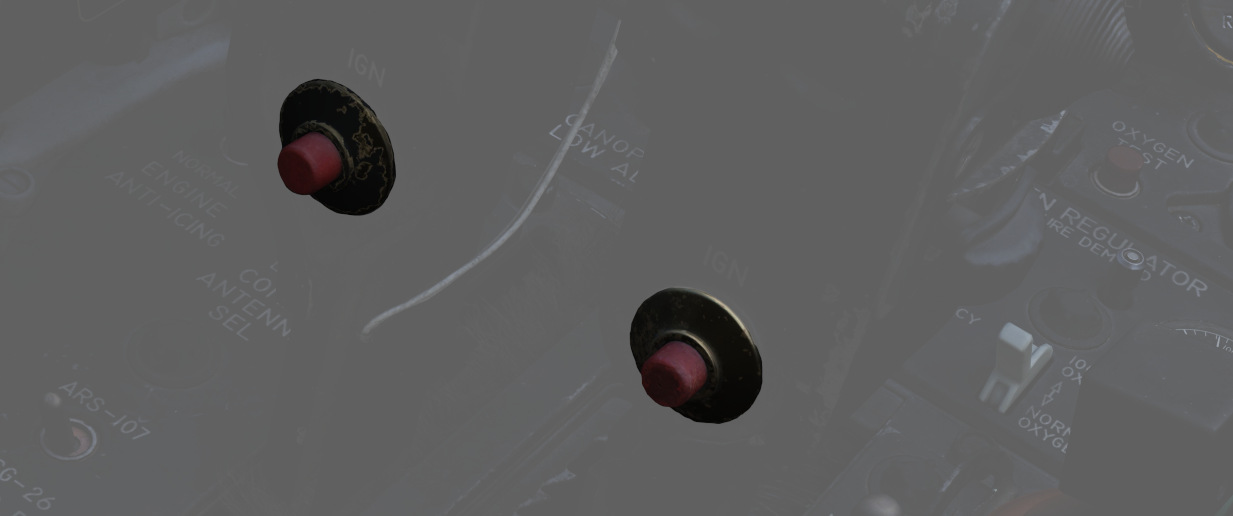
Зажигание двигателя для запуска осуществляется с помощью пары свечей зажигания на каждом двигателе, активируемых нажатием красной кнопки зажигания (
Кнопка CAGE

Подпружиненная кнопка (
Кнопка сброса

При нажатии кнопки сброса (
Воздушный тормоз

Воздушные тормоза приводятся в действие трёхпозиционным переключателем (
Переключатель микрофона

Переключатель микрофона (
Мизинцевый переключатель
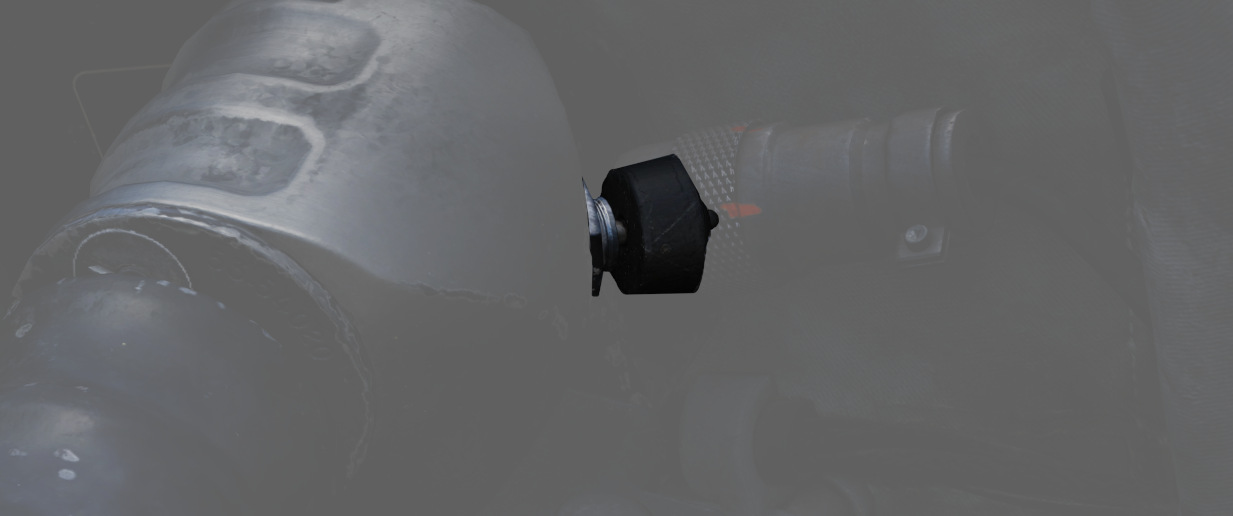
Переключатель пушки/ракеты (мизинцевый переключатель) - это четырёхпозиционный переключатель (
Центральная секция
Центральная секция левой консоли управляет настройками топлива и навигации.
Панель управления топливом
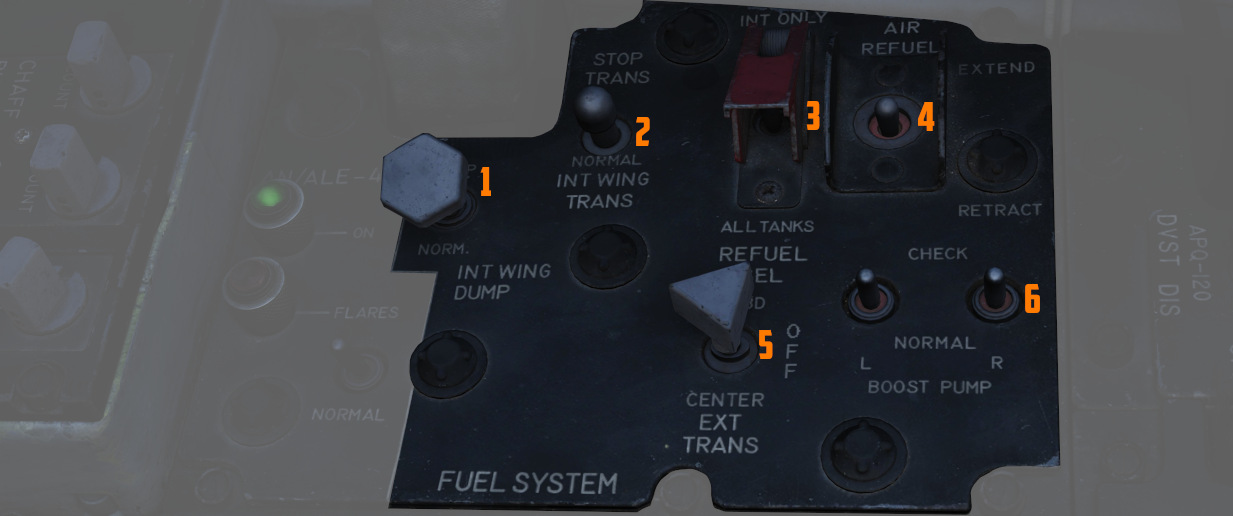
Переключатель сброса топлива из внутренних баков крыла
Двухпозиционный переключатель (
Всё топливо сбрасывается примерно за 15 минут.
Переключатель перекачки топлива из внутренних баков крыла
Двухпозиционный переключатель (
Перекачка происходит только без нагрузки на колёса и если внутренние баки уже достигли определённого уровня топлива.
Переключатель выбора дозаправки
Этот закрытый переключатель (
Переключатель дозаправки топливом в воздухе
Двухпозиционный тумблер (
Если во время дозаправки топливом в воздухе штанга отсоединяется и загорается индикатор DISENGAGED, этот переключатель необходимо перевести в положение RETRACT, а затем обратно в EXTEND, чтобы сбросить систему и снова подключить штангу.
Переключатель внешней перекачки
Трёхпозиционный тумблер (
Перекачка происходит только без нагрузки на колёса и если внутренние баки уже достигли определённого уровня топлива.
Невозможно перекачивать топливо из баков крыла и внешних баков одновременно. Если выбраны оба варианта, приоритет будут иметь внешние баки.
Переключатели проверки насоса наддува
Пара двухпозиционных подпружиненных переключателей (
Панель управления VOR/ILS

Ручка громкости навигации
Ручка громкости навигации (
Необходимо переместить из крайнего положения против часовой стрелки, чтобы подать питание на систему VOR/ILS.
Ручка громкости курсового радиомаяка
Ручка громкости курсового радиомаяка (
Ручки настройки частоты
Набор из двух ручек (
Допустимые частоты находятся в диапазоне от 108,00 до 117,95 МГц.
VOR/MKR Тест
Кнопка (
Панель управления AFCS

Переключатели каналов стабилизации (тангаж/крен/рыскание)
Три двухпозиционных переключателя (
Дополнительную информацию см. в разделе 3.1.2 Органы управления полётом и AFCS.
Переключатель режима AFCS
Двухпозиционный переключатель (
Переключатель удержания высоты
Двухпозиционный переключатель (
Задняя секция
Задняя секция левой консоли содержит органы управления внутренней связью и средствами противодействия.
Индикатор трапа

Используется для визуального подтверждения состояния встроенного трапа. Если белый столбик поднят, трап убран, а если столбик опущен и заподлицо с углублением на панели, трап выпущен. Трап перемещается начальником экипажа.
Панель управления внутренней связью

Ручка регулировки громкости
Ручка регулировки громкости (
Ручка выбора усилителя
Ручка выбора усилителя (
| Название | Описание |
|---|---|
| B/U | Резервный усилитель гарнитуры обеспечивает звук. |
| NORM | Основной усилитель гарнитуры обеспечивает звук. |
| EMER | Использует усилитель из противоположной кабины; слышен весь и только звук, включая радио, принимаемое в этой кабине. |
Переключатель выбора функции
Переключатель выбора функции имеет три положения (
| Название | Описание |
|---|---|
| COLD MIC | Переключатель микрофона на РУД необходимо удерживать, чтобы активировать внутреннюю связь. |
| HOT MIC | Переключатель микрофона на РУД необходимо удерживать, чтобы активировать внутреннюю связь. |
| RADIO OVERRIDE | Голос автоматически передаётся по внутренней связи. Громкость всех звуков, кроме тона Shrike и предупреждения о сваливании, уменьшается. |
Программатор AN/ALE-40

Панель имеет 6 ручек для управления сбросом дипольных отражателей и тепловых ловушек , а также две лампы и переключатель.
Ручки
Есть два важных определения, которые нужно знать при настройке средств противодействия:
- BURST - одиночный сигнал сброса
- SALVO - группа импульсов
С помощью шести ручек, расположенных на программаторе, можно настроить следующие параметры:
| Категория | Ручка | Значения | Описание |
|---|---|---|---|
| Сброс дипольных отражателей | COUNT ( | 1, 2, 3, 4, 6, 8 | Количество импульсов (на залп) |
| INTERVAL ( | 0.1, 0.2, 0.3, 0.4 | Временной интервал между каждым импульсом | |
| Залп дипольных отражателей | COUNT ( | 1, 2, 4, 8, C (непрерывный) | Количество залпов |
| INTERVAL ( | 1, 2, 3, 4, 5, 8, R (случайный) | Временной интервал между каждым залпом | |
| Сброс тепловых ловушек | COUNT ( | 1, 2, 4, 8, C (непрерывный) | Количество импульсов |
| INTERVAL ( | 3, 4, 6, 8, 10 | Временной интервал между каждым импульсом |
💡 Все интервалы выражены в секундах.
Переключатель выбора тепловых ловушек
Переключатель выбора тепловых ловушек (
В положении NORMAL средства противодействия сбрасываются в соответствии с комбинированными настройками CCU и программатора.
Положение FLARES позволяет пилоту сбрасывать одиночную тепловую ловушку при каждом нажатии кнопки сброса независимо от настроек CCU и программатора.
Индикатор включения
Индикатор включения (
Индикатор тепловых ловушек
Индикатор тепловых ловушек (
Переключатель быстрой установки гироскопа

Выбирает режим работы гироскопа. FAST ERECT можно использовать кратковременно для коррекции отклонений гироскопа.
Подробнее см. 3.11.4. ARBCS.
Регулятор звукового тона

Ручка для регулировки громкости тонов оружия, таких как головка самонаведения Sidewinder.
Регулятор противоперегрузочного костюма

Противоперегрузочная система подаёт вспомогательный воздух низкого давления в противоперегрузочные костюмы, при этом воздух проходит через регулятор противоперегрузочного костюма, прежде чем попасть в костюм. Костюм остаётся спущенным до примерно 1,5 G, и по мере того, как перегрузки достигают или превышают этот уровень, воздух пропорционально поступает в костюм. Костюм остаётся надутым в зависимости от постоянных перегрузок и начинает сдуваться по мере уменьшения перегрузок.
Кнопка ручного надувания в регуляторе противоперегрузочного костюма позволяет экипажу вручную надуть костюм для проверки системы или снятия усталости. Предохранительный клапан в системе срабатывает при давлении примерно 11 фунтов на квадратный дюйм, служа резервной защитой в случае неисправности. Система работает автоматически всякий раз, когда работает двигатель, обеспечивая постоянную поддержку владельца при различных условиях перегрузки.
Левая стенка
Панель SAI
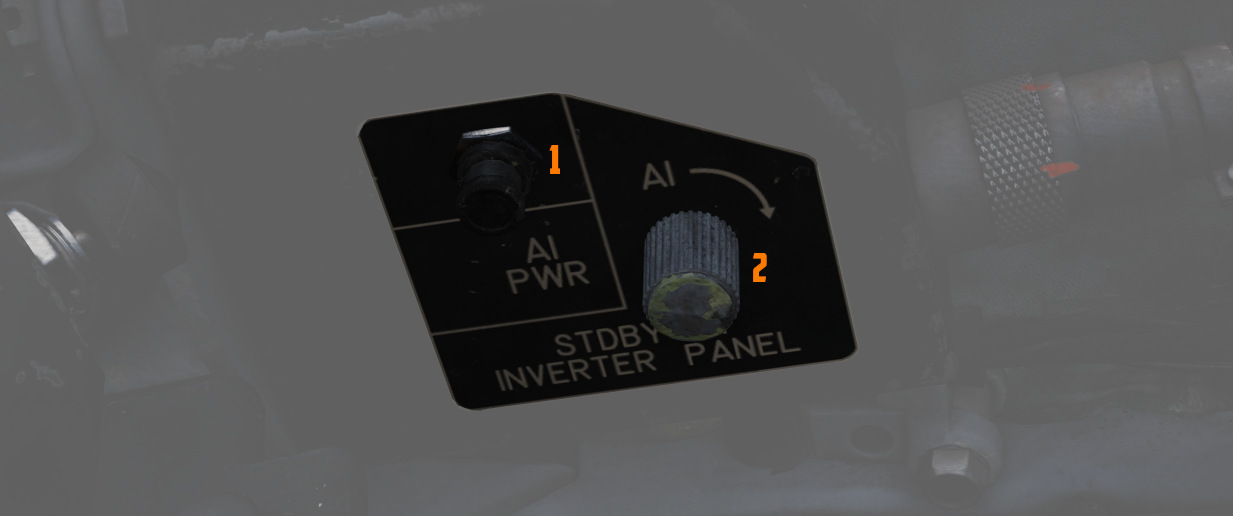
Панель содержит автоматический выключатель (
Индикатор/переключатель катапультирования

Нажимается пилотом в аварийной ситуации, требующей катапультирования из самолёта, что включает индикатор EJECT в задней кабине, предупреждая WSO о необходимости подготовиться к немедленному катапультированию.
Панель управления предкрылками/закрылками
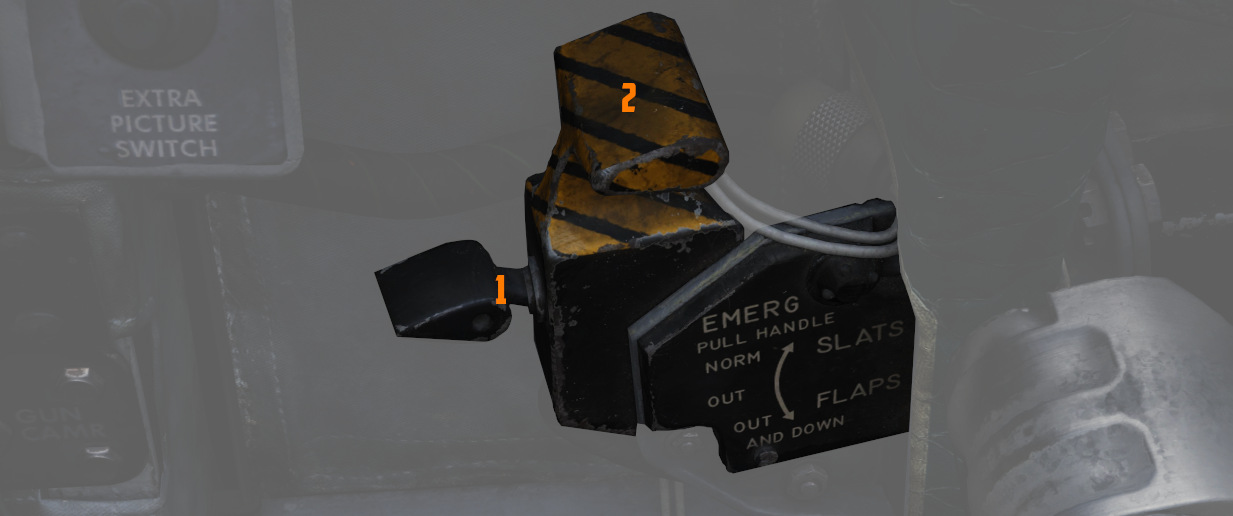
Трёхпозиционный переключатель (
Носовая стойка шасси убрана
| Название | Описание |
|---|---|
| NORM | Закрылки убраны, предкрылки работают в зависимости от угла атаки. |
| OUT | Предкрылки выпускаются. |
| OUT AND DOWN | Предкрылки и закрылки выпускаются (индикатор шасси мигает, пока шасси не будет выпущено). |
Носовая стойка шасси выпущена
| Название | Описание |
|---|---|
| NORM | Закрылки убраны, предкрылки работают в зависимости от угла атаки. |
| OUT | Предкрылки и закрылки выпускаются. |
| OUT AND DOWN | Предкрылки и закрылки выпускаются. |
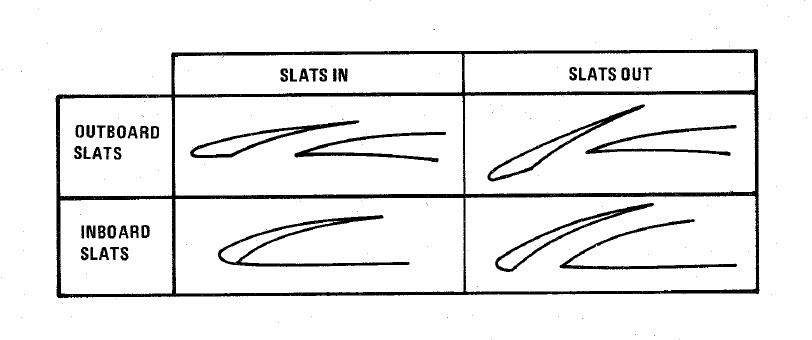
Аварийный рычаг предкрылков/закрылков
Также в верхней части блока находится аварийный рычаг выпуска предкрылков/закрылков (
Аварийный рычаг сброса фонаря

Используемый для аварийной эвакуации на земле, аварийный рычаг сброса фонаря выпускает баллон со сжатым кислородом, чтобы немедленно открыть соответствующий фонарь, отрывая его от шарниров.
Переключатель управления фонарём

Используется для открытия (назад) или закрытия (вперёд) фонаря пилота.
Переключатель дополнительного снимка

Переключатель дополнительного снимка, предназначенный для управления фотопулемётом KB-18 без сброса оружия, запускает камеру с выбранной частотой кадров.
Переключатель фотопулемёта

Активирует фотопулемёт, который будет работать до тех пор, пока переключатель не будет установлен в положение выключения, или до нажатия кнопки сброса бомбы или второго положения спускового крючка после завершения запрограммированного времени перебега.
Переключатель отключения предкрылков

Двухпозиционный защищённый переключатель с положениями IN и NORM. В положении NORM предкрылки работают нормально в зависимости от положения переключателя предкрылков/закрылков или угла атаки. В положении IN предкрылки убираются и остаются убранными. Выбор IN включает индикатор SLATS IN на панели сигнальных ламп и индикатор главного предупреждения.
Переключатель отключения предохранителя вооружения

При нажатии и установке рычага шасси в опущенное положение отключает предохранитель вооружения.
Это позволяет, например, стрелять из пушки на земле.
Группа на пьедестале

Группа на пьедестале включает в себя переключатель источника экрана (
Акселерометр

Откалиброван от -4 до +10 в единицах G, с тремя стрелками - одна для текущей приложенной нагрузки, две другие показывают максимальную положительную и отрицательную перегрузку, приложенную во время полёта. Нажатие кнопки PUSH TO SET сбросит индикаторы максимального положения на 1 G.
Индикаторы давления масла двигателя

Предусмотрена пара индикаторов давления масла двигателя, по одному на каждый двигатель, откалиброванных от 0 до 100 фунтов на квадратный дюйм. Масло двигателя используется для смазки, позиционирования регулируемого сопла и работы блока постоянной скорости. Важные значения:
- 12 фунтов на квадратный дюйм - минимум на холостом ходу
- 30-60 фунтов на квадратный дюйм - в полёте на тяге MIL
- 35 фунтов на квадратный дюйм - статический минимум на тяге MIL
- 60 фунтов на квадратный дюйм - максимум
Дополнительную информацию см. в главе 3.2.1 Двигатели.
Индикаторы гидравлического давления

Установлены два индикатора гидравлического давления. Правый относится к давлению вспомогательной гидравлической системы, а левый - к гидравлическим системам PC-1 и PC-2; последний включает в себя две стрелки, которые соответственно обозначены. Датчики давления, по одному для каждой системы, преобразуют импульсы давления в электрические импульсы, которые, в свою очередь, подаются на индикаторы. Номинальное рабочее давление для всех трёх систем составляет 3000 ±250 фунтов на квадратный дюйм. Другие важные значения:
- 2000-2750 - нормальное значение при быстром перемещении органов управления
- 2750-3250 - нормальное значение
- 3250-3400 - если давление превышает 3250 в установившемся режиме, необходимо сделать запись в форме 781
- 3400 - максимум
Дополнительную информацию см. в главе 3.5 Гидравлика.
Индикатор пневматического давления
Показывает давление в коллекторе пневматической системы, измеренное датчиком давления, который подаёт электрические сигналы на индикатор. Имейте в виду, что он не показывает давление в отдельных аварийных пневматических баллонах. Нормальный диапазон давления в системе составляет от 2650 до 3300 фунтов на квадратный дюйм из-за допусков датчика давления и манометра.
Другие важные значения:
- 3300-3500 - зона внимания
- 3500 - максимум
Дополнительную информацию см. в главе 3.6 Пневматика.
Переключатель источника экрана

Управляет тем, какой источник видеосигнала отображается на экране DSCG. Это не зависит от WSO, что позволяет пилоту просматривать источник, отличный от WSO.
В положении Radar на экране будет отображаться радар. TV будет отображать либо видеосигнал с оружия, такого как Maverick, либо изображение с камеры прицельного контейнера; в зависимости от кнопки выбора видеосигнала в кабине WSO.
Положение Off выключает экран.
Переключатель темпа стрельбы

Используется для переключения темпа стрельбы пушки между HIGH (6000 выстрелов в минуту) и LOW (4000 выстрелов в минуту).
Переключатель автоматической очистки

Пушка сделает примерно от 5 до 11 выстрелов с момента отпускания пилотом спускового крючка, чтобы очистить все затворы в пушке. Этот процесс раскрутки занимает примерно одну секунду, в течение которой пушка не может стрелять. Это относится только к внешним пушечным контейнерам, а не к основной пушке.
Опцию AUTO CLEAR следует использовать всякий раз, когда используется пушечный контейнер.
Индикатор оставшихся боеприпасов

Показывает текущее количество доступных боеприпасов для носовой пушки. Счётчик должен устанавливаться пилотом вручную при каждом перезаряжании.
Органы управления Shrike
Два переключателя для управления настройками AGM-45 Shrikes/
Переключатель отклонения TGT/MSL

Двухцелевой переключатель для управления Mavericks и Shrikes.
Для Maverick подпружиненное положение TGT/MSL REJ переключает доступные Maverick, выбранные и включённые в данный момент. Если установлены шесть Maverick, переключается станция с незафиксированной и активной Maverick. Чтобы переключить другую станцию, просто отключите активную станцию и выберите другую. Положение DF REJ не работает.
Для Shrike TGT/MSL REJ полностью отключает головку самонаведения оружия до сброса. Положение DF REJ выбирает режим WRCS для получения решения, а центральное положение вместо этого использует собственную, менее точную систему самонаведения оружия.
Переключатель диапазона
Позволяет выбрать диапазон частот, принимаемый Shrikes.
💡 Не все варианты поддерживают переключение диапазонов.
Кривошип регулировки педалей руля направления

Используется для регулировки эргономичного положения педалей руля направления вперёд или назад от пилота.
Требуется 38 полных оборотов, чтобы переместить педали по всему диапазону.
Правая вспомогательная панель

Правая вспомогательная панель в основном занята группой сигнальных ламп. На ней также расположены ручка ручного разблокирования фонаря (
Индикаторы генератора
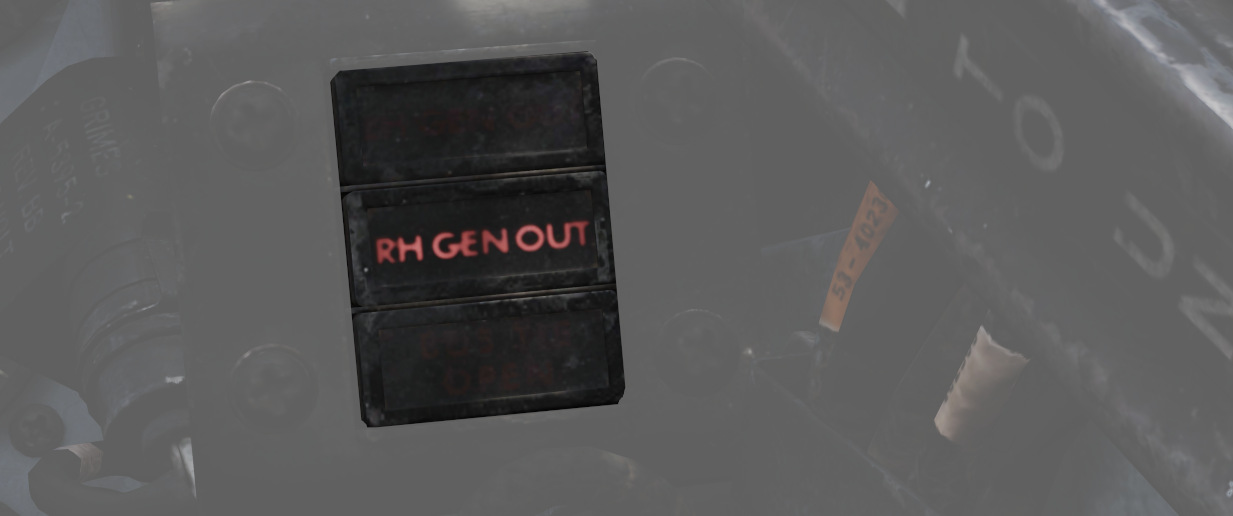
Индикаторы LH GEN OUT (слева), RH GEN OUT (справа) и BUS TIE OPEN загораются, когда указанный генератор отключён, или, в случае BUS TIE OPEN, когда генераторы не работают параллельно. Индикаторы вызывают главное предупреждение. В случае отказа обоих генераторов ни один из них не загорится.
Дополнительную информацию см. в главе 3.8 Электрика.
Переключатель проверки топливного бака
Двухпозиционный подпружиненный переключатель, используемый для подтверждения номинального количества топлива в топливном баке двигателя (бак 1), положения - FEED TANK CHECK и NORM (по умолчанию).
Когда выбрано и удерживается положение FEED TANK CHECK, топливомер будет показывать только текущее количество топлива в топливном баке двигателя как на ленте, так и на счётчике. Когда топливный бак полон, отображаемое значение должно составлять 1400 фунтов ±200 фунтов на счётчике, а значение на ленте должно составлять 1400 фунтов ±150 фунтов.
Рычаг управления тормозным крюком

Вытягивание рычага вниз выпускает тормозной крюк.
💡 Крюк используется для аварийного торможения на аэродроме. F-4E не поддерживает операции с авианосцев.
KY-28 Mode Light Panel

В зависимости от режима подсвеченный дисплей показывает P для режима Plain
(
💡 Для связи UHF требуется, чтобы система находилась в режиме Plain, даже при выключенном питании системы, за исключением использования и мониторинга защищённого канала.
Telelight Annunciator Panel
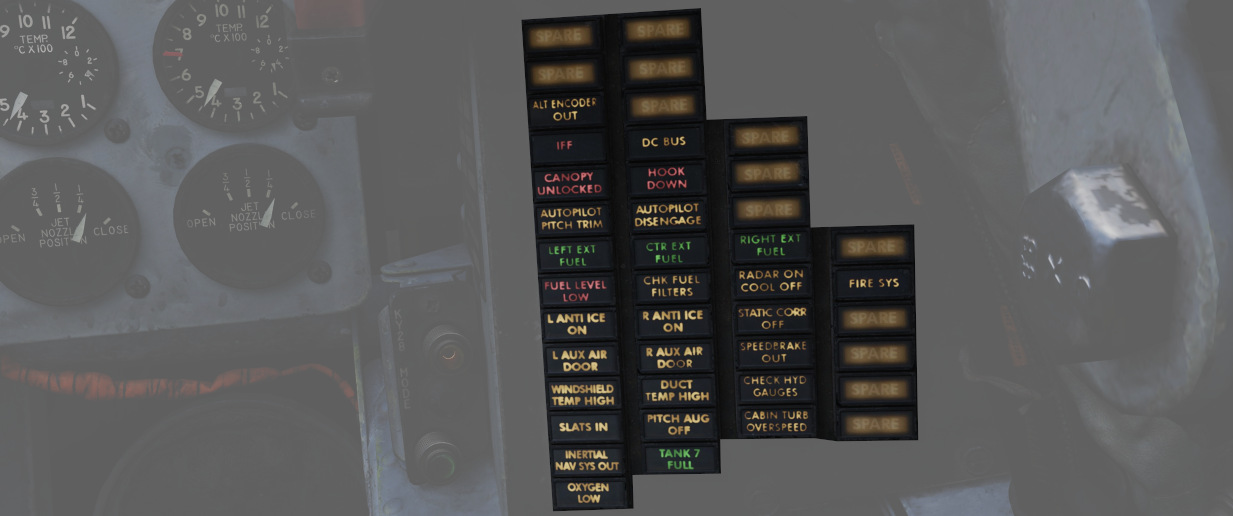
Предоставляет большинство предупреждений о системах самолёта, которые могут быть исправлены пилотом. Большинство предупреждений на панели вызывают включение индикатора главного предупреждения; те, которые этого не делают, будут отмечены.
| Индикатор | Описание | Индикатор | Описание | Индикатор | Описание |
|---|---|---|---|---|---|
| Alt Encoder out | Индикатор загорится, если сигнал от блока кодирования высоты ненадёжен или отсутствует. Он также может загораться на короткое время во время набора высоты с большой скоростью, манёвров пикирования или во время трансзвукового полёта. | ||||
| IFF | Индикатор загорится, когда код режима 4 обнулён или код не введён. | DC Bus | Индикатор загорится, если оба генератора выйдут из строя или произойдёт падение напряжения между основной шиной постоянного тока и аварийной шиной постоянного тока. | ||
| Canopy Unlocked | Индикатор загорится в передней кабине, если какой-либо фонарь не зафиксирован и не опущен. Задний индикатор загорится, только если задний фонарь не полностью зафиксирован и не опущен. | Hook down | Индикатор загорится, если тормозной крюк не поднят и не зафиксирован. | ||
| Autopilot Pitch Trim | Индикатор загорится, когда AFCS включён, а автоматическое отслеживание триммера тангажа не работает или значительно отстаёт от манёвров самолёта. | Autopilot Disengage | Индикатор загорится, когда автопилот будет отключен после первоначального включения AFCS. | ||
| Left Ext Fuel | Индикатор загорится, если выбран левый внешний топливный бак, но поток топлива не обнаружен. | CTR Ext Fuel | Индикатор загорится, если выбран центральный внешний топливный бак, но поток топлива не обнаружен. | Right Ext Fuel | Индикатор загорится, если выбран правый внешний топливный бак, но поток топлива не обнаружен. |
| Fuel Level Low | Индикатор загорится, когда уровень топлива в баках 1 и 2 достигнет заданного уровня топлива 1650 ± 200 фунтов. | CHK Fuel Filters | TИндикатор загорится, когда топливный фильтр засорится. Фильтр автоматически открывается в обход, обеспечивая нормальный поток топлива к двигателю. | Radar On Cool Off | |
| L Anti Ice On | Индикатор загорится, когда система отбора воздуха для противообледенения включена. | R Anti Ice On | Индикатор загорится, когда система отбора воздуха для противообледенения включена. | Static Corr Off | Индикатор загорится, если SPC выйдет из строя или переключатель CADC будет установлен в положение CORR OFF. |
| L Aux Air Door | Индикатор загорится, когда левая вспомогательная воздушная заслонка будет работать не синхронно с рычагом шасси. | R Aux Air Door | Индикатор загорится, когда правая вспомогательная воздушная заслонка будет работать не синхронно с рычагом шасси. | Speedbrake out | Индикатор загорится, если воздушный тормоз выпущен или не полностью закрыт. |
| Windshield Temp High | Индикатор загорится, когда лобовое стекло достигнет температуры, которая вызовет оптические искажения при использовании системы удаления дождя с лобового стекла. Систему удаления дождя с лобового стекла следует немедленно выключить. | Duct Temp High | Индикатор загорится, когда температура внутри воздухозаборника двигателя превысит допустимые пределы. | Check Hyd Gauges | Индикатор загорится, если давление в любой системе упадёт ниже 1500 ± 100 фунтов на квадратный дюйм. |
| Slats In | Индикатор загорится, если переключатель отключения предкрылков будет установлен в положение IN, что приведёт к остановке движения предкрылков в зависимости от угла атаки. | Pitch Aug Off | Индикатор загорится, когда питание самолёта включено, а переключатель стабилизации тангажа не включён. | Cabin Turb Overspeed | Индикатор загорится, если турбина кабины холодильной установки подвергнется давлению и температуре, превышающим нормальные рабочие значения. |
| Inertial Nav Sys Out | Индикатор загорится, если инерциальная навигационная система выйдет из строя или будет отключена. | Tank 7 Fuel | Индикатор загорится, если топливный перекачивающий клапан бака 7 не откроется. | ||
| Oxygen Low | Индикатор загорится, когда количество кислорода станет меньше 1 литра. | Fire Sys | Индикатор загорается, когда либо перегорает сенсорная трубка детектора пожара/перегрева, либо провод детектора перетирается до замыкания на массу, либо выходит из строя блок управления. |
Автоматические выключатели освещения
Справа от панели сигнальных ламп, за пучком кабелей, находятся два автоматических выключателя освещения.
Верхний (
Right Console

Правая консоль дополнительно разделена на 4 секции.
| Section | Name |
|---|---|
| 1. | Передняя |
| 2. | Центральная |
| 3. | Задняя |
| 4. | Стенка |
Передняя секция
Передняя секция правой консоли в основном занята органами управления связью и навигацией.
Кнопка сброса главного предупреждения

Используется для гашения предупреждений на панели сигнальных ламп и индикатора главного предупреждения после принятия необходимых мер. В случае, если неисправность не была эффективно устранена, нажатие кнопки сброса главного предупреждения не отключит соответствующее предупреждение.
Панель управления TACAN

Панель управления TACAN используется для ввода желаемого канала TACAN , режима и громкости звука для мониторинга этого канала экипажем. Панель продублирована в обеих кабинах, а панель, управляющая приёмником TACAN, переключается кнопкой NAV CMD панели управления связью.
Ручки настройки канала
На панели управления есть две ручки управления навигационным каналом (7, 4 и 3), причём левая (
Кнопка и индикатор тестирования
Между этими двумя ручками находится кнопка TEST (
Индикатор над кнопкой загорается, чтобы указать на состояние теста.
Дополнительную информацию см. в главе 7.19.4 Тестирование навигации.
Ручка регулировки громкости
В правом верхнем углу находится ручка VOL (
Селектор функций
Ручка выбора функции TACAN (
| Название | Описание |
|---|---|
| OFF | Приёмник TACAN обесточен и отключён. |
| REC | Приёмник TACAN активен, предоставляя информацию о пеленге на HSI, BDHI, и ADI. |
| T/R | Обе функции приёма и передачи TACAN активны, что обеспечивает информацию о пеленге и дальности в морских милях для HSI и BDHI. |
| A/A REC | Приёмник TACAN декодирует информацию о пеленге с совместимых самолётов для отображения на HSI, BDHI, и ADI. |
| A/A TR | Приёмник TACAN получает информацию как о пеленге, так и о наклонной дальности в морских милях от передающего самолёта, предоставляя её на HSI и BDHI. |
💡 Для работы функции TACAN "воздух-воздух" необходимо установить канал на 63 канала выше или ниже канала взаимодействующего самолёта, но в том же диапазоне - X или Y. Так, заправщик на канале 123Y должен быть установлен на канале 60Y на F-4.
Панель управления связью
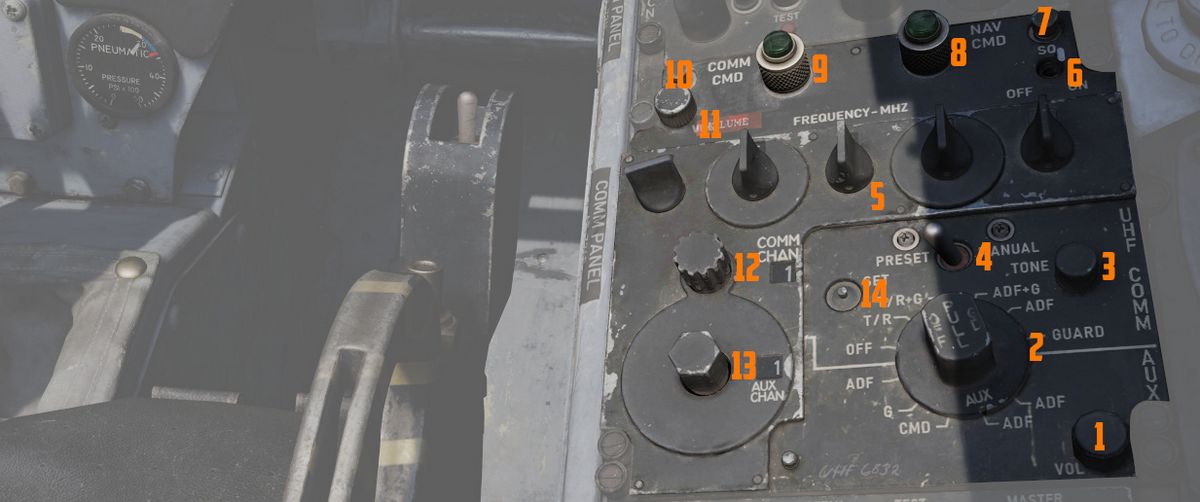
Панель управления связью обеспечивает выбор и режим работы радиостанции UHF в самолёте.
Командные кнопки
Панель продублирована в обеих кабинах, а управление радиостанцией осуществляется нажатием кнопки COMM CMD (
Громкость радио
Под кнопкой COMM CMD находится регулятор громкости радио (
Переключатель шумоподавления
Рядом с кнопкой NAV CMD находится переключатель шумоподавления (
Частота и каналы
Ручка выбора A-3-2-T (
💡 Из-за ограничений движка режимы A и T, относящиеся к функции HAVE-Quick, не моделируются.
Четыре ручки выбора частоты работают совместно с ручкой A-3-2-T и переключателем Preset/Manual. Частоты вводятся, начиная с выбора 3 или 2 на селекторе A-3-2-T, и могут быть введены от 225,00 до 399,975 МГц с шагом 0,025. Когда переключатель Preset/Manual находится в положении Manual, радиостанция UHF напрямую настраивается на отображаемый канал. В положении Preset установленные каналы можно ввести в память COMM CHAN, выбрав желаемое положение с помощью ручки управления каналом связи - меньшей ручки слева от переключателя Preset/Manual, и отобразить в окне COMM CHAN. Каналы сохраняются в отображаемом предустановленном канале с помощью кнопки SET. После сохранения каналы выбираются напрямую с помощью ручки управления каналом связи при установке переключателя Preset/Manual в положение Preset.
Прямо под ручкой управления каналом связи находится ручка (
Ручка регулировки громкости Aux (
Кнопку Set (
Кнопка тона
Кнопка Tone (
💡 Из-за ограничений движка кнопка тона, относящаяся к функции HAVE-Quick, не моделируется.
Селектор функций связи
Ручка выбора функции связи (
| Название | Описание |
|---|---|
| OFF | Все радиостанции UHF выключены. |
| T/R ADF | Приёмник связи - приём связи. |
| Передатчик связи - передача связи. | |
| Защищённый приёмник - ожидание. | |
| Вспомогательный приёмник - приём ADF. | |
| T/R+G ADF | Приёмник связи - приём связи. |
| Передатчик связи - передача связи. | |
| Защищённый приёмник - защищённый приём. | |
| Вспомогательный приёмник - приём ADF. | |
| ADF+G CMD | Приёмник связи - приём ADF. |
| Передатчик связи - передача связи. ADF прерывается во время передачи. | |
| Защищённый приёмник - защищённый приём на антенне ADF. | |
| Вспомогательный приёмник - приём связи. | |
| ADF+G | Приёмник связи - приём ADF. |
| Передатчик связи - передача связи. ADF прерывается во время передачи. | |
| Защищённый приёмник - ожидание. | |
| Вспомогательный приёмник - защищённый приём. | |
| Guard ADF | Приёмник связи - защищённый приём. |
| Передатчик связи - защищённая передача. | |
| Защищённый приёмник - ожидание. | |
| Вспомогательный приёмник - приём ADF. |
Вспомогательная панель (правая)

Вспомогательная панель имеет ручку аварийного выпуска воздуха для сброса избыточного давления в кабине. Кроме того, на ней расположены рычаг обогрева/обдува ног, а также переключатели управления генератором.
Кнопка сброса охлаждения

Сбрасывает систему охлаждения CNI.
Давление в кабине

Индикатор высоты кабины
Отображает текущее давление внутри кабины как эквивалентную эффективную высоту кабины над средним уровнем моря в тысячах футов.
То есть, если прибор (
Чтобы предотвратить недомогание и гипоксию, следует следить за давлением и соответствующим образом регулировать подачу кислорода:
| Диапазон давления | Описание |
|---|---|
| ниже 13 000 футов | Дышите обычным воздухом |
| 13 000 футов - 40 000 футов | Дышите кислородом через маску |
| 40 000 футов - 62 000 футов | Дышите кислородом под давлением через маску |
| выше 62 000 футов | Необходимо носить высотный костюм (недоступен) |
Дополнительную информацию см. в главе Кислород.
Ручка аварийного выпуска воздуха

Заглушка (
Без наддува эффективная высота кабины будет идентична текущей высоте. Что, если лететь на больших высотах, может привести к гипоксии.
Следует использовать только в том случае, если система наддува неисправна и показывает ненормальные значения, или для удаления дыма и паров из кабины. Перед активацией снизьтесь до безопасной высоты.
Рычаг обогрева/обдува ног

Рычаг обогрева/обдува ног (
Возможно, что при выборе настроек холодной температуры, особенно во влажные дни, система кондиционирования воздуха будет подавать воздух с температурой значительно ниже точки росы, что приведёт к запотеванию кабины. Этот туман можно рассеять, выбрав немного более высокую температуру.
При работе в условиях высокой влажности рекомендуется выбирать температуру выше нормальной перед началом разбега, чтобы исключить возможность запотевания кабины при увеличении тяги. Если кабина запотела, самый быстрый способ устранить это состояние - активировать ручку аварийного выпуска воздуха.
Во время крейсерского полёта перед снижением установите ручку регулировки температуры в положение 2 часа и рычаг обогрева/обдува ног на обдув, чтобы повысить температуру обдува для предварительного нагрева лобового стекла и фонаря. Для самолётов без предкрылков, если закрылки опущены для снижения, а запотевание сохраняется, уберите закрылки или увеличьте мощность (используйте воздушные тормоза по мере необходимости для поддержания воздушной скорости), чтобы обеспечить более высокий поток воздуха для обдува.
Переключатель удаления дождя
Если двухпозиционный переключатель (
Систему не следует использовать в сухих условиях, так как горячий воздух будет нагревать лобовое стекло. Если стекло достигнет критической температуры, на панели сигнальных ламп загорится предупреждение WINDSHIELD TEMP HI. В этом случае переключатель следует немедленно выключить.
Переключатель обогрева ПВД
При включённом переключателе обогрева ПВД (
При нормальной эксплуатации его следует всегда включать перед взлётом. Но не оставляйте включённым на земле более одной минуты, чтобы предотвратить повреждение из-за перегрева.
Подробнее см. 3.1.1 Система ПВД.
Переключатели управления генератором

2 двухпозиционных переключателя (
| Name | Description |
|---|---|
| ON | Генератор приводится в движение блоком постоянной скорости и подключён к электрической шине. |
| OFF | Генератор отключён. |
| ON (EXTERNAL) | Внешнее питание подаётся через соединение шины генератора для нужд перед запуском. |
Дополнительную информацию см. в главе 3.8 Электрика.
Центральная секция
Центральная часть правой консоли содержит органы управления системой опознавания «свой-чужой» и освещением.
Панель управления системой опознавания «свой-чужой»

В отличие от панели запроса в кабине WSO, эта панель предоставляет пилоту возможность настроить ответчик системы опознавания «свой-чужой» собственного самолёта. Который затем будет приниматься запросчиками на других самолётах.
💡 Из-за ограничений движка настройки на панели не влияют на DCS. Однако они доступны для внешних инструментов, таких как SRS.
Дополнительную информацию см. в главе Органы управления системой опознавания «свой-чужой».
Главный переключатель
Главный переключатель (
| Положение | Операция |
|---|---|
| Off | Система опознавания обесточена. |
| STBY | На систему подаётся полная мощность, но запросы блокируются. |
| LOW | Система работает с пониженной чувствительностью. |
| NORM | Система работает с полной чувствительностью. |
| EMER | Позволяет системе отвечать на запросы в режимах 1, 2 и 3/A. Ответ для режимов 1 и 2 - это специальный аварийный сигнал выбранных на соответствующих циферблатах кодов, а ответы режима 3/A - это специальные аварийные сигналы кода 7700. |
Переключатель выбора режима 1
Трёхпозиционный переключатель выбора режима 1 (
| Положение | Операция |
|---|---|
| M-1 | Положение самотестирования (не работает) |
| ON | Включает режим 1 для работы. |
| Out | Отключает режим 1 |
Переключатель выбора режима 2
Трёхпозиционный переключатель выбора режима 2 (
| Положение | Операция |
|---|---|
| M-2 | Положение самотестирования. Индикатор загорается, если режим работает правильно. |
| ON | Включает режим 2 для работы. |
| Out | Отключает режим 2. |
Переключатель выбора режима 3/A
Трёхпозиционный переключатель выбора режима 3/A (
| Положение | Операция |
|---|---|
| M-3/A | Положение самотестирования. Индикатор загорается, если режим работает правильно. |
| ON | Включает режим 3/A для работы. |
| Out | Отключает режим 3/A. |
Переключатель выбора режима C
Трёхпозиционный переключатель выбора режима C (
| Положение | Операция |
|---|---|
| M-C | Положение самотестирования (не работает) |
| ON | Включает режим C для работы. |
| Out | Отключает режим C. |
Селекторы кода режима 1 и режима 3/A
Селектор кода режима 1 (
Переключатель выбора режима 4
Двухпозиционный переключатель выбора режима 4 (
| Положение | Операция |
|---|---|
| ON | Включает режим 4 для работы. |
| Out | Запрещает ответ в режиме 4. Если код режима 4 введён, запрос вызовет кратковременное включение индикатора предупреждения IFF и индикатора главного предупреждения. |
Переключатель индикации режима 4
Переключатель индикации режима 4 (
В положении AUDIO звуковой сигнал указывает на приём запросов режима 4, а индикатор ответа режима 4 загорается во время передачи. В положении LIGHT индикатор ответа режима 4 загорается при передаче ответов режима 4, а звук отсутствует. В положении OUT индикация светом и звуком неактивна.
Чтобы проверить индикатор ответа режима 4, переключатель индикации должен находиться в положении AUDIO или LIGHT.
Переключатель функции режима 4
Переключатель функции режима 4 (
В положении A ответчик отвечает на запросы режима 4 с той же настройкой, что и в положении A, а в положении B он отвечает на запросы с той же настройкой кода, что и в положении B. Если переключатель находится в неправильном положении для запрашиваемого кода (например, в A при запросе B), индикатор предупреждения IFF и индикатор главного предупреждения не активируются.
💡 Настройки кода для положений A и B вводятся перед полётом и могут быть обнулены путём установки переключателя в положение ZERO.
Положение HOLD не используется в полёте, но сохраняет настройку кода, если ожидается ещё один полёт в течение периода действия кода. Кратковременная установка переключателя в положение HOLD после посадки, ожидание 15 секунд, а затем выключение главного переключателя IFF и ручки питания радара сохраняет код при выключенном питании.
Включение индикатора предупреждения IFF и индикатора главного предупреждения может быть вызвано внутренним отказом компонента, отсутствием ответа на действительный запрос или обнулением кода.
Переключатель тестирования мониторинга излучения
Этот переключатель (
Переключатель идентификации местоположения
Переключатель идентификации (
| Положение | Операция |
|---|---|
| IDENT | Позволяет системе отвечать сигналами идентификации местоположения во всех используемых режимах. Ответ продолжается в течение 15-30 секунд после отпускания переключателя. |
| OUT | Отключает функцию идентификации местоположения. |
| MIC | То же, что и установка переключателя в положение IDENT, за исключением того, что для запуска идентификации необходимо использовать кнопку микрофона UHF. |
Панель управления-мониторинга боеприпасов DCU-94A

Эта панель используется для управления и тестирования отдельной системы цепей сброса ядерных боеприпасов.
Ядерные боеприпасы отделены от обычной системы сброса, чтобы предотвратить случайный сброс.
💡 Это не моделируется в игре.
Регулятор температуры

Ручку (
Если система AUTO выйдет из строя, переключатель можно установить в любой из ручных режимов.
Центральное положение переключателя выключает систему.
Панель управления освещением кабины

Панель управления освещением кабины обеспечивает управление всей подсветкой панели, освещением панели пилотажных приборов, прожекторами консоли, белыми прожекторами, расположенными под бортом фонаря над каждой консолью, а также включает в себя переключатель тестирования сигнальных ламп/подсветки резервного компаса.
Дополнительную информацию об освещении см. в главе Освещение.
Белый прожектор
Переключатель белого прожектора (
Ручка панели приборов
Эта ручка (
💡 Основные пилотажные приборы управляются с помощью ручки яркости пилотажных приборов.
Ручка консоли
Ручка регулировки яркости консоли (
Прожектор консоли
Этот переключатель (
💡 Чтобы выключить их, установите переключатель в положение DIM, а ручку консоли в положение OFF.
💡 Прожекторы для панели приборов находятся на правой стенке.
Переключатель тестирования сигнальных ламп
Переключатель тестирования сигнальных ламп (
В положении STBY COMP он включает подсветку резервного компаса.
Обе функции отключаются, когда переключатель установлен в положение OFF.
Задняя секция
В задней части правой консоли находятся навигационное оборудование и органы управления внешним освещением.
Панель управления компасом

Управляет основными органами управления для правильной работы системы азимута AJB-7. Необходима для точного вывода азимута на такие приборы, как ADI, HSI, BDHI, а также на авиагоризонт, заднего сиденья, автопилот, и бомбовый компьютер.
Ручка выбора режима
Переключает (
| Название | Описание |
|---|---|
| COMP (Compass) | Используется в аварийных ситуациях, когда системы отсчёта выходят из строя. Подаёт магнитный курс непосредственно с индукционного датчика. |
| DG (Directional Gyro) | Используется в высоких широтах и регионах с магнитными искажениями, начальный магнитный курс требует ручной настройки. Если система отсчёта установлена в положение STBY, широту самолёта необходимо отрегулировать с помощью ручки широты. |
| Slaved | Основной режим работы в обычных условиях, он зависит от сигналов индукционного датчика для постепенной синхронизации системы. |
| SYNC | Подпружинен, чтобы вернуться в положение SLAVED, обеспечивает быструю синхронизацию между индукционным датчиком компаса и системой отсчёта азимута. |
Переключатель полушария и ручка управления широтой
Регулируется для установки полушария и широты самолёта в режиме DG Compass System при работе с резервной системой отсчёта. Полушарие определяется вращением винта (
Ручка управления установкой курса
Ручка с нажатием для поворота (
Индикатор синхронизации
Отображает (
Панель управления внешним освещением

Эта панель содержит органы управления, подключённые к большей части внешнего освещения:
- 3 габаритных огня (зелёный, красный, белый)
- 2 посадочных огня на законцовках крыльев (зелёный, красный)
- 3 фюзеляжных огня (белые)
- Противобликовый хвостовой огонь с 2 лампами (красный)
Три переключателя с надписями Fuselage, Tail и Wing регулируют яркость освещения между BRT (ярко), DIM и OFF.
Чтобы обеспечить доступность освещения даже в случае сбоя питания, выбор BRT и DIM осуществляется через разные шины:
| Лампа | Шина |
|---|---|
| Яркая | Правая основная шина постоянного тока 28 В |
| Тусклая | Левая основная шина переменного тока 14 В |
| Anti-Col 1 | Правая основная шина переменного тока 14 В |
| Anti-Col 2 | Левая основная шина переменного тока 14 В |
Дополнительную информацию об освещении см. в главе 3.9 Освещение.
Переключатель фюзеляжного освещения
Трёхпозиционный переключатель (
Кроме того, если он установлен в положение BRT, а переключатель мигания установлен в положение FLASH, загораются оба противобликовых огня.
Переключатель хвостового освещения
Трёхпозиционный переключатель (
Переключатель освещения крыльев
Трёхпозиционный переключатель (
Переключатель мигания
Трёхпозиционный переключатель (
- Одной из двух противобликовых ламп
- Хвостового габаритного огня
- Фюзеляжных огней
Если он установлен в положение OFF, управляемые огни выключены независимо от положения их соответствующих переключателей. В положении STEADY они загораются в соответствии с выбранной яркостью. Положение FLASH заставляет управляемые огни переключаться с установленной яркости на низкую яркость и обратно.
Бортовой видеомагнитофон

Система AVTR установлена в задней части справа от кресла. Она в основном управляется WSO и записывает звук внутренней связи, а также изображение заднего радиолокационного индикатора.
Видеоматериал записывается на стандартную кассету u-matic S, которую можно извлечь и заменить с помощью кнопки EJECT (
Кассета может записывать до 20 минут, что отображается на маленьком дисплее с надписью ELAPSED TIME (
Подробнее о том, как получить доступ к видеоматериалу, см. 9.6 Регистраторы DCS.
💡 Наша симуляция AVTR также работает как музыкальный проигрыватель, подробнее см. Кассетный проигрыватель.
Правая стенка
Правая стенка содержит основные автоматические выключатели и органы управления освещением.
Ручка ручного разблокирования фонаря

Ручка ручного разблокирования используется в случае отказа пневматической системы.
Ручка при оттягивании назад разблокирует фонарь, чтобы его можно было открыть. Перед ручной разблокировкой фонаря обычный рычаг управления должен быть установлен в положение OPEN.
При нормальной эксплуатации ручка должна оставаться в переднем положении.
Если фонарь не зафиксирован должным образом, на панели сигнальных ламп загорится предупреждение CANOPY UNLOCKED.
Панель регулировки яркости пилотажных приборов

Панель регулировки яркости пилотажных приборов имеет шесть ручек, которые позволяют независимо изменять интенсивность освещения следующих индикаторов для обеих кабин:
- Индикатор воздушной скорости/числа Маха (
2 ) - Авиагоризонт (
4 ) - Индикатор угла атаки (
1 ) - Вариометр ((
5 )) - Высотомер (
6 ) - Курсовая система (
3 )
Базовая интенсивность всех индикаторов регулируется с помощью ручки яркости пилотажных приборов.
🚧 Эти ручки будут доступны позже во время раннего доступа.
Панель управления посадочными огнями и индикаторами

Управление посадочными огнями, которые расположены на законцовках крыльев, по обеим сторонам вертикального стабилизатора, а также вдоль фюзеляжа в передней и средней части, осуществляется с помощью трёхпозиционного переключателя (
Также на этой панели находится ручка яркости индикаторов (
Под крышкой предохранителя (
Дополнительную информацию об освещении см. в главе 3.9 Освещение.
Панель автоматических выключателей

Содержит семь автоматических выключателей, отвечающих за рулевые поверхности и другие системы, важные для безопасной эксплуатации самолёта.
- Механизм триммерного эффекта элеронов (
1 ) - Механизм триммерного эффекта стабилизатора (
2 ) - Воздушный тормоз (
3 ) - Шасси (
4 ) - Закрылки (
5 ) - Органы управления триммированием (
6 ) - Триммер руля направления (
7 )
Если автоматический выключатель сработал, соответствующая система не получает питание и больше не может работать.
Панель аварийного освещения

Эта вспомогательная панель имеет различные органы управления освещением, а также звуком.
Предупреждение о сваливании
Ручка предупреждения о сваливании (
В определённых условиях система может переопределить громкость, чтобы гарантировать, что сигнал всегда слышен в опасных ситуациях.
Резервный Искусственный Горизонт
Эта ручка (
Подсветка приборов
Трёхпозиционный переключатель (
Дополнительную информацию об освещении см. в главе 3.9 Освещение.
Звук предупрепреждения о пуске
Эта ручка (
РУС и кресло
РУС

РУС предусмотрен в обеих кабинах, с почти одинаковым расположением переключателей.
РУС можно скрыть, щёлкнув по его основанию.
Триммер
Триммер (
Спусковой крючок и кнопка сброса бомбы
Оружие можно применять как с помощью спускового крючка (
Первое положение спускового крючка активирует фотопулемёт для записи видео вперёд.
Кнопка сброса дозаправки топливом в воздухе
Уникальной особенностью РУС передней кабины является кнопка сброса дозаправки топливом в воздухе (ARR)
(
Подробнее см. 3.2.2. Топливная система.
Кнопка управления носовой стойкой шасси
На обоих РУСах есть кнопка управления носовой стойкой шасси (NWS или также NGS) (
Удержание кнопки нажатой позволяет члену экипажа управлять самолётом с помощью педалей руля направления. Подробнее см. раздел 3.1.3 Шасси и управление на земле, Управление носовой стойкой шасси.
Рычаг аварийного быстрого сброса
На каждом РУСе есть рычаг аварийного быстрого сброса (
Подробнее см. раздел 3.1.3 Шасси и управление на земле, Противоскользящая система/
Кресло

Кресло позволяет экипажу катапультироваться из самолёта, потянув за шнур между ног или над головой.
Подробнее о кресле и механизме катапультирования см. в разделе 3.13 Аварийная система..
Рычаг тормозного парашюта
Кроме того, на левой стороне имеется рычаг для управления тормозным парашютом.
Парашют применяется для сокращения пробега при посадке или в качестве вспомогательного средства при выводе из штопора, рычаг тормозного парашюта тянется назад для выпуска парашюта, и, как только он выпущен, кнопка на рычаге нажимается, при этом рычаг тянется ещё дальше назад, чтобы отсоединить парашют.
После отсоединения рычаг возвращается в своё нормальное положение.
Подробнее см. раздел 3.1.3 Шасси и управление на земле, Система тормозного парашюта..
Регулировка положения кресла

Вертикальное положение кресла можно изменить в любом направлении примерно на 5 см с помощью этого подпружиненного переключателя на правой стороне кресла.
Для посадки рекомендуется установить кресло в самое верхнее положение для лучшей видимости.
Работа двигателя должна быть ограничена 30 секундами в течение 10 минут, чтобы предотвратить его перегрев и поломку.
Обзор кабины WSO
Компоновка

| Секция | Название |
|---|---|
| 1. | Индикаторы спереди |
| 2. | Левая вспомогательная панель |
| 3. | Левая консоль |
| 4. | Группа на пьедестале |
| 5. | Правая вспомогательная панель |
| 6. | Правая консоль |
| 7. | РУС и кресло |
Индикаторы спереди
Передняя часть фонаря предоставляет WSO все необходимые пилотажные приборы и индикаторы.
Резервный магнитный компас
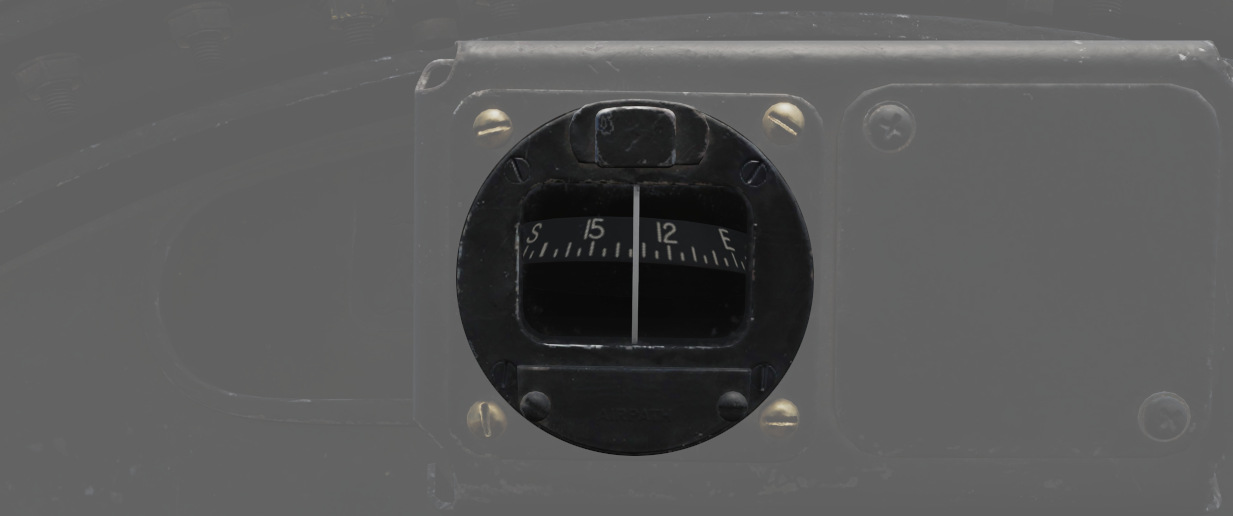
Стандартный магнитный компас для резервного навигационного сопровождения в случае отказа основных систем директорного управления.
Компас следует использовать только в горизонтальном полёте. Карты девиации компаса находятся над правым бортом фонаря в каждой кабине.
Ручка выбора командного катапультирования

Используется для выбора одиночного или двойного катапультирования по команде WSO. В вертикальном положении (клапан закрыт) инициирование катапультирования WSO катапультирует только заднее сиденье. Когда ручка клапана находится в горизонтальном положении (открыто), WSO, инициирующий катапультирование, извлекает обоих членов экипажа.
Индикатор курса

Используется во время захода на посадку по ILS , отображает отклонения от локализатора и глиссады в виде точек (
Указатель курса (
Не работает с TACAN или VOR. Флажки OFF отображаются при потере сигнала.
Индикатор курсового радиомаяка
Лампа в правом верхнем углу (
Лампу можно вращать для регулировки яркости и нажимать для тестирования.
Подробнее см. Система VOR/ILS.
Индикатор режима KY-28

Двухламповый индикатор, показывающий текущий режим работы KY-28 (
💡 Для связи UHF требуется, чтобы система находилась в режиме Plain, даже при выключенном питании системы, за исключением использования и мониторинга защищённого канала.
Индикатор главного предупреждения

Повторитель индикатора главного предупреждения передней кабины, предупреждает WSO о том, что существует предупреждающее состояние, и необходимо проверить панель сигнальных ламп, чтобы определить причину и исправить ситуацию..
💡 Для WSO нет отдельной кнопки сброса. Пилот должен сбросить главное предупреждение, если оно возникает.
Индикатор SHOOT

Загорается при выполнении параметров запуска ракеты. Не загорается в режимах визуального перехвата (VI) или "воздух-земля".
Азимутальный индикатор RWR

Азимутальный индикатор приёмника радиолокационного предупреждения показывает все источники радара, видимые для приёмника радиолокационного предупреждения. Ручка в левом нижнем углу регулирует яркость дисплея.
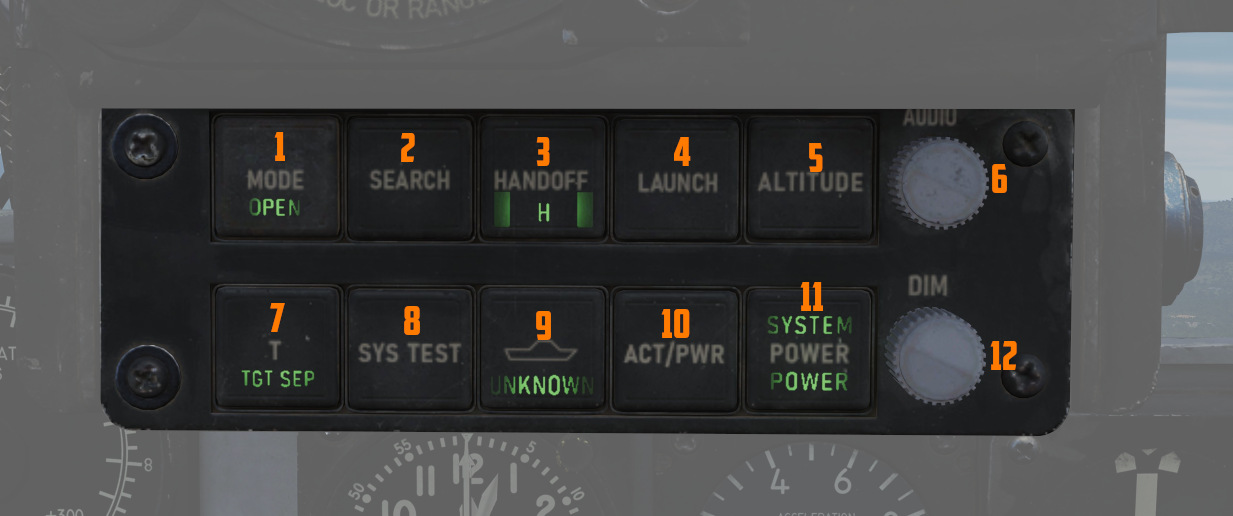
Слева от него находится блок с несколькими ручками для управления системой.
Дополнительную информацию и описание кнопок см. в главе Приёмник радиолокационного предупреждения.
Переключатель контрастности цели

Используется для выбора соответствующих условий контрастности для захвата цели головкой самонаведенияAGM-65A Maverick и AGM-65B Maverick.
| Название | Описание |
|---|---|
| WHT/BLK | Программирует головку самонаведения ракеты на отслеживание светлой цели на тёмном фоне. |
| AUTO | Программирует ракету на использование автоматического режима слежения. |
| BLK/WHT | Программирует головку самонаведения ракеты на отслеживание тёмной цели на светлом фоне. |
Это не меняет полярность видеосигнала, а меняет кодировку самой головки самонаведения.
Ручка громкости ML
Регулирует громкость системы запуска ракет, которая воспроизводит тоны, чтобы предупредить WSO о том, что он находится под атакой.
Индикаторы угла атаки

Пара индикаторов слева и справа, которые обеспечивают быстрое подтверждение текущего состояния угла атаки самолёта на основе подсвеченного положения и цвета.

Также может указывать на сигналы управления оружием, а звуковая система дублирует индикацию звуковыми сигналами. Подробнее см. Система угла атаки..
💡 Индикаторы угла атаки указывают только при убранном правом шасси.
Индикаторы активности APX-81A
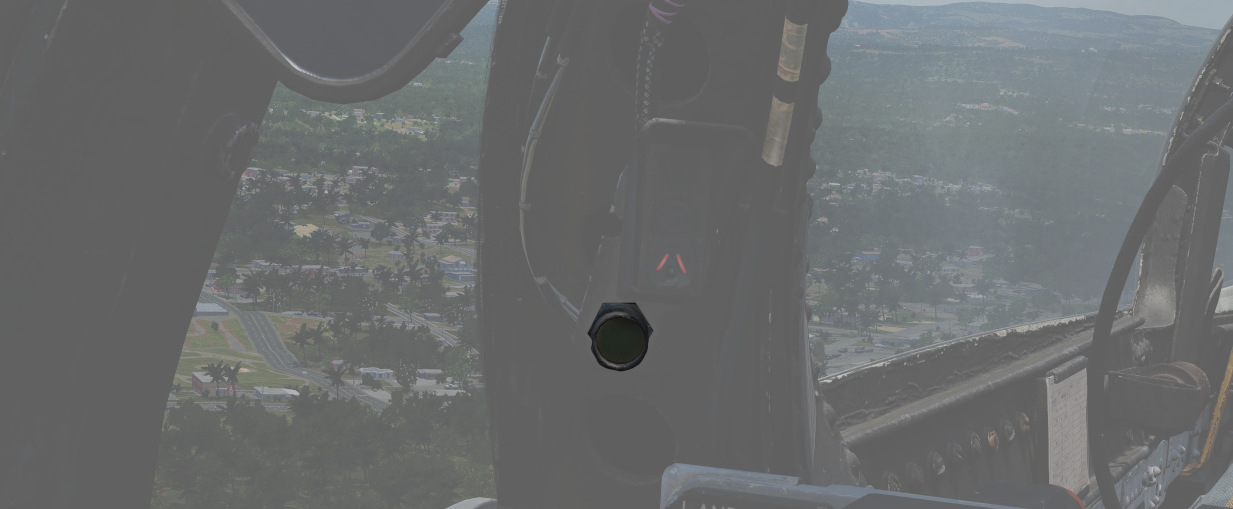
Рядом с каждым индикатором угла атаки находится индикатор, который указывает на активность, обнаруженную системой APX-81A Combat Tree.
Загорается каждый раз, когда система обнаруживает запрос от других самолётов.
💡 Из-за ограничений движка это не моделируется в игре.
Индикатор дальности (VISIDENT)

Отображает точную информацию о радиолокационной дальности в пределах 2 миль (12 000 футов) и информацию о дальности/скорости в пределах 9000 футов, когда захват цели существует в режиме визуального перехвата, B NAR или B WIDE. Когда выбран режим AIR-GRD, индикатор отключается.
Часы с восьмидневным запасом хода

Часы имеют часовую и минутную стрелки, их можно установить, повернув ручку(
Акселерометр

Откалиброван от -4 до +10 в единицах G, с тремя стрелками - одна для текущей приложенной нагрузки, две другие показывают максимальную положительную и отрицательную перегрузку, приложенную во время полёта. Нажатие кнопки PUSH TO SET сбросит индикаторы максимального положения на 1 G.
Указатель поворота

4-минутный указатель поворота, использующий обычный горизонтально установленный гироскоп, точно отображает стандартные скорости поворота, напоминая обычный указатель поворота и скольжения.
Чтобы выполнить контролируемый поворот (360° за 4 минуты), установите вертикальную стрелку над одним из индикаторов с любой стороны (скорость поворота 1,5 градуса в секунду) и убедитесь, что индикатор скольжения внизу отцентрирован, чтобы предотвратить чрезмерный или недостаточный поворот из-за неправильного крена.
Переключатель выбора режима навигации

Выбирает соответствующий режим для двух стрелок BDHI.
| Название | Стрелка 1 | Стрелка 2 |
|---|---|---|
| Вверх | UHF/Автоматическое радиопеленгование | Станция TACAN |
| Центр | Станция VOR | Станция TACAN |
| Вниз | Режим навигационного компьютера: пеленг | Режим навигационного компьютера: путевой угол |
Индикатор путевой скорости

Отображает путевую скорость самолёта в узлах и откалиброван от 0 до 1999 узлов. Требуется INS для точного отображения. Если INS выключен, может показывать любое значение до 150 узлов, когда самолёт неподвижен на земле.
Индикатор истинной воздушной скорости

Отображает истинную воздушную скорость самолёта в узлах и откалиброван от 150 до 1500 узлов; таким образом, воздушные скорости ниже этого диапазона ненадёжны.
Индикатор канала дистанционного управления УВЧ (UHF)

Отображает текущее выбранное значение канала, когда радиостанция настроена на PRESET. В противном случае индикатор отображает M, если радиостанция настроена на Manual, G, когда функция COMM установлена как GUARD/ADF, или A, когда переключатель A-3-2-T находится в положении A.
Вариометр

Отображает скорость набора высоты или снижения с помощью системы статического давления в тысячах футов в минуту.
Высотомер

Высотомер со стрелкой и счётчиком, с тысячами в окне счётчика (
Работает либо в электрическом (нормальный режим работы), либо в пневматическом (STBY) режиме, переключаемом с помощью подпружиненного трёхпозиционного переключателя (
При удержании в положении RESET более 3 секунд система будет сброшена и выведена из режима STBY.
Авиагоризонт

AJB-7 предоставляет информацию об ориентации на авиагоризонт, расположенный на панели приборов задней кабины, независимо от положения переключателя выбора системы отсчёта. Ручка триммера позволяет регулировать сферу ориентации для правильного ориентирования самолёта. Если питание индикатора или AHRS отключено, отобразится флажок OFF.
Индикатор воздушной скорости и числа Маха

Комбинированный индикатор воздушной скорости и числа Маха показывает показания воздушной скорости ниже 200 узлов и включает числа Маха на внешнем кольце на высокой скорости. Индикатор использует одну стрелку над фиксированной шкалой воздушной скорости, отмеченной от 80 до 850 узлов, с подвижной шкалой Маха, отображающей от 0,4 до 2,5 Маха.
Пара подвижных опорных маркеров доступна с помощью ручки (
Стрелка (
Индикатор пеленга, дальности и курса (BDHI)

Индикатор пеленга, дальности и курса (BDHI) отображает навигационную информацию с помощью двух стрелок, называемых указателями № 1 и № 2, которые получают входные данные, управляемые переключателем выбора режима навигации WSO.
Когда верхнее положение выбрано для TACAN/ADF/UHF, указатель № 1 указывает пеленг UHF, а указатель № 2 указывает пеленг TACAN. Если сигнал TACAN отсутствует, оба указателя указывают пеленг ADF.
Когда выбрано среднее положение - VOR/TAC, указатель № 1 указывает пеленг VOR, указатель № 2 указывает пеленг TACAN, а индикатор дальности (3) показывает расстояние до станции TACAN. При отсутствии сигнала TACAN оба указателя указывают на станцию VOR.
В нижнем положении, NAV COMP, указатель № 1 указывает пеленг на координаты цели навигационного компьютера, а указатель № 2 указывает магнитный путевой угол.
Вертикальный индикатор (
Тахометры
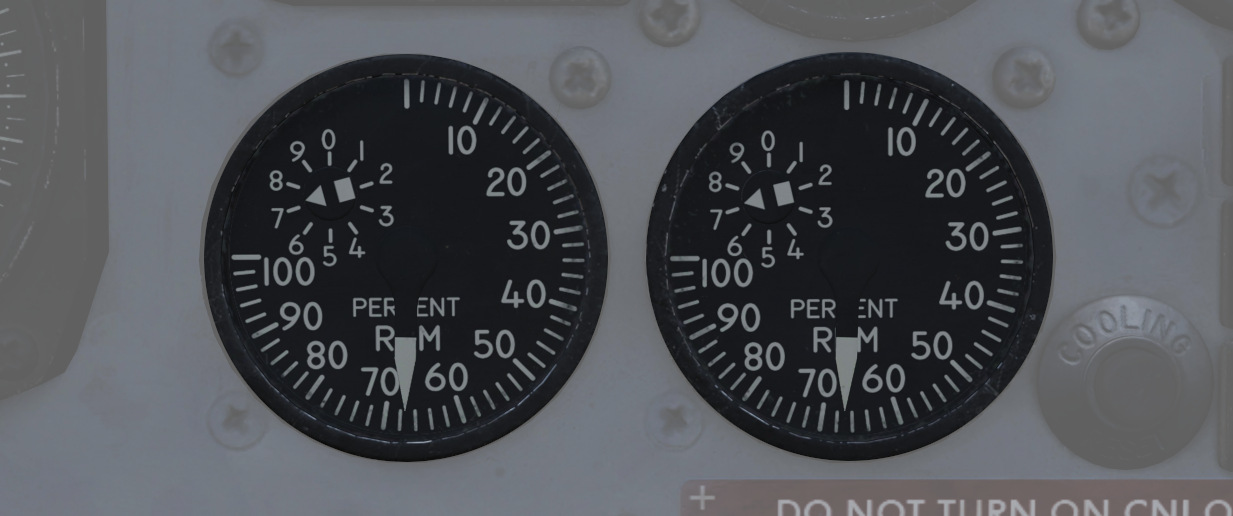
Для каждого двигателя предусмотрен тахометр с процентной шкалой, включающий встроенное колесо для точного отображения однозначных чисел. Нормальные значения: 65% для холостого хода, 95% для полной тяги MIL и 105% для полного форсажа.
Индикатор не зафиксированного фонаря
Загорается, когда фонарь не зафиксирован. Чтобы сбросить индикатор, закройте и зафиксируйте задний фонарь.
Индикатор выхода из строя системы инерциальной навигации
Загорается, когда система INS находится в состоянии отказа. Чтобы сбросить INS, обратитесь к главе 3.3.2 Инерциальная навигационная система.
Индикатор охлаждения радара CNI
Загорается, чтобы указать на перегрев в системе охлаждения авионики, скорее всего, вызванный отказом воздуховода отбора воздуха.
Если индикатор горит, уменьшите воздушную скорость и подождите 15 секунд. Затем нажмите кнопку сброса охлаждения CNI рядом с ним.
Если индикатор продолжает гореть, оставайтесь на пониженной мощности и скорости и приземлитесь как можно скорее.
Кнопка сброса охлаждения
Сбрасывает систему охлаждения CNI.
Левая вспомогательная панель

Левая вспомогательная панель содержит AVTR, фотопулемёт, индикаторы "воздух-воздух" (
Переключатель фотопулемёта

Двухпозиционный переключатель (
Индикатор "воздух-воздух"
Загорается (
Кнопка выбора видеосигнала
Кнопка (
Управление AVTR
Управляет бортовым видеомагнитофоном (AVTR), который записывает звук внутренней связи, а также изображение заднего радиолокационного индикатора.
Дополнительную информацию о системе записи см. в разделе 9.6 Регистратор..
Переключатель AVTR
Когда переключатель (
Таймер ленты AVTR
Кассета может записывать до 20 минут видеоматериала, что отображается на маленьком дисплее (
Индикатор EOT
Когда достигнут конец ленты, загорается индикатор EOT (4, нижняя половина), и ленту необходимо перемотать, прежде чем она сможет снова записывать.
Индикатор RCD
Загорается (
Аварийный рычаг шасси

Выпускает шасси с помощью пары баллонов со сжатым воздухом; рычаг не может убрать шасси, только выпустить в аварийной ситуации.
Рычаг аварийного тормоза
В аварийной ситуации сбрасывает часть гидравлического аккумулятора тормозной системы для обеспечения аварийного торможения. Имеет ограниченное количество применений.
Панель управления APX-80

AN/APX-80 объединяет систему запроса IFF APX-76 и систему Combat-Tree APX-81A. Она используется для определения того, является ли самолёт дружественным или вражеским.
Подробнее см. Системы запроса..
Кнопки кода
Первая цифра на дисплее кода (
Off (белый квадрат)
- Режим 1
- Режим 2
- Режим 3
- Режим 4/A
- Режим 4/B
💡 В DCS эффективен только режим 4 (A или B), и его можно использовать для запроса.
Остальные четыре цифры используются для установки кода IFF для запроса в режимах с 1 по 3.
Кнопки под и над дисплеем используются для уменьшения и увеличения соответствующей настройки соответственно.
Индикатор запроса
Эта лампа с регулируемой яркостью (
Код тестирования/запроса
Переключатель (
TEST используется для тестирования системы. Если лампа над ним загорается, тест пройден успешно.
Anti-Jam
Этот переключатель (
Индикатор тестирования/запроса
Эта лампа с регулируемой яркостью (
Кнопка тестирования
Кнопка запускает встроенный тест системы APX-81A Combat-Tree.
Mode 2
Этот переключатель (
Mode 3
Этот переключатель (
Mode 4
Этот переключатель (
Эта функция никогда не устанавливалась и не подключалась на данном варианте F-4E.
Панель кислородного регулятора WSO
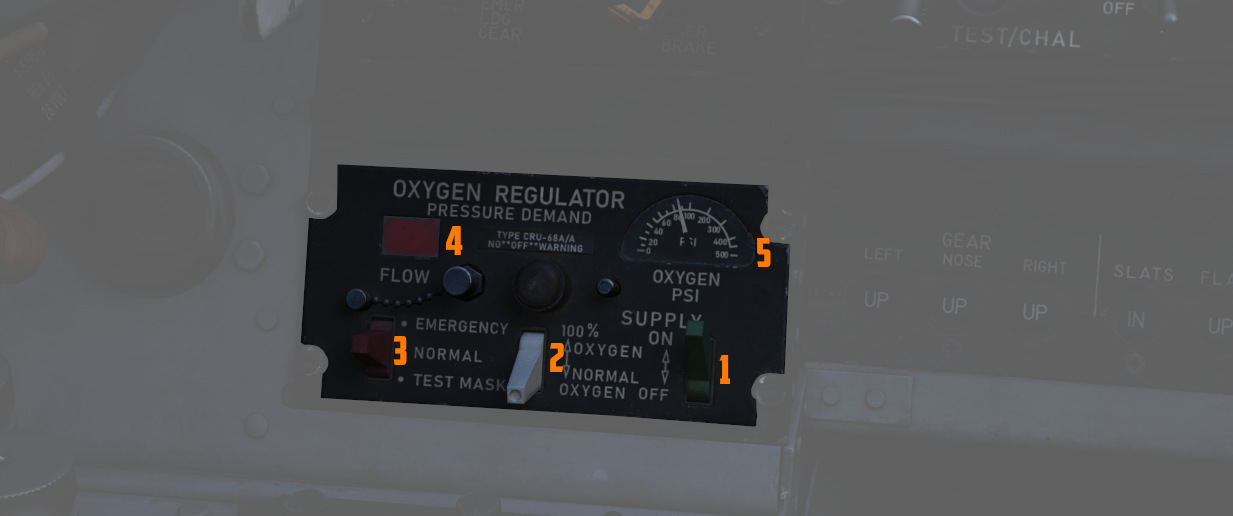
Рычаг подачи
Двухпозиционный переключатель (
Рычаг разбавления
Двухпозиционный рычаг разбавления (
Для пропорционального количества воздуха и кислорода следует выбрать положение NORMAL OXYGEN.
Для чистого кислорода следует выбрать положение 100% OXYGEN. Эта настройка предпочтительна при возникновении пожара, токсичного дыма или паров в кабине.
Переключатель аварийного управления потоком
Трёхпозиционный переключатель (
Аварийный рычаг должен всегда оставаться в центральном положении (NORMAL), если не требуется незапланированное повышение давления.
Индикатор потока
Чередуется (
Манометр кислорода
Показывает (
Для получения дополнительной информации см. главу 3.7 Вспомогательное оборудование, раздел Кислород.
Панель индикаторов шасси/закрылков

Отображает текущее состояние шасси, закрылков и предкрылков.
Шасси
Состояние обозначается словом UP (убрано), изображением диагональных полос (в процессе перехода) или значком колеса (выпущено) в зависимости от текущего положения.
Дополнительную информацию см. в главе 3.1.3 Шасси.
Предкрылки
Состояние обозначается словами IN и OUT.
Закрылки
Состояние обозначается словами UP (закрылки убраны) или DN (выпущены). При переходе может отображаться изображение диагональных полос. При переходе обратно в положение UP индикатор не меняется до тех пор, пока закрылки не будут полностью убраны.
Дополнительную информацию см. в разделе 3.1.2 Органы управления полётом и AFCS, Предкрылки и закрылки.
Левая консоль
Левая консоль дополнительно разделена на 4 секции.
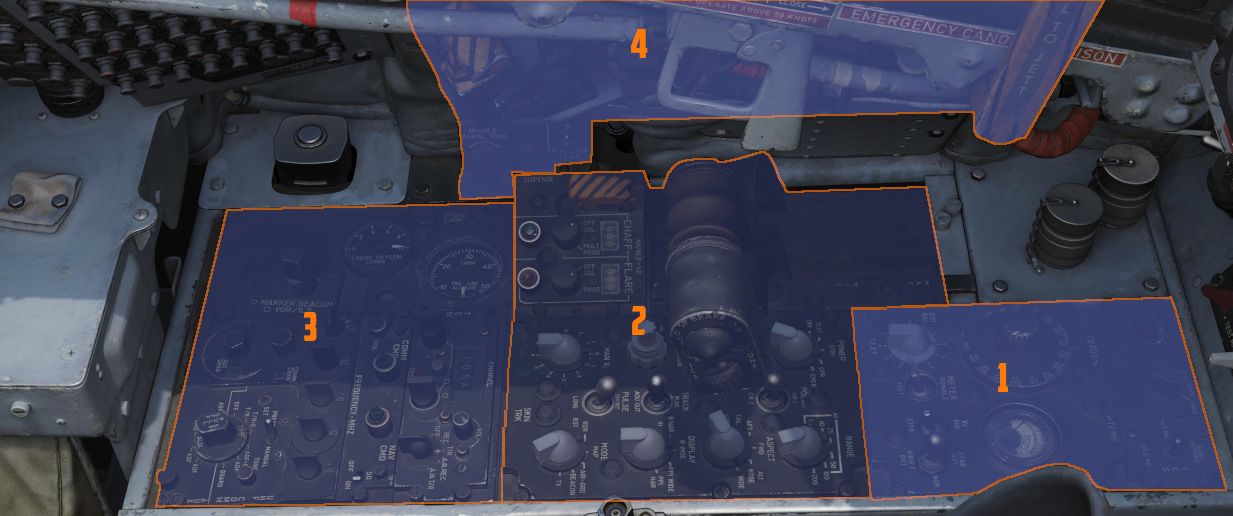
| Секция | Название |
|---|---|
| 1. | Передняя |
| 2. | Центральная |
| 3. | Задняя |
| 4. | Стенка |
Передняя секция
Панель управления внутренней связью
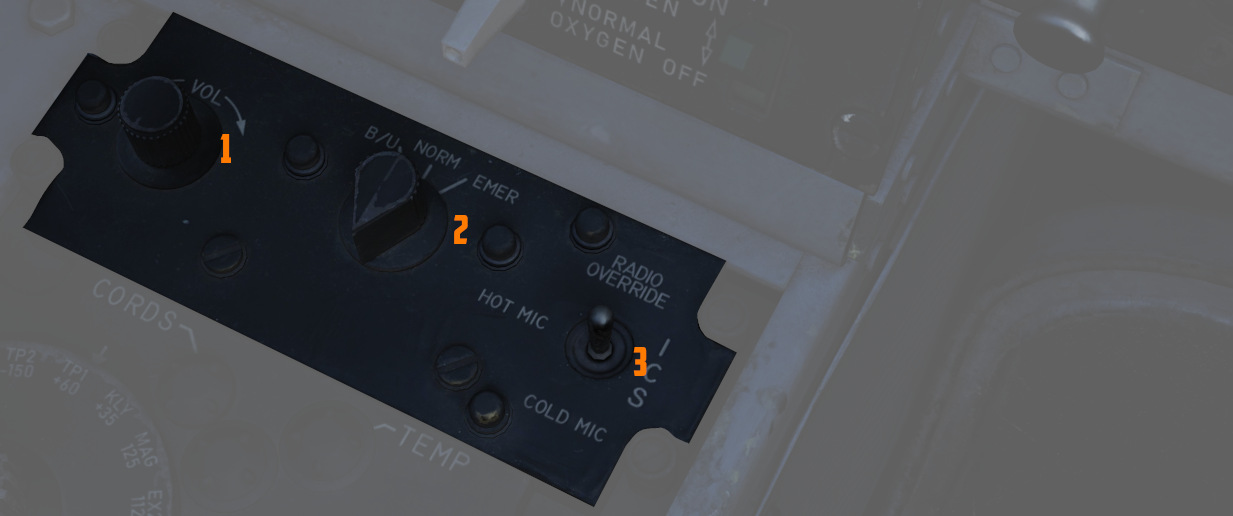
Ручка регулировки громкости
Поворачивается по часовой стрелке (
Переключатель выбора функции
Трёхпозиционный переключатель (
| Название | Описание |
|---|---|
| COLD MIC | Переключатель микрофона на РУД необходимо удерживать, чтобы активировать внутреннюю связь. |
| HOT MIC | Голос автоматически передаётся по внутренней связи. |
| RADIO OVERRIDE | Голос автоматически передаётся по внутренней связи. Громкость всех звуков, кроме тона Shrike и предупреждения о сваливании, уменьшается. |
Ручка выбора усилителя
Определяет текущий усилитель (
| Название | Описание |
|---|---|
| B/U | Резервный усилитель гарнитуры обеспечивает звук. |
| NORM | Основной усилитель гарнитуры обеспечивает звук. |
| EMER | Использует усилитель из противоположной кабины; слышен весь и только звук, включая радио, принимаемое в этой кабине. |
Панель управления-мониторинга

Тестирует и контролирует радар APQ-120.
Индикатор Cords
Не используется на F-4E.
Индикатор температуры
Загорается (
Ручка выбора измерителя
Шестнадцатипозиционная поворотная ручка (
Контрольный измеритель
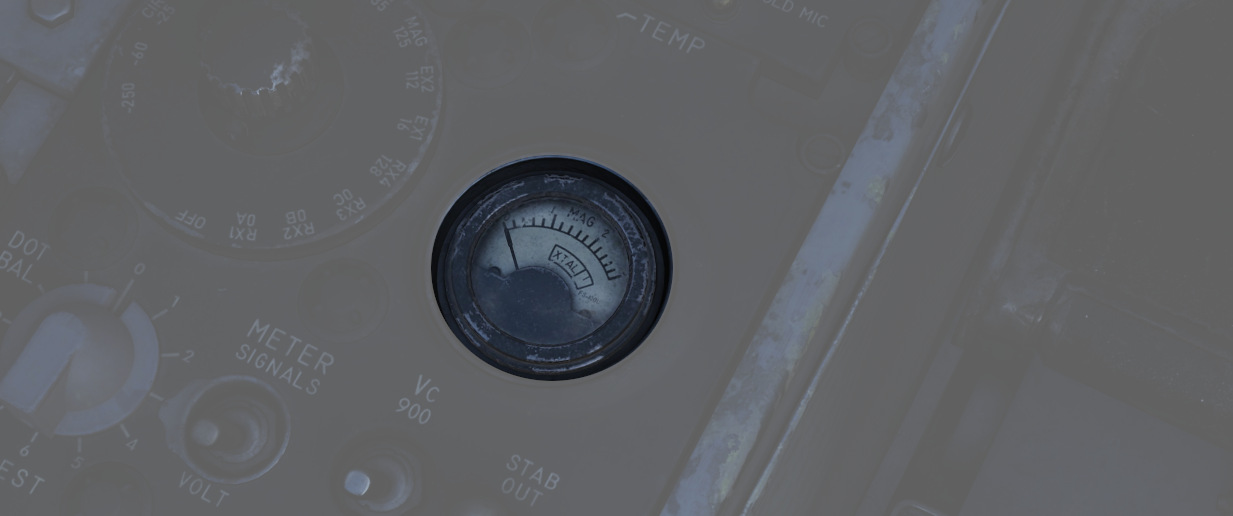
Отображает напряжение, ток и сигналы (
Ручка тестирования
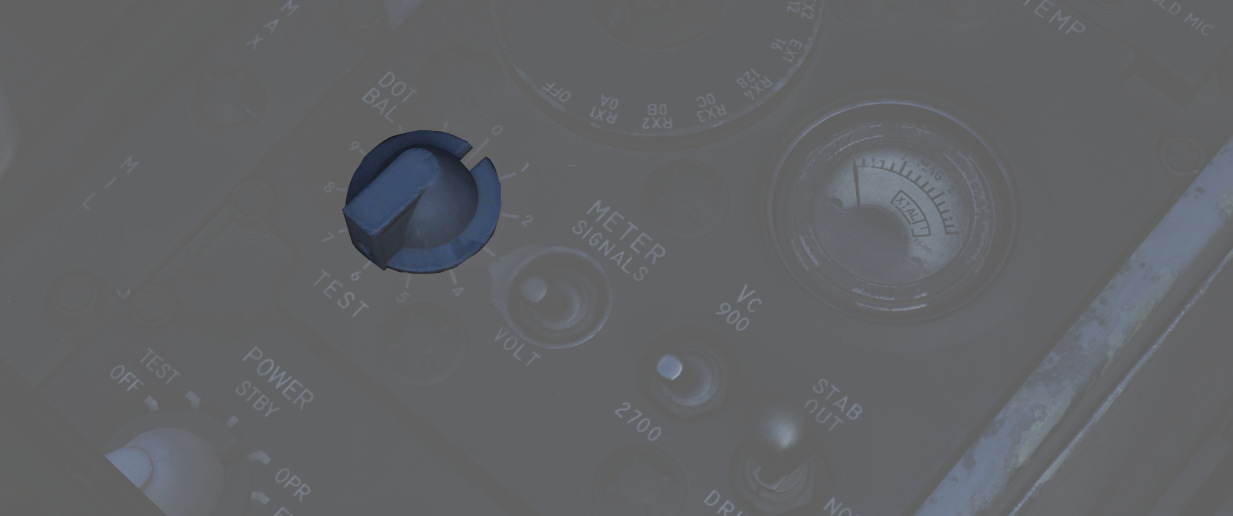
Одиннадцатипозиционная поворотная ручка (
| Название | Описание |
|---|---|
| 0 | Отображает стандартное изображение B-индикатора, чтобы подтвердить правильную работу всех элементов. |
| 1 | Подтверждает задержку времени срыва захвата, состояние настройки AIM-7 и работу индикатора дальности. |
| 2 | Подтверждает правильное прицеливание головки AIM-7 и работу короткого импульса по двум целям. |
| 3 | Подтверждает работу отслеживания угла по захваченной цели, которая вращается внутри круга ASE. |
| 4 | Используется при захвате цели в другом режиме, подтверждает работу HOJ и AOJ. |
| 5 | Проверяет скорость сближения, угол упреждения, CAA и работу PLMS. |
| 6 | Подтверждает правильное отображение атаки AIM-7 и работу блокировки. |
| 7 | Недоступно |
| 8 | Недоступно |
| 9 | Недоступно |
| 10 | Недоступно |
| DOT BAL | Подтверждает калибровку центрирования точки прицеливания. Также используется для передачи данных TIRS. |
Переключатель измерителя
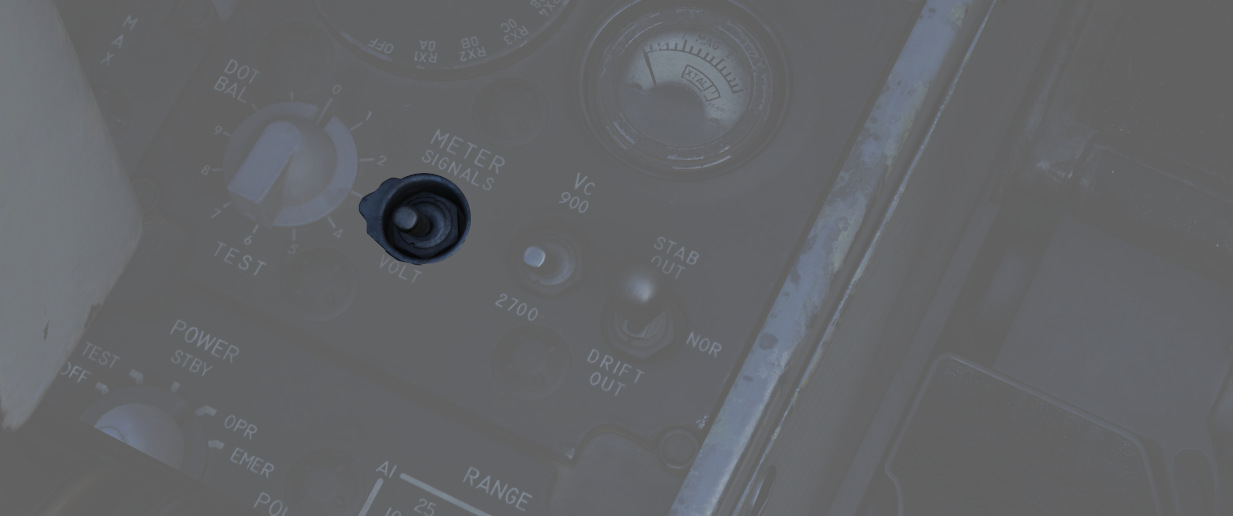
Двухпозиционный переключатель (
Переключатель Vc
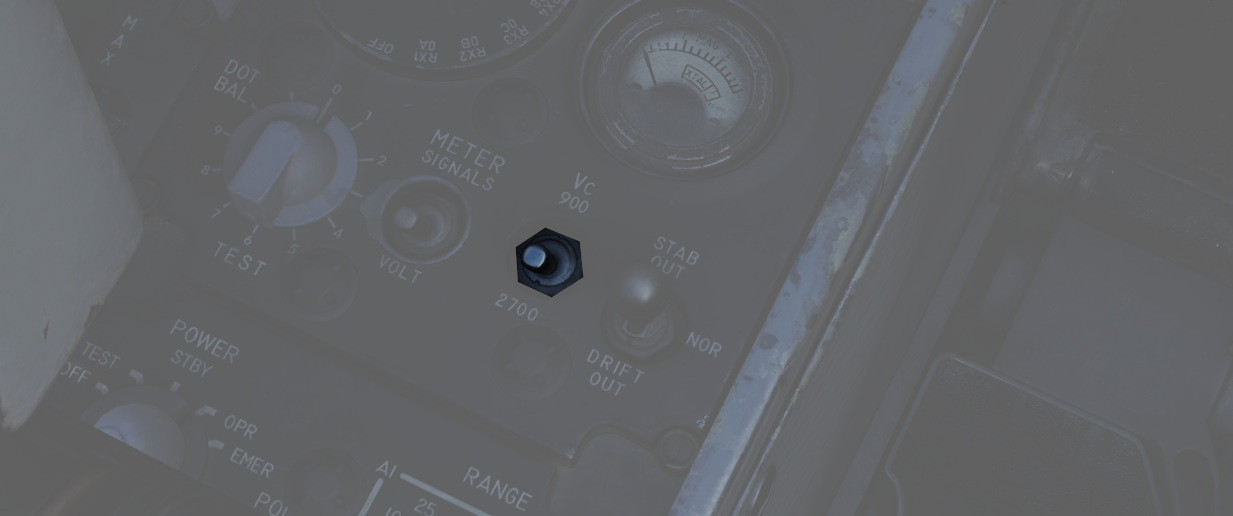
Двухпозиционный переключатель (
Переключатель Stab
Трёхпозиционный переключатель (
| Название | Описание |
|---|---|
| NOR | Нормальная работа; сигналы тангажа и крена подаются на цепь стабилизации антенны. |
| STAB OUT | Линия горизонта удаляется с индикаторов, а сервоприводы сноса стабилизации обнуляются. |
| DRIFT OUT | Компенсация сноса INS удаляется; антенна использует прямое отслеживание входных данных тангажа и крена. |
Центральная секция
Центральная часть левой консоли содержит панель управления радаром и средствами противодействия.
Панель управления радаром
Более подробное описание всех функций см. в разделе Панель управления радаром.

Ручка питания
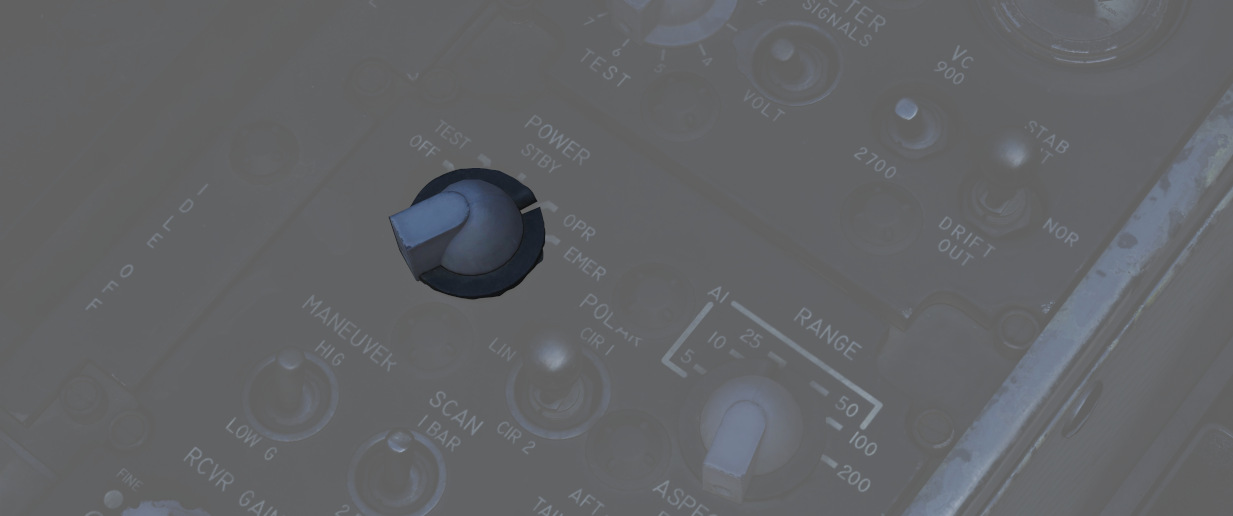
Пятипозиционный поворотный переключатель (
| Название | Описание |
|---|---|
| OFF | Отключает питание радара. |
| TEST | Подаёт напряжение на питание контрольного монитора и обеспечивает функции тестирования BIT с 1 по 6. |
| STBY | Питание подаётся на радар, он остаётся в непередающем режиме ожидания. |
| OPR | Система полностью работоспособна. |
| EMER | Отключает ограничения по времени задержки, давлению и температуре, чтобы разрешить работу радара. |
Подробнее см. раздел Питание радара..
Переключатель Polar

Трёхпозиционный переключатель (
Подробнее см. раздел Ручка поляризации радара.
Ручка Range
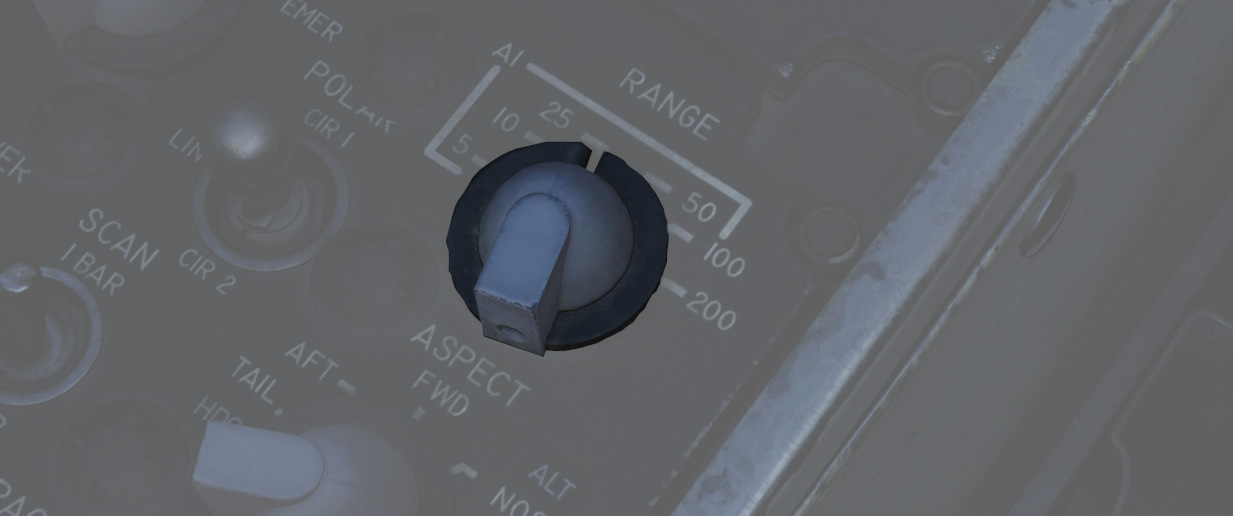
Поворотный переключатель (
Подробнее см. раздел Ручка дальности радара.
Переключатель Maneuver

Двухпозиционный переключатель (
См. раздел Ручка манёвра радара
Переключатель Bar Scan
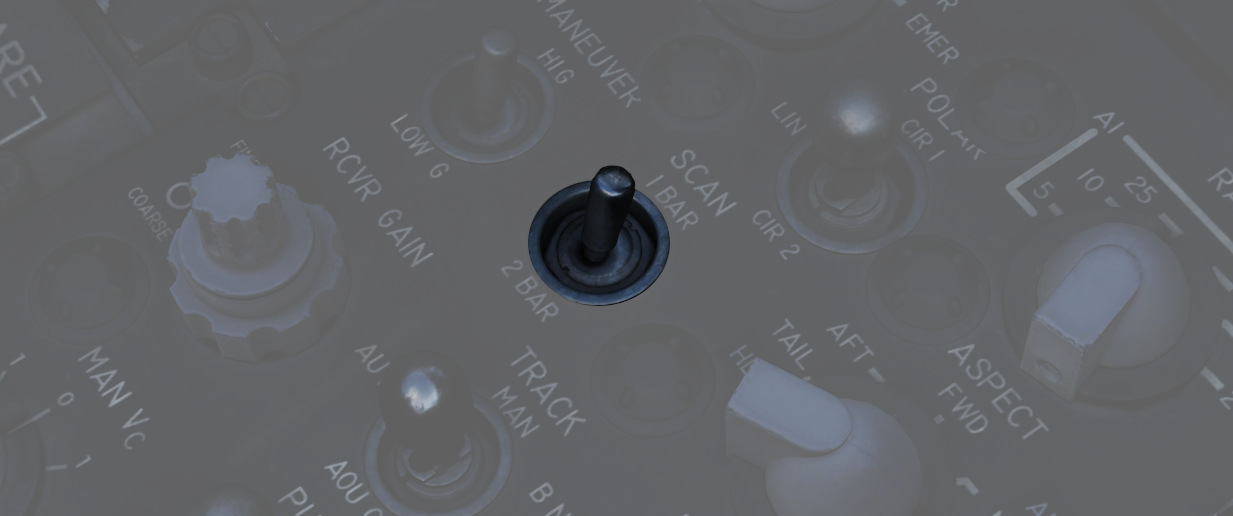
Двухпозиционный переключатель (
Подробнее см. раздел Переключатель сканирования радара.
Ручка Aspect

Поворотный переключатель (
Подробнее см. раздел Ручка Aspect.
Ручки усиления приёмника (RCVR GAIN)

Грубая (внешнее кольцо,
Подробнее см. раздел Ручка усиления приёмника.
Переключатель Track

Трёхпозиционный переключатель (
Подробнее см. раздел Переключатель отслеживания радара.
Ручка Display

Поворотный переключатель (
| Название | Описание |
|---|---|
| B WIDE | Выбирает 120-градусную B-развёртку для поиска. Полунажатие переводит развёртку под ручное управление с помощью ручки управления антенной. |
| B NAR | Выбирает 45-градусный сектор B-развёртки для поиска, который вручную смещается с помощью ручки управления антенной. |
| PPI WIDE | Выбирает 120-градусную широкую круговую развёртку для режима MAP. |
| PPI NAR | Выбирает 45-градусную круговую развёртку, которую можно смещать с помощью ручки управления антенной. |
| VI | Обеспечивает наведение по принципу чистого преследования на захваченную цель для визуального перехвата; крестик X появится на дальности 1000 футов. |
Ручка Manual Vc

12-позиционный переключатель (
Числа умножаются на 100 узлов, при этом сближение означает приближение к F-4, а расхождение означает, что цель удаляется от F-4.
Подробнее см. раздел Ручка MAN Vc
Переключатель Pulse

Трёхпозиционный переключатель (
| Название | Описание |
|---|---|
| AUTO | Использует переключение режима уровня мощности для определения наилучшего выбора импульса. Выбирает короткий импульс, используемый для захвата и отслеживания. |
| LONG | Большая длительность импульса и низкая PRF, что обеспечивает максимальную дальность обнаружения; нет автоматической регулировки импульса при отслеживании. |
| SHORT | Малая длительность импульса с высокой PRF для повышения эффективности на близком расстоянии. |
Подробнее см. раздел Переключатель Pulse.
Ручка Mode

Шестипозиционный поворотный переключатель (
| Название | Описание |
|---|---|
| BST | Визирование "воздух-воздух" с антенной, совмещённой с линией визирования радара, и оптическим прицелом с прицелом в режиме A/A. |
| RDR | Режим поиска с нутацией облучателя (большая ширина луча). |
| MAP | Режим поиска без нутации облучателя (меньшая ширина луча). |
| AIR-GRD | Визирование "воздух-земля", отслеживает дальность до освещённой земли, радар совмещён с линией визирования радара с компенсацией сноса. |
| BEACON | Радар принимает и отображает сигналы от наземных или бортовых радиомаяков для навигации. |
| TV | Не используется с DSCG. Разлаживает AIM-7,если выбран, предотвращая наведение Sparrow. |
💡 Радиомаяки в настоящее время не реализованы в DCS и поэтому не могут быть использованы.
Подробнее см. раздел Ручка Mode.
Индикатор захвата цели
Индикатор (
РУДы

РУДы для каждого двигателя F-4E Phantom II расположены на левой консоли передней и задней кабин. Механическая тяга передаёт движение РУД на регулятор подачи топлива двигателя. РУД задней кабины не включает форсаж. На заднем РУДе расположены переключатель воздушного тормоза и переключатель микрофона.
Воздушный тормоз

Воздушные тормоза приводятся в действие трёхпозиционным переключателем (
Дополнительную информацию см. в главе 3.1.2 Рулевые поверхности.
Переключатель микрофона

Переключатель микрофона (
Блок управления кабиной AN/ALE-40 (CCU)

CCU - это основная панель управления системой средств противодействия.
Она используется для выбора различных режимов работы и даёт WSO возможность сбрасывать средства противодействия.
Дополнительную информацию см. CCU.
Кнопка сброса
Кнопка (
Переключатель Ripple
Защищённый крышкой (
💡 Примерно через 10 секунд все тепловые ловушки будут сброшены.
Счётчики
Показывает количество оставшихся патронов с дипольными отражателями (
Они автоматически устанавливаются наземным экипажем при перезаряжании.
Ручка режима дипольных отражателей
Поворотная ручка (
| Название | Описание |
|---|---|
| OFF | Система дипольных отражателей неактивна. |
| SGL | Один импульс при нажатии кнопки сброса. |
| MULT | Залп выполняемый в соответствии с программатором,при нажатии любой кнопки сброса. |
| PROG | Несколько залпов, выполняемых в соответствии с программатором, при нажатии любой кнопки сброса. |
Ручка режима тепловых ловушек
Ручка режима тепловых ловушек (
| Название | Описание |
|---|---|
| OFF | Система тепловых ловушек неактивна. |
| SGL | Один импульс при нажатии кнопки сброса. |
| PROG | Залп, выполняемый в соответствии с программатором, при нажатии любой кнопки сброса. |
Индикаторы
Загораются (5 and 8) всякий раз, когда на соответствующей ручке режима средств противодействия выбран режим.
Можно вращать для регулировки яркости и нажимать для тестирования.
Задняя секция
В задней части левой консоли находятся органы управления связью и навигацией.
Панель управления TACAN

Панель управления TACAN используется для ввода желаемого канала TACAN, режима и громкости звука для мониторинга этого канала экипажем. Панель продублирована в обеих кабинах, а панель, управляющая приёмником TACAN, выбирается кнопкой NAV CMD панели управления связью.
Ручки настройки канала
На панели управления есть две ручки управления навигационным каналом (7, 4 и 3), причём левая (
Кнопка и индикатор тестирования
Между этими двумя ручками находится кнопка TEST (
Индикатор над кнопкой загорается, чтобы указать на состояние теста.
Дополнительную информацию см. в главе 7.19.4 Процедуры тестирования навигации.
Ручка регулировки громкости
В правом верхнем углу находится ручка VOL (
Селектор функций
Ручка выбора функции TACAN (
| Название | Описание |
|---|---|
| OFF | Приёмник TACAN обесточен и отключён. |
| REC | Приёмник TACAN активен, предоставляя информацию о пеленге на HSI, BDHI, и ADI. |
| T/R | Обе функции приёма и передачи TACAN активны, что обеспечивает информацию о пеленге и дальности в морских милях для HSI и BDHI. |
| A/A REC | Приёмник TACAN декодирует информацию о пеленге с совместимых самолётов для отображения на HSI, BDHI, и ADI steering display. |
| A/A TR | Приёмник TACAN получает информацию как о пеленге, так и о наклонной дальности в морских милях от передающего самолёта, предоставляя её на HSI и BDHI. |
💡 Для работы функции "воздух-воздух" TACAN необходимо установить канал на 63 канала выше или ниже канала взаимодействующего самолёта, но в том же диапазоне - X или Y. Так, заправщик на канале 123Y должен быть установлен на канале 60Y на F-4.
Панель управления связью

Панель управления связью обеспечивает выбор и режим работы UHF radio в самолёте.
Командные кнопки
Панель продублирована в обеих кабинах, а управление радиостанцией определяется нажатием кнопки COMM CMD (
Громкость радио
Под кнопкой COMM CMD находится регулятор громкости радио (
Переключатель шумоподавления
Рядом с кнопкой NAV CMD находится переключатель шумоподавления (
Частота и каналы
Ручка выбора A-3-2-T (
💡 Из-за ограничений движка режимы A и T, относящиеся к функции HAVE-Quick, не моделируются.
Четыре ручки выбора частоты работают совместно с ручкой A-3-2-T и переключателем Preset/Manual. Частоты вводятся, начиная с выбора 3 или 2 на селекторе A-3-2-T, и могут быть введены от 225,00 до 399,975 МГц с шагом 0,025. Когда переключатель Preset/Manual (
Прямо под ручкой управления каналом связи находится ручка
(
Ручка регулировки громкости Aux (
Кнопку Set (
Кнопка тона
Кнопка Tone (
💡 Из-за ограничений движка кнопка тона, относящаяся к функции HAVE-Quick, не моделируется.
Селектор функций связи
Ручка выбора функции связи (
| Название | Описание |
|---|---|
| OFF | Все радиостанции UHF выключены. |
| T/R ADF | Приёмник связи - приём связи. |
| Передатчик связи - передача связи. | |
| CПередатчик связи - передача связи. | |
| Вспомогательный приёмник - приём ADF. | |
| T/R+G ADF | Приёмник связи - приём связи. |
| Передатчик связи - передача связи. | |
| Защищённый приёмник - защищённый приём. | |
| Вспомогательный приёмник - приём ADF. | |
| ADF+G CMD | Приёмник связи - приём ADF. |
| Передатчик связи - передача связи. ADF прерывается во время передачи. | |
| Защищённый приёмник - защищённый приём на антенне ADF. | |
| Вспомогательный приёмник - приём связи. | |
| ADF+G | Приёмник связи - приём ADF. |
| Передатчик связи - передача связи. ADF прерывается во время передачи. | |
| Защищённый приёмник - ожидание. | |
| Вспомогательный приёмник - защищённый приём. | |
| Guard ADF | Приёмник связи - защищённый приём. |
| Передатчик связи - защищённая передача. | |
| ащищённый приёмник - ожидание. | |
| Вспомогательный приёмник - приём ADF. |
Индикатор высоты кабины

Отображает текущее давление внутри кабины как эквивалентную эффективную высоту кабины над средним уровнем моря в тысячах футов.
То есть, если прибор показывает 5, давление внутри кабины эквивалентно высоте 5000 футов над уровнем моря.
Чтобы предотвратить недомогание и гипоксию, следует следить за давлением и соответствующим образом регулировать подачу кислорода:
| Диапазон давления | Описание |
|---|---|
| ниже 13 000 футов | Дышите обычным воздухом |
| 13000 футов - 40000 футов | Дышите кислородом через маску |
| 40000 футов - 62000 футов | Дышите кислородом под давлением через маску |
| выше 62 000 футов | Необходимо носить высотный костюм (недоступен) |
Дополнительную информацию см. в главе 3.7 Вспомогательное оборудование, раздел Кислород.
Индикатор количества кислорода
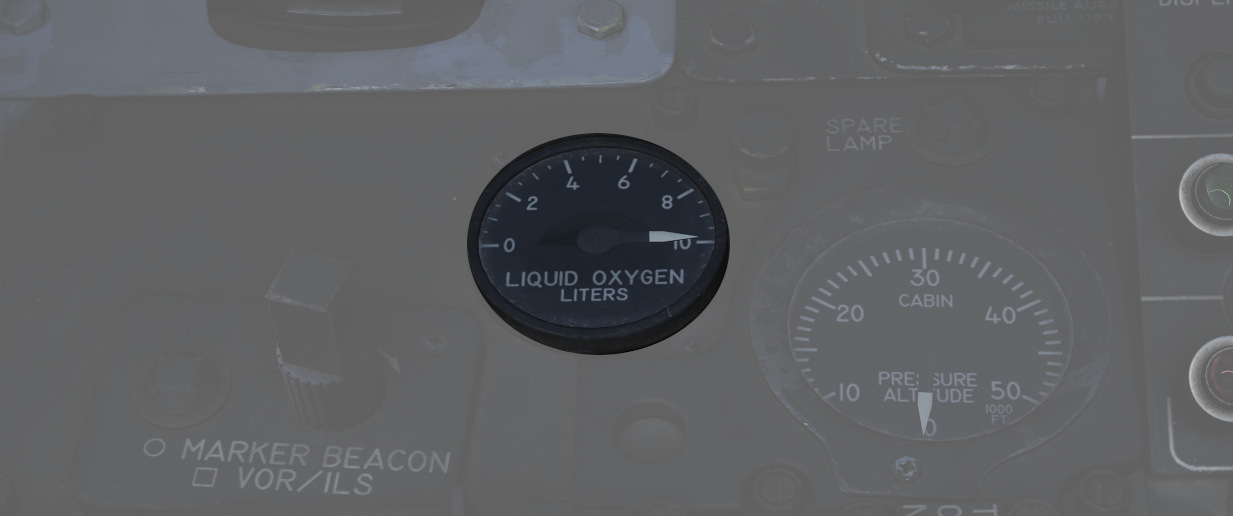
Он имеет диапазон от 0 до 10 литров. Потеря электропитания обозначается появлением флажка отключения питания на лицевой панели прибора.
Регулятор громкости VOR/ILS

Регулятор громкости состоит из двух ручек: одна квадратная ручка (
Дополнительную информацию см. в главе 3.3.4 VOR/ILS.
Левая стенка
Аварийный рычаг сброса фонаря

Используемый для аварийной эвакуации на земле, аварийный рычаг сброса фонаря выпускает баллон со сжатым кислородом, чтобы немедленно открыть соответствующий фонарь, отрывая его от шарниров.
Переключатель управления фонарём

Используется для открытия (назад) или закрытия (вперёд) фонаря WSO.
Аварийный рычаг закрылков

Используется для аварийного выпуска предкрылков и закрылков из задней кабины и активируется путём оттягивания рычага назад. Пневматическая система, приводящая в действие систему выпуска предкрылков/закрылков, работает только один раз. Выпускает независимо от воздушной скорости; однако закрылки не будут полностью выпускаться на скорости выше 230 узлов из-за аэродинамических нагрузок на рулевые поверхности. Полностью выпустятся на меньшей скорости.
Панель LABS

Aural Tone Volume
Ручка (
Pull Up Tone
Переключатель (
Группа на пьедестале
Эта область за РУСом содержит экран радара (

Цифровое устройство преобразования развёртки (DSCG)

DSCG отображает радиолокационные данные, видеосигнал с оружия и прицельного контейнера.
Крышку противобликового козырька можно снять, щёлкнув по ней.
Ручка Grid
Эта ручка, расположенная в левом верхнем углу над противобликовым козырьком, регулирует яркость сетки на поле зрения дисплея DSCG; вращение по часовой стрелке увеличивает яркость, вращение против часовой стрелки уменьшает яркость.
Шкала
В правом верхнем углу над противобликовым козырьком находится ручка, которая регулирует яркость шкал угла и угла места, окружающих поле зрения дисплея DSCG; вращение по часовой стрелке увеличивает яркость, вращение против часовой стрелки уменьшает яркость.
Индикатор H - Home on Jam
Индикатор в левом верхнем углу противобликового козырька загорается, когда радар захватил цель по углу в режиме Home on Jam.
T - Track Lamp
Индикатор, расположенный в правом верхнем углу противобликового козырька, загорается при достижении стандартного захвата цели радаром. Погаснет, если радар перейдёт в режим использования запомненной информации о дальности и скорости в случае потери захвата.
Ручка яркости курсора (RNG)
Ручка Cursor RNG (
Ручка яркости смещения (OFS)
Ручка Cursor OFS (
Ручка контрастности - CONTR
Ручка контрастности (
Ручка яркости
Ручка яркости (
Ручка режима
Поворотная ручка режима (
| Название | Описание |
|---|---|
| OFF | Выключает дисплей DSCG и отключает питание всех компонентов DSCG. |
| STBY | Включает питание компонентов DSCG, дисплей DSCG остаётся выключенным. Используется для взлёта и посадки. |
| DSCG TEST | Отображает тестовое изображение поиска с 8 оттенками серого, чтобы подтвердить нормальную работу. Выберите Range 10 для правильного размера. |
| RDR BIT | Предоставляет тестовые сетки последовательности BIT test для калибровки работы радара. |
| RDR | Используется для работы радиолокационного дисплея во всех режимах применения. |
| TV | Используется для телевизионного растрового изображения с электрооптическим оружием, а также с прицельными контейнерами. |
Набор органов управления целеуказателем

Это основная панель для взаимодействия с прицельным контейнером Pave Spike.
Яркость сетки
Ручка (
Ручки визирования
Три ручки (2, 3 и 4) для управления положением визирования контейнера по азимуту, углу места и крену в пределах 2,5 градусов в любом направлении.
Азимут и угол места лучше всего калибровать в режиме 12-VIS, а крен - в режиме 9-VIS.
💡 Обычно контейнер правильно калибруется наземным экипажем перед посадкой в самолёт, но может смещаться из-за боевых повреждений или манёвров с большой перегрузкой, и в этом случае требуется повторная калибровка WSO.
Подробнее см. 3.11.5.6. Процедура визирования.
Кнопка Stow
Поочерёдное нажатие (
Когда головка выпущена, контейнер будет перемещаться в соответствии с выбранным режимом захвата.
Чтобы предотвратить повреждение системы, контейнер должен быть убран во время взлёта, посадки и любых манёвров с большой перегрузкой.
🟡 ВНИМАНИЕ: Убранное положение удерживается только электрически, и без питания контейнер свободно качается и повреждается при сильном ударе о пределы подвеса.
Кнопка выбора готовности лазера
Нажатие кнопки (
Индикатор остаётся выключенным, если блокировки (носовая стойка шасси убрана и все функции контейнера работают) запрещают использование. Последующее нажатие отключает лазерную систему.
Кнопка включения
Подаёт (
Чтобы предотвратить повреждение системы, при наличии контейнера следует включать питание системы, даже если контейнер не используется.
Кнопка выбора BIT
Нажимается (
BIT 1 - это обычный режим контейнера, и его необходимо выбрать для нормальной работы.
Ручка яркости индикаторов
Поворотная ручка (
Кнопка отклонения/отключения
Когда контейнер обнаруживает слишком большое расхождение между наклонной дальностью, измеренной лазером, и дальностью, вычисленной на основе INS, он автоматически отклоняет первую и предпочитает последнюю.
В этом случае кнопку (
Переключатель выбора режима захвата
Трёхпозиционный переключатель (
| Название | Описание |
|---|---|
| 12-VIS | Совмещает линию визирования с визирной маркой оптического прицела. |
| WRCS | Совмещает линию визирования с курсорами WRCS, если интеграция WRCS не отключена; в противном случае возвращается к 12-VIS. |
| 9-VIS | Совмещает линию визирования с точкой на 90 градусов ниже FRL и повёрнутой на 90 градусов влево. |
WRCS Out
Если горит (
Можно нажать, чтобы вручную отключить или включить интеграцию, если она не была отключена другими средствами.
Индикатор состояния BIT
Загорается (
Индикатор перегрева
Индикатор OVHT загорается (
Чтобы предотвратить повреждение, выключите контейнер и дайте ему остыть перед дальнейшим использованием. Игнорирование индикатора приведёт к расплавлению частей контейнера, что нанесёт ему непоправимый ущерб.
Чтобы продлить срок службы контейнера и предотвратить перегрев, ограничьте медленный полёт на малой высоте, а также непрерывное использование лазера. В качестве эмпирического правила не используйте лазер дольше 15 минут без охлаждения между использованиями. Ограничьте непрерывный медленный полёт на малой высоте при работе с контейнером до 30 минут. Для экстремальных температур наружного воздуха отрегулируйте ограничения соответствующим образом.
INS Out
Если горит (
Можно нажать, чтобы вручную отключить или включить интеграцию, если она не была отключена другими средствами.
Кривошип регулировки педалей руля направления

Используется для регулировки эргономичного положения педалей руля направления вперёд или назад от WSO.
Требуется 12 полных оборотов, чтобы переместить педали по всему диапазону.
Правая вспомогательная панель

Правая вспомогательная панель содержит органы управления постановкой помех, шифрованием и различные настройки для ручного бомбометания.
Индикатор/переключатель катапультирования

Индикатор EJECT подаёт WSO визуальную команду от пилота подготовиться к катапультированию. Индикатор управляется только из передней кабины. Если EJECT lamp в передней кабине нажат, это сигнализирует WSO о необходимости подготовиться к немедленному катапультированию.
💡 Только пилот может подать сигнал катапультирования. Если WSO нажмёт на индикатор, это будет только проверкой лампы и не включит индикатор пилота.
Органы управления KY-28

Органы управления системой шифрования KY-28. Дополнительную информацию см. в главе «Шифрование».
Органы управления ECM

Органы управления системой радиоэлектронного противодействия и постановки помех.
Левая панель подключена к любым контейнерам, установленным на левых станциях, правая панель - к станциям справа.
Интерпретация режимов, методов и точной работы индикаторов зависит от загруженной модели постановщика помех. Подробнее см. в разделе «ECM» for details.
Ручка режима

Поворотный регулятор (
| Режим | Описание |
|---|---|
| OFF | Выключен, нет передачи |
| STBY | Начало прогрева, нет передачи (200 секунд для ALQ-131) |
| XMIT 1 | Передача и постановка помех с использованием метода 1 |
| XMIT 2 | Передача и постановка помех с использованием метода 2 |
| BOTH | Передача и постановка помех с использованием методов 1 и 2 |
Использование на земле запрещено, так как это может представлять опасность для персонала.
Индикаторы STBY
Два индикатора (
Время прогрева для контейнера ALQ-131 составляет примерно 200 секунд.
Индикаторы XMIT
Два индикатора (
Индикатор AI
Указывает (
💡 Из-за ограничений движка это в настоящее время не моделируется в игре.
Кнопка и индикатор сброса
Индикатор сброса (
В случае неисправности можно нажать кнопку сброса, чтобы сбросить систему постановки помех (аналогично выключению и повторному включению), и в этом случае она снова пройдёт через период прогрева. Если неисправность будет устранена, индикатор погаснет.
Вычислитель угла сброса бомбы

Используется для ввода необходимых значений угла для режимов бомбометания ARBCS/LABS; регулятор Low Angle (
Регулятор High Angle используется для бомбометания через плечо, а регулятор Low Angle - для бомбометания LOFT.
Для расчёта углов см. калькулятор бомбометания.
Таймеры бомбометания

Ввод соответствующего времени для сигнала набора высоты или сброса осуществляется с помощью таймеров бомбометания.
Таймер набора высоты (
Таймеры бомбометания можно использовать для любого метода сброса с задержкой.
См. главу 9.4 Калькулятор бомбометания, чтобы узнать, как рассчитать число.
Правая консоль
Правая консоль дополнительно разделена на 4 секции.
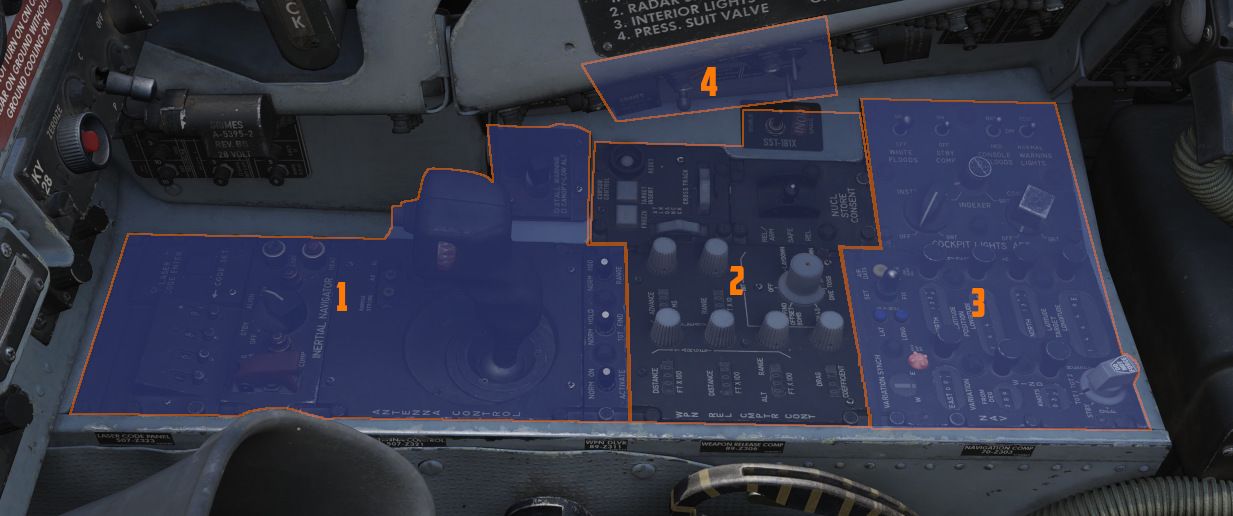
| Секция | Название |
|---|---|
| 1. | Передняя |
| 2. | Центральная |
| 3. | Задняя |
| 4. | Стенка |
Передняя секция
Передняя часть содержит органы управления сбросом оружия иINS.
Панель управления кодировщиком лазера

WSO может установить код лазера, используемый прицельным контейнером, с помощью четырёх маленьких кнопок на этой панели.
Кнопки кода
Каждое нажатие (
Коды напрямую связаны с частотами лазера, в результате чего они должны быть от 1111 до 1788 и не использовать цифры 0 или 9, чтобы быть действительными.
💡 Коды лазера оружия можно настроить в редакторе миссий или во время перезаряжания, используемый по умолчанию код - 1688.
Кнопка Enter
После установки кода его можно передать на Pave Spike, нажав кнопку ENTER (
Когда на систему подаётся питание, она автоматически запускает передачу текущего установленного кода.
Индикатор No Go
Проверка введённого кода занимает около 5 секунд. Если индикатор NO-GO горит, код недействителен.
Панель управления инерциальной навигацией

Панель управления инерциальной навигацией предоставляет заднему пилоту выбор режима и выбор команды выравнивания системы.
Дополнительную информацию см. в разделе 3.3.2 Навигация INS
Переключатель выбора режима
Переключатель HDG MEM-GYRO COMP (
💡 Курс можно сохранить в редакторе миссий.
Ручка управления питанием
Положения ручки(
| Название | Описание |
|---|---|
| OFF | Система выключена. |
| STBY | Питание подаётся на нагреватели и систему контроля температуры, и запускается грубое выравнивание (если на тумблере выбрано GYRO COMP. |
| ALIGN | Выполняет точное выравнивание платформы и гироскопа, а также выравнивание BATH (или HDG MEM) . Затем, если возможно, выполняет выравнивание по гироскопическому компасу(точное). |
| NAV | Активирует INS для функции навигации, производительность которой зависит от качества выравнивания. |
Индикатор HEAT
Индикатор HEAT (
Индикатор ALIGN
Индикатор ALIGN (
Ручка управления антенной

Джойстик, который интегрирован с радаром для управления положением символа захвата на радиолокационном дисплее в режимах "воздух-воздух" по дальности (вперёд и назад) и азимуту (влево и вправо), а также направлением головки самонаведения/электрооптического датчика с помощью AGM-65 Maverick и Pave Spike.
Регулятор угла места антенны
Колесо (
Кнопка Challenge
При управлении радаром кнопка (
Для прицельного контейнера Pave Spike она вместо этого переключает поле зрения между WIDE и NARROW.
Переключатель Action (спусковой крючок)
Двухпозиционный спусковой крючок (
Регулировка визирования

Положение визирования ручки антенны можно отрегулировать у её основания с помощью отвёртки. После установки новые значения можно загрузить, нажав кнопку под ней.
Это доступно только наземному персоналу.
Панель сброса оружия

Переключатель ACTIVATE
Двухпозиционный переключатель (
Переключатель TGT FIND
Двухпозиционный переключатель (
Переключатель RANGE
Выбор x100 на двухпозиционном переключателе (
Панель регулировки громкости

На маленькой панели справа от ручки управления антенной находятся две комбинированные ручки для регулировки громкости.
Предупреждение о не зафиксированном фонаре/малой высоте
Кубическая ручка (
Эта система не установлена на данном варианте F-4E.
Предупреждение о сваливании
Ручка предупреждения о сваливании (
В определённых условиях система может переопределить громкость, чтобы гарантировать, что сигнал всегда слышен в опасных ситуациях.
Центральная секция
Центральная часть правой консоли занята панелью WRCSдля сброса оружия. Дополнительную информацию см. в главе «WRCS».
Панель вычислителя сброса оружия (WRCS)
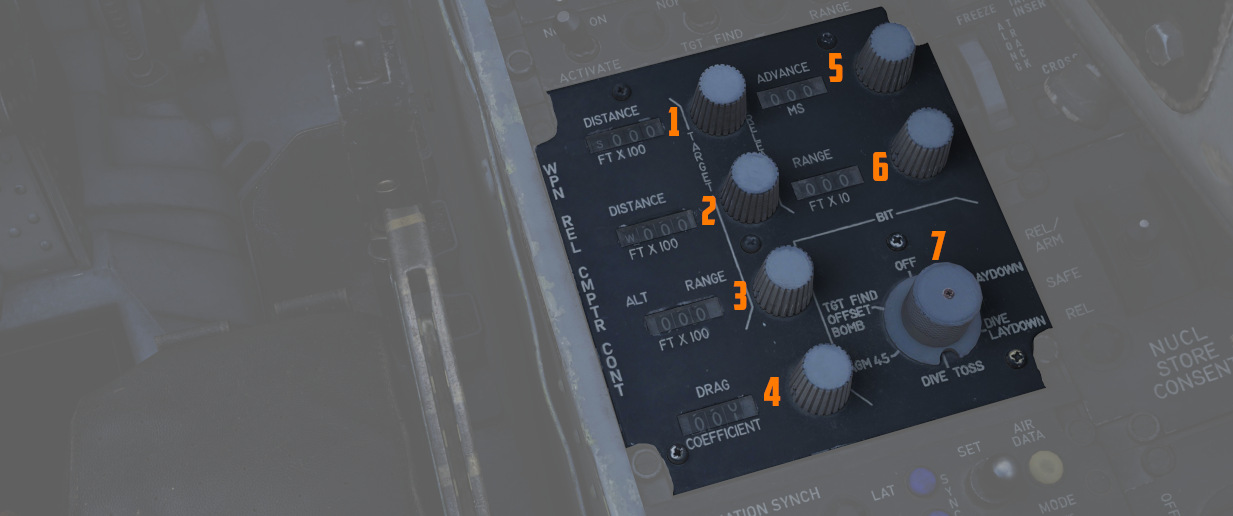
Органы управления расстоянием до цели
Пара четырёхпозиционных барабанных роликовых окон с соответствующими аналоговыми ручками. Верхнее окно (
Ролики показывают расстояние с шагом 100 футов, таким образом, расстояние смещения в восточном направлении на 4000 футов будет введено как E0040.
Ролики работают в аналоговом режиме, поэтому доли 100 футов можно получить, соответствующим образом регулируя последний ролик; например, значение 250 футов будет достигнуто, когда пространство между значениями 2 и 3 будет находиться посередине окна в позиции последней цифры.
Регулятор высоты цели/IP
Трёхпозиционное барабанное роликовое окно (
Регулятор коэффициента сопротивления
Трёхпозиционное барабанное роликовое окно (
🚧 Таблицы поиска будут предоставлены в ближайшее время. Однако калькулятор бомбометания предоставляет рабочие решения для всего оружия независимо от этого.
Регулятор упреждения сброса
Трёхпозиционное барабанное роликовое окно (
Это можно использовать для распределения бомбометания по площади цели, например, чтобы разместить 3-ю бомбу из 10-бомбового залпа на цели.
Упреждение сброса можно рассчитать с помощью калькулятора бомбометания.
Регулятор дальности сброса
Трёхпозиционное барабанное роликовое окно (
Дальность можно рассчитать с помощью калькулятора бомбометания.
Ручка BIT WRCS
Шестипозиционная ручка (
Подробнее см. BIT WRCS.
Панель управления курсором
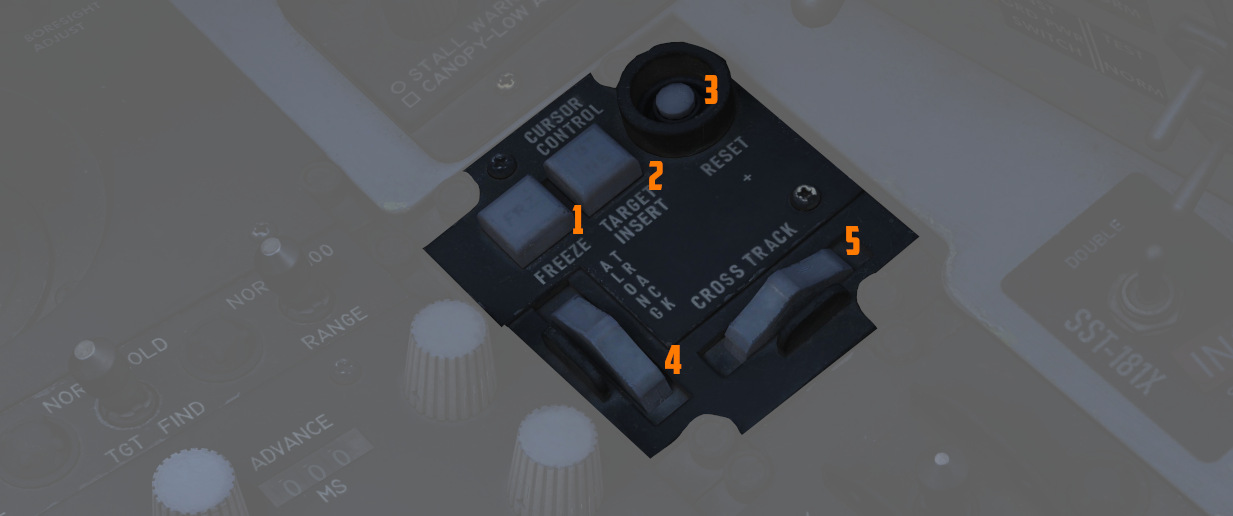
Используется для ввода цели в режиме бомбометания с радаром WRCS . Работает только при выбранном режиме MAP-PPI и соответствующем режиме бомбометания, выбранном на ручке режима доставки.
Кнопка Freeze
Кнопка (
Кнопка Target Insert
Кнопка (
Система Pave Spike также использует функцию Target Insert для своего режима памяти.
Кнопка Reset
Нажатие кнопки Reset (
Колесо Along Track
Колесо Along Track (
Колесо Cross Track
Колесо Cross Track (
Переключатель согласия на применение ядерных боеприпасов

Используется для включения ядерных боеприпасов. В положении SAFE сброс заблокирован. REL разрешает сброс боеприпасов в невооружённом состоянии, а REL/ARM разрешает сброс ядерных боеприпасов в вооружённом состоянии.
Режим Skyspot

На правой внешней стороне правой консоли находится переключатель, который позволяет выбрать режим системы Combat Skyspot, используемой для бомбометания с наведением с земли.
Система никогда не устанавливалась на данном варианте F-4E.
Задняя секция
В задней части правой консоли находится панель навигации и освещения.
Панель навигации

Панель управления навигационным компьютером служит интерфейсом для управления навигацией самолёта, включая его местоположение и цели для навигационных приборов, таких как HSI и BDHI. Она может работать в двух режимах: INERTIAL и AIR DATA.
Подробнее см. Навигационный компьютер.
Панель оснащена рядом ручек управления и переключателей, необходимых для работы навигационного компьютера.
Ручка выбора функции

Пятипозиционный поворотный переключатель (
| Положение | Описание |
|---|---|
| OFF | Система выключена. |
| STBY | Система включена, но интеграция положения по широте и долготе отключена. |
| TARGET 1 | Вычисляет дальность и пеленг до выбранных координат, установленных на роликах TARGET. |
| TARGET 2 | Вычисляет дальность и пеленг до запомненных координат. |
| RESET | Очищает запомненные координаты. При возврате в положение TARGET 2 выбранные координаты, установленные на роликах TARGET, запоминаются. |
Ручки и счётчики управления ветром

Две поворотные ручки (
Ручка и счётчики магнитного склонения

Поворотная ручка (
Ручки и счётчики управления положением

Эти ручки (
💡 В режиме INERTIAL переключатель обновления положения необходимо использовать совместно с этими ручками для обновления координат положения.
Ручки и счётчики управления целью

Органы управления целью (
Переключатель обновления положения

Трёхпозиционный переключатель (
| Положение | Описание |
|---|---|
| SET | Отключает механизм обновления счётчиков положения, позволяя свободно вращать их до желаемого положения. |
| NORMAL | Счётчики положения обновляются на основе сигнала INS в режиме Inertial или по собственным расчётам системы в режиме Air Data. |
| FIX | Обновляет положение INS со скоростью примерно 3 угловые минуты в секунду. |
💡 Переключатель имеет задержку примерно 0,5 секунды при установке в положение NORM, предназначенную для предотвращения нежелательных обновлений счётчиков во время перехода из SET в FIX.
Индикатор синхронизации склонения
В режиме Inertial этот индикатор (
Индикатор снятия тестовой крышки
Загорается (
Индикаторы синхронизации широты и долготы
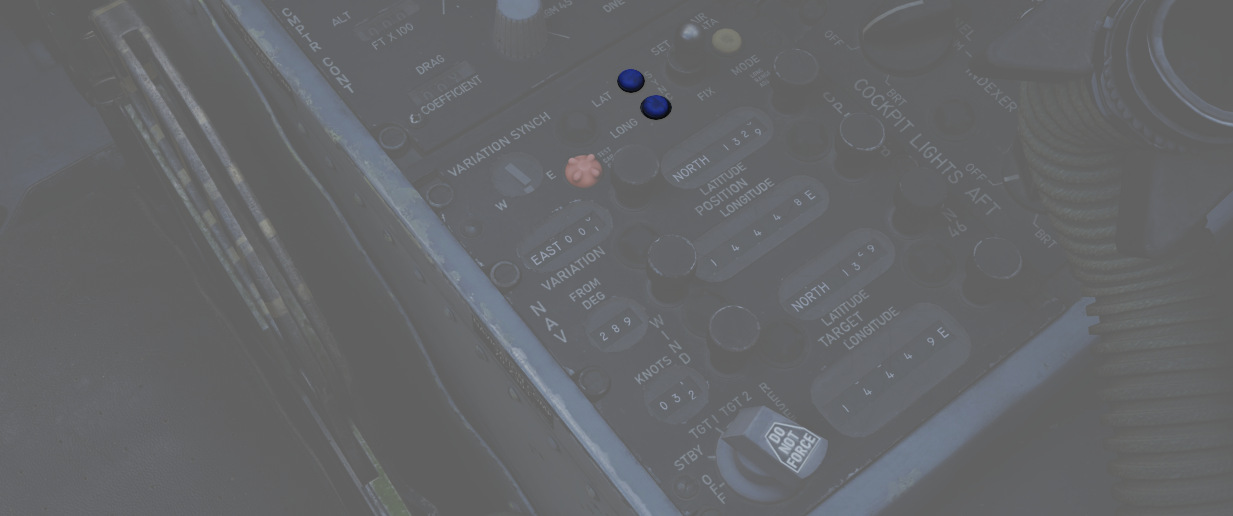
Загораются (
Индикатор режима Air Data
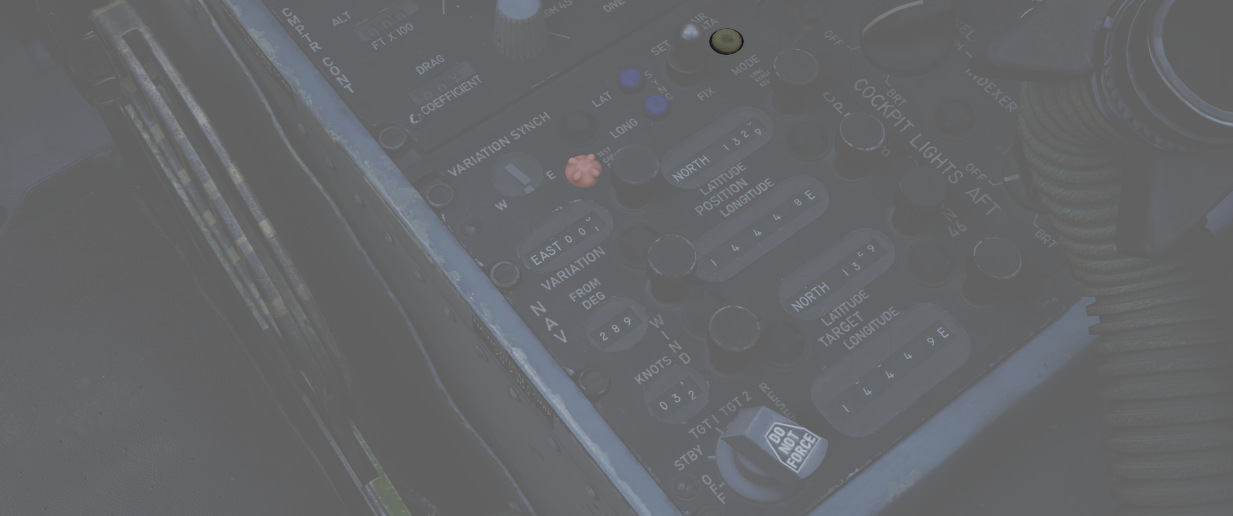
Включение (
Панель управления освещением кабины

Панель управления освещением кабины обеспечивает управление всей подсветкой панели, освещением панели пилотажных приборов, прожекторами консоли, белыми прожекторами, расположенными под бортом фонаря над каждой консолью, а также включает в себя переключатель тестирования сигнальных ламп и подсветки резервного компаса.
Белый прожектор
Переключатель белого прожектора (
Переключатель резервного компаса
Переключатель STBY COMP (
Прожектор консоли
Этот переключатель (
💡 Чтобы выключить их, установите переключатель в положение DIM, а ручку консоли в положение OFF.
💡 Прожекторами для панели приборов управляет пилот, см. переключатель подсветки приборов.
Переключатель тестирования сигнальных ламп
Переключатель тестирования сигнальных ламп (
Ручка панели приборов
Эта ручка (
💡 Основные пилотажные приборы управляются пилотом с помощью ручки яркости пилотажных приборов.
Ручка Indexer
Регулирует яркость (
Ручка консоли
Ручка регулировки яркости консоли (
Правая стенка
На правой стенке находятся вспомогательные переключатели для тестирования и запуска самолёта.
Ручка ручного разблокирования фонаря

Ручка ручного разблокирования используется в случае отказа пневматической системы.
Ручка при оттягивании назад разблокирует фонарь, чтобы его можно было открыть. Перед ручной разблокировкой фонаря обычный рычаг управления должен быть установлен в положение OPEN.
При нормальной эксплуатации ручка должна оставаться в переднем положении.
Если фонарь не зафиксирован должным образом, на панели сигнальных ламп загорится предупреждение CANOPY UNLOCKED.
Панель наземного тестирования
Отключение аккумулятора
При включении (
Наземный тест автопилота
Переключатель наземного тестирования автопилота (
Наземное питание приборов
В положении TEST (
Это можно использовать во время холодного запуска после подачи наземного питания и перед запуском двигателей, чтобы уже настроить самолёт и запустить некоторые системы, которым требуется питание от этих шин.
РУС и кресло
РУС

РУС предусмотрен в обеих кабинах, с почти одинаковым расположением переключателей.
РУС можно скрыть, щёлкнув по его основанию.
Триммер
Триммер (
Спусковой крючок и кнопка сброса бомбы
Оружие можно применять как с помощью двухпозиционного спускового крючка (
Первое положение спускового крючка активирует фотопулемёт для записи видео вперёд.
Кнопка управления носовой стойкой шасси
На обоих РУСах есть кнопка управления носовой стойкой шасси (NWS или также NGS) (
Удержание кнопки нажатой позволяет члену экипажа управлять самолётом с помощью педалей руля направления. Подробнее см. раздел 3.1.3 «Шасси и управление на земле, управление носовой стойкой шасси».
Рычаг аварийного быстрого сброса
На каждом РУСе есть рычаг аварийного быстрого сброса, который позволяет немедленно отключить противоскользящую систему, систему автоматического управления полётом (AFCS), стабилизацию (STAB AUG) и ARI (взаимосвязь элеронов и руля направления).
Подробнее см. раздел 3.1.3 «Шасси и управление на земле, противоскользящая система».
Кресло

Кресло позволяет экипажу катапультироваться из самолёта, потянув за шнур между ног или над головой.
Подробнее о кресле и механизме катапультирования см. в разделе 3.13 «Аварийная система».
Регулировка положения кресла

Вертикальное положение кресла можно изменить в любом направлении примерно на 5 см с помощью этого подпружиненного переключателя на правой стороне кресла.
Для посадки рекомендуется установить кресло в самое верхнее положение для лучшей видимости.
Работа двигателя должна быть ограничена 30 секундами в течение 10 минут, чтобы предотвратить его перегрев и поломку.
Обзор систем
Эта глава даёт подробное описание и объяснение всех основных систем Фантома.
От системы двигателя до расхода топлива, рулевых поверхностей, как ориентироваться, эффективно использовать радар и оружие, или описание выравнивания INS и его гироскопической системы.

Система управления полётом
Эта глава содержит всю необходимую информацию об органах управления полётом, трёхколёсном шасси и основных пилотажных приборах F-4E.


Основные пилотажные приборы
Основные пилотажные приборы включают в себя все приборы, необходимые для базового пилотирования F-4E. В их число входят индикатор истинной воздушной скорости (TAS), индикатор путевой скорости, акселерометры, комбинированные индикаторы воздушной скорости и числа Маха, радиовысотомер и барометрический высотомер, резервный магнитный компас, вариометры, различные указатели поворота и скольжения, а также авиагоризонты.
Индикаторы истинной воздушной скорости

Индикаторы истинной воздушной скорости предусмотрены в обеих кабинах и имеют калиброванный диапазон от 150 до 1500 узлов. Сигнал скорости рассчитывается в компьютере данных о воздухе на основе входных данных о температуре и давлении. Хотя индикаторы могут показывать скорость до 0 узлов, отсутствие калибровки ниже указанного диапазона означает, что значения менее 150 узлов неточны. При высоких скоростях изменения воздушной скорости может наблюдаться запаздывание измерений до ±10 узлов. При нормальной эксплуатации может присутствовать ошибка до ±5 узлов. В случае отказа ролики застрянут в своем положении.
Задний индикатор истинной воздушной скорости удалён для установки оборудования DMAS на самолётах с такой конфигурацией; однако TAS предоставляется как функция DMAS.
Индикатор путевой скорости

Индикатор путевой скорости предусмотрен в задней кабине, с диапазоном от 0 до 1999 узлов. Сигнал путевой скорости предоставляется навигационным компьютером, при этом источник зависит от работы INS. Если INS включен, вычисленное значение путевой скорости основано на предоставленной скорости и может отображать правильную информацию до 0 узлов. Когда INS выключен, компьютер данных о воздухе выполняет расчёт, используя введённую экипажем информацию о ветре, что может привести к ошибкам отображения до 150 узлов, когда самолёт находится на земле с включённым стояночным тормозом. В случае отказа ролики застрянут в своем положении.
При установленной DMAS задний индикатор путевой скорости удалён, так как GS является функцией DMAS.
Акселерометры

В обеих кабинах есть акселерометры для контроля перегрузки; акселерометры имеют 3 стрелки - одну для текущей перегрузки, а также стрелки положительной и отрицательной перегрузки для самой высокой перегрузки, обнаруженной с момента сброса акселерометра. Чтобы сбросить прибор, нажмите кнопку PUSH TO SET, чтобы вернуть стрелки записи в положение +1 G.
Индикаторы воздушной скорости/числа Маха

Чисто механические приборы, которые используют полное давление из системы ПВД и статическое давление из компьютера данных о воздухе, предварительно скорректированное компенсатором статического давления, перед отображением на приборе.
Компонент индикатора воздушной скорости этого прибора работает путём измерения динамического давления воздуха, которое представляет собой разницу между полным и статическим давлением. Это динамическое давление тесно связано с квадратом воздушной скорости самолёта. Внутри индикатора находится диафрагма или анероидная капсула, которая реагирует на изменения этого динамического давления. По мере изменения скорости самолёта эта диафрагма соответственно расширяется или сжимается. Эти механические движения затем преобразуются в показания, отображаемые на шкале воздушной скорости, показывая скорость самолёта относительно окружающего его воздуха.
Число Маха определяется аналогично измерению воздушной скорости, в основном путём сравнения динамического и статического давления воздуха. Это сравнение показывает скорость самолёта относительно скорости звука.
В обеих кабинах находится комбинированный индикатор воздушной скорости/числа Маха. Индикаторы имеют фиксированную шкалу воздушной скорости в середине индикатора (
В случае отказа стрелка воздушной скорости и шкала Маха застрянут в своем последнем положении. Среднее время наработки на отказ составляет 1000 часов.
Высотомер

Высотомер типа AAU-19, может работать как в электрическом режиме - на основе скорректированного электрического сигнала статического давления от кодировщика высоты, так и в механическом (STBY) режиме - от компьютера данных о воздухе, предварительно скорректированного компенсатором статического давления. Допуск погрешности прибора составляет ±3 фута при скорости ниже 80 узлов и ±5 футов при скорости выше этой.
В режиме STBY высотомер работает на основе анероидного барометра, имеющего гибкую металлическую капсулу, известную как анероидная пластина. Эта пластина расширяется или сжимается при изменении внешнего давления воздуха. По мере набора высоты самолётом снижение давления воздуха приводит к расширению пластины. И наоборот, во время снижения повышенное давление воздуха приводит к сжатию пластины. Эти механические движения передаются через систему пружин и рычагов, что приводит к движению стрелки и роликов высотомера. Высотомер можно откалибровать по текущему давлению на уровне моря для получения точных показаний высоты.
В основном режиме работы высотомер использует электрический сервомеханизм для достижения точной индикации.
Приборы в обеих кабинах обеспечивают рабочий диапазон от 0 до 80 000 футов. Снаружи индикатора находится шкала со стрелкой (
Общие отказы устройства включают в себя:
- Заедание высотомера: полное повреждение, все показания заморожены.
- Отказ электрического сервопривода: устройство принудительно переводится в режим STBY (давление).
- Заедание стрелки: стрелка остаётся в своем положении.
- Заедание роликов высоты: ролики высоты остаются в своем положении.
- Заедание роликов опорного давления: ролики опорного давления остаются в своем положении.
- Поломка ручки опорного давления: вращение ручки не влияет на устройство.
- Поломка трёхпозиционного переключателя: вращение переключателя не влияет на устройство.
Магнитный компас

Магнитный компас предусмотрен в каждой кабине для использования в случае отказа навигационной или электрической системы.
Из-за своей конструкции компас подвержен нескольким ошибкам. Во-первых, он обладает определённой инерцией, что часто приводит к запаздыванию показаний. В результате часто можно наблюдать колебания стрелки и её качательные движения.
Чтобы поддерживать выравнивание с гравитационным полем Земли, он может вращаться примерно на 10 градусов как по тангажу, так и по крену. Однако, поскольку линии магнитного поля Земли не параллельны её поверхности, стрелка имеет тенденцию немного «опускаться» вверх или вниз к магнитным полюсам. Этот эффект «опускания» вызывает ошибки, особенно заметные во время поворотов и ускорения.
В северном полушарии компас будет отставать при повороте от севера и опережать при повороте к северу. В южном полушарии верно обратное.
При ускорении на восточном или западном курсе в северном полушарии компас ошибочно повернётся к северу, а при замедлении - к югу. В южном полушарии противоположные эффекты возникают во время ускорения и замедления.
Вариометры (VVI)

Индикаторы VVI предусмотрены в обеих кабинах и показывают скорость набора высоты или снижения (в футах в минуту) самолёта, рассчитанную по изменению атмосферного давления с использованием пневматически скорректированного статического давления от компьютера данных о воздухе.
Устройство состоит из диафрагмы, размещённой в герметичном корпусе. Как диафрагма, так и пространство вокруг неё соединены с источником статического давления самолёта. Однако диафрагма спроектирована с калиброванной утечкой, в результате чего давление внутри неё изменяется медленнее, чем давление в окружающей области. Эта преднамеренная задержка приводит к перепаду давления между внутренней и внешней сторонами диафрагмы. VVI преобразует эту разницу давлений в механическое движение стрелки, которая затем отображает скорость набора высоты или снижения самолёта.
Из-за своей конструкции скорость набора высоты или снижения, отображаемая на индикаторе, имеет небольшую задержку по сравнению с фактическим вертикальным движением самолёта. Это запаздывание на F-4 составляет от 4 до 7 секунд. Прибор, который измеряет от -6000 до 6000 футов в минуту, может иметь погрешность положения до 50 футов в минуту, погрешность шкалы до 300 футов в минуту для скоростей, приближающихся к 5000 футов в минуту, и погрешность трения максимум ±150 футов в минуту. В случае отказа индикатор может застрять или одна из его утечек может засориться. Если утечка статического давления заблокирована, стрелка будет постепенно перемещаться к показанию 0 футов в минуту по мере выравнивания давлений и оставаться постоянной. И наоборот, если калиброванная утечка засорена, задержанное давление не изменится, в результате чего стрелка будет двигаться с изменением высоты, подобно высотомеру, но быстро достигнет своих рабочих пределов. Среднее время наработки на отказ для этого прибора составляет 1000 часов.
Радиовысотомер

Радиовысотомер, расположенный в передней кабине, имеет рабочий диапазон от 0 до 5000 футов над уровнем земли. Радиовысотомер работает при крене от 0 до 30 градусов или тангаже от 0 до 35 градусов. Шкала циферблата показывает от 0 до 5000 футов, а система включает в себя красный индикатор предупреждения о малой высоте (
Включение и установка высоты предупреждения радиовысотомера осуществляется одной и той же ручкой (
Указатели поворота и скольжения
| Пилот | WSO |
|---|---|
 |  |
В передней кабине на ADI на панели приборов добавлен указатель поворота и скольжения; хотя стрелка показывает правильное направление поворота, основываясь на сигнале от гироскопа скорости в системе AJB-7, она не предоставляет правильную информацию о скорости поворота.
Обычный 4-минутный указатель поворота и скольжения с собственным обычным горизонтально установленным гироскопом находится на панели задней кабины.
Чтобы выполнить контролируемый поворот (360° за 4 минуты), установите вертикальную стрелку заднего указателя поворота над одной из отметок с любой стороны (скорость поворота 1,5 градуса в секунду) и убедитесь, что индикатор скольжения внизу отцентрирован, чтобы предотвратить чрезмерный или недостаточный поворот из-за неправильного крена.
Авиагоризонт задней кабины

AJB-7 предоставляет информацию об ориентации на авиагоризонт, расположенный на панели приборов задней кабины, независимо от положения переключателя выбора системы отсчёта. Ручка триммера позволяет регулировать сферу ориентации для правильного ориентирования самолёта. Если питание индикатора или AJB-7 отключено, отобразится флажок OFF.
Устройство работает электронным способом и имеет два сервопривода: сервопривод тангажа и сервопривод крена. Индикация тангажа ограничена диапазоном ±90 градусов, в то время как индикация крена позволяет непрерывно двигаться по всему кругу в 360 градусов. В случае отказа сервопривода (со средним временем наработки на отказ 800 часов) неисправный сервопривод застрянет в своем последнем положении или направлении.
Система ПВД

Система ПВД предоставляет полное и статическое давление пилотажным приборам, компьютеру данных о воздухе и переключателям, управляемым воздушной скоростью. Одна трубка ПВД, установленная на самолёте, обеспечивает показания полного давления, в то время как статическое давление измеряется двумя портами статического давления, расположенными на одной штанге на носу самолёта. Как трубка ПВД, так и порты статического давления подвержены засорению из-за скопления льда. Чтобы уменьшить обледенение головки ПВД, на правой консоли передней кабины находится переключатель обогрева ПВД.
🟡 ВНИМАНИЕ: Переключатель обогрева ПВД следует всегда включать перед взлётом, но не более чем на одну минуту, так как это может повредить прибор.
Система компьютера данных о воздухе
Используя различные входные данные о статическом давлении, ориентации и окружающей среде, компьютер данных о воздухе (ADC) предоставляет пневматические и электрические сигналы основным пилотажным приборам, AFCS, системе управления огнём, системе воздухозабора и управляет системой регулируемого входного устройства для двигателей. Полёт в таких погодных условиях, как обледенение или дождь, может привести к ошибкам в работе этих систем до тех пор, пока состояние не улучшится, и это следует учитывать.
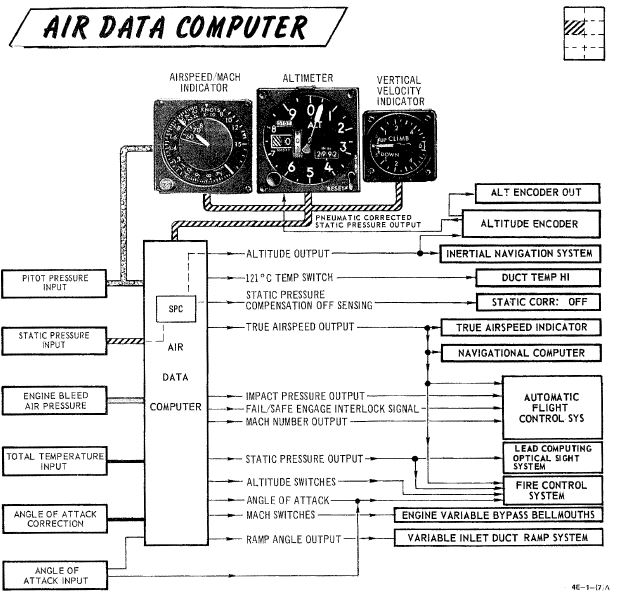
Компенсатор статического давления

Компенсатор статического давления (SPC) выполняет коррекцию запаздывания высотомера, вызванного быстрым изменением высоты. SPC необходимо сбросить после запуска двигателя в каждом полёте; это выполняется с помощью переключателя CADC рядом с РУДами, выбрав RESET CORR, а затем выбрав NORM. Если во время полёта возникнет проблема, вызывающая предупреждение STATIC CORR OFF, можно попытаться сбросить SPC с помощью RESET CORR. Если предупреждение STATIC CORR OFF не исчезнет, будьте осторожны при выполнении всех манёвров пикирования, так как будет наблюдаться значительное запаздывание высотомера.
Индикатор ALT ENCODER OUT
Блок кодирования высоты предоставляет точные (до 100 футов) данные о высоте для IFF для режима C управления воздушным движением, а также выполняет коррекцию относительно пневматического сигнала на высотомере. Если SPC отключён, индикатор ALT ENCODER OUT также загорится, чтобы подтвердить запаздывание работы высотомера и возможные проблемы с режимом C.
Система управления полётом

Основные органы управления полётом самолёта состоят из стабилизатора, руля направления, руля направления и интерцепторов. Системы искусственного ощущения создают имитацию аэродинамических сил на ручке управления и педалях руля направления. Вспомогательные органы управления - это предкрылки/закрылки передней кромки, закрылки задней кромки и установленные на крыльях воздушные тормоза.
Противовесы против сильфонов
Соединения между ручкой, рулевыми поверхностями и взаимодействием с системой триммирования, а также AFCS представляют собой сложную комбинацию сил, которые уравновешивают друг друга.
Противовесы, соединённые с ручкой, увеличивают усилие, необходимое для её перемещения, в зависимости от текущей перегрузки, толкая ручку вперёд. Например, при оттягивании ручки и создании положительной перегрузки противовесы становятся тяжелее, что затрудняет дальнейшее оттягивание и естественным образом приводит к тому, что ручка стремится вернуться в нейтральное положение.
Противовесы уравновешиваются с противоположной стороны системой сильфонов, работающей от давления набегающего воздуха, измеряемого на входе сильфонов на вертикальном оперении.

Сильфоны тянут ручку назад в зависимости от относительной воздушной скорости. Например, когда пилот отпускает ручку, и самолёт непреднамеренно начинает пикировать, воздушная скорость увеличивается, и система сильфонов тянет ручку назад, естественным образом заставляя самолёт набирать высоту и стабилизироваться в горизонтальном полёте.
Триммирование самолёта приводит к изменению длины рычага, соединяющего систему сильфонов с ручкой, изменяя эффективное усилие, которое они могут приложить.
🟡 Засорение или замерзание входа сильфонов приводит к неисправности системы. В этом случае триммирование может стать неэффективным, и могут возникнуть внезапные движения тангажа вверх или вниз, в зависимости от того, как уравновешиваются силы сильфонов и противовесов. Чтобы предотвратить ещё одно внезапное изменение тангажа после устранения засорения, триммер следует держать в нейтральном положении.
Две противодействующие силы тщательно сбалансированы, чтобы удерживать ручку в нейтральном положении во время горизонтального полёта на нормальных скоростях. Однако из-за динамического характера системы самолёт приходится постоянно перетриммировать даже после малейших изменений условий полёта. Особенно при перегрузках или при изменении воздушной скорости ощущение поведения ручки резко меняется.
Ручки управления

РУС предусмотрен в обеих кабинах, с почти одинаковым расположением переключателей. Триммер (
Кроме того, уникальной особенностью ручки передней кабины является датчик усилия, который позволяет пилоту точно регулировать AFCS при включённом автопилоте. В случае, если усилие, приложенное к ручке, превышает предел отключения AFCS, автопилот будет временно отключён.
Системы управления и триммирования элеронов-интерцепторов и стабилизатора
Система управления элеронами-интерцепторами и система управления стабилизатором имеют функцию отслеживания триммирования; первая - через винтовой домкрат, вторая - с помощью сервопривода, управляемого AFCS. Эти функции заставляют ручку занимать положение относительно текущего положения триммера и автопилота, когда управляющий член экипажа отпускает ручку. Поэтому рекомендуется переместить ручку в то же положение или осторожно переместить ручку до «усилия отключения» перед отключением автопилота, чтобы уменьшить вероятность резкого возврата к ручному управлению.
Для подтверждения текущего состояния триммера стабилизатора на левой вертикальной панели передней кабины предусмотрен индикатор положения триммера стабилизатора.

Система управления рулём направления

Управление по оси рыскания осуществляется с помощью педалей руля направления, расположенных в обеих кабинах. Чтобы компенсировать любое относительное скольжение из-за воздействия ветра, дисбаланса боеприпасов или незначительного отклонения мощности двигателя на панели управления двигателем в передней кабине находится переключатель триммера руля направления На земле педали можно нажимать независимо друг от друга для дифференциального торможения, а сама ось руля направления работает как управление направлением носовой стойки шасси, когда нажата кнопка управления носовой стойкой шасси на любой ручке управления.
Взаимосвязь элеронов и руля направления (ARI)
Система ARI (взаимосвязь элеронов и руля направления) вызывает отклонение руля направления пропорционально отклонению элеронов, чтобы обеспечить координированные повороты на малых скоростях. Она включается автоматически, когда переключатель предкрылков/закрылков находится в положении OUT AND DOWN, а воздушная скорость ниже скорости уборки закрылков (230 узлов).
Пределы системы составляют 15° отклонения руля направления, когда система автоматического управления полётом находится в режиме стабилизации или автопилота, и 10° отклонения руля направления, когда переключатель стабилизации рыскания отключён.
Автоматический выключатель ARI расположен справа от кнопки аварийного сброса боеприпасов.

💡 Чтобы полностью отключить ARI, необходимо вытащить автоматический выключатель на левой вспомогательной панели и отключить переключатель Yaw STAB AUG. Вытягивание автоматического выключателя при включённом переключателе всё равно обеспечит 5° отклонения руля направления ARI. Когда автоматический выключатель ARI вытащен, противоскользящая система также отключается.
💡 Рывок руля направления произойдёт, когда система ARI включится или выключится при вводе управляющего сигнала с помощью боковой ручки управления. Обычно это происходит, когда закрылки поднимаются или опускаются во время поворота.
Аварийное отключение
В случае, если на любом управляющем кресле требуется отключить ARI, систему можно отключить, потянув рычаг аварийного быстрого сброса на соответствующей ручке управления. Когда переключатель отпущен, восстанавливается отклонение руля направления ARI (10°) и Yaw STAB AUG (5°). Работу ARI всегда можно переопределить с помощью педалей руля направления.
Система автоматического управления полётом (AFCS) - AN/ASA-32

Система автоматического управления полётом (AFCS) - это электрогидравлическая система, предназначенная для обеспечения стабильных, точных и координированных манёвров полёта без вмешательства в ручное управление. Система автоматического управления полётом способна работать в двух режимах: стабилизации и AFCS.
💡 Термин «AFCS» - это название всей системы, а также её подрежима, в котором удерживается ориентация и/или курс самолёта, и можно активировать удержание высоты.
Стабилизация повышает устойчивость самолёта по тангажу, крену и рысканию. Она противодействует любому изменению ориентации, но не возвращает самолёт к заданной ориентации или путевому углу. Этот режим работы можно использовать, пока самолёт находится под ручным управлением. Стабилизацию можно включать по отдельности или в любой комбинации для осей тангажа, крена или рыскания.
Режим AFCS поддерживает любой курс и/или ориентацию самолёта, выбранные в пределах AFCS, и корректирует любое отклонение от выбранного курса или ориентации самолёта в пределах AFCS. Переключатель AFCS (
Система AFCS может быть включена и удерживать манёвры и ориентацию в диапазоне ±70° тангажа, 70° крена и 360° азимута, при условии, что не превышены ограничения по перегрузке. Быстрые движения стабилизатора, вызванные пилотом или нет, приведут к отключению переключателя AFCS.
Если переключатель AFCS включён, когда самолёт находится на расстоянии менее ±5° от горизонтального положения крыльев, то самолёт будет поддерживать горизонтальное положение крыльев и будет удерживать включённый курс. Когда нажата кнопка управления носовой стойкой шасси (на ручке управления), удержание курса отключается, и становится доступным удержание ориентации. Удержание курса можно восстановить, снова нажав кнопку управления носовой стойкой шасси. Если ориентация самолёта превышает ±5° от горизонтального положения крыльев при включении переключателя AFCS, то самолёт будет поддерживать крен на момент включения.
Режим удержания высоты (
💡 Колебания высотомера при ускорении в трансзвуковом диапазоне (от 0,9 до 1,0 Маха) вызовут переходные колебания, которые, хотя и не являются сильными, могут привести к смещению опорной высоты. Включение режима удержания высоты при наборе высоты со скоростью более 1000 футов в минуту может привести к установке опорной высоты, отличной от высоты включения.
Датчик усилия
Датчик усилия измеряет физическое усилие, приложенное к ручке управления. Этот блок включает в себя видимую часть ручки управления с установленной сверху рукояткой.
Датчик усилия содержит чувствительные к давлению переключатели, которые реагируют на продольные и поперечные усилия на ручку. Поперечное усилие на ручку примерно 1,5 фунта замыкает переключатель усилия. Когда переключатель усилия крена замыкается, сигнал гироскопа скорости крена в режиме STAB AUG и сигналы гироскопа скорости крена и ориентации в режиме AFCS отключаются, чтобы манёвры, инициированные пилотом, не встречали сопротивления в режиме AFCS. Пилот управляет самолётом с помощью механических тяг до тех пор, пока поперечное усилие на ручку не уменьшится до менее чем примерно 1,5 фунта. В это время канал крена возвращается к нормальной работе AFCS.
Усилие на ручку вперёд 3,75 ±0,25 фунта или усилие на ручку назад 2,55 ±0,25 фунта замыкает переключатели для управления определёнными компонентами AFCS и заставляет датчик усилия отправлять сигнал, пропорциональный приложенному усилию на ручку, на сервоусилитель, а положение стабилизатора регулируется через AFCS.
В задней кабине нет датчика усилия на ручку. AFCS и стабилизация крена будут противодействовать вводу управляющих сигналов с помощью ручки задней кабины. Не управляйте самолётом из задней кабины при включённом AFCS. Будьте осторожны при передаче управления между кабинами во время крена с включённой стабилизацией крена.
Акселерометр ограничения перегрузки
Блокировка нормальной перегрузки (отключение по перегрузке) AFCS предназначена для предотвращения того, чтобы система требовала от самолёта чрезмерных перегрузок. Система автоматически переходит из любого включённого режима в режим стабилизации, если переключатель акселерометра отключения по перегрузке обнаруживает +4 или -1 G.
Этот переключатель установлен в передней части перегородки радара, так что если самолёт быстро переводится в манёвр, отключение происходит при более низких значениях нормальной перегрузки из-за упреждения, возникающего в результате того, что переднее расположение воспринимает составляющую ускорения тангажа.
Функция отключения по перегрузке не работает за пределами пределов автопилота ±70°.
🔴 ПРЕДУПРЕЖДЕНИЕ: Переключатель перегрузки не отключает автопилот при низкой воздушной скорости или большой массе до сваливания самолёта. Если автопилот остаётся включённым во время сваливания, автопилот обеспечивает управление, способствующее штопору.
Рычаг аварийного быстрого сброса
На каждой ручке управления находится подпружиненный рычаг аварийного быстрого сброса. Этот рычаг работает одинаково как из передней, так и из задней кабины.
Нажатие на рычаг приводит к возврату переключателя AFCS и переключателя удержания высоты в положение OFF. Режим стабилизации, ARI и противоскользящая система отключаются, пока рычаг удерживается нажатым. Когда рычаг отпущен, стабилизация, противоскользящая система и ARI снова работают, но AFCS больше не включён.
Чтобы полностью отключить режим стабилизации, переключатели стабилизации тангажа, крена и рыскания необходимо установить в положение OFF. Чтобы полностью отключить ARI и противоскользящую систему, переключатель стабилизации рыскания должен быть выключен, а автоматический выключатель ARI на левой вспомогательной панели передней кабины должен быть вытащен.
Индикатор отключения автопилота
На панели сигнальных ламп находится индикатор AUTOPILOT DISENGAGE. После первоначального включения режима AFCS индикатор AUTOPILOT DISENGAGE и индикатор главного предупреждения загораются при отключении AFCS.
Оба индикатора гаснут при нажатии кнопки сброса главного предупреждения. Индикаторы остаются погашенными до тех пор, пока AFCS снова не будет включён и отключён.
Индикатор Pitch Aug Off
Индикатор PITCH AUG OFF на панели сигнальных ламп загорается вместе с индикатором главного предупреждения, когда переключатель стабилизации тангажа не включён, а самолёт находится под напряжением.
Нажатие кнопки сброса главного предупреждения гасит индикатор главного предупреждения. Однако индикатор PITCH AUG OFF остаётся гореть до тех пор, пока не будет включён переключатель стабилизации тангажа.
Автоматическое триммирование тангажа
В AFCS включена функция автоматического триммирования тангажа, которая пытается поддерживать самолёт продольно оттриммированным в соответствии с условиями полёта, наблюдаемыми в режиме AFCS.
Таким образом, предотвращается неоттриммированное состояние (которое не будет обнаружено в режиме автопилота), что гарантирует отсутствие чрезмерных переходных процессов тангажа при отключении автопилота.
Автоматическое триммирование тангажа работает примерно на 40% медленнее, чем обычная система триммирования, что приводит к небольшой задержке после изменения условий полёта, прежде чем базовый самолёт будет правильно оттриммирован. Во время манёвров с управлением с помощью ручки управления автоматическое триммирование не работает. Работу автоматического триммирования можно наблюдать на индикаторе триммера тангажа после изменения условий полёта в режиме AFCS.
Индикатор Autopilot Pitch Trim
Индикатор AUTOPILOT PITCH TRIM на панели сигнальных ламп загорается во время работы AFCS, если автоматическое отслеживание триммера тангажа не работает или значительно отстаёт от манёвров самолёта, вызывая неоттриммированное состояние базового самолёта.
Нормальная работа
- Чтобы включить режим стабилизации, установите переключатели стабилизации тангажа, крена и рыскания в положение ENGAGE.
- Отриммируйте самолёт в режиме стабилизации перед включением режима AFCS.
- Чтобы включить режим AFCS, установите ориентацию самолёта в пределах AFCS. Установите переключатель AFCS в положение ENGAGE.
- Когда требуется режим удержания высоты, установите переключатель удержания высоты в положение ENGAGE.
🔴 ПРЕДУПРЕЖДЕНИЕ: Не пытайтесь изменять тангаж самолёта из задней кабины в режиме AFCS. Поскольку в ручке управления задней кабины нет датчика усилия, приложение усилия приведёт к тому, что триммер тангажа будет бегать вверх и вниз в зависимости от приложенного давления. Если пилот попытается взять управление в этот момент, могут возникнуть сильные переходные процессы.
🔴 ПРЕДУПРЕЖДЕНИЕ: При выборе режима AFCS держите руку на ручке управления, чтобы противодействовать любым резким движениям органов управления в случае неисправности AFCS.
💡 AFCS отключается при нажатии рычага аварийного быстрого сброса на ручке управления. Стабилизация и ARI отключаются, пока рычаг удерживается нажатым, но возвращаются в работу при отпускании рычага.
Меры предосторожности при эксплуатации
Обратная реакция крена
Существует вероятность возникновения состояния, называемого обратной реакцией крена, при работе системы автоматического управления полётом в режиме AFCS. Это состояние возникает нечасто и проявляется только при попытке небольших изменений крена. Обратная реакция крена связана с небольшим неоттриммированным состоянием в поперечном канале и проявляется как медленный крен самолёта в направлении, противоположном усилию на ручку. Если, например, самолёт не оттриммирован по крену влево при включении режима AFCS, обратная реакция крена может возникнуть при приложении усилия на ручку вправо. Ситуация с обратной реакцией крена может быть вызвана использованием кнопки ручного триммирования по крену в режиме AFCS, за которым следует приложение небольшого усилия на ручку в направлении, противоположном направлению триммирования. Существует вероятность возникновения обратной реакции крена, даже если самолёт был оттриммирован перед включением режима AFCS, а кнопка ручного триммирования не использовалась. Это состояние вызвано изменениями триммирования самолёта, сопровождающими изменения условий полёта. Ввиду вышеизложенного следует соблюдать следующие инструкции:
- Отриммируйте самолёт в режиме стабилизации перед включением режима AFCS.
- Не используйте ручной триммер по крену, пока включён режим AFCS. Если обратная реакция крена возникает из-за изменения условий полёта; отключите крен, перетриммируйте, затем снова включите.
Колебания тангажа
При использовании режима удержания высоты самолёт может испытывать колебания тангажа в трансзвуковых областях из-за колебаний в системе воздушной скорости компьютера данных о воздухе. Характер этих колебаний варьируется от покачивания ручки до расходящихся колебаний тангажа. Рекомендуется, если колебания тангажа возникают на трансзвуковых скоростях, попытаться выполнить следующие корректирующие действия:
- Переключатель AFCS - DISENGAGE
- Переключатель компенсатора статического давления - OFF
- Переключатель AFCS - ENGAGE
- Включите режим удержания высоты
Если колебания сохраняются после выполнения вышеуказанных действий или если они возникают на сверхзвуковых скоростях:
- Отключите режим удержания высоты.
🔴 ПРЕДУПРЕЖДЕНИЕ: Не допускайте развития расходящихся колебаний тангажа. Если замечена какая-либо расходящаяся активность тангажа, следует немедленно принять корректирующие меры.
Система предкрылков/закрылков

Система предкрылков/закрылков выбирается вручную для взлёта и посадки, а затем автоматически управляется в зависимости от угла атаки для обеспечения наилучших характеристик управляемости во всех остальных режимах полёта. Управление осуществляется с помощью трёхпозиционного переключателя расположенного снаружи от левой рукоятки РУДв передней кабине, и приводится в действие гидравлической системой самолёта. Три положения переключателя Norm, Out и Out and Down, и результирующая команда может быть изменена в зависимости от того, выпускается ли шасси.

Norm - это стандартное положение в полёте, блокирующее закрылки и автоматически программирующее выпуск предкрылков в зависимости от угла атаки.
Out выпускает предкрылки в полностью выпущенное положение. Если шасси выпущено, будут выпущены как предкрылки, так и закрылки.
Out and Down полностью выпускает как предкрылки, так и закрылки. Если шасси не выпущено, индикатор шасси на панели сигнальных ламп загорится и будет мигать.
В обеих кабинах есть индикатор предкрылков/закрылков, который показывает In и Out, а также диагональные полосы, когда поверхности находятся в процессе перехода.

В положении Norm выпуск манёвренных предкрылков осуществляется в зависимости от угла атаки; выше 11,5 единиц они выпускаются, а затем убираются, когда самолёт замедляется ниже 10,5 единиц. Работа манёвренных предкрылков включает в себя отвод, вызванный скоростью; предкрылки убираются из-за давления воздуха на скорости от 568 до 602 узлов.

В задней части панели управления топливом в передней кабине находится переключатель отключения предкрылков. Этот защищённый переключатель имеет два положения: NORM и IN. По умолчанию установлен в положение NORM под защитой, переключение в положение IN принудительно убирает предкрылки, независимо от текущего угла атаки самолёта или положения переключателя предкрылков/закрылков; это действие включит предупреждение SLATS IN на панели сигнальных ламп и зажжёт индикатор главного предупреждения.
Система предкрылков/закрылков также имеет аварийную систему; ручки находятся на панели управления предкрылками/закрылками в передней кабине и рядом с парой РУДов задней кабины. Аварийная система использует пневматическое давление и не требует электропитания для принудительного выпуска. Аварийная система может работать только один раз и может быть активирована на любой воздушной скорости; однако на скорости выше 230 узлов закрылки убираются из-за давления воздуха, и также применяются нормальные скорости уборки предкрылков.
Воздушные тормоза

Под самолётом и рядом с задними нишами Sparrow расположены воздушные тормоза, установленные на крыльях. Воздушные тормоза приводятся в действие гидравлической системой самолёта и включаются трёхпозиционным переключателем, расположенным на внутренней РУД в обеих кабинах. Любой переключатель приведёт в действие тормоза. Положения: Out, Stop и In; положение Out является кратковременным и возвращается в Stop при отпускании.

Включение тормоза зажигает индикатор Speed Brake Out, расположенный на панели сигнальных ламп. Выпуск тормоза и включение индикатора не вызывают главного предупреждения.

Система угла атаки

Для точного контроля и управления лётными характеристиками самолёта система угла атаки (AoA) обеспечивает визуальное и звуковое подтверждение текущих параметров. В систему входят индикаторы угла атаки, расположенные в обеих кабинах, подсвечиваемые индикаторы угла атаки, а также звуковая система угла атаки.
Угол атаки обычно измеряется в градусах (°). Он представляет собой отклонение от выравнивания хорды самолёта с набегающим воздухом или относительным ветром.
Индикаторы

Шкалы индикаторов угла атаки показывают значения угла атаки от 0 до 30 единиц, с указанием оптимальной высоты крейсерского полёта в зависимости от массы (7,9 единиц), захода на посадку (19,2 единиц) и сваливания (30 единиц).
💡 Индикаторы угла атаки горят только при убранном правом шасси.
Единицы угла атаки не переводятся напрямую в градусы, одна единица угла атаки равна примерно 0,95 градуса, а измеренный угол атаки также смещён примерно на 4 градуса. Таким образом, индикатор отображает более естественное и полезное для экипажа значение.
💡 Выпуск шасси и, следовательно, створки носовой стойки шасси изменяет воздушный поток вокруг датчика, что приводит к увеличению показаний на 1 единицу. Скорости захода на посадку учитывают это. Поэтому выполнение захода на посадку с убранным шасси приведёт к тому, что индикаторы будут показывать примерно на 1 единицу меньше, и самолёт будет примерно на 5 узлов быстрее для захода на посадку на заданной скорости.
Индикаторы

Индикаторы угла атаки, расположенные на раме лобового стекла передней кабины и над панелью приборов в задней кабине, отображают цветную и направленную символику для значения захода на посадку на заданной скорости 19,2 единицы после выпуска шасси.
Звуковая система
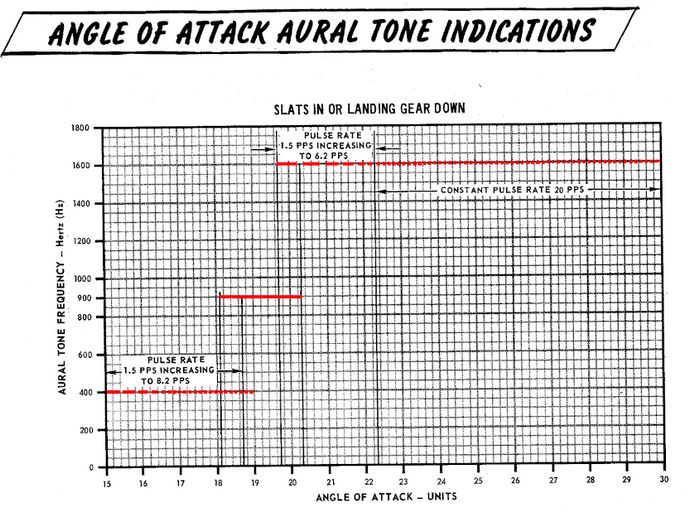
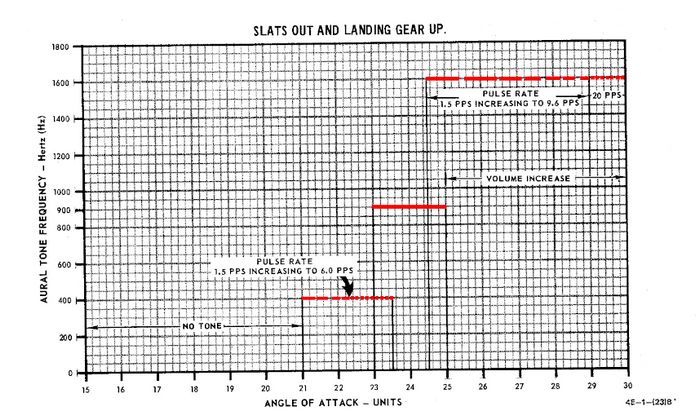
Звуковая система обеспечивает звуковую обратную связь в манёвренном полёте и во время конфигурации посадки. Начиная с угла атаки выше 15 единиц при выпущенном шасси и 21 единицы угла атаки при убранном шасси и убранных предкрылках, оба члена экипажа будут слышать импульс.
Частота импульса может варьироваться от 1,5 до 20 импульсов в секунду, при этом частота увеличивается с увеличением значений угла атаки.
Громкость этого тона можно уменьшить ниже 20,3 единиц угла атаки при выпущенном шасси/25 единиц при убранном шасси с помощью органов управления в каждой кабине; превышение этих значений приведёт к тому, что система переопределит ограничения громкости и будет подавать предупреждающие импульсы с минимальной громкостью, чтобы гарантировать их слышимость независимо от настройки громкости.
💡 Соответствующие ручки имеют надпись STALL WARNING и находятся на правой стороне в каждой кабине. Их не следует путать с ручками AURAL TONE CONTROL, которые управляют тонами, связанными с оружием.
Из-за ограниченной видимости вперёд тоны являются важным подспорьем при посадке. Если слышен низкий тон, воспроизводимый импульсами, самолёт летит слишком быстро. Если слышен высокий тон, воспроизводимый импульсами, самолёт летит слишком медленно. Для правильной конфигурации на заданной скорости воспроизводится постоянный тон средней высоты.
Вибратор предупреждения о сваливании
Левая педаль передней кабины включает в себя вибратор предупреждения о сваливании, который активируется при угле атаки более 22,3 единиц. Эта физическая (и в DCS звуковая) индикация подаётся, чтобы предупредить пилота о возможном сваливании и дать достаточно времени для уменьшения угла атаки и предотвращения потери управления самолётом. Уменьшение угла атаки ниже порогового значения отключит предупреждение.
Система шасси и органы управления на земле
F-4 Phantom использует обычную трёхколёсную схему шасси, приводимую в действие вспомогательной гидравлической системой. Шасси управляется электроникой и приводится в действие гидравлически с помощью вспомогательной гидравлической системы. Случайная уборка шасси, когда самолёт находится на земле, предотвращается предохранительными переключателями на основных стойках шасси. Шасси фиксируется в выпущенном положении внутренними защёлками, для отпускания которых требуется гидравлическое давление. Автоматическое отключение управления носовой стойкой шасси и противоскользящей системы осуществляется с помощью концевых выключателей, расположенных в нишах шасси. В случае отключения вспомогательной гидравлики для выпуска шасси для посадки предусмотрена аварийная система выпуска с использованием сжатого воздуха.
Рычаг управления шасси

Рычаг управления шасси находится на левой панели приборов в передней кабине, с красной ручкой в форме колеса для идентификации.
Аварийные рычаги выпуска шасси

Аварийный выпуск шасси осуществляется с помощью пары баллонов со сжатым воздухом, имеющих достаточный заряд для однократного выпуска шасси. Аварийный выпуск в передней кабине осуществляется с помощью рычага управления шасси; оттягивание рычага назад в любом положении выпускает сжатый воздух в гидравлическую систему шасси, заставляя створки шасси открыться, а шасси выпуститься и зафиксироваться. Выпуск также можно выполнить в аварийной ситуации из заднего сиденья с помощью ручки на левой вспомогательной панели с надписью EMERG LDG GEAR. Вытягивание этой ручки выполняет то же действие, что и оттягивание рычага управления шасси передней кабины назад.
Индикаторы шасси

В левом верхнем углу панели приборов передней кабины находится сигнальная лампа WHEELS, которая загорается, когда самолёт находится на скорости ниже 230 узлов с невыпущенным шасси. Выбор выпуска или уборки шасси при горящей лампе WHEELS приведёт к тому, что сигнальная лампа, установленная на рычаге управления шасси, загорится красным цветом.
Индикаторы положения шасси

Индикаторы состояния системы шасси находятся в обеих кабинах на левой вспомогательной панели. Индикаторы представляют собой три окна, по одному на каждую стойку шасси. Положение шасси отображается в соответствующих окнах словом UP, когда шасси убрано и створки закрыты, диагональными полосами (наклонные белые и чёрные полосы), когда шасси и створки находятся в процессе перехода, закрываясь или открываясь, и изображением колеса, когда шасси выпущено и зафиксировано.
Управление носовой стойкой шасси

Управление носовой стойкой шасси (NGS или также NWS) осуществляется с помощью соответствующей кнопки на ручке управления в любой кабине. Удержание кнопки нажатой позволяет члену экипажа управлять самолётом с помощью педалей руля направления. Предел поворота носовой стойки шасси составляет 70 градусов от центральной линии в обоих направлениях.
Управление рулём направления становится эффективным на скорости примерно 70 узлов. На этой скорости управление носовой стойкой шасси следует отключить и больше не использовать.
Колёсные тормоза
Дифференциальное управление обеспечивается при нагрузке на колёса с помощью отклонения педалей руля направления. Помощь в торможении оказывает встроенная противоскользящая система, которая включается при скорости самолёта более 30 узлов. Противоскользящая система задерживает торможение при посадке до тех пор, пока правая основная стойка шасси не будет касаться земли в течение 3 секунд или колёса не достигнут скорости вращения 50 узлов.
Противоскользящая система
Электронная противоскользящая система обеспечивает защиту от скольжения при скорости вращения колёс более 30 узлов. Система обнаруживает начало скольжения и сбрасывает давление в тормозах пропорционально силе скольжения. На скорости ниже 30 узлов защита от скольжения недоступна, и торможение происходит прямо пропорционально движению педали тормоза. Система имеет встроенную функцию защиты при касании, которая предотвращает торможение до тех пор, пока не пройдёт 3 секунды после того, как нагрузка будет обнаружена на правой основной стойке шасси, или пока скорость вращения колёс не достигнет 50 узлов. Следует отметить, что низкий коэффициент трения между взлётно-посадочной полосой и шинами (как это происходит во время аквапланирования или на обледенелых взлётно-посадочных полосах) может привести к тому, что колёса не будут вращаться или их скорость замедлится ниже 30 узлов после раскрутки. В этом случае система ошибочно определяет скорость самолёта ниже 30 узлов и переходит на ручное торможение.
Переключатель управления противоскользящей системой

Рядом с индикатором количества кислорода в передней кабине находится переключатель управления противоскользящей системой, который используется для включения или выключения системы.
Индикатор неисправности противоскользящей системы

Индикатор ANTI-SKID INOPERATIVE, расположенный на левой консоли передней кабины, загорится, когда переключатель противоскользящей системы установлен в положение OFF, нажат рычаг аварийного быстрого сброса или возникла проблема с системой.
Рычаг аварийного быстрого сброса

Если противоскользящая система неисправна во время пробега, её можно немедленно отключить, удерживая нажатым рычаг быстрого сброса, расположенный на ручках управления в любой кабине. Это включит предупреждение ANTI-SKID INOPERATIVE.
Аварийная гидравлическая тормозная система

В случае отказа вспомогательной гидравлической системы аварийное дифференциальное торможение обеспечивается путём вытягивания рычага аварийного тормоза в левой нижней части панели приборов в любой кабине. Это принудительно подаёт гидравлическое давление из резервного аккумулятора и обеспечивает достаточную мощность примерно для 10 торможений.
Система тормозного крюка

Фантом оснащён убирающимся тормозным крюком для остановки на земле в аварийных ситуациях при взлёте и посадке, которые приведут к выкатыванию за пределы полосы. Установка рычага тормозного крюка в передней кабине в положение DOWN опустит крюк примерно за пять секунд. Опускание крюка включит красный индикатор на ручке крюка и зажжёт предупреждение HOOK DOWN на панели сигнальных ламп.
Система не предназначена для использования при эксплуатации с авианосцев.

Система тормозного парашюта

F-4E имеет тормозной парашют для сокращения пробега при посадке по мере необходимости. Парашют также можно использовать для вывода из штопора. Выпуск парашюта осуществляется путём поворота ручки, расположенной в передней кабине. Парашют вытягивается из своей ниши с помощью меньшего вытяжного парашюта. Как только парашют выпущен и выполнил достаточное торможение или самолёт вернулся в управляемое состояние, парашют отсоединяется нажатием кнопки и оттягиванием ручки назад, а затем опусканием её. Это действие отпускает тросы парашюта и позволяет ему отделиться.
Не используйте парашют на скорости более 200 узлов IAS при посадке.
Для вывода из штопора парашют можно использовать, полностью нажав ручку вперёд, установив элероны и руль направления в нейтральное положение и выпустив парашют.
💡 Тормозной парашют не следует сбрасывать на взлётно-посадочной полосе или рулёжной дорожке. Популярный метод - оставить его сбоку от рулёжной дорожки, соответствующим образом ориентировав самолёт, надув парашют двигателями, а затем отпустив его в нужном направлении.

Система складывания крыльев

F-4E имеет систему складывания крыльев, которая помогает при обслуживании и наземном обслуживании. В отличие от предыдущих моделей, механизм складывания крыльев на F-4E не имеет привода и требует от членов наземного экипажа ручного перемещения внешних панелей при активированном управлении складыванием, чтобы отпустить фиксирующий механизм.
Двигатели и топливная система
"Эта малышка полетит, и старый Дымок её не догонит, потому что у неё внутри есть новейший радар-детектор. Сейчас это нелегально во всех странах, но я вам скажу, что Кэл не расскажет, нет, сэр."
F-4E Phantom II оснащён двумя двигателями General Electric J79-GE-17A/F. Для запуска двигателя используется турбостартер, работающий от внешнего воздуха или расширяющихся газов твердотопливного пускового патрона.

Он также имеет внутреннюю топливную систему, состоящую из соединённых между собой баков в фюзеляже и двух внутренних баков крыла. Внешнее топливо можно перевозить в двух установленных на крыльях баках объёмом 370 галлонов и одном баке объёмом 600 галлонов, установленном на фюзеляже.

Двигатели
 Корейские специалисты и техники по обслуживанию ВВС снимают двигатель с самолёта F-4 Phantom II на ремонтном депо F-4
Корейские специалисты и техники по обслуживанию ВВС снимают двигатель с самолёта F-4 Phantom II на ремонтном депо F-4
F-4E Phantom оснащён двумя двигателями J79-GE-17, построенными General Electric, с номинальной статической тягой на уровне моря 11 870 фунтов на тяге Mil и 17 900 фунтов на форсаже. Двигатели имеют возможность как запуска с помощью пневматической системы на аэродромах с доступной тележкой, так и с помощью пускового патрона для запуска вращения. Аналогичным образом, двигатели могут использовать внутренний аккумулятор самолёта для начального питания или подключение к внешней тележке питания.
💡 Когда двигатели выключены, они издают дребезжащий звук, так как лопатки дребезжат в своих держателях. Это называется вращением от набегающего потока.
Топливомеры

Для каждого двигателя предусмотрен топливомер, расположенный на приборной панели передней кабины.
Индикаторы показывают расход в тысячах фунтов в час, от 0 до 12. Индикаторы показывают расход до тяги Mil; при включении форсажа используется отдельная система подачи топлива, которая подаёт топливо непосредственно на ступень форсажа, и расход примерно в 4 раза превышает отображаемое значение. Скорость двигателя также регулируется расходом топлива, поэтому изменение расхода топлива можно непосредственно наблюдать при перемещении РУДов.
Расход топлива не должен превышать 1200 фунтов в час при запуске и от 800 до 1500 фунтов в час на холостом ходу. Расход топлива на запуск двигателя составляет примерно 65 фунтов на двигатель.
Масляная система
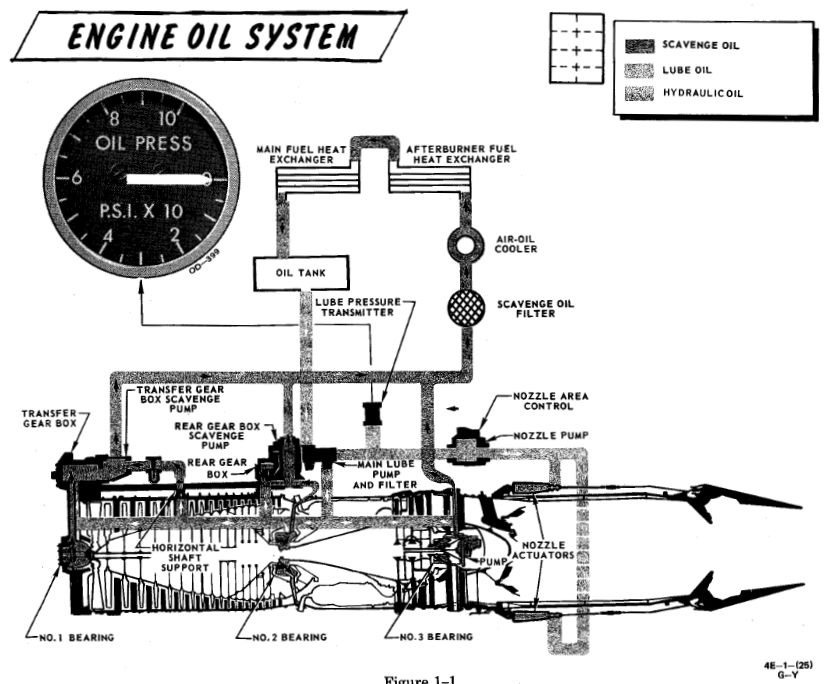
Каждый двигатель оснащён полностью автономной масляной системой с сухим картером и полным давлением. Подача масла в систему смазки прерывается во время полёта с отрицательной перегрузкой из-за неспособности откачивающих насосов собирать масло из картеров и редукторов. Масляная система двигателя используется для смазки, позиционирования регулируемого сопла и работы блока постоянной скорости. Переливные трубы, которые подают масло в три системы, использующие масло двигателя, находятся в резервуаре таким образом, что труба для блока постоянной скорости находится выше всех, труба для управления соплом - следующая по высоте, а труба системы смазки - самая низкая. Такое расположение предназначено для предотвращения критического отказа системы, если одна из цепей протекает. Если утечка произойдёт в блоке постоянной скорости, это, вероятно, приведёт к отказу только этой системы, в то время как утечка в системе управления соплом может привести к отказу этой системы и блока постоянной скорости. Масло также подаётся непосредственно из резервуара в блок постоянной скорости, где оно используется как в качестве управляющей, так и в качестве конечной приводной среды для регулирования скорости генератора. Смазочный элемент масляного насоса подаёт масло для охлаждения и смазки подшипников, шестерён и других трущихся или движущихся частей двигателя. Смазочное масло также циркулирует через генератор с приводом от двигателя для целей охлаждения.
Индикаторы давления масла

Индикаторы давления масла расположены на панели пьедестала передней кабины и откалиброваны от 0 до 100 фунтов на квадратный дюйм. Важные значения:
- 12 фунтов на квадратный дюйм - минимум на холостом ходу
- 30-60 фунтов на квадратный дюйм - в полёте на тяге MIL
- 35 фунтов на квадратный дюйм - статический минимум на тяге MIL
- 60 фунтов на квадратный дюйм - максимум
Регулируемый входной канал
Оптимизация подачи воздуха в двигатели осуществляется системой регулируемого входного канала, управляемой автоматическим управлением каналом (ADC); эта оптимизация использует пару регулируемых клиньев для замедления поступающего воздуха до дозвуковой скорости для обеспечения наилучших характеристик двигателя. В случае превышения пределов температуры на входе загорится индикатор высокой температуры канала (DUCT TEMP HI) на панели сигнальных ламп. Если проблема не будет устранена, это может привести к необратимому повреждению двигателя.
Система запуска
Запуск в пневматическом режиме

Пневматический режим является основным режимом запуска для всех нормальных и штатных операций. В этом режиме Фантом использует вспомогательную тележку запуска, которая вращает турбостартер, запуская двигатель.
Тележкой управляет начальник экипажа, см. главу «Наземный персонал» для получения дополнительной информации о том, как взаимодействовать и запрашивать подачу воздуха.
Запуск в режиме патрона

Режим патрона считается альтернативным методом запуска, предусмотренным для эксплуатационных и аварийных нужд. Для запуска турбостартера, который, в свою очередь, запускает двигатель, используется пусковой заряд. Зажигание патрона управляется переключателем запуска двигателя, при условии, что главный переключатель соответствующего двигателя включён.
💡 Чтобы избежать возможного раздражения, вызванного дымом/газами выхлопа патрона, может быть целесообразно закрыть фонари и выбрать 100% кислород во время цикла запуска.
Патроны может установить начальник экипажа, см. главу «Наземный персонал», чтобы узнать, как взаимодействовать и запрашивать установку патронов.
🔴 ПРЕДУПРЕЖДЕНИЕ: Патроны являются взрывоопасными и, если они не выстрелили, их необходимо удалить. Ни при каких обстоятельствах самолёт не должен летать с невыстрелившими патронами в стартере.
Переключатель запуска

Используется только для запуска от патрона, выбор L или R поджигает патрон, установленный для соответствующего двигателя.
Система зажигания

Двигатель -17E/G оснащён одним блоком зажигания низкой энергии 28 В и одним блоком зажигания высокой энергии 28 В, который улучшает запуск на земле в холодную погоду и запуск в воздухе с использованием альтернативного топлива. Основная система зажигания создаёт электрическую дугу, которая поджигает распылённую топливно-воздушную смесь в четвёртой и пятой камерах сгорания. Остальные восемь камер сгорания поджигаются через перекрёстные трубки. Нажатие кнопки зажигания приводит к разряду свечей зажигания, поджигая топливно-воздушную смесь, когда РУД перемещается из OFF в IDLE во время запуска двигателя. Свечи зажигания срабатывают только при удержании подпружиненной кнопки зажигания.
Система зажигания форсажа
Система зажигания форсажа состоит из запальника, свечи зажигания и переключателя зажигания форсажа. Когда РУД перемещается в положение форсажа, переключатель зажигания форсажа замыкается, и свеча зажигания подаёт непрерывную дугу. Подача топлива на зажигание и запальник поддерживается до тех пор, пока РУД не будет выведен из положения форсажа.
Система противообледенения двигателя
С помощью переключателя противообледенения, установленного в положение DE-ICE, отбираемый воздух из 17-й ступени распределяется по каналам, установленным в области передней части компрессора двигателей. Эта система не выполняет функции удаления льда, а должна быть активирована до образования льда. Поскольку высокие скорости полёта обеспечивают достаточное трение воздуха для предотвращения обледенения на ступени компрессора, использование системы противообледенения не требуется и может привести к повреждению двигателя.
Систему следует включать в турбулентном воздухе и грозах или при повышении температуры выхлопных газов, замеченном пилотом, так как это указывает на обледенение двигателя.
Индикаторы противообледенения

Включение системы противообледенения зажжёт два индикатора на панели сигнальных ламп, L ANTI-ICE On и R ANTI-ICE On. Отказ системы противообледенения при установке переключателя противообледенения в положение NORMAL также зажжёт эти индикаторы на панели сигнальных ламп в качестве предупреждения. Если самолёт находится на скорости выше 1,2 Маха, когда это происходит, необходимо немедленно снизить скорость, чтобы предотвратить потерю двигателя. Из-за предупреждающей функции индикаторов ANTI-ICE ON состояние, которое их зажигает, вызовет предупреждение MASTER CAUTION.
Органы управления и индикаторы
Блок управления соплом двигателя
Положение РУД, обратная связь о положении сопла и температура выхлопных газов используются для планирования правильной площади сопла. Во время работы двигателя в области ниже тяги Mil площадь сопла в основном зависит от угла РУД и обратной связи о положении сопла. Сопло запрограммировано открываться примерно на 7/8 на холостом ходу, и площадь уменьшается по мере продвижения РУД к положению тяги Mil. Однако во время быстрого увеличения тяги с оборотов ниже 79% до 98% управляющий генератор переменного тока подаёт информацию о скорости двигателя на усилитель температуры, который, в свою очередь, планирует входные данные о скорости двигателя в зависимости от ограничения температуры. Этот сигнал предотвращает закрытие основного сопла за пределы заданного положения, позволяя быстро увеличить обороты двигателя, что может привести к его повреждению. Во время работы двигателя в области тяги Mil и форсажа необходимо ограничить график сопла, установленный углом РУД и обратной связью о положении сопла, чтобы предотвратить превышение температуры выхлопных газов проектных пределов двигателя и его повреждение.
Индикаторы положения сопла

Управляемые блоком управления соплом двигателя, парные основное (сходящееся, внутреннее сопло) и вторичное (расходящееся, внешнее сопло) приводятся в действие независимо по графику, чтобы максимизировать производительность на выходе по сравнению с температурой выхлопных газов. На холостом ходу сопло двигателя будет открыто примерно на 7/8, уменьшаясь в размере по мере приближения РУД к MIL. Во время работы в областях MIL и AB блок управления регулирует размер сопла относительно положения РУД и полученной EGT для поддержания температуры в пределах проектного предела.
Для контроля текущего положения сопел относительно друг друга, а также EGT, предусмотрен индикатор с калибровкой от CLOSE до OPEN с четырьмя делениями. Индикаторы сопла позволяют пилоту сравнивать положение сопла между двигателями, а также используются для установления связи между положением сопла и температурой выхлопных газов, а также положением сопла и настройками РУД.
Нормальные настройки: OPEN при выключенных двигателях до IDLE, от 3/4 до 1/2 при двигателях на IDLE и 1/4 для тяги MIL. Тяга MAX не изменит показания индикатора.
Главные переключатели двигателя

Пара двухпозиционных главных переключателей двигателя находится на левой консоли передней кабины на внутренней панели управления двигателем. Выбор ON подаёт питание на топливные насосы наддува и перекачки соответствующего двигателя; это произойдёт независимо от того, подключён ли самолёт к внешнему вспомогательному питанию или нет, так как это подключит аккумулятор самолёта к цепям насосов.
Поскольку главные переключатели двигателя включают топливные запорные клапаны, для правильного выключения двигателей без внешнего питания необходимо вернуть РУДы в положение отсечки перед выключением главных переключателей двигателя, иначе клапаны останутся открытыми.
РУДы

В обеих кабинах предусмотрены парные РУДы для управления тягой двигателя. При нормальном использовании перемещение РУДов из IDLE в OFF выполнит отсечку топлива; чтобы предотвратить случайное выключение двигателя, предусмотрена пара подъёмных рычагов (
РУДы задней кабины соединены с РУДами передней кабины таким образом, что только пилот может запускать двигатели или входить в диапазон форсажа; WSO может уменьшить тягу, выведя РУДы из области форсажа обратно в область MIL и ниже. Хотя задние РУДы можно переместить из OFF без помощи пилота, для возврата в OFF для выключения требуется, чтобы пилот задействовал подъёмные рычаги.
В случае противодействующих команд на рычагах РУД между креслами задние РУДы будут отключены от передних РУДов, чтобы предотвратить повреждение тяги. Это состояние может привести к снижению мощности форсажа от пары передних РУДов. Сброс тяги РУД осуществляется путём установки передних РУДов в положение IDLE или MIL и перемещения задних РУДов в направлении, противоположном тому, в котором произошло отключение.
На задних РУДах есть только кнопка микрофона и переключатель воздушного тормоза.
Тахометры

Для обоих двигателей предусмотрены тахометры на правой стороне панели приборов передней кабины и на правой стороне панели приборов задней кабины. Тахометры будут работать без внешнего питания.
Индикаторы температуры выхлопных газов

Индикаторы температуры выхлопных газов расположены на панели приборов передней кабины. Индикаторы имеют по две стрелки: большую стрелку для шкалы от 0 до 12, показывающую сотни градусов Цельсия, и меньшую стрелку на отдельной шкале от 0 до 10, показывающую десятки градусов Цельсия. Измерение этих значений выполняется на выходе из турбины. При нормальной эксплуатации температура выхлопных газов не должна быть ниже 250°C и не должна превышать 740°C. Если возникает перегрев, РУД следует вернуть в положение OFF. Если это невозможно, следует выключить главный переключатель соответствующего двигателя.
Топливная система
Топливная система Фантома продублирована; то есть её схема насосов и подачи одинакова для левого и правого двигателей, и они используют один и тот же набор топливных баков. Внутреннее топливо фюзеляжа во всех 7 баках и баках крыла составляет чуть более 12 000 фунтов JP-4. С двумя внешними баками крыла объёмом 370 галлонов это значение увеличивается до более чем 16 800 фунтов. Добавление центрального бака объёмом 600 галлонов доведёт общее количество топлива самолёта до чуть менее 20 800 фунтов.
Последовательность перекачки
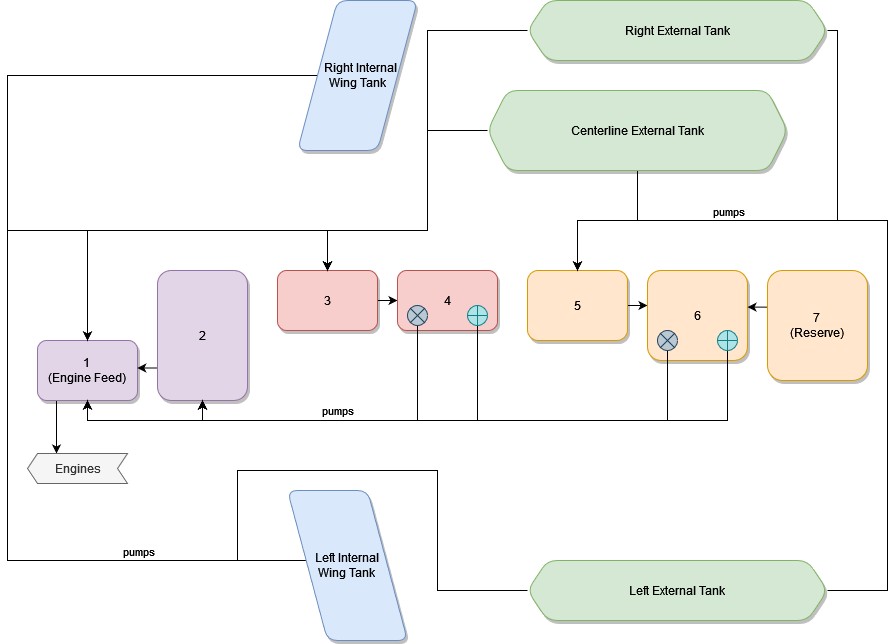
F-4 имеет два внутренних бака в крыльях, а также семь топливных баков по всей длине фюзеляжа, причём бак 1 находится сразу за задней кабиной, а остальные баки пронумерованы по порядку к хвосту самолёта. Бак 1 является расходным баком для двигателей; баки 4 и 6 имеют гидравлический и электрический насосы перекачки для подачи топлива в баки 1 и 2. Остальные баки фюзеляжа подают топливо в баки 1, 4 или 6 самотёком. Бак 2 подаёт топливо в бак 1, бак 3 подаёт топливо в бак 4; а бак 5, а также бак 7 подают топливо в бак 6. Благодаря такой схеме балансировка центра тяжести поддерживается вдоль центральной линии. Бак 7 является последним баком, который запускает перекачку в последовательности, и не начинает её до тех пор, пока общее количество топлива в баках 1 и 2 не упадёт ниже 1800 фунтов.
Перекачка топлива из баков крыла и внешних баков осуществляется путём наддува отбираемым воздухом после взлёта. Топливо из внутренних баков крыла перекачивается в баки фюзеляжа 1 и 3, в то время как топливо из внешних баков распределяется между баками 1, 3 и 5.
💡 Внутренние баки крыла и внешние баки не будут перекачивать топливо, если они не находятся под давлением. Это происходит, когда шасси выпущено или дверца дозаправки топливом в воздухе открыта.
Когда самолёт достигает низкого уровня топлива, активируется автоматическая перекачка топлива, принудительно открывая клапаны внутренних баков крыла и внешних баков независимо от того, что выбрано на панели.
💡 Автоматическую перекачку топлива после её активации можно отключить только путём переключения переключателя дозаправки топливом в воздухе. Это важно, так как большинство переключателей на панели топливной системы игнорируются, пока она активна. Признаком того, что автоматическая перекачка активна, является то, что все три индикатора топлива внешних баков горят независимо от их фактического состояния.
Переключатель перекачки топлива из внутренних баков крыла

При необходимости можно отключить перекачку из внутренних баков крыла с помощью двухпозиционного переключателя. Переключатель перекачки топлива из внутренних баков крыла, расположенный на панели управления топливом, можно переключать между NORMAL и STOP TRANS.
Переключатель внешней перекачки

Внешней перекачкой управляет переключатель внешней перекачки; этот переключатель, расположенный на панели управления топливом, имеет три положения: CENTER, OFF и OUTBD (внешние), причём OUTBD относится к внешним бакам крыла.
Невозможно перекачивать топливо из баков крыла и внешних баков одновременно. Если выбраны оба варианта, приоритет будут иметь внешние баки.
Система топливного наддува

Подача топлива из бака 1 в двигатели осуществляется парой насосов наддува. Насосы установлены в нижней части бака для подачи топлива в случае отрицательной перегрузки. Работу этих насосов можно проверить на индикаторах давления топливного насоса наддува, расположенных в передней кабине. Расход насоса на холостом ходу двигателя составляет 30 фунтов на квадратный дюйм ±5 фунтов. Для проверки на земле на панели управления топливом есть пара переключателей проверки насоса наддува. Удержание одного из этих переключателей в положении CHECK выполнит отключение двигателя из-за открытия запорного клапана и предоставит обратную связь на соответствующем индикаторе давления.
Система индикации количества топлива
Индикатор низкого уровня топлива
Когда датчик в баке 2 обнаруживает массу топлива менее 1650 ±200 фунтов, на панели сигнальных ламп передней кабины загорится предупреждение FUEL LEVEL LOW. Это включение не зависит от системы индикации количества топлива и может указывать на отказ перекачки.
Индикаторы топлива внешних баков

Каждый раз, когда обнаруживается, что внешний топливный бак не подаёт топливо в фюзеляж, на панели сигнальных ламп загорается соответствующий индикатор - L EXT FUEL, CTR EXT FUEL или R EXT FUEL. Эти индикаторы будут загораться только для соответствующей внешней перекачки - то есть, если выбрано OUTBD, CTR EXT FUEL не может загореться, и наоборот. Поскольку перекачка может происходить периодически из-за того, что расход топлива из баков превышает расход топлива двигателем, сигнальная лампа не сразу указывает на пустой внешний бак, и её следует проверить по системе индикации количества топлива.
💡 Хорошим общим признаком того, что баки пусты, является то, что общий счётчик топлива показывает значение ниже 11 000 фунтов. Для подтверждения летите спокойно и ровно и наблюдайте, горит ли индикатор и не увеличиваются ли показания топливомера в течение как минимум одной или двух минут.
Кроме того, индикаторы загорятся, когда переключатель дозаправки топливом в воздухе установлен в положение EXTEND, а для дозаправки выбрано ALL TANKS, что приводит к открытию клапанов внешних баков, не позволяя при этом подавать топливо из них.
Также индикаторы загорятся, когда топливо будет на исходе, и самолёт активирует автоматическую перекачку топлива, принудительно открывая клапаны.
💡 Система не знает о фактической загрузке внешних баков. Индикаторы просто связаны с открытием соответствующего топливного клапана и отсутствием обнаружения потока топлива. То есть, даже если лететь без внешних баков, все три индикатора загорятся, когда самолёт откроет соответствующие клапаны во время дозаправки топливом в воздухе или автоматической перекачки топлива.
При дозаправке топливом в воздухе или при заправке на земле, когда баки заполнены, загорятся индикаторы External Tanks Full, расположенные под дугой фонаря.
Система дозаправки топливом в воздухе

Для дозаправки топливом в воздухе F-4E использует систему приёмника, совместимую с дозаправкой топливом под высоким давлением с помощью штанги в стиле ВВС США. С помощью этой системы топливо может подаваться в Фантом со скоростью до 3900 фунтов в минуту. Принимаемое топливо подаётся в бак фюзеляжа 2, а затем распределяется по остальным бакам самолёта, бакам крыла и, если они установлены и выбраны, внешним бакам.
💡 Хотя максимальная поддерживаемая скорость дозаправки составляет около 3900 фунтов в минуту, фактическая скорость на практике очень динамична и зависит от баков, которые ещё могут принимать топливо. Скорость дозаправки ограничена схемой трубопроводов и их размерами. Например, если останутся только левый и правый внешние баки, скорость дозаправки составит скорее 1400 фунтов в минуту. Дозаправка внутренних баков 1-7 занимает около одной-двух минут. Заполнение баков крыла и внешних баков займёт ещё четыре-пять минут.
| Диапазон штанги | Отметки штанги |
|---|---|
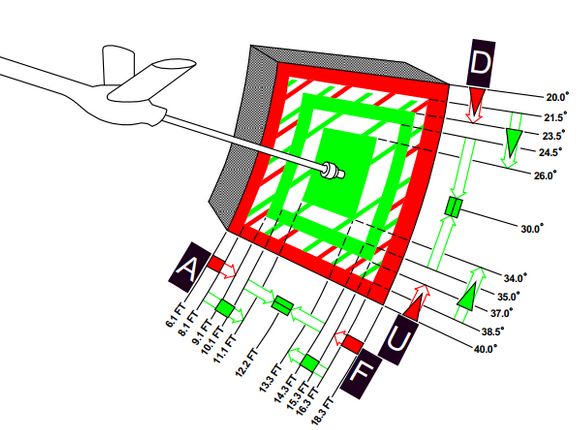 | 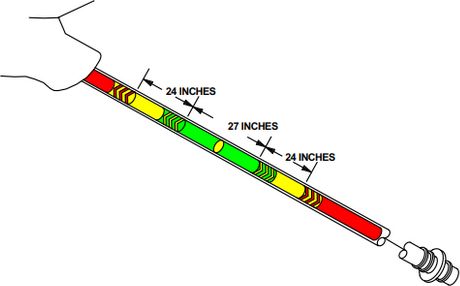 |
💡 Полная дозаправка занимает примерно от одной до трёх минут.

Переключатель дозаправки топливом в воздухе
Подготовка к дозаправке топливом в воздухе осуществляется путём переключения переключателя дозаправки топливом в воздухе
(
Если во время дозаправки топливом в воздухе штанга отсоединяется и загорается индикатор DISENGAGED, этот переключатель необходимо перевести в положение RETRACT, а затем обратно в EXTEND, чтобы сбросить систему и снова подключить штангу.
Переключатель выбора дозаправки
Двухпозиционный переключатель выбора дозаправки (
Индикатор Ready

Когда приёмник выдвинут, а давление в баках сброшено, индикатор READY загорается, чтобы уведомить пилота о том, что дозаправка может начаться. Индикатор погаснет, когда штанга будет подключена к приёмнику или приёмник будет опущен командой RETRACT на переключателе дозаправки топливом в воздухе.
Индикатор Disengaged
Если штанга отсоединится от приёмника, загорится индикатор DISENGAGED. В случае сигнала DISENGAGED систему необходимо сбросить, чтобы продолжить дозаправку. Систему необходимо сбросить путём переключения переключателя дозаправки топливом в воздухе.
Кнопка сброса дозаправки топливом в воздухе

На ручке управления переднего сиденья находится кнопка сброса дозаправки топливом в воздухе. Её основное назначение - отсоединить приёмник от штанги в случае ручного цикла дозаправки (когда оператор штанги не может принудительно отключить её дистанционно) или выполнить отсоединение по требованию в зависимости от условий полёта или аварийной ситуации. Нажатие кнопки отсоединит штангу и зажжёт индикатор DISENGAGED.
Автоматический выключатель AIR REFUEL RECPT

В случае ситуации DISENGAGED во время дозаправки топливом в воздухе система сбрасывается либо путём переключения переключателя дозаправки топливом в воздухе, либо с помощью автоматического выключателя AIR REFUEL RECPT, расположенного на панели автоматических выключателей № 2 в задней кабине - правая сторона, четвёртый столбец, верхний выключатель.
Индикаторы External Tanks Full
Три индикатора - L.H. FULL, CTR. FULL и R.H. FULL (левый, центральный, правый) - подтверждают, что внешние баки были заполнены во время дозаправки топливом в воздухе. Индикаторы будут гореть до тех пор, пока приёмник дозаправки топливом в воздухе не будет убран.
Система сброса топлива

Топливо из крыльев можно сбросить напрямую, не перекачивая его в фюзеляж, с помощью переключателя сброса топлива из крыльев.
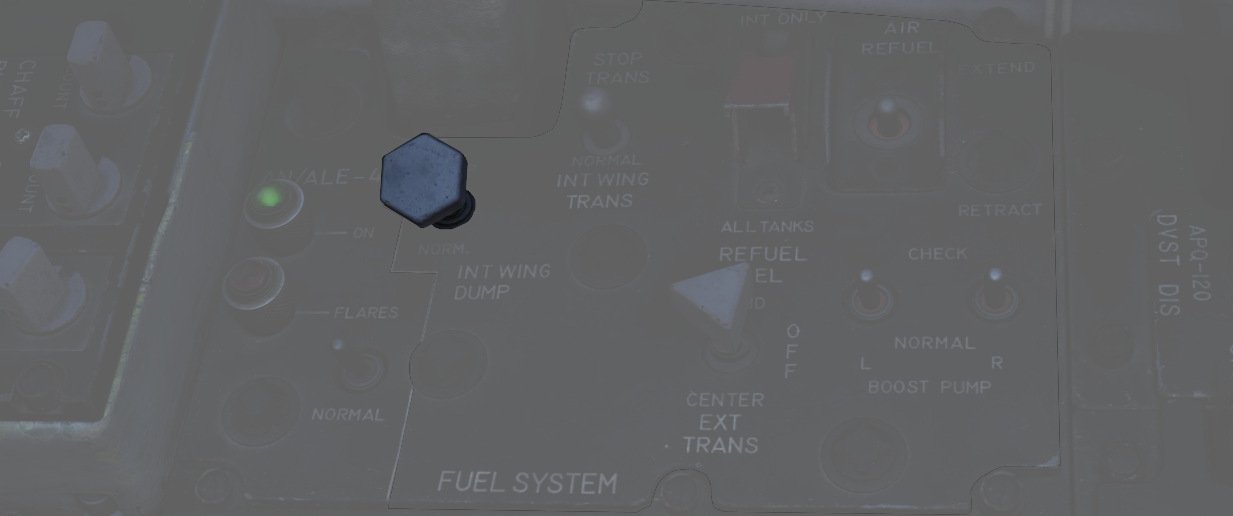
Этот переключатель, когда он установлен в положение DUMP, будет сбрасывать топливо из внутренних баков крыла через сбросные линии на задней кромке складного крыла. Скорость потока зависит от настройки мощности и ориентации, более высокие обороты двигателя и положительный тангаж увеличивают скорость сброса, в то время как более низкие обороты и отрицательный тангаж уменьшают скорость сброса.
💡 В горизонтальном полёте на 85% оборотов двигателя скорость сброса составляет примерно 650 фунтов в минуту. Это приводит к тому, что всё топливо сбрасывается примерно через 15 минут.
Система вентиляции топлива
Чтобы предотвратить проблемы с избыточным давлением, самолёт оснащён системой вентиляции.
Если возникнет избыточное давление, баки будут выпускать топливо до тех пор, пока давление не будет скорректировано.
Процесс полностью автоматизирован. Внешние баки крыла выпускают топливо через систему сброса топлива, а все остальные баки соединены с вентиляционной мачтой под рулём направления.
💡 В нормальных условиях избыточное давление возникает только на короткое время, когда внутренние баки крыла находятся под давлением и готовы к перекачке. Это происходит, когда шасси убрано или дверца дозаправки топливом в воздухе закрыта.

💡 Вентиляция топлива также может происходить при медленном полёте в перевёрнутом положении из-за сильных отрицательных перегрузок. Это часто можно увидеть во время выполнения фигур высшего пилотажа.
Навигация и связь
Инерциальная навигационная система (INS) AN/ASN-63 предоставляет экипажу F-4E и интегрированной системе сброса оружия точную информацию о местоположении, скорости, ориентации и курсе в режиме реального времени.
Система связи UHF в самолёте модифицирована для поддержки как зашифрованной, так и обычной голосовой передачи и приёма. Система внутренней связи и приёмопередатчик UHF адаптированы для эксплуатационной совместимости с блоком защиты речи KY-28.
Всенаправленная радиомаячная система посадки по приборам (VOR/ILS) предоставляет точную информацию о пеленге и отклонении от курса через наземный передатчик станции. Эта система позволяет самолёту использовать возможности точного захода на посадку и снижения на аэродромах, оборудованных локализатором.
Система тактической воздушной навигации (TACAN) предоставляет информацию о пеленге и дальности до передающих станций, с дальностью приёма до 390 миль от наземных станций и 200 миль для самолётов, оборудованных TACAN "воздух-воздух".
 Капитан Марк Райт, пилот F-4E Phantom II из 336-й тактической истребительной эскадрильи, изучает карту во время учений Crested Cap
Капитан Марк Райт, пилот F-4E Phantom II из 336-й тактической истребительной эскадрильи, изучает карту во время учений Crested Cap
Группа директорного управления

Точная навигация по курсу обеспечивается группой директорного управления, которая включает в себя компьютер директорного управления (

Панель выбора навигационной функции

Панель выбора навигационной функции, расположенная на панели приборов передней кабины, имеет две ручки - ручку выбора пеленга/расстояния и ручку выбора режима. На ручке выбора режима установлен переключатель директорного управления.
Ручка выбора пеленга/расстояния (BRG/DIST)
Ручка выбора пеленга/расстояния (
В режиме VOR/TAC на указатель пеленга и индикатор дальности HSI подаются магнитный и относительный пеленг на станцию VOR и дальность до станции TACAN.
В режиме TAC отображаются магнитный и относительный пеленг и дальность до выбранной станции TACAN.
В режиме ADF/TAC отображаются магнитный и относительный пеленг на выбранную станцию ADF и дальность до станции TACAN.
А в режиме NAV COMP отображаются магнитный и относительный пеленг и дальность до пункта назначения, установленного в навигационном компьютере.
Ручка выбора режима (MODE) и переключатель директорного управления
Ручка выбора режима (
Переключатель директорного управления включает/выключает сигналы наведения по тангажу и крену компьютера директорного управления, видимые на ADI. Выбор OFF убирает эти полосы с экрана.
В режиме VOR/ILS, если выбрана частота VOR, ручка установки курса HSI используется для установки радиала VOR. После установки индикатор отклонения HSI показывает текущее отклонение от выбранного курса. Если была выбрана частота ILS, сигнал локализатора будет отображаться на индикаторе отклонения.
Режим TACAN представляет навигационную информацию до текущего выбранного маяка TACAN. Чтобы получить полную информацию, переключатель пеленга/расстояния должен быть установлен в положение TAC. Стрелка курса и окно выбора курса HSI устанавливаются с помощью ручки установки курса на желаемый курс TACAN. После установки индикатор отклонения HSI и символ самолёта обеспечивают вид сверху относительно установленного курса, с максимальным отклонением ±5 градусов. Ручка установки курса HSI используется для установки желаемого курса TACAN для отображения наведения по крену на ADI. Поскольку наведение по крену основано на положении маркера курса, если он установлен неправильно, наведение по крену на ADI не будет правильным для перехвата желаемого курса. Индикатор направления отображается, когда селектор режима находится в режиме TACAN или VOR/ILS, когда любой из них настроен и принимается; как только курс перехвачен, индикация показывает, приближается ли самолёт к настроенной станции или удаляется от неё.
Режим NAV COMP отображает магнитный путевой угол на стрелке курса HSI и в окне выбора курса HSI относительно текущей точки навигационного компьютера. Рулевая полоса крена ADI предоставляет информацию о наведении для направления захода на посадку на командный курс.
Когда активен режим HDG, стрелка курса и отклонение HSI привязаны к курсовой черте и магнитному курсу самолёта. В окне выбора курса HSI отображается текущий выбранный магнитный курс, который регулируется с помощью ручки установки курса. Указанная информация о курсе применяется для команды наведения по крену ADI.
Курсовая система (HSI)

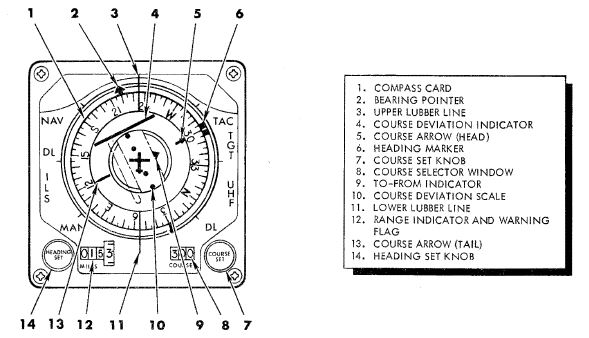
Курсовая система отображает вид сверху текущей навигации, при этом сигналы предоставляются относительно выбранного положения селектора режима навигации. Она тесно взаимодействует с несколькими навигационными средствами, такими как VOR, TACAN, ADF и навигационным компьютером самолёта (NAV COMP).
Указатель пеленга и индикатор дальности (
Карта компаса (
Указатель пеленга указывает магнитный пеленг на заданную станцию VOR, TACAN или NAV COMP, в зависимости от выбора переключателя BRG/DIST. При условии, что карта компаса предоставляет достоверную информацию, этот пеленг также является относительным. Однако, если в магнитном курсе есть неточности, для навигации к выбранному пункту назначения самолёт следует направлять не по центрированию стрелки на курсовой черте, а по курсу, указанному стрелкой, с помощью магнитного компаса. Если настроен сигнал UHF (ADF), указатель пеленга всегда показывает курс в относительном выражении.
Маркер командного курса служит ориентиром желаемого курса для директорного управления. Чтобы получить правильное наведение, маркер необходимо установить вручную во всех режимах, кроме Nav Comp (тогда он устанавливается автоматически). Сигналы наведения видны на рулевой полосе крена ADI.
Отклонение индикатора отклонения в режимах VOR и TACAN указывает на отклонение самолёта от выбранного курса (видимого на роликах курса и стрелке курса). Он показывает, насколько самолёт отклонился от выбранной траектории. 2,5 градуса на точку, максимально до 5 градусов.
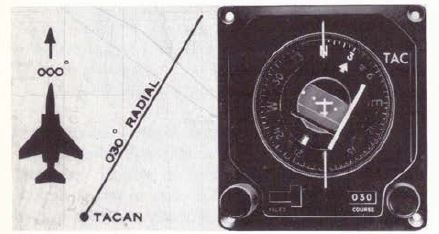
В режиме ILS HSI отображает отклонение от сигнала локализатора. Эта индикация более точная, так как стрелка более чувствительна к отклонениям в этом режиме. Примечательно, что эти показания не зависят от выбранного курса, предоставляя прямую обратную связь о выравнивании самолёта с траекторией захода на посадку по ILS.
Авиагоризонт (ADI)

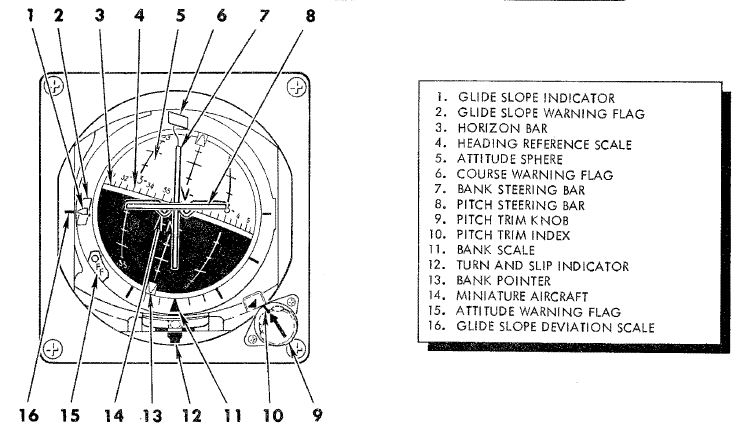
ADI обеспечивает командное наведение для перехвата выбранных курсов, станций TACAN, траекторий, радиалов VOR или пунктов назначения навигационного компьютера. Инструкция по наведению по крену представлена с помощью рулевой полосы крена, которая может показывать углы до 35 градусов при отклонении курса на 90 градусов. Любые ошибки курса меньше этого значения приведут к коррекции крена на величину менее 35 градусов. Если требуется быстрый перехват или крен более 35 градусов, сигнал наведения по крену во время поворота следует игнорировать.
Система запускает перехват по прямой линии примерно на 50 градусов к желаемой траектории, пока самолёт не окажется в пределах 15 градусов от неё. После этого она переходит на асимптотический заход, чтобы выровняться с траекторией. Для более быстрого перехвата может потребоваться игнорировать сигнал наведения по крену.
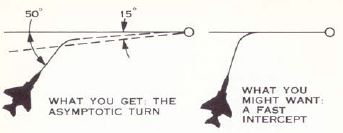
Когда с помощью ручки установки курса был введён правильный курс цели, отображение перехвата точно в пределах поля 60 градусов курса TACAN или 90 градусов для радиала VOR. Кроме того, указатель глиссады обеспечивает индикацию относительного положения глиссады во время захода на посадку по ILS.
💡 Маркер курса необходимо вручную совместить с желаемым курсом (кроме режима NAV COMP), чтобы обеспечить правильное наведение по крену. Однако из-за сноса ветром это наведение по крену не всегда может точно удерживать самолёт на траектории TACAN или VOR. В таких случаях для поддержания правильного курса требуется ручная коррекция сноса ветром для настройки маркера курса.
При запуске ADI отобразится предупреждающий флажок OFF, пока гироскоп AN/AJB-7 не выровняется. Это также может произойти из-за потери питания или сбоя сигнала. Флажок не отображается, если сбой системы происходит вне AN/AJB-7.
Индикатор пеленга, дальности и курса (BDHI)

Индикатор пеленга, дальности и курса (BDHI) отображает навигационную информацию с помощью двух стрелок, называемых указателями № 1 и № 2, которые получают входные данные, управляемые переключателем выбора режима навигации WSO.
Когда верхнее положение выбрано для TACAN/ADF/UHF, указатель № 1 указывает пеленг UHF, а указатель № 2 указывает пеленг TACAN. Если сигнал TACAN отсутствует, оба указателя указывают пеленг ADF.
Когда выбрано среднее положение - VOR/TAC, указатель № 1 указывает пеленг VOR, указатель № 2 указывает пеленг TACAN, а индикатор дальности (
В нижнем положении, NAV COMP, указатель № 1 указывает пеленг на координаты цели навигационного компьютера, а указатель № 2 указывает магнитный путевой угол. Индикатор дальности показывает расстояние до координат цели.
Инерциальная навигационная система AN/ASN-63
INS AN/ASN-63 предоставляет экипажу F-4E и интегрированной системе сброса оружия точную информацию о местоположении, скорости, ориентации и курсе в режиме реального времени. Когда система выровнена с максимальной точностью в режиме гироскопического компаса, INS имеет точность 3 морские мили в час кругового вероятного отклонения (CEP).
💡 Это означает, что после одного часа полёта вероятность ошибки точности распределена таким образом, что в 50% случаев она либо ниже, либо выше 3 морских миль.
Инерциальная измерительная платформа

Система использует четырёхкарданную (внешний крен, тангаж, внутренний крен, азимут) инерциальную навигационную платформу, причём двухкарданные подвесы крена обеспечивают резервирование, чтобы исключить блокировку кардана при выравнивании подвеса внешнего крена/азимута.
На платформе установлена пара двухкоординатных гироскопов G-200, причём ось верхнего гироскопа выровнена для вращения по оси север-юг, а нижний гироскоп выровнен для вращения по оси восток-запад; обнаружение момента в каждом гироскопе отслеживает перпендикулярные оси - таким образом, верхний гироскоп обнаруживает вращение восток/запад, а нижний гироскоп обнаруживает вращение север/юг. Таким образом, представлено вращение во всех трёх измерениях. Гироскопы плавающие, и правильная работа может начаться только после того, как жидкость достигнет рабочей температуры (160 градусов по Фаренгейту); система эффективно контролирует температуру во всём диапазоне рабочих высот Фантома. Ряд прецизионных магнитных датчиков момента обеспечивает движение локализации, в то время как датчики ускорения, работающие в отдельном электромагнитном поле, выполняют фактический сбор данных о смещениях гироскопов.
Вдоль платформы, установленные ортогонально (под углом 90 градусов друг к другу), находятся три акселерометра A-200D. Эти акселерометры, также плавающие, как и гироскопы, имеют аналогичное расположение датчиков момента и смещения для захвата скорости. Повышение точности этих оценок достигается за счёт включения камертона, резонанс которого эффективно устраняет всё статическое трение в узле захвата движения.
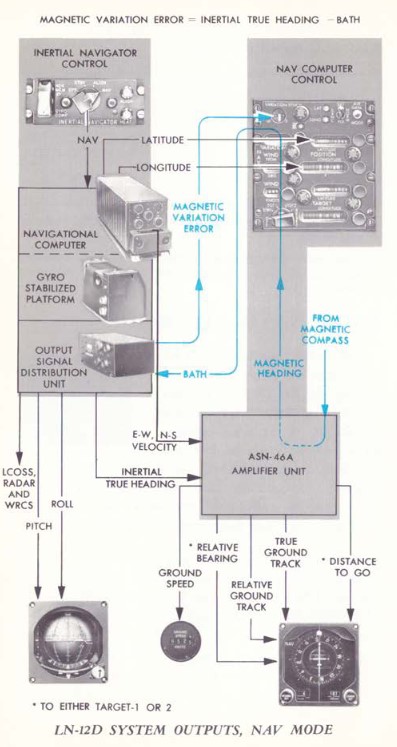
Навигационный компьютер и распределение выходных сигналов
Соответствующие сигналы движения, захваченные с гироскопов и акселерометров, усиливаются в навигационном компьютере LN-12D, который затем выполняет интеграцию с привязкой к Земле. LN-12D компенсирует все долготы и может эффективно отслеживать широту до 80 градусов, где механические ограничения расчёта тангенса относительно экватора слишком высоки для устройства.
AN/ASN-63 предоставляет информацию другим системам Фантома от OSDU, или блока распределения выходных сигналов. OSDU предоставляет путевую скорость, скорость север-юг и восток-запад, общую скорость, инерциально стабилизированную высоту, угол набора высоты, истинный инерциальный курс, путевой угол и угол сноса. WRCS получает инерциальный истинный курс, путевой угол, угол коррекции сноса и угол сноса для своего баллистического компьютера. Угол сноса захватывается для BDHI, HSI и FDC. Угол коррекции сноса также предоставляется радару и LCOSS.
Варианты выравнивания
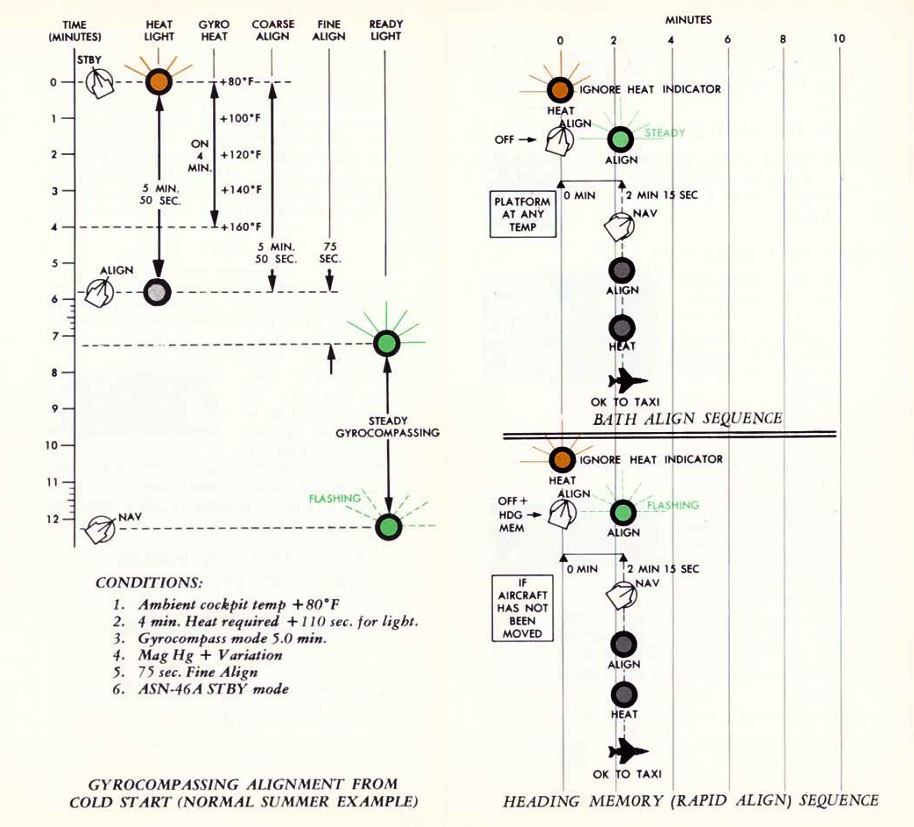
LN-12 имеет три режима выравнивания при запуске самолёта: выравнивание BATH, выравнивание по памяти курса (HDG MEM) и выравнивание по гироскопическому компасу. Перед выполнением любого выравнивания необходимо выбрать резервную систему отсчёта, панель управления навигационным компьютером следует повернуть в положение STBY, а её переключатель обновления положения следует установить в положение NORMAL. Локальное магнитное склонение следует ввести на счётчик склонения, а счётчик положения следует установить на местную широту и долготу. Это значительно ускорит выравнивание по гироскопическому компасу. Кроме того, выравнивание не следует выполнять со сложенными крыльями, так как магнитный индукционный датчик, который обеспечивает синхронизацию компаса, будет находиться на 60 градусов вне нормального положения.
INS также имеет опцию обновления положения в полёте, если экипаж заметит грубое отклонение от известных точек местоположения.
Индикация
На панели INS есть два индикатора: HEAT (
Индикатор HEAT активен в любом режиме выравнивания (включая грубое выравнивание в режиме STBY), указывая, что система нагревается. Он гаснет примерно через 110 секунд, указывая, что гироскопы достигли рабочей температуры 160 градусов по Фаренгейту.
Индикатор ALIGN, работающий исключительно в режиме ALIGN, сигнализирует о завершении выравнивания. Постоянно горящий индикатор ALIGN указывает на то, что достигнуто выравнивание BATH (быстрое). При условии, что система не столкнулась с какими-либо ошибками, а гироскопы были предварительно нагреты в режиме STBY (о чём свидетельствует погасший индикатор HEAT), система продолжит выполнять выравнивание по гироскопическому компасу. Мигающий индикатор ALIGN сигнализирует о завершении выравнивания по гироскопическому компасу или выравнивания по памяти курса.
Наилучший доступный истинный курс
Положение STBY необходимо кратковременно установить, чтобы избежать индикации NO-GO INS. После установки в положение ALIGN (индикатор HEAT можно игнорировать) индикатор ALIGN загорится постоянно примерно через 75 секунд, указывая на то, что выравнивание BATH готово. После выравнивания BATH INS имеет точность примерно 5,5 морских миль в час CEP, хотя могут наблюдаться и более высокие неточности. После достижения выравнивания BATH можно выбрать режим NAV и лететь на самолёте с учётом вышеуказанного предупреждения.
Выравнивание по памяти курса
Эта опция становится доступной, если выравнивание было ранее сохранено, а самолёт оставался неподвижным. Чтобы получить к ней доступ, выберите HDG MEM (
Чтобы получить доступ к ускоренному режиму выравнивания HDG MEM, необходимо поднять защиту и перевести переключатель вверх, а переключатель режима INS установить в положение ALIGN до тех пор, пока индикатор ALIGN не начнёт мигать. Затем INS можно перевести в режим NAV. Если позволяет время, перед переходом в ALIGN можно выбрать режим STBY, чтобы обеспечить правильный прогрев гироскопов (который проходит через цикл включения/выключения, как описано выше).
💡 Курс можно сохранить в редакторе миссий.
Выравнивание по гироскопическому компасу
Максимальная точность системы достигается, если позволить INS выполнить полное выравнивание по гироскопическому компасу. Этот метод позволяет гироскопам найти максимально точную точку отсчёта истинного севера, но может потребовать значительного количества времени - и ещё большего времени, если до включения INS было введено неточное или отсутствующее значение магнитного склонения. Например, для ошибки курса компаса в один градус время достижения максимальной точности системы составляет примерно пять минут, что обеспечивает точность выравнивания ±10 угловых минут, давая вышеупомянутые 3 морские мили отклонения в час. Минимальное время для завершения выравнивания по гироскопическому компасу после достижения уровня выравнивания BATH или HDG MEM составляет 50 дополнительных секунд, в то время как нормальное выравнивание занимает около 5 минут. Если самолёт выровнен на широте 70 градусов или более, следует ожидать дополнительного времени.
Чтобы выполнить выравнивание по гироскопическому компасу, необходимо удерживать INS в режиме STBY, пока индикатор HEAT не погаснет. Переход в ALIGN, пока индикатор горит, не позволит выполнить полное выравнивание по гироскопическому компасу, в результате чего будет выполнен только процесс BATH. Продолжительность фазы нагрева зависит от температуры окружающей среды. Система нагревается со скоростью примерно 20°F в минуту, достигая рабочей температуры 160°F. Как только система достигнет своей рабочей температуры, потребуется ещё 50 секунд, пока индикатор HEAT не погаснет. После перехода в ALIGN индикатор загорится постоянно через 75 секунд, сигнализируя о завершении начального выравнивания BATH, запуская процесс выравнивания по гироскопическому компасу. После завершения выравнивания по гироскопическому компасу индикатор ALIGN будет мигать, указывая на то, что система достигла полного выравнивания. Во время выравнивания по гироскопическому компасу (когда индикатор выравнивания горит постоянно) в режим NAV можно войти в любое время, хотя оптимальная точность будет достигнута только тогда, когда индикатор ALIGN начнёт мигать.
Любое другое доступное время до перемещения самолёта можно провести в режиме ALIGN, чтобы ещё больше повысить точность системы.
Аварийное выравнивание в полёте
В случае значительной ошибки ориентации или отказа резервной системы отсчёта ориентации можно выполнить аварийное выравнивание INS в полёте. Об этом может свидетельствовать включение индикатора NAV SYS OUT. Самолёт должен поддерживать прямой и горизонтальный полёт, при этом переключатель выбора системы отсчёта установлен в положение STBY. После установки этой конфигурации ручку режима INS следует перевести в положение OFF, а затем в положение STBY на 15 секунд. Затем, по истечении 15-секундного интервала, верните режим в NAV и возобновите прямой и горизонтальный полёт. Процесс сброса селектора отсчёта в PRIM можно выполнить примерно через 40 секунд, хотя точное время выравнивания не указано.
💡 Точность ориентации при таком выравнивании зависит от того, насколько стабильно самолёт летел во время выравнивания, и могут потребоваться последующие выравнивания. После этого аварийного выравнивания будет доступна только информация об ориентации. Скорости, положение и показания навигационного компьютера будут неточными и не могут быть использованы для навигации, а индикатор NAV SYS OUT будет гореть.
Навигационный компьютер

Навигационный компьютер ASN-46A используется для общей навигации и тактического планирования маршрута. Система имеет возможности расчёта как по ортодромии, так и по локсодромии, причём первая используется для расчёта пеленга на большие расстояния (более 120 миль), а вторая - для точности на более близких расстояниях. Навигационный компьютер работает исключительно с использованием бортовых приборов, то есть INS, компьютера данных о воздухе и магнитного компаса; он не может получать информацию от систем ILS, VOR, или TACAN.
Система может поддерживать относительный пеленг и расстояние до двух определённых путевых точек одновременно (обозначенных как Target 1 и Target 2, причём Target 2 хранится в памяти), и эта информация отображается на BDHI и ADI в режиме реального времени. Чтобы данные отображались на BDHI, переключатель выбора навигации должен быть установлен в положение NAV COMP.
Компьютер также обеспечивает подтверждение текущей точности LN-12 с помощью пары индикаторов (
Навигационный компьютер может работать в режиме Inertial или Air Data. Оба режима обеспечивают одинаковые выходные данные, но режим Inertial (по умолчанию) более точный.
В случае отказа INS навигационный компьютер переходит в режим Air Data. В режиме Air Data задний пилот должен постоянно контролировать и корректировать истинное направление и скорость ветра, магнитное склонение, так как единственными доступными компьютеру входными данными для счисления пути являются истинная воздушная скорость (от компьютера данных о воздухе) и магнитный курс от системы компаса. Когда система переходит в режим Air Data, загорится индикатор AIR DATA MODE.

Во время запуска ручки управления положением, ручки управления ветром и ручка управления магнитным склонением используются для ввода известной широты, долготы, направления и скорости ветра, а также магнитного склонения для местоположения самолёта в этот момент.
Ввод путевых точек
Ввод путевых точек и информации о цели осуществляется с помощью ручки выбора функции и двух ручек управления целью (
| Название | Описание |
|---|---|
| OFF | Система выключена. |
| STBY | Система включена, но привязка к широте и долготе не выполняется относительно значений в окнах Target. |
| TARGET 1 | Обеспечивает показания дальности и пеленга на основе текущих введённых значений в окне Target. |
| TARGET 2 | Выбирает информацию о дальности и пеленге из ранее сохранённых значений в окне Target. |
| RESET | Удаляет все ранее сохранённые значения в окне Target, сохраняет текущие введённые значения в окне Target. |
Из-за функции памяти Target 2 на практике экипаж имеет некоторую гибкость в процессе, в зависимости от требований миссии. Например, если экипажу Фантома поставлена задача патрулирования или обороны относительно известной позиции (т.е. цели), координаты этого местоположения можно загрузить в значения Target Control, установить селектор функций в положение RESET, а затем вернуться в Target 2. Любое изменение с Target 2 на Target 1 или STBY, а затем обратно на Target 2 сохранит это значение местоположения, к которому можно легко получить доступ. Это запомнит введённое положение в Target 2, откуда к нему можно будет легко получить доступ, просто переключив ручку обратно в Target 2 в любое время.
Другой распространённый метод назывался «чехардой»:
-
При запуске вторая путевая точка сохранялась в памяти Target 2 (ввод значений в Target Control, функция RESET, затем обратно в Target 2).
-
При запуске вторая путевая точка сохранялась в памяти Target 2 (ввод значений в Target Control, функция RESET, затем обратно в Target 2).
-
Во время полёта к первой путевой точке, после её прохождения, Target 2 выбирался в качестве пункта назначения, а следующая путевая точка (
3 ) вводилась в значения Target Control. -
После пролёта путевой точки 2 ручка функции устанавливалась в положение RESET, а затем обратно в Target 2 - теперь извлекая значения путевой точки 3 из значений Target Control.
Этот процесс продолжался в течение всего полёта и позволял заднему пилоту немедленно переключиться на Target 1 для быстрой проверки относительного положения относительно другого интересующего местоположения, если это необходимо, или для изменения маршрута в полёте (например, к траектории заправщика), а затем вернуться к следующей сохранённой путевой точке для навигации.
Обновление в полёте
Обновление в полёте с помощью навигационного компьютера выполняется путём прямого пролёта над известными контрольными точками, используя визуальное или радиолокационное определение местоположения, над станцией TACAN или по указанию GCI.
Обновление в режиме Inertial
Когда навигационный компьютер находится в режиме Inertial, самолёт летит по прямой и на одном уровне в известном месте фиксации.

-
Перед прибытием в точку фиксации переключатель обновления положения устанавливается в положение SET. Это отключает счётчики долготы и широты.
-
Перед прибытием в точку фиксации переключатель обновления положения устанавливается в положение SET. Это отключает счётчики долготы и широты.
-
Непосредственно перед пролётом над точкой фиксации переключатель обновления положения устанавливается и удерживается в положении FIX.
-
При прямом пролёте над точкой фиксации переключатель обновления положения отпускается, позволяя ему вернуться в положение NORMAL.
Скорость коррекции навигационного компьютера составляет примерно 3 минуты широты или долготы в секунду, и переключатель обновления (
Обновление в режиме Air Data
В режиме Air Data навигационный компьютер можно обновить, как и в режиме Inertial, с помощью метода SET/FIX или путём прямого вращения ручек положения по широте и долготе. Использование последнего метода требует установки ручки выбора функции в положение STBY, TARGET 1 или TARGET 2. Предпочтительнее использовать метод SET/FIX, так как это позволяет мгновенно обновить данные при пролёте над точкой фиксации и отпускании переключателя.
Система TACAN (тактическая воздушная навигация)

Информация о пеленге и дальности до передающих станций предоставляется системой TACAN. Система TACAN может принимать информацию от наземных станций на расстоянии до 390 миль и от самолётов, оборудованных TACAN "воздух-воздух", на расстоянии до 200 миль. Система TACAN предоставляет идентификатор передающей станции и надёжность принимаемого сигнала. Отклонение от курса рассчитывается и отображается на навигационных системах, установленных в режиме TACAN. Если сигнал TACAN недействителен, отображается предупреждение. В случае потери сигнала система продолжает отслеживать дальность в течение 15 секунд и пеленг в течение 3 секунд. Система выполнит самотестирование после потери сигнала, чтобы подтвердить работу на панели управления. Предусмотрены две антенны TACAN, и переключение сигналов происходит автоматически для поддержания наилучшего сигнала.
Органы управления TACAN

Органы управления TACAN находятся на панели управления навигацией в каждой кабине.
Командная кнопка и индикатор навигации
Кнопка и индикатор NAV CMD выполняют переключение управления между двумя кабинами и находятся в правом верхнем углу панели управления связью. Зелёный индикатор загорается слева от кнопки в кабине, которая управляет навигационной системой.
- Ручка выбора режима,
- Переключатель выбора BRG/DIST и
- Селектор навигационной функции
Как подробно описано в разделе «Группа директорного управления», селектор режима, селектор BRG/DIST и селектор навигационной функции определяют отображение информации TACAN на HSI, ADI и BDHI.
Ручки управления навигационным каналом
На панели управления TACAN под окном канала пара ручек (
Ручка выбора функции TACAN
- OFF: система TACAN обесточена.
- REC: включён только приёмник, и система принимает и декодирует сигналы пеленга от станции TACAN и предоставляет информацию о пеленге для отображения на HSI, BDHI и ADI.
- T/R: TACAN генерирует информацию о расстоянии вместе с пеленгом; расстояние затем добавляется на HSI и BDHI, указанное в морских милях.
- A/A REC: TACAN принимает и отображает информацию о пеленге для отображения наведения на HSI, BDHI и ADI от самолёта, предоставляющего сигнал радиомаяка TACAN. Выбранный канал должен быть на 63 канала выше или ниже канала маяка передающего самолёта, в том же диапазоне каналов X или Y; например, заправщик, передающий на 83X, будет приниматься на 20X.
- A/A TR: TACAN запрашивает маяк оборудованного самолёта, чтобы добавить информацию о дальности на HSI и BDHI. Метод выбора канала остаётся таким же, как и для A/A REC.
Ручка регулировки громкости навигации
Ручка NAV VOL (
Кнопка тестирования TACAN
Кнопку тестирования Tacan (
Система VOR/ILS
![]()
Всенаправленная радиомаячная система посадки по приборам (VOR/ILS) предоставляет точную информацию о пеленге и отклонении от курса от передающей наземной станции. Кроме того, самолёт может использовать возможности точного захода на посадку и снижения на аэродромах, оборудованных локализатором. Информация о наведении от системы VOR/ILS предоставляется пилоту на BDHI, ADI и HSI. Функция VOR/ILS включается на этих дисплеях с помощью соответствующего выбора органов управления группы директорного управления на переключателе пеленга/расстояния, переключателе выбора режима навигации и переключателе директорного управления.
Система ILS
Система ILS предназначена для обнаружения отклонений от назначенной траектории захода на посадку и передачи этой информации на выбранную авионику самолёта.
Когда на панели выбора навигационной функции выбран соответствующий режим ILS, несколько приборов предоставляют наведение для точного захода на посадку. К ним относятся индикатор отклонения на курсовой системе (HSI), который показывает поперечное выравнивание с взлётно-посадочной полосой, и индикатор глиссады на ADI, который отображает угол вертикального снижения относительно идеальной глиссады.
Кроме того, если директорное управление активировано, сигналы наведения будут предоставляться стрелками на авиагоризонте (ADI), предлагая визуальное наведение как по тангажу, так и по крену для поддержания правильной траектории захода на посадку.
В задней кабине оба горизонтальных и вертикальных отклонения отображаются на индикаторе курса.
Типичные максимальные отклонения составляют ±2,5 градуса для локализатора и ±0,7 градуса для глиссады.
Курсовые радиомаяки
Если курсовые радиомаяки расположены вдоль траектории захода на посадку, система самолёта будет подавать звуковой сигнал и зажигать соответствующий индикатор курсового радиомаяка при пролёте над каждым из них. В зависимости от конкретной конфигурации аэропорта могут быть:
- Дальний радиомаяк: Обозначается низким непрерывным тоном.
- Средний радиомаяк: Распознаётся более высоким переменным звуковым тоном. Этот радиомаяк указывает на более близкое расстояние до взлётно-посадочной полосы, обычно на высоте принятия решения для посадки.
- Ближний радиомаяк: Характеризуется очень высоким тоном или серией высокочастотных точек. Этот радиомаяк присутствует не всегда, но, когда он есть, сигнализирует о ещё более близком положении к концу взлётно-посадочной полосы.
Панель управления VOR/ILS

Панель управления VOR/ILS находится на левой консоли передней кабины; панель включает в себя индикатор частоты, две ручки выбора частоты (
Ручки выбора частоты VOR/ILS
Ручка выбора частоты (
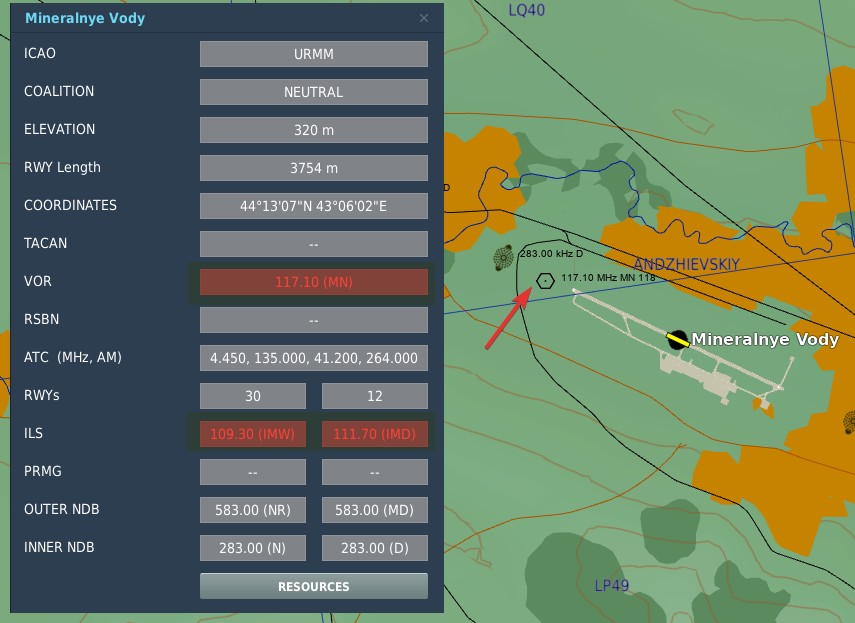
В DCS, чтобы найти желаемую частоту VOR/ILS вашей цели, перейдите на карту и щёлкните по аэродрому, на который вы хотите лететь. При наличии частоты VOR и ILS будут указаны в списке.
💡 Не каждый аэродром имеет станцию VOR или систему ILS.
Система предназначена для автоматического определения того, соответствует ли настроенная частота станции VOR или локализатору ILS. VOR работает в диапазоне частот от 108 МГц до 117,95 МГц. Диапазон частот локализатора ILS составляет от 108,1 МГц до 111,95 МГц.
В общей области частот станции VOR обычно работают на частотах с чётной десятой доли диапазона (например, 108,2 МГц, 108,4 МГц и т.д.), в то время как частоты локализатора ILS назначаются на нечётные десятые доли, включая сотые доли МГц (например, 108,1 МГц, 108,3 МГц, 108,35 МГц и т.д.).
Компонент глиссады ILS работает в диапазоне частот от 329,3 МГц до 335,0 МГц. Эти частоты связаны с соответствующими частотами локализатора, что гарантирует отсутствие необходимости в отдельной ручной настройке. При выборе частоты локализатора частота глиссады настраивается автоматически, обеспечивая интегрированное поперечное и вертикальное наведение (если доступно) для точных заходов на посадку. Курсовой радиомаяк, который работает совместно с системой ILS, работает на частоте 75 МГц.
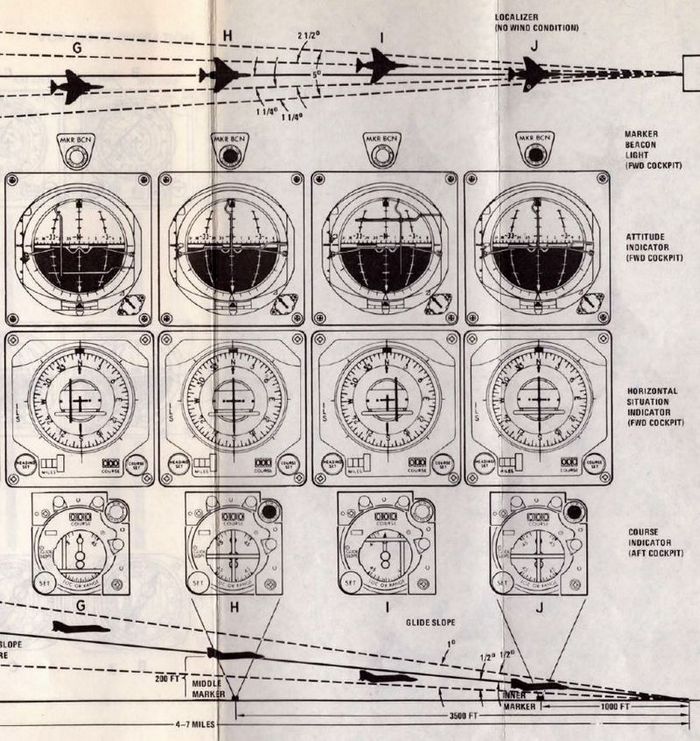
Кнопка VOR/MKR Test
После выбора частоты ILS на индикаторе частоты нажатие кнопки VOR/MKR Test (
Ручки NAV VOL и MB VOL
Ручка NAV VOL (
Индикатор курса WSO

В задней кабине на главной панели приборов находится индикатор курса; во время захода на посадку по ILS индикатор отображает относительный курс для курса, установленного в окне выбора курса, а также горизонтальное и вертикальное положение относительно локализатора ILS и глиссады, введённых пилотом. Таким образом, WSO может помочь пилоту в достижении и поддержании глиссады. Органы управления индикатором предназначены исключительно для справки WSO и не взаимодействуют с дисплеями группы директорного управления в передней кабине.
Компонентами индикатора курса являются индикатор TO-FROM (не работает с ILS), шкала отклонения от курса, шкала отклонения от глиссады, окно выбора курса, ручка установки курса, указатель курса и шкала курса, индикатор курсового радиомаяка, индикатор глиссады (GLIDE SLOPE), индикатор отклонения от курса (LOC OR RANGE) и предупреждающие флажки OFF курса и глиссады.
Как только пилот выбрал частоту ILS, WSO должен установить курс захода на посадку в окне выбора с помощью ручки SET.
Используется только с системой ILS (не работает с VOR).
Система внутренней связи
Система внутренней связи обеспечивает связь между пилотом, WSO и наземным экипажем и работает от внешнего питания или от аккумулятора самолёта, как только любой из главных переключателей двигателянаходится в положении ON.
Панель управления внутренней связью

В каждой кабине есть панель управления внутренней связью, которая содержит ручку регулировки громкости, селектор усилителя и переключатель выбора функции.
Ручка регулировки громкости
Ручка регулировки громкости внутренней связи (
Переключатель выбора функции
Селектор функций (
Ручка выбора усилителя
Трёхпозиционная ручка выбора усилителя (
Переключатель микрофона внутренней связи

Переключатель микрофона для системы внутренней связи находится в заднем положении на внутренней рукоятке РУД в обеих кабинах. При использовании внутренней связи громкость всех звуков, кроме тона набора высоты, предупреждения о сваливании и ECM, уменьшается (аналогично RADIO OVERRIDE).
Радиостанция UHF
Радиостанция UHF в F-4E обеспечивает как голосовую связь (AM), так и автоматическое радиопеленгование (ADF). Она состоит из двух основных блоков: радиопередатчика-приёмника (называемого COMM), блока питания усилителя-приёмника (называемого AUX) и защищённого приёмника (на частоте 243 МГц). Управление этими системами осуществляется с помощью двух панелей управления, расположенных в каждой кабине. Активная в данный момент панель полностью управляет работой радиостанции.
Блок COMM способен принимать и передавать на широком диапазоне вручную выбранных частот, в общей сложности 3500, или он может работать на 18 предустановленных каналах. Эта функциональность охватывает диапазон частот от 225,0 МГц до 399,95 МГц.
С другой стороны, блок AUX предназначен для приёма сигналов на 20 предустановленных каналах частот в диапазоне от 265,0 МГц до 284,9 МГц.
Оба приёмника, COMM и AUX, имеют возможность обрабатывать сигналы ADF, которые могут отображаться на курсовой системе (HSI) или индикаторе пеленга, дальности и курса (BDHI). Частоты AUX устанавливаются радиомастерской блока, настраиваемой на частоты, необходимые для района боевых действий. В игре их можно установить через 9.9 Настройки редактора миссий.
Предусмотрены две штыревые антенны, одна верхняя и одна нижняя, а также антенна ADF. После установки режима антенны для основного канала AUX принимает сигналы от другой антенны.
💡 Предустановленные каналы COMM и AUX и станции ADF можно установить в редакторе миссий..
💡 Блок AUX работает только на приём, передавать можно только с помощью блока COMM.
Панель управления связью

Установлены две панели управления связью, расположенные на правой консоли в передней кабине и на левой консоли в задней кабине. Они обеспечивают управление радиостанцией с любого кресла с выбираемым приоритетом.
Для эффективной работы автоматического радиопеленгатора (ADF) соответствующий приёмник должен быть установлен в режим ADF, выбранный с помощью селектора режима.
Командная кнопка и индикатор связи

Управление радиостанцией UHF переключается кнопкой COMM CMD (
💡 Поскольку передавать можно только с помощью блока COMM, может быть полезно настроить вторую частоту, на которой вы хотите передавать, в кабине WSO, а затем использовать кнопку COMM CMD для быстрого переключения между активными частотами.
Регулятор громкости UHF
Устанавливает громкость прослушивания (
Блок защиты речи KY-28
Блок защиты речи KY-28
Система связи UHF способна обеспечивать как обычную, так и зашифрованную голосовую передачу и приём. Как UHF, так и системы внутренней связи можно использовать в сочетании с блоком защиты речи KY-28, если это необходимо в тактической или враждебной среде. KY-28 может либо шифровать исходящие голосовые передачи, либо расшифровывать принимаемые голосовые передачи; однако эти функции не могут выполняться одновременно. Экипаж может выбрать режим работы Plain или Cipher. В режиме работы Cipher KY-28 преобразует голосовые сигналы, поступающие через микрофон, в зашифрованные передачи и расшифровывает принимаемые зашифрованные ответы в гарнитуры экипажа. В режиме работы Plain UHF работает как обычный голосовой приёмопередатчик.
Органы управления и индикаторы KY-28

KY-28 управляется с помощью панели управления KY-28 и, соответственно, обычных органов управления UHF или внутренней связью. На панелях приборов передней и задней кабин отображаются индикаторы режима для обоих режимов. Если горит индикатор режима P (
Панель управления KY-28

Панель управления KY-28 находится в задней кабине. Она имеет ручку питания, переключатель режима и кнопку обнуления кода. Ручка питания (
💡 RLY обеспечивал бы возможность использовать KY-28 в качестве ретранслятора, что не моделируется в DCS.
Переключатель режима (
💡 Чтобы разрешить обычную связь UHF, режим должен быть установлен в P (Plain), даже если ручка питания KY-28 находится в положении OFF. Если режим установлен в C (Cipher), обычная связь UHF блокируется как в передней, так и в задней кабине. Исключением является передача и приём на защищённых или вспомогательных приёмниках, так как на них режим Cipher не влияет.
Режимы работы KY-28
Все передаваемые и принимаемые сигналы проходят через блок KY-28. Когда режим KY-28 установлен в P (Plain), приёмопередатчик UHF работает в обычном голосовом режиме, независимо от того, включён KY-28 или нет.
Чтобы использовать приёмопередатчик UHF в режиме C (Cipher) KY-28, KY-28 должен быть включён. При работе в режиме Cipher блок KY-28 работает в режиме ожидания, приёма или передачи.
Все блоки KY-28 остаются в состоянии STANDBY до тех пор, пока не будет нажата кнопка микрофона или не будет принята синхронизирующая преамбула. После завершения передачи или приёма зашифрованного сообщения KY-28 автоматически возвращается в состояние ожидания. Пока KY-28 находится в состоянии ожидания, радиооборудование также работает как обычный приёмник, поскольку все входящие незашифрованные передачи передаются непосредственно в гарнитуры.
Блок переключается в состояние приёма Cipher всякий раз, когда принимается синхронизирующая преамбула. Синхронизирующая преамбула генерируется другими блоками KY-8, KY-28 или KY-38, когда оператор передающей станции нажимает переключатель микрофона. Синхронизирующая преамбула гарантирует, что все блоки в сети находятся в состоянии приёма Cipher. Зашифрованное сообщение принимается сразу после сигнала синхронизирующей преамбулы, и сообщение декодируется KY-28 и передаётся в гарнитуры экипажа в виде открытого текста.
Когда переключатель микрофона UHF установлен в положение UHF, KY-28 переключается в состояние TRANSMIT. Сигнал синхронизирующей преамбулы передаётся на все принимающие станции KY для переключения в состояние приёма Cipher. После нажатия переключателя микрофона в гарнитурах экипажа раздаётся короткий тональный сигнал. Тональный сигнал указывает на то, что сигнал синхронизирующей преамбулы завершён и передан, после чего KY-28 готов к передаче голосового сигнала экипажа. Когда кнопка микрофона отпущена, KY-28 возвращается в состояние ожидания. WSO должен выбрать связь UHF с помощью переключателя радиостанции для передачи зашифрованных сообщений. Передатчик UHF автоматически выбирается для передачи из передней кабины, если KY-28 работает в режиме C.
💡 При выбранном режиме C (Cipher) состояние передачи переопределяет состояние приёма Cipher. Следовательно, во время работы приёма Cipher переключатель микрофона UHF не следует нажимать до тех пор, пока не будет завершено входящее сообщение.
Порядок действий см. в главе «Операции KY-28».
Системы опознавания
Самолёт оснащён набором систем запроса AN/APX-76, -80A и -81A, а также ответчиком для реагирования на запросы от других самолётов.
Запросчиком может управлять WSO с помощью панели на левой вспомогательной панели. Ответчик настраивается пилотом на правой консоли.
Система ответчика

Ответчик автоматически отвечает на запросы от наземных или бортовых радиолокационных станций и выполняет дополнительные функции, такие как обеспечение кратковременной идентификации местоположения по запросу и передача специально закодированного ответа для обозначения аварийной ситуации.
Система работает путём приёма кодированных сигналов запроса и передачи кодированных сигналов ответа источнику запроса, при этом правильный ответ указывает на то, что цель дружественная.
Система имеет четыре режима. Режим 1, режим 2 и режим 3/A предназначены для идентификации безопасности, личной идентификации и идентификации трафика соответственно.
Режим 4 управляется через панель запроса WSO. Коды для режимов 1 и 3/A можно установить в кабине, а код для режима 2 необходимо установить на земле, в диапазоне от 0000 до 7777.
💡 Из-за ограничений движка настройки на панели не влияют на DCS. Однако они доступны для внешних инструментов, таких как SRS.
Самотестирование
Чтобы выполнить самотестирование режимов 2 и 3/A, установите главный переключатель (
Режимы 1 и C не имеют функций самотестирования.
Нормальная работа
Чтобы использовать систему IFF, начните с поворота главного переключателя (
Установите переключатели режима 1, режима 2, режима 3/A, режима 4 и режима C (
Запрос местоположения
Для работы переключателя запроса местоположения (I/P) установите переключатель I/P (
Если индикатор предупреждения IFF и индикатор главного предупреждения загораются на короткое время, проверьте, установлен ли переключатель выбора режима 4 (
Нормальная работа IFF будет доступна после 80-секундного прогрева, когда главный переключатель (
Аварийная работа
При катапультировании из любой кабины аварийная работа IFF активируется автоматически.
Если главный переключатель (
В аварийной ситуации поверните главный переключатель (
Системы запроса

Фантом объединяет три системы, AN/APX-76, -80A и -81A, для запроса и проверки других самолётов, чтобы определить, являются ли они дружественными или вражескими.
Система AN/APX-76 позволяет выполнять обычный запрос к дружественным системам ответчика.
Кроме того, США реконструировали некоторые советские системы ответчика, активно использовавшиеся в период с 1960 по 1980 год, в достаточной степени, чтобы иметь возможность разработать систему подмены AN/APX-81A Combat-Tree. Combat-Tree отправляет совместимые запросы к советским системам, которые они идентифицируют как дружественные системы, поэтому отправляют обратно действительный ответ. Это позволяет Фантому не только идентифицировать дружественные системы, но и некоторые вероятные вражеские самолёты.
💡 Советы быстро осознали проблему и исправили свои системы ответчика IFF, а также зашифровали связь, чтобы предотвратить ещё одно нарушение.
Работа
Органы управления объединены на панели, доступной для WSO в области левой вспомогательной панели.
Режим запроса устанавливается на первом роликовом дисплее и может быть установлен в OFF или режим 1, 2, 3, 4/A или 4/B.
💡 В DCS эффективен только режим 4 (A или B), и его можно использовать для запроса.
Остальные четыре цифры используются для установки кода IFF для запроса в режимах с 1 по 3.
После настройки запрос можно инициировать, нажав кнопку Challenge на ручке управления антенной.

На экране радара теперь будут отображаться линии над и под отражением радара, если он смог определить, что контакт дружественный. Одна линия отображается над отражением, если ответчик установлен в совместимый режим, но код отличается. Обычно это относится к гражданским самолётам.
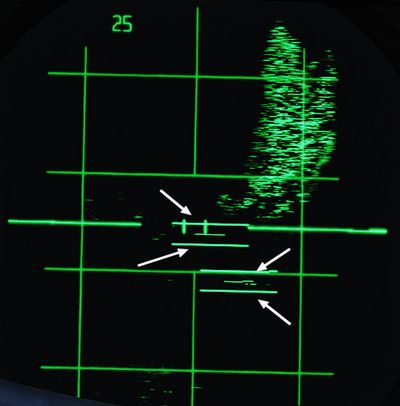
🚧 Система Combat-Tree будет доступна позже во время раннего доступа.
Индикация
Индикаторы Challenge
Панель управления имеет две лампы, которые указывают на активный запрос любой из систем запроса:
- Индикатор TEST/CHAL в левом нижнем углу - активный запрос APX-81A Combat-Tree
- Индикатор CHAL в правом верхнем углу - активный запрос APX-76
Индикаторы активности

Рядом с каждым индикатором угла атаки в кабине WSO находится индикатор, который указывает на активность, обнаруженную системой APX-81A Combat Tree.
Загорается каждый раз, когда система обнаруживает ответы IFF от вражеских самолётов.
💡 Из-за ограничений движка индикаторы активности не моделируются в игре.
Гидравлика
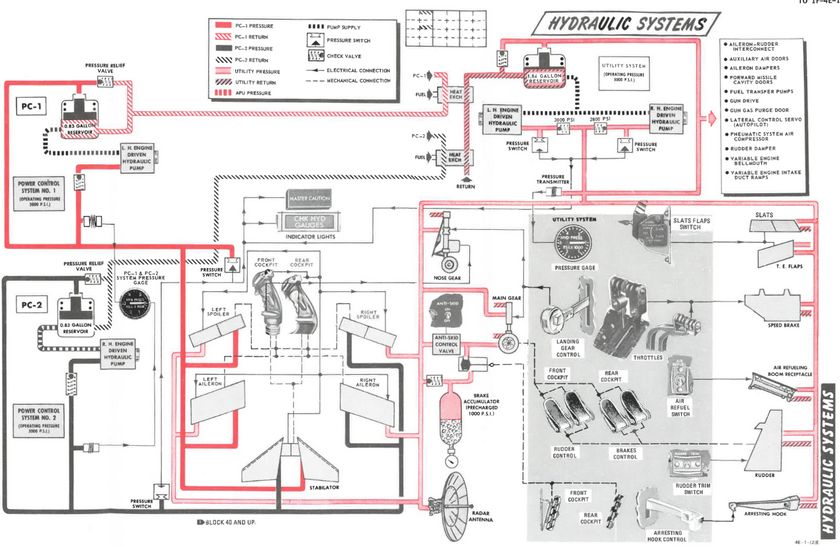
Гидравлическая система F-4E состоит из трёх полностью независимых замкнутых гидравлических систем:
- Система управления мощностью 1 (PC-1)
- Система управления мощностью 2 (PC-2)
- Вспомогательная система
Системы имеют рабочее давление примерно 3000 фунтов на квадратный дюйм и находятся под давлением всякий раз, когда работают двигатели.
Элероны, интерцепторы и стабилизатор имеют два гидравлических привода. Системы PC являются основными системами подачи гидравлической жидкости в системы управления полётом, причём PC-1 питает левую сторону самолёта, а PC-2 питает правую; они подают давление на один из двух приводов на каждой рулевой поверхности. PC-1 использует насос левого двигателя, а PC-2 использует насос правого двигателя.
Вспомогательная гидравлическая система находится под давлением от гидравлического насоса на каждом двигателе. Чтобы предотвратить резонанс вспомогательных гидравлических насосов, на выходных линиях насосов установлены обратные клапаны с разным рабочим давлением. В результате вспомогательный гидравлический насос правого двигателя будет подавать 2775 ±225 фунтов на квадратный дюйм на холостом ходу, а вспомогательный гидравлический насос левого двигателя будет подавать примерно 3000 ±250 фунтов на квадратный дюйм на холостом ходу. Вспомогательная система подаёт гидравлическое давление во все системы самолёта (которым требуется гидравлическое давление), кроме привода стабилизатора. Она приводит в действие второй привод на каждой рулевой поверхности (кроме стабилизатора), действуя как усилитель мощности и резервная система.
Первый привод стабилизатора питается от PC-1, а второй - от PC-2. Кроме того, на самолётах после TO 1F-4-903 установлен вспомогательный силовой агрегат (APU) стабилизатора для обеспечения резервного гидравлического давления для продольного управления. Гидравлический насос с электроприводом создаёт давление в системе APU 1700 ±100 фунтов на квадратный дюйм. APU подаёт давление на сторону PC-1 стабилизатора, если давление PC-1 падает ниже 1000 фунтов на квадратный дюйм.
💡 Гидравлические системы PC-1, PC-2 и вспомогательная гидравлическая система независимы друг от друга; поэтому каждый элерон и интерцептор имеет два независимых источника гидравлического давления, и одна система работает как резервная для другой.
Индикаторы гидравлического давления

На панели пьедестала в передней кабине находится пара индикаторов гидравлического давления. Один для систем PC, а другой для вспомогательной системы. Индикатор системы PC имеет две стрелки с надписями PC-1 и PC-2. Номинальное рабочее давление для всех трёх систем составляет 3000 ±250 фунтов на квадратный дюйм.
Индикаторы гидравлических систем
В случае падения давления в PC-1 или PC-2 или вспомогательной системе ниже 1500 фунтов на квадратный дюйм, или обнаруженного явного отказа насоса, на панели сигнальных ламп загорится CHK HYD GAGES вместе с предупреждением Master Caution.
💡 В случае отказа вспомогательной системы с правой стороны явное падение давления не будет отображаться, чтобы подчеркнуть включение индикатора CHK HYD GAGES, в то время как отказ с левой стороны покажет падение давления на 200 фунтов на квадратный дюйм или более на индикаторе давления вспомогательной системы. В любом случае, если давление восстановится до значения выше 1750 фунтов на квадратный дюйм, индикатор CHK HYD GAGES погаснет. В случае отказа вспомогательной системы с правой стороны явное падение давления не будет отображаться, чтобы соответствовать индикатору CHK HYD GAGES, в то время как отказ с левой стороны покажет падение давления на 200 фунтов на квадратный дюйм или более на индикаторе давления вспомогательной системы.
При предупреждении CHK HYD GAGES главное предупреждение можно сбросить; однако имейте в виду, что если индикатор CHK HYD GAGES всё ещё горит в этот момент, последующий отказ гидравлической системы не вызовет повторного включения главного предупреждения, что может привести к тому, что вы его не заметите.
Также индикаторы Master Caution и CHK HYD GAGES могут загораться на короткое время во время выпуска шасси или во время интенсивного маневрирования из-за нагрузки на систему. В таких ситуациях проверьте индикаторы давления: если они вернутся к номинальным значениям, игнорируйте предупреждения, так как они скоро сбросятся.
 Технический сержант (TSGT) Росселл Пауэлл из 347-й эскадрильи электронного обслуживания обнаруживает утечку в гидравлическом соединении на самолёте F-4 Phantom II во время учений по ремонту боевых повреждений самолёта
Технический сержант (TSGT) Росселл Пауэлл из 347-й эскадрильи электронного обслуживания обнаруживает утечку в гидравлическом соединении на самолёте F-4 Phantom II во время учений по ремонту боевых повреждений самолёта
Пневматика
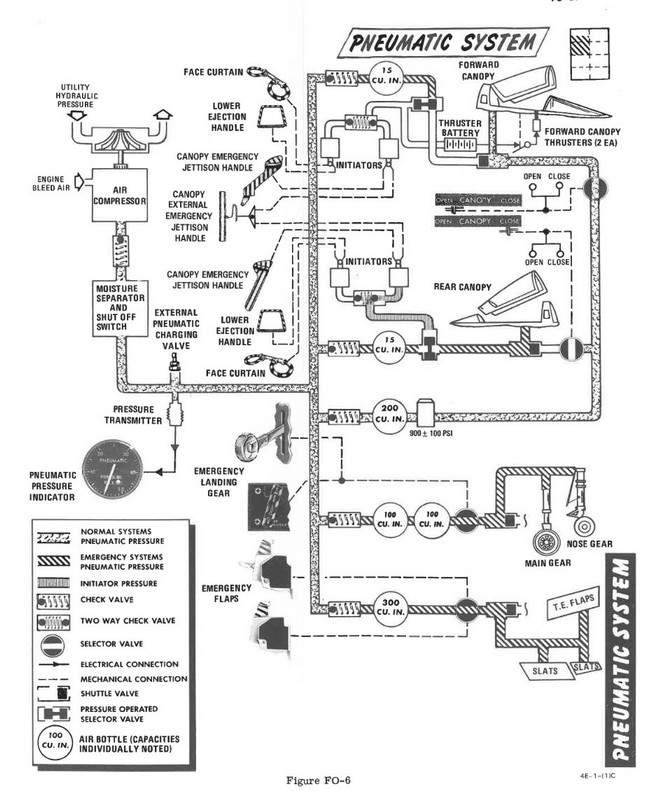
Пневматическая система обеспечивает сжатый воздух для нормальной и аварийной работы фонарей, а также аварийной работы шасси и предкрылков/закрылков. Воздух для пневматической системы отбирается от двигателя, через систему охлаждения электронного оборудования, и сжимается воздушным компрессором с приводом от гидравлического двигателя. Датчик пневматического давления в водоотделителе системы открывает гидравлический запорный клапан, чтобы активировать воздушный компрессор, когда давление в системе падает ниже 2750 +50 -0 фунтов на квадратный дюйм. Когда давление в пневматической системе достигает 3100 +100 -50 фунтов на квадратный дюйм, датчик пневматического давления закрывает гидравлический запорный клапан, который отключает воздушный компрессор. Нормальный диапазон давления в системе составляет от 2650 до 3300 фунтов на квадратный дюйм из-за допусков датчика давления и манометра.
Затем сжатый воздух от воздушного компрессора подаётся в различные баки, которые могут подавать его в несколько систем:
- Фонари
- Шасси (в аварийном режиме)
- Предкрылки и закрылки (в аварийном режиме)
На панели пьедестала передней кабины находится индикатор пневматического давления Он показывает давление в коллекторе системы.

Система отбора воздуха
Система отбора воздуха подаёт горячий воздух под высоким давлением от двигателей к системе управления пограничным слоем (на самолётах без предкрылков), системе кондиционирования воздуха кабины и системе наддува топливных баков. Управление расходом, температурой и давлением отбираемого воздуха запускается и регулируется в соответствии с требованиями каждой системы. Система использует отбираемый воздух компрессора двигателя, отбираемый от 17-й ступени компрессора. Обычно оба двигателя подают воздух для работы этих систем, но при необходимости работа одного двигателя обеспечит достаточное количество воздуха для их работы.
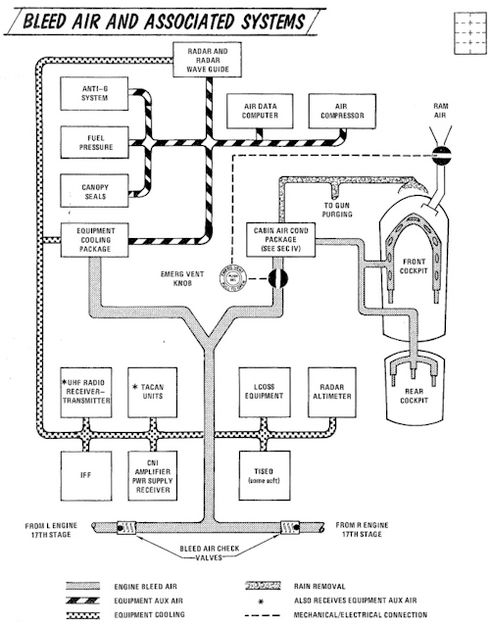
Вспомогательные системы
Кислородная система

Дыхательный кислород для экипажа обеспечивается 10-литровым баллоном с жидким кислородом. Панель регулятора находится на левой стороне в каждой кабине - на консоли в передней кабине и на левой вспомогательной панели в задней. Подача кислорода запускается в каждой кабине с помощью рычага подачи (
Подробная таблица продолжительности работы кислорода приведена здесь:
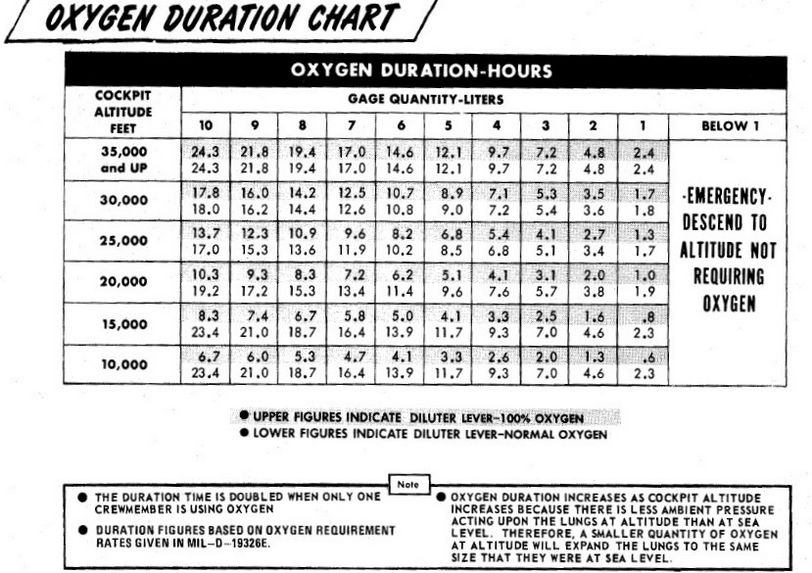
Фонари

Фонари приводятся в действие пневматической системой. Ими управляют независимо друг от друга из обеих кабин; ручка для стандартного открытия и закрытия находится на левой стороне каждой кабины, рядом с ней находится жёлто-чёрная ручка аварийного сброса. На правой стороне кабины, в том же относительном положении, находится рычаг ручного разблокирования, который можно использовать для разблокировки фонаря в случае отказа пневматической системы.
В каждой кабине используется надувной уплотнитель фонаря для герметизации фонарей для наддува кабины. Уплотнители фонаря автоматически надуваются и сдуваются при открытии и закрытии фонарей с помощью системы отбора воздуха.

Удаление дождя с лобового стекла

Чтобы удалить осадки, установите переключатель удаления дождя в положение ON, чтобы направить отбираемый воздух от системы кондиционирования воздуха к внешнему вентиляционному отверстию под лобовым стеклом, разбивая дождевую воду на более мелкие капли и сдувая их с лобового стекла. Система повышает температуру лобового стекла и может привести к включению индикатора WINDSHIELD TEMP HI вместе с главным предупреждением. В этой ситуации температура приближается к температуре оптических искажений, и её необходимо немедленно установить в положение OFF.
Из-за нагрева лобового стекла трением на высоких скоростях индикатор WINDSHIELD TEMP HI также может загореться при выключенной системе; в этом случае предупреждение можно игнорировать.
Электрика
F-4E получает электроэнергию от пары генераторов переменного тока, приводимых в движение двигателями J79, пары преобразователей переменного тока в постоянный и аккумулятора для работы электрических функций при выключенных двигателях. Кроме того, Phantom II может получать внешнее электропитание от наземного экипажа. Схема с двумя генераторами, обычно работающими независимо, включает в себя соединительную шину, которая может соединять обе шины вместе, чтобы получать питание от одного генератора в случае отказа.
Индикаторы генератора

На панели индикаторов генератора расположены три предупреждающих индикатора: LH GEN OUT, RH GEN OUT и BUS TIE OPEN. Соответствующее предупреждение GEN OUT загорится в случае отказа соответствующего генератора. Индикация BUS TIE OPEN подтверждает, что один работающий генератор обеспечивает питание всего самолёта. В случае отказа генератора также загорится главное предупреждение. Однако в случае отказа обоих генераторов индикатор GEN OUT не загорится.
Переключатели управления генератором

Пара переключателей управления генератором находится на правой консоли, по одному на каждый двигатель. Эти трёхпозиционные переключатели - ON (вперёд), OFF, ON External (назад) - управляют состоянием каждого соответствующего генератора. В случае возможного отказа генератора выбор OFF для генератора, который, как считается, отключён, приведёт к тому, что силовая шина будет подавать электричество от оставшегося генератора на другую половину электрической системы. Настройка External On используется для наземного обслуживания при подключении к внешнему питанию и обеспечивает электропитание всех приборов, кроме CNI и AFCS.
Переключатель наземного питания приборов

Питание от внешнего источника на шины приборов (переменный ток 115/200 В, переменный ток 28 В и переменный ток 14 В) может подаваться переключателем наземного питания приборов (
Система шин
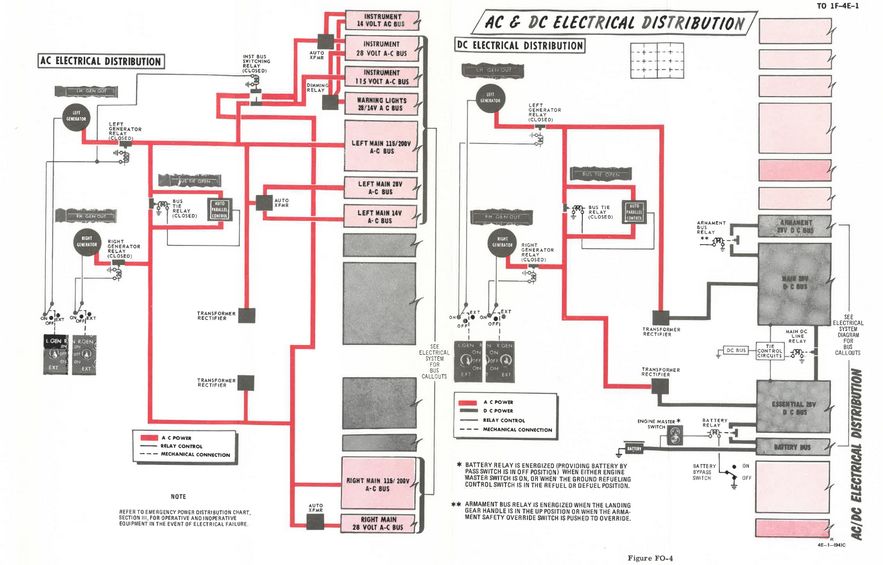
Аккумулятор и генераторы питают несколько шин, которые затем направляют ток к соответствующим системам:
- Левая основная шина переменного тока
- Правая основная шина переменного тока
- Шина приборов переменного тока
- Шина сигнальных ламп переменного тока
- Основная шина постоянного тока
- Аварийная шина постоянного тока
- Шина вооружения постоянного тока
- Шина аккумулятора
Автоматические выключатели
От шин питание сначала проходит через автоматические выключатели, прежде чем попасть в сами системы.
💡 Из-за ограничений движка автоматические выключатели в кабине WSO в настоящее время недоступны.
Большинство автоматических выключателей расположены в кабине WSO на любой из стенок, за исключением одной панели в кабине пилота, содержащей выключатели для рулевых поверхностей и аналогичных важных систем.
Панель пилота

Эта панель, расположенная на правой стенке кабины пилота, содержит семь автоматических выключателей, отвечающих за рулевые поверхности и другие системы, важные для безопасной эксплуатации самолёта.
- Триммер ощущения элеронов (
1 ) - Триммер ощущения стабилизатора (
2 ) - Воздушный тормоз (
3 ) - Шасси (
4 ) - Закрылки (
5 ) - Органы управления триммированием (
6 ) - Триммер руля направления (
7 )
Панель освещения

Справа от панели сигнальных ламп в кабине пилота, за пучком кабелей, находятся два автоматических выключателя освещения.
Верхний (
Панель автоматических выключателей № 1

Передняя часть правой стенки в кабине WSO.
Содержит автоматические выключатели для всех станций, вооружения и системы оружия.
Панель автоматических выключателей № 2
Центральная часть правой стенки в кабине WSO.
В основном отвечает за работу двигателя и гидравлики.
Панель автоматических выключателей № 3

Задняя часть правой стенки в кабине WSO.
Содержит выключатели для вспомогательных функций, таких как противообледенение или тормозной крюк.
Панель автоматических выключателей № 4

Задняя часть левой стенки в кабине WSO.
Главные органы управления питанием, поступающим по всем шинам, бортовой компьютер и прицельный контейнер.
Панель автоматических выключателей № 7

Рядом с правой педалью руля направления в кабине WSO.
Эта панель, скрытая под крышкой, содержит все выключатели для оборудования ECM и постановки помех.
Отказы и распределение аварийного питания
В случае повреждения самолёта и потери левого и/или правого генератора, а также основной шины постоянного тока 28 В есть несколько различных систем, которые не работают для соответствующей шины.
Отказ левого генератора - соединительная шина разомкнута
Если левый генератор перестаёт работать, следующие системы не будут работать:
| Важные системы | Неважные системы |
|---|---|
| Система противообледенения | AN/ARW 77 (используется для запуска AGM-12 Bullpup) |
| Противоскользящая система | Противобликовый огонь (одна нить) |
| Зажигание форсажа | DSCG |
| Нагреватель INS | Контейнеры ECM |
| Посадочный огонь | EОхлаждение оборудования (например, Pave Spike) |
| Фюзеляжные огни | |
| Освещение консоли передней кабины | |
| Красные прожекторы приборов передней кабины (DIM) | |
| Оптический прицел | |
| Преобразователь 28 В левого генератора | |
| Топливный насос наддува левого двигателя | |
| Запуск ракеты левого двигателя | |
| Питание ракеты левого двигателя | |
| Выпрямитель преобразователя левого генератора | |
| Электрический топливный насос перекачки № 4 | |
| Носовая пушка | |
| Радар | |
| Фотоаппарат радиолокационного индикатора | |
| Красные прожекторы консоли | |
| Right-hand missile power | |
| Регулировка кресла | |
| Наведение AGM-45 Shrike | |
| Целеуказатель (Pave Spike) | |
| Вспомогательный огонь | |
| Вспомогательное питание переменного тока | |
| Тусклое освещение крыльев и хвоста | |
| Питание WRCS |
Отказ правого генератора - соединительная шина разомкнута
Если правый генератор перестаёт работать, следующие системы не будут работать:
| Важные системы | Неважные системы |
|---|---|
| Обогреватель трубки ПВД воздушной скорости | ADF |
| Обогреватель датчика угла атаки | механизм триммерного эффекта элеронов |
| Обогреватель трубки ПВД входного устройства | Взаимосвязь элеронов и руля направления |
| Обогрев и вентиляция кабины | Система радиолокационного предупреждения ALR-46 |
| Индикатор количества топлива | Кодировщик высоты |
| IFF | Противобликовый огонь (одна нить) |
| Указатель курса задней кабины | Приёмник радара APR-36/37 |
| TACAN | Система опознавания «свой-чужой» APX 80 "воздух-воздух" |
| Указатели пеленга VOR | Питание вооружения |
| Автопилот | |
| Вспомогательный приёмник | |
| CADC | |
| Контейнеры ECM | |
| Посадочные огни | |
| Освещение приборов передней кабины | |
| Фотоаппарат прицела | |
| Прожекторы дозаправки топливом в воздухе | |
| Управление клином левого двигателя | |
| Электрический топливный насос перекачки № 6 | |
| Индикатор кислорода | |
| Радиовысотомер | |
| Управление клином правого двигателя | |
| Преобразователь 28 В правого генератора | |
| Топливный насос наддува правого двигателя | |
| Выпрямитель преобразователя правого генератора | |
| Стабилизация | |
| Рулёжный огонь | |
| Датчик температуры лобового стекла | |
| Яркое освещение крыльев и хвоста |
Отказ основной шины постоянного тока 28 В
Если основная шина постоянного тока 28 В перестаёт работать, следующие системы не будут работать:
| Важные системы | Неважные системы |
|---|---|
| Противоскользящая система | Индикаторы IN-RANGE и SHOOT ACM |
| Реле соединительной шины (индикатор BUS TIE OPEN включён) | ADF |
| Обогрев и вентиляция кабины | Взаимосвязь элеронов и руля направления |
| Сброс топлива из внутренних баков крыла | Бортовой видеомагнитофон (AVTR) |
| Посадочные и рулёжные огни | Контейнер средств противодействия ALE-40 |
| Управление носовой стойкой шасси | Вибратор высотомера |
| TACAN | Приёмник радара APR-36/37 |
| Указатель поворота и скольжения (задняя кабина) | Система опознавания «свой-чужой» APX 80 "воздух-воздух" |
| Тормозной крюк (только операция подъёма) | |
| Вспомогательные воздушные заслонки | |
| Вспомогательный приёмник | |
| Сброс обычного оружия | |
| Бортовые фотоаппараты | |
| DSCG | |
| Управление ECM | |
| Контейнеры ECM | |
| Регулируемое входное устройство двигателя | |
| Управление охлаждением оборудования | |
| Фюзеляжные, противобликовые и хвостовые огни | |
| Фотоаппарат прицела | |
| Оптический прицел | |
| Топливный насос наддува левого двигателя | |
| Запуск ракеты | |
| Электрический топливный насос перекачки № 4 | |
| Электрический топливный насос перекачки № 4 | |
| Носовая пушка | |
| Пневматический компрессор | |
| Радар | |
| Радиовысотомер | |
| Удаление дождя | |
| Фотоаппарат радиолокационного индикатора | |
| Топливный насос наддува правого двигателя | |
| Управление триммером руля направления/входным устройством | |
| Воздушный тормоз | |
| Включение блокировки центрального боеприпаса специального оружия | |
| Кнопки выбора станции и индикаторы выбора станции | |
| Индикатор положения стабилизатора | |
| Целеуказатель (Pave Spike) | |
| Вспомогательное питание | |
| Питание регистратора VGH | |
| Питание Walleye | |
| Сигнальные лампы (DIM) | |
| Питание WRCS |
Только питание от аккумулятора
Если доступно только питание от аккумулятора, следующие системы будут работать:
| Важные системы | Неважные системы |
|---|---|
| Индикатор угла атаки | Аварийный сброс всех боеприпасов |
| Индикаторы EGT | Звуковой генератор угла атаки |
| Индикатор катапультирования | Управление топливом |
| Аварийный авиагоризонт | Питание топливного клапана |
| Обнаружение пожара и перегрева двигателя (функции тестирования) | Прожекторы приборов передней кабины (BRT) |
| Внешняя перекачка топлива из баков крыла (управление) | Защищённый приёмник |
| Управление закрылками/предкрылками | KY-28 |
| Индикатор положения закрылков/предкрылков | Обтекатель ракеты |
| Индикатор количества топлива | Сброс ракеты |
| Дозаправка топливом в воздухе | Индикатор положения сопла |
| ILS: CDI, индикаторы глиссады, звук, курсовой радиомаяк | Сброс внешней станции |
| Внутренняя связь | Блокировка центрального боеприпаса специального оружия |
| Внутренняя перекачка топлива из баков крыла (управление) | Разблокировка специального оружия |
| Управление шасси | Управление триммированием |
| Индикатор положения шасси | |
| Левое и правое основное зажигание | |
| Триммер ощущения стабилизатора | |
| VOR: CDI, TO-From и звук | |
| Белый прожектор |
Осветительное оборудование
Внешнее освещение

Внешнее освещение F-4E включает в себя габаритные огни, расположенные на крыльях и хвосте, посадочные огни на крыльях, фюзеляжные огни, противобликовый огонь и огонь приёмника дозаправки топливом в воздухе; органы управления ими находятся на правой консоли. Дополнительное освещение в полёте обеспечивается посадочными огнями, которые имеют отдельный набор органов управления над правой консолью. Дополнительное освещение доступно для посадки и руления при выпущенном шасси, а органы управления ими находятся на левой вспомогательной панели.
 Панель внешнего освещения пилота
Панель внешнего освещения пилота
Габаритные и посадочные огни

Освещение крыльев и посадочные огни управляются одним переключателем с вариантами OFF, DIM и BRT. Эти огни не имеют функции мигания. Хвостовой огонь управляется переключателем мигания в положении STEADY или FLASH.
Противобликовые и фюзеляжные огни
| Фюзеляжные огни сверху | Фюзеляжные огни снизу |
|---|---|
 |  |
Три белых противобликовых огня находятся за фонарём задней кабины, и по одному под каждым воздухозаборником двигателя.

Красный противобликовый огонь находится на вертикальном стабилизаторе.
Всеми ими управляет трёхпозиционный переключатель FUS (
Посадочные и рулёжные огни

Посадочные и рулёжные огни расположены на створке носовой стойки шасси и загораются только при выпущенном шасси.
Огни приёмника дозаправки топливом в воздухе
Чтобы помочь операторам с выравниванием штанги, огни, освещающие приёмник дозаправки топливом в воздухе, включаются, когда он поднят путём установки переключателя дозаправки топливом в воздухе в положение EXTEND.
Посадочные огни

Электролюминесцентные посадочные огни расположены вдоль фюзеляжа, на законцовках крыльев и на вертикальном стабилизаторе. Они активируются с помощью панели управления, расположенной над правой консолью, и имеют варианты ON, OFF и MOM (для кратковременного включения).
Внутреннее освещение
Внутреннее освещение состоит из нескольких прожекторов, подсветки панели, подсветки приборов и нескольких сигнальных ламп и индикаторов с регулируемой яркостью.
Обе кабины полностью пригодны для ночных полётов и имеют отдельные органы управления для регулировки яркости.
Большинство органов управления внутренним освещением находятся в задней части правых консолей.
| Пилот | WSO |
|---|---|
 |  |
Прожекторы
Для общего освещения кабины самолёт оснащён несколькими красными прожекторами, а также белым прожектором с питанием от аккумулятора.
Белый прожектор
Переключатель белого прожектора (1 для пилота, 4 для WSO) действует независимо от всех остальных органов управления на панели и имеет два положения: ON и OFF. Он активирует отдельный аварийный прожектор (также называемый грозовым светом), который освещает кабину белым светом. Лампа питается от шины аккумулятора, чтобы гарантировать её постоянную работу, даже в случае полной потери питания.
🟡 ВНИМАНИЕ: Не забудьте выключить свет перед тем, как оставить самолёт на длительную стоянку, иначе он разрядит аккумулятор.
Красные прожекторы
Красные прожекторы можно переключать по отдельности для консолей и панели приборов. Органы управления находятся на правой консоли и правой стенке.

💡 WSO не имеет органов управления прожектором приборов. Освещение также управляется переключателем пилота на правой стенке.
Все три положения переключателей питаются от разных шин, чтобы обеспечить максимальную доступность:
| Лампа | Шина |
|---|---|
| Яркая | Аварийная шина постоянного тока 28 В |
| Средняя | Левая основная шина переменного тока 14 В |
| Тусклая | Левая основная шина переменного тока 115 В |
💡 Прожекторы выключаются путём выбора положения DIM и установки ручки яркости консоли в положение OFF.
Подсветка панели
Чтобы все панели и приборы были читаемы ночью, подсветку и подсветку приборов может включить любой член экипажа по отдельности для консолей и панели приборов.

Органы управления расположены на правой консоли.

Освещение консоли обеспечивается левой основной шиной переменного тока 115 В, а освещение панели приборов - правой основной шиной переменного тока 115 В.
Освещение пилотажных приборов
Помимо общего освещения панели, яркость следующих шести пилотажных приборов можно регулировать индивидуально пилотом с помощью ручки яркости пилотажных приборов на передней панели и шести ручек на правой стенке.
- Индикатор угла атаки
- Индикатор воздушной скорости
- HSI
- ADI
- VVI
- Высотомер
| Яркость пилотажных приборов | Интенсивность освещения пилотажных приборов |
|---|---|
 |  |
Ручка яркости пилотажных приборов действует как главный регулятор. В крайнем положении против часовой стрелки освещение всех шести приборов выключено.
Ручки на стенке можно использовать для индивидуальной регулировки яркости приборов, при этом крайнее положение против часовой стрелки выключает их, а перемещение ручки по часовой стрелке постепенно увеличивает яркость, пока она не достигнет уровня, заданного ручкой яркости пилотажных приборов.
💡 WSO не имеет органов управления освещением приборов. Вместо этого яркость также регулируется ручками пилота.
🚧 В настоящее время освещение пилотажных приборов связано с ручкой панели приборов на правой консоли. Правильные элементы управления будут доступны позже во время раннего доступа.
Яркость сигнальных ламп и индикаторов
Помимо регулировки яркости пилотажных приборов, ручка яркости пилотажных приборов также регулирует интенсивность всех сигнальных ламп и индикаторов в обеих кабинах.
В крайнем положении против часовой стрелки все индикаторы имеют полную яркость. Перемещение ручки из этого положения приведёт к уменьшению яркости ламп. Настройка переменной яркости недоступна.
Некоторые лампы, такие как индикаторы пожара и перегрева, исключены из цепи и всегда будут гореть с полной яркостью.
💡 Сигнальные лампы и индикаторы нельзя полностью выключить, доступна только яркая или тусклая настройка.
💡 Индикаторы SHOOT не имеют настройки тусклого освещения и полностью выключаются, когда ручка перемещается из крайнего положения против часовой стрелки.
Лампы с регулировкой яркости поворотом
В обеих кабинах есть несколько ламп, яркость которых можно регулировать индивидуально, вращая лампу. Вращение перемещает затвор перед лампой, что приводит к уменьшению интенсивности.
Некоторые из этих ламп также можно нажимать для тестирования.
В кабине пилота к этим лампам относятся:
| Название | Местоположение |
|---|---|
| Индикатор CMS | Левая консоль |
| Индикатор тепловых ловушек | Левая консоль |
| Регистратор | Левая вспомогательная панель |
| Курсовой радиомаяк | Группа директорного управления |
| Набор высоты | Индикаторы над головой |
| Режим P KY-28 | Правая вспомогательная панель |
| Режим C KY-28 | Правая вспомогательная панель |
| Команда радио | Правая консоль |
| Команда TACAN | Правая консоль |
| Ответ IFF | Правая консоль |
| Тест IFF | Правая консоль |
В кабине WSO есть следующие лампы с регулировкой яркости поворотом:
| Название | Местоположение |
|---|---|
| Команда радио | Левая консоль |
| Команда TACAN | Левая консоль |
| Индикатор дипольных отражателей | Левая консоль |
| Индикатор тепловых ловушек | Левая консоль |
| Запрос APX | Индикаторы спереди |
| Запрос Combat-Tree | Индикаторы спереди |
| Курсовой радиомаяк | Индикаторы спереди |
| Режим P KY-28 | Индикаторы спереди |
| Режим C KY-28 | Индикаторы спереди |
| Выравнивание INS | Правая консоль |
| Нагрев INS | Правая консоль |
Прочее
Некоторые панели и системы имеют отдельные органы управления освещением, не связанные с общими ручками яркости консоли или приборов.
В кабине пилота к этим дополнительным органам управления яркостью относятся:
| Название | Местоположение |
|---|---|
| SAI | Левая стенка |
| Индикаторы станции | Управление оружием |
| Дисплей индикатора дальности | Управление оружием |
| Сетка HUD | Органы управления DSCG |
| Экран DSCG | Органы управления DSCG |
| Шкала DSCG | Органы управления DSCG |
| Дисплей RWR | Правая основная панель |
| Кнопки RWR | Правая основная панель |
| Подсветка резервного компаса | Правая консоль |
| Индикаторы угла атаки | Правая стенка |
В то время как WSO имеет следующие органы управления яркостью:
| Название | Местоположение |
|---|---|
| Дисплей RWR | Индикаторы спереди |
| Кнопки RWR | Индикаторы спереди |
| Подсветка резервного компаса | Правая консоль |
| Индикаторы угла атаки | Правая консоль |
| Экран DSCG | Группа на пьедестале |
| Шкала DSCG | Группа на пьедестале |
| Сетка Pave Spike | Группа на пьедестале |
| Панель Pave Spike | Группа на пьедестале |
Система радара
"Я вам скажу, что внутри у него отличный радар, APQ-120, вы можете получить изображение комара на расстоянии 200 миль или стелс-истребителя."
 Техник работает над радаром управления огнём AN/APQ-120(V) в носу самолёта F-4E Phantom II 3-го тактического истребительного крыла
Техник работает над радаром управления огнём AN/APQ-120(V) в носу самолёта F-4E Phantom II 3-го тактического истребительного крыла
Радар управления огнём Westinghouse AN/APQ-120, продолжение -100 на F-4C и 109 на 4D, представляет собой твердотельный импульсный радар, обеспечивающий F-4E функции перехвата "воздух-воздух", картографирования "воздух-земля", предоставления информации о наземных целях системам бомбометания LABS и WRCS, а также функции радиомаяка. APQ-120 также работает как система отображения для TISEO и видеоизображения с оружия с телевизионным наведением, и интегрирован с системой запроса APX-80.
Основное преобразование с APQ-109 на APQ-120 включало уменьшение количества сменных в полевых условиях блоков в носовой части, а также уменьшение их размера; в то время как -109 был гибридным в своем движении к твердотельной аппаратуре (в основном в секциях обработки низкого напряжения), 120 был полностью твердотельной системой. Хотя это обновление уменьшило занимаемое системой пространство и её вес, модификация носовой части F-4 для установки пушки M61 потребовала уменьшения размера антенны, что привело к незначительному уменьшению общей дальности обнаружения. Однако, если учесть повышение надёжности системы и сокращение обслуживания, компромисс был признан приемлемым.
Начиная с производства F-4E блока 60, и дооснащения некоторых самолётов более ранних блоков, было добавлено цифровое устройство преобразования развёртки (Digital Scan Converter Group). Включение DSCG повысило общую простоту обращения с APQ-120 за счёт добавления дополнительной информации непосредственно на дисплей, включая текущую настройку дальности радара и рассчитанное значение скорости сближения с текущей захваченной целью. Кроме того, чёткость изображения во всех условиях освещения была улучшена за счёт отображения опорных сеток радара непосредственно как части отображаемого изображения, а не ранее использовавшихся отметок на стекле DVST. Кроме того, DSCG предоставил возможность двум членам экипажа использовать дисплеи независимо друг от друга; ранее WSO управлял тем, какой режим будет отображаться как на DVST, так и на дисплее повторителя переднего сиденья. С DSCG пилот мог использовать TISEO или телевизионное оружие "воздух-земля", в то время как WSO поддерживал схему сканирования или находил наземную точку отсчёта и вводил её в WRCS.

Принцип работы
APQ-120 - это импульсный радар. Радар излучает радиоимпульс, сфокусированный в одном направлении, через антенну.
Любое препятствие в этом направлении, например, другой самолёт или просто земля, отразит часть энергии обратно, которую радар затем принимает через антенну для обработки и оценки экипажем. На основе времени, которое потребовалось сигналу, чтобы вернуться обратно, радар вычисляет расстояние до препятствия.
Все отражения радара затем отображаются на экране на основе их расстояния, что приводит к прямому и нефильтрованному представлению мира перед самолётом.
Однако, поскольку излучатель не является идеальным устройством, энергия излучается во всех направлениях, при этом основное внимание уделяется направлению, в котором направлена антенна. Это называется главным лепестком антенны, а любые другие нежелательные отражения от разных направлений называются боковыми лепестками.
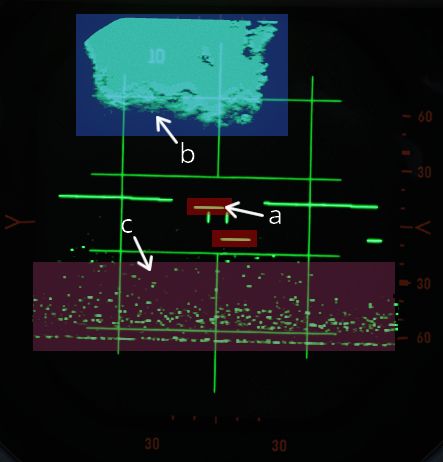
| Метка | Описание |
|---|---|
| a | Цели из главного лепестка |
| b | Помехи от земли из главного лепестка |
| c | Помехи от земли из боковых лепестков |
Та же ситуация снаружи выглядит следующим образом.
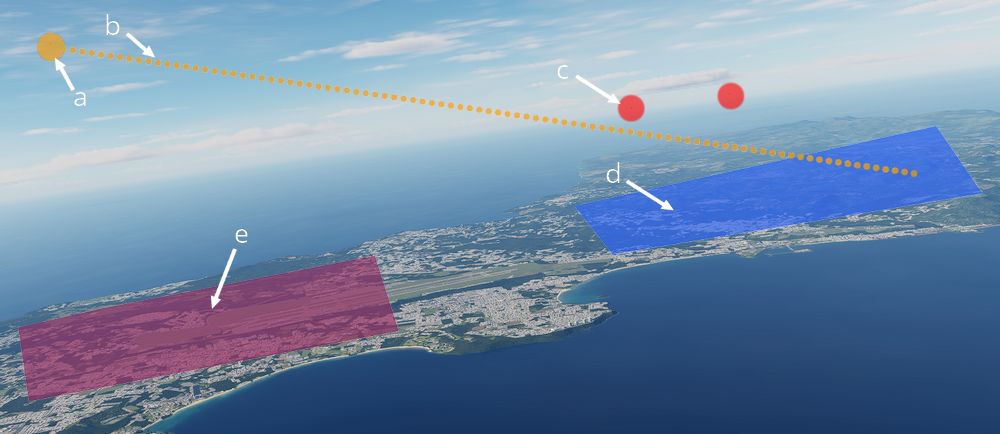
| Метка | Описание |
|---|---|
| a | Собственный самолёт |
| b | Направление антенны |
| c | Цели из главного лепестка |
| d | Помехи от земли из главного лепестка |
| e | Помехи от земли из боковых лепестков |
Интерфейс радара
WSO может настроить систему радара с помощью двух панелей на левой консоли, панели управления радаром и панели управления-мониторинга.
Отражения радара отображаются на экране DSCG, а ручка управления антенной на правой консоли кабины WSO может использоваться для управления радаром.
Панель управления радаром

Подробное описание панели см. в разделе «Центральная секция левой консоли WSO»
Питание

| Название | Описание |
|---|---|
| OFF | Отключает питание радара. |
| TEST | Подаёт напряжение на питание контрольного монитора и обеспечивает функции тестирования BIT с 1 по 6. |
| STBY | Питание подаётся на радар, он остаётся в непередающем режиме ожидания. |
| OPR | Система полностью работоспособна. |
| EMER | Отключает ограничения по времени задержки, давлению и температуре, чтобы разрешить работу радара. |
Первоначальное включение APQ-120 начинается с установки ручки питания радара в положение TEST или STBY (ожидание). Цикл прогрева занимает 3 минуты с момента выбора любой настройки, и подтверждение этого процесса отображается на контрольном измерителе на панели мониторинга; через 30 секунд после включения питания прибор покажет значение примерно 250 В постоянного тока; с момента, когда стрелка покажет питание на этом номинальном значении, процедура прогрева займёт 2,5 минуты.
Через 3 минуты радар можно безопасно перевести в положение OPR (работа) для использования радара, тестирование BIT можно выполнить в режиме TEST, или радар можно оставить в положении STBY для безопасности экипажа и других людей на земле.
В случае аварийной ситуации, требующей немедленной работы радара, можно выбрать EMER; последствия этого см. в разделе «Магнетрон и клистрон».
Дальность

Ручка управления дальностью устанавливает дальность действия радара. Обратите внимание, что есть некоторые режимы, в которых доступные настройки дальности ограничены или принудительно установлены на определённое значение.
Текущая дальность радара зажжёт соответствующий индикатор дальности, а также отобразит числовое значение на дисплее DSCG в левом верхнем углу.

Значения до 50 морских миль указываются как перехват (AI) и доступны для автоматического отслеживания](air_to_air.md#track). Значения 100 морских миль и 200 морских миль доступны для режима Spotlight.
Управление поляризацией

Поляризацию радиочастотной энергии можно изменить с помощью регулятора поляризации. При нормальной эксплуатации используется настройка LIN, которая создаёт линейно поляризованную радиочастотную (RF) энергию в вертикальном направлении относительно антенны. Это сводит к минимуму отражения от земли, так как многие типы помех от земли менее отражают вертикально поляризованную радиочастотную энергию. Однако, поскольку антенна не стабилизирована по крену, при крене самолёта может наблюдаться повышенная интенсивность отражения.
Оба положения CIR 1 и CIR 2 являются циркулярно поляризованными. Осадки меньше отражают циркулярно поляризованную RF, поэтому CIR 1 и CIR 2 могут помочь минимизировать помехи от дождя или тумана.
Поляризация устанавливается с помощью четвертьволновой пластины в облучателе, которая приводит к поляризации излучения непрерывных волн как описано выше. Это делает только CIR 1 совместимым с запуском AIM-7 Sparrow, так как задняя антенна Sparrow не может принимать RF с левой круговой поляризацией.
| Выбор | Поляризация радиочастотной энергии | Наведение AIM-7 |
|---|---|---|
| LIN | Линейно поляризованная в вертикальной ориентации | ✅ |
| CIR 1 | Циркулярно поляризованная с правой круговой поляризацией | ✅ |
| CIR 2 | Циркулярно поляризованная с левой круговой поляризацией | ❌ |
💡 С Sparrow можно использовать только режимы LIN и CIR 1, Sparrow, запущенный с помощью CIR 2, не будет наводиться.
Переключатель манёвра

Переключатель манёвра используется для задания реакции отслеживания на ускорения цели.
| Выбор | Описание |
|---|---|
| LOW G | Положение по умолчанию. Ограничивает ускорения отслеживания, чтобы уменьшить реакцию на средства противодействия и помехи. |
| HI G | Позволяет контуру отслеживания реагировать на любое ускорение. |
HI G включается принудительно при использовании автоматического захвата.
Переключатель сканирования

Переключатель сканирования задаёт количество полос по углу места, используемых при поиске.
| Выбор | Описание | Общий вертикальный охват (градусы) |
|---|---|---|
| 1 Bar | Сканирует вдоль плоскости радара. | 6,7 (3,7 без нутации) |
| 2 Bar | Сканирование чередуется между 1,875 градуса выше/ниже плоскости радара. | 10,45 |
1 Bar Scan включается автоматически при выборе MAP на ручке режима радара. Для условий BST, AIR-GND и CAGE положение переключателя сканирования не имеет значения.
Aspect

Ручка Aspect используется для подачи на ракеты Sparrow имитированного доплеровского сигнала, когда захват не достигнут, чтобы помочь с захватом Sparrow по скоростному диапазону, когда она должна быть запущена по линии визирования. Когда радар отслеживает цель, рассчитанная (или установленная вручную) скорость сближения используется для установки узкого скоростного диапазона (±150 узлов) вокруг скорости сближения для поиска Sparrow при запуске.
Ручка также управляет режимом отображения цифрового вывода DSCG, пока радар отслеживает цель.
Ниже приведены настройки дисплея и скоростного диапазона для различных положений ручки Aspect, где Vc указывает выбранную скорость сближения для скоростного диапазона, а TAS - истинная воздушная скорость самолёта.
| Выбор | Дисплей DSCG | Настройка скоростного диапазона Sparrow (Vc) |
|---|---|---|
| WIDE | Скорость сближения | Весь спектр Spectrum |
| NOSE | Высота | TAS + 450 ±150 узлов |
| FWD | Aspect | TAS + 240 ±150 узлов |
| AFT | Скорость сближения | TAS - 240 ±150 узлов |
| TAIL | Курс | 0 ±150 узлов |
- Скорость сближения: Отображается в узлах, положительные значения указывают на сближение, а отрицательные значения - на расхождение.
- Высота: Отображается в сотнях футов (при этом последняя цифра всегда равна нулю), например, 20 000 футов над уровнем моря будет отображаться как 200.
- Aspect: Угол между хвостом цели и стреляющим (собственным самолётом), это означает, что если цель летит прямо от него, это 0 градусов, а прямо к нему - 180 градусов. Влево показано отрицательными значениями, а вправо - положительными значениями.
- Курс: Курс отображается в градусах от 000 до 360, при этом последняя цифра всегда равна нулю.
Усиление приёмника (RCVR GAIN)

Спаренные потенциометры RCVR GAIN - FINE сверху и COARSE снизу - обеспечивают возможность регулировки усиления приёмника.
FINE используется для небольших регулировок, а COARSE - для больших регулировок. Дополнительную информацию см. в разделе «Регулировка усиления».
Переключатель отслеживания

Переключатель отслеживания изменяет настройки отслеживания дальности Положение по умолчанию - AUTO, которое обеспечивает нормальное отслеживание дальности с Home on Jam если обнаружена постановка помех.
В случае ошибочного обнаружения постановки помех Home on Jam можно отключить, установив переключатель в положение AOJ OUT.
При необходимости можно использовать ручное отслеживание дальности, установив MANUAL, и в этом случае положение ручки MAN Vc будет использоваться для установки скорости сближения строба отслеживания.
Ручка Display

DSCG может отображать отражения в виде B-индикатора или круговой развёртки (PPI) на дисплее.
На B-индикаторе горизонтальная ось дисплея указывает азимут, а вертикальная ось - наклонную дальность.
На PPI горизонтальная ось - это расстояние слева и справа от самолёта, а вертикальная ось - это расстояние вдоль траектории самолёта.
Также есть две настройки развёртки: NAR и WIDE; NAR - это узкая развёртка 45 градусов, а WIDE - полная развёртка 120 градусов. Подробнее см. Автоматический поиск.
Настройка VI направляет дисплей на предоставление наведения по курсу для профиля перехвата Vis Ident (VI) захваченной цели.
Manual Vc (MAN Vc)

Эта 12-позиционная ручка используется для установки скорости сближения для ручного отслеживания дальности. Два положения против часовой стрелки (1, 2) устанавливают скорость расхождения 100 и 200 узлов соответственно. Положения по часовой стрелке от 0 до 9 устанавливают скорость сближения от 0 до 900 узлов.
Сближение относится к цели, уменьшающейся в дальности, а расхождение - к целям, увеличивающимся в дальности.
Переключатель Pulse

Переключатель Pulse устанавливает импульс и частоту повторения импульсов для радара. Дополнительную информацию см. в разделе «Настройка импульса».
В режиме AIR-GRD и автоматическом захвате переключатель отключается автоматически, и независимо от его настройки включается короткий импульс.
Режимы радара (MODE)

Конкретные режимы работы радара зависят от ручки режима радара, а также от нескольких других условий и переключателей. Полное описание работы радара см. в разделах «Общая работа радара», «Работа радара "воздух-воздух"», «Работа радара "воздух-земля"».
В этом разделе кратко описаны все положения ручки режима радара и ссылки на соответствующие разделы ниже.
Положение BST (Boresight)
BST принудительно переводит радар в состояние визирования.
Это используется, когда цель обнаружена визуально или Sparrow нужно запустить без отслеживания радаром.
Положение RDR (Radar)
Положение RDR переводит радар в автоматический поиск.
Положение MAP
Положение MAP идентично положению RDR и переводит радар в автоматический поиск, за исключением того, что нутация отключена, а схема поиска с 2 полосами недоступна.
Положение AIR GRD (Air to Ground)
Положение AIR-GRD аналогично положению визирования со следующими исключениями:
- Отслеживание угла отключено при отслеживании цели.
- Антенна всегда фиксируется на линии визирования со стабилизацией по сносу.
Положение BEACON
BEACON можно использовать с любым положением ручки Display, кроме VI, по желанию.
Он не отображает отражения радара, а вместо этого прослушивает ответы ответчика от определённого оборудования радиомаяка.
Положение TV
Настройка режима радара TV не используется на самолётах с DSCG; она заменена опцией отображения TV на самой панели DSCG и опцией отображения TV в кабине пилота.
💡 Ракеты AIM-7 разлаживаются и не могут быть перенастроены, когда ручка режима радара находится в положении TV.
Индикатор захвата цели (SKIN TRK)
Индикатор захвата цели загорается, когда радар устанавливает и удерживает автоматический захват цели. Это совпадает с включением символа T на панели DSCG.
Если цель отслеживается вручную или активны условия отслеживания AOJ или HOJ, индикатор не загорится.
Панель управления-мониторинга FCS

Основное назначение панели управления-мониторинга - доступ к встроенной диагностике APQ-120.
Кроме того, на панели установлены вспомогательные органы управления системой - переключатель Vc и переключатель Stab, а также индикатор контроля температуры.
Индикатор Coords
Эта лампа не используется с APQ-120.
Индикатор Temp
Индикатор TEMP (
Если обстоятельства требуют использования радара во время предупреждения о температуре, индикатор следует контролировать на предмет постоянного включения, и радар необходимо выключить как можно скорее.
Ручка выбора измерителя
Шестнадцатипозиционная поворотная ручка (
Каждая позиция имеет двойное назначение, обозначенное двумя наборами значений; когда переключатель измерителя находится в положении VOLT, активно внутреннее кольцо ручки, подавая указанное напряжение выбранной позиции. В положении SIGNALS проверяется внешнее значение тока или сигнала.
Контрольный измеритель

Контрольный измеритель (
Напряжения подтверждаются, начиная с положения -250 ручки выбора и переключателя измерителя в положении VOLT, и будут отображаться в области «1» прибора примерно через тридцать секунд после включения питания радара, сигнализируя о правильной подаче напряжения. После этого включения контрольный измеритель будет показывать значение в области «1» для номинальной работы, если подаваемые напряжения правильные. Выбор +35 является исключением из этого правила, так как значение для правильной работы составляет 2,0 или больше.
В режиме SIGNALS ток кристаллов RX1-RX4 работает правильно при значении в области XTAL.
Тесты EX1 и 2 проверяют кристаллы управления электрической частотой и также являются номинальными при возврате XTAL.
Для магнетрона, проверяемого в MAG, работа с длинным импульсом подтверждается значением от 1,4 до 1,8, а работа с коротким импульсом правильна при значении от 0,9 до 1,15.
KLY, который проверяет передатчик CW, должен показывать значение от 0,25 до 1,25 при правильном излучении.
TP 1 проверяет блокировки температуры и давления, и контрольный измеритель показывает 1, когда блокировки замкнуты и работают.
TP 2 подтверждает давление в волноводе, и значение 1 является правильным.
В LOB стрелка измерителя будет перемещаться примерно между 1,5 и 2,8 в зависимости от нутации антенны.
Наконец, селекторы LIN и CIR подтверждают правильную работу линейного и циркулярного импульса; они регистрируют значение 1 только для передачи энергии с вертикальной или правой круговой поляризацией. То есть они не возвращают значение в режиме CIR pulse (левая круговая поляризация).
Ручка встроенного тестирования APQ-120

Подтверждение правильной работы системы выполняется с помощью различных опций на панели управления-мониторинга; конкретные режимы тестирования определяются с помощью ручки тестирования (
Переключатель измерителя

Связанный с ручкой выбора измерителя, двухпозиционный переключатель (
Переключатель Vc

С выбором 900 и 2700 переключатель (
💡 При установленной более новой DSCG переключатель должен всегда оставаться в положении 2700, чтобы обеспечить правильные показания на дисплее.
Переключатель Stab
Переключатель STAB (
В положении STAB OUT стабилизация по тангажу, крену и сносу INS удаляется с антенны радара.
DRIFT OUT поддерживает стабилизацию по тангажу и крену, удаляя при этом компенсацию сноса INS в режимах, которые её используют.
Цифровое устройство преобразования развёртки (DSCG)

Цифровое устройство преобразования развёртки (DSCG) обеспечивает интегрированную систему отображения радара и электрооптических систем F-4E. Система состоит из индикаторов переднего и заднего сидений и управляется блоком управления индикатором (ICU), который выполняет преобразование радиолокационных и видеосигналов, а также применение информационной и управляющей символики
Ручка Grid
В левом верхнем углу дисплея находится ручка, которая регулирует яркость сетки поля зрения.
Индикатор HOJ (H)
Индикатор HOJ в левом верхнем углу дисплея загорается, чтобы указать, что радар перешёл в режим отслеживания угла HOJ, используя только запомненную информацию о дальности и скорости сближения, если обнаружена постановка помех.
Шкала
В правом верхнем углу дисплея находится ручка, которая регулирует яркость шкал угла и угла места, окружающих поле зрения дисплея DSCG.
Индикатор Track (T)
Индикатор Track в правом верхнем углу дисплея загорается, чтобы подтвердить захват цели по углу и дальности. То же, что и индикатор SKIN TRK. Дополнительную информацию см. в разделе Track.
Контрастность (CONTR)
Ручка контрастности (
Дальность (RNG)
Ручка дальности (
Яркость (BRT)
Ручка яркости (
Смещение (OFS)
Ручка смещения (
Ручка режима DSCG
Ручка режима DSCG (
- OFF отключает питание дисплея, прекращая работу всех функций DSCG.
- STBY (ожидание) переводит DSCG в режим прогрева; во время этого процесса дисплей не работает.
- DSCG TEST отображает тестовое поле для проверки правильной работы дисплея. Поле зрения DSCG отображает дисплей поиска с восемью оттенками серого, чтобы подтвердить правильную работу и контрастность. Перед входом в этот режим для тестирования следует выбрать дальность 10 для правильного размера затенённых полей.
- RDR BIT - это режим встроенного тестирования, который работает совместно с радаром для калибровки сигналов, подаваемых с радара на ICU DSCG.
- RDR - это рабочий режим для использования с APQ-120.
- TV - это режим отображения, используемый для электрооптического оружия (Maverick, Pave Spike) и TISEO.
Ручка управления антенной

Ручка управления антенной - это джойстик, расположенный только в кабине WSO на правой консоли; ручка интегрирована с радаром для управления положением символа захвата на радиолокационном дисплее в режимах "воздух-воздух" по дальности (вперёд и назад) и азимуту (влево и вправо), а также направлением головки самонаведения и электрооптического датчика с помощью Maverick и Pave Spike.
Кроме того, джойстик включает в себя колесо управления углом места антенны (
В позиции указательного пальца ручки управления антенной находится переключатель Action (
Кнопка Challenge (
Подробнее о том, как ручка используется для управления оружием, см. в разделе AGM-65 Maverick а о её взаимодействии с Pave Spike - в главе Pave Spike.
Индикатор дальности VISIDENT

Индикатор дальности радара используется для профилей перехвата VID на близком расстоянии, предоставляя информацию о дальности до двух миль и информацию о скорости сближения с расстояния 9000 футов. Информация подтверждается как точная по радару, как только индикатор дальности перескакивает на 9.
Прибор работает в режимах отображения VI, B NAR и B WIDE; индикатор не работает в режимах "воздух-земля".
Кнопка "воздух-воздух"

Кнопка "воздух-воздух" - это кнопка и индикатор, основная функция которых - подтверждение входа в режим CAGE.
Когда экипаж хочет выйти из режима CAGE, WSO может нажать на индикатор, чтобы выйти из режима CAGE и вернуться к текущим выбранным настройкам из набора управления радаром.
Общая работа радара
Магнетрон и клистрон

Магнетрон и клистрон - это два метода генерации радиочастотной энергии в радаре APQ-120. Как магнетронное, так и клистронное излучение подаётся через антенну и излучается из облучателя.
Магнетрон
Магнетрон - это основной излучатель радиочастот для радара. Он генерирует импульсную энергию, которая используется для обнаружения и отслеживания целей.
Излучение магнетрона присутствует только тогда, когда ручка питания радара находится в положении OPER или EMER, и все блокировки, описанные ниже, удовлетворены.
Магнетрон защищён реле давления волновода и температурной блокировкой. Если любая из этих блокировок разомкнута (возможно, из-за повреждения или неисправности), ручку питания радара можно перевести в положение EMER, чтобы восстановить работу; однако работа магнетрона без надлежащего давления или охлаждения может привести к повреждению магнетрона и обгоранию облучателя.
Магнетрон не включается до тех пор, пока не пройдёт 3 минуты после включения радара. Это можно переопределить, переведя ручку питания радара в положение EMER; однако работа магнетрона без достаточного прогрева может привести к неправильной длительности и синхронизации импульса и/или снижению мощности импульса.
Клистрон
Клистрон генерирует радиочастотную энергию непрерывных волн, которая используется для настройки и наведения Sparrow.
Излучение клистрона присутствует, когда ручка питания радара находится в положении STBY, OPER или EMER, переключатель питания радиолокационных ракет находится в положении CW, и все блокировки, описанные ниже, удовлетворены.
Клистрон защищён двумя температурными реле, реле давления и реле броска тока. Если любая из этих блокировок (за исключением реле броска тока) разомкнута, ручку питания радара можно перевести в положение EMER, чтобы восстановить работу; однако это может привести к повреждению клистрона и облучателя.
Клистрон не включается до тех пор, пока не пройдёт 100 секунд после включения радара. Это можно переопределить, переведя ручку питания радара в положение EMER; однако работа клистрона без достаточного прогрева может привести к снижению мощности.
Нutation облучателя
Нutation облучателя необходима для автоматического отслеживания. Облучатель совершает nutation, чтобы вращать излучаемую энергию вокруг оси антенны. Это модулирует отражения радара. Там, где отражение сильнее всего, антенна будет поворачиваться при отслеживании, это возвращает антенну на отслеживаемую цель.
Побочным эффектом этой nutation является увеличение ширины луча с 3,7 градуса (половинная мощность) до 6,7 градуса (полная мощность) при одновременном снижении средней интенсивности луча.
Ниже описаны настройки nutation для переключателя Action.
| Ручка Mode | Ручка Range | Переключатель Action | Nutation |
|---|---|---|---|
| RDR, BST, AIR-GND | ВСЕ | Отпущен | ✅ |
| MAP | ВСЕ | Отпущен | ❌ |
| MAP-PPI | ВСЕ | Полунажатие или полное нажатие | ❌ |
| RDR, MAP-B, BST, AIR-GND | AI | Полунажатие или полное нажатие | ✅ |
| Не AI | Полунажатие | ✅ | |
| Полное нажатие | ❌ |
Стабилизация антенны
Существует три режима стабилизации антенны. Два применяются к работе "воздух-воздух" а другой - к работе "воздух-земля".
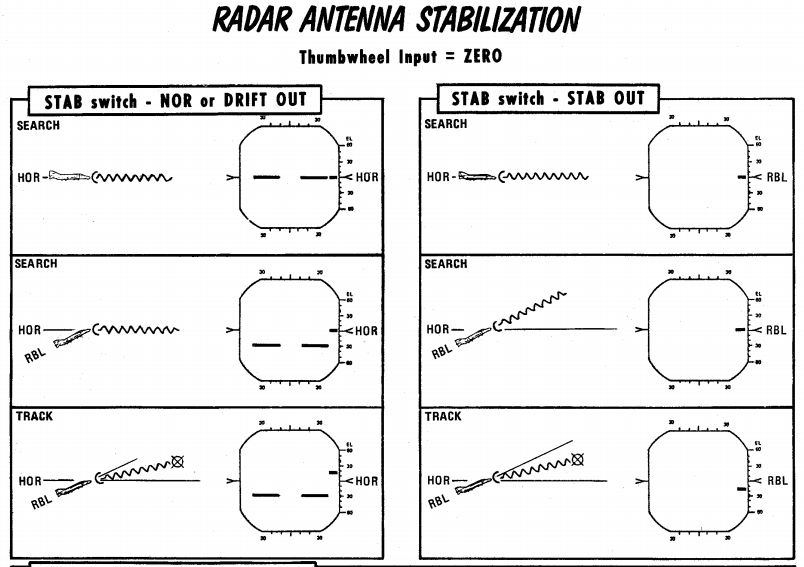
NOR
Нормальная работа стабилизации антенны.
При автоматическом поиске антенна стабилизируется по тангажу и крену относительно горизонта (плоскости радара). Центр сканирования радара находится вдоль курса самолёта. В этом режиме нулевая отметка на дисплее указывает на горизонт.
При измерении дальности "воздух-земля" антенна совмещается с линией визирования радара, но стабилизируется по сносу.
DRIFT OUT
То же, что и NOR, но стабилизация по сносу удалена.
STAB OUT
При автоматическом поиске антенна не стабилизируется относительно горизонта, а вместо этого стабилизируется относительно самолёта.
При измерении дальности "воздух-земля" антенна совмещается с линией визирования радара без стабилизации по сносу. В этом режиме нулевая отметка на дисплее указывает на линию визирования радара.
Настройка импульса
Настройка импульса определяет несколько характеристик радара. К ним относятся длительность излучаемого импульса, какой усилитель используется для усиления сигналов, частота, с которой излучаются импульсы (т.е. частота повторения импульсов).
Настройка управляется переключателем Pulse который можно установить в режим LONG или SHORT.
| Режим | Усилитель | Настройка частоты повторения импульсов (PRF) (Гц) | Длительность импульса (микросекунды) |
|---|---|---|---|
| LONG | Узкополосный | 370 | 2.0 |
| SHORT | Обратное смещение | 1060 | 0.4 |
💡 Режим AIR-GRD и режим автоматического захвата принудительно устанавливают настройку импульса в SHORT.
Настройка AUTO включает переключение режима уровня мощности (PLMS), описанное ниже.
Переключение режима уровня мощности
Переключение режима уровня мощности автоматически выбирает усилители LONG или SHORT, а также узкополосный или с обратным смещением, в зависимости от нескольких условий, таких как дальность до цели, сила отражения или уровень шума.
Регулировка усиления
Усиление сигналов, поступающих на приёмник, называется усилением. Настройка усиления важна как для поиска, так и для отслеживания, и является основным средством для экипажа для обнаружения целей на дисплее.
Ручная регулировка усиления
Усиление можно регулировать вручную. Это изменяет отображение отражений. Более высокие настройки усиления усиливают все отражения, но могут привести к шуму и насыщению, что приведёт к ухудшению изображения. Более низкие настройки усиления приведут к лучшему контрасту цели; однако слабые отражения не будут видны, это может ухудшить дальность обнаружения.
| Слишком большое усиление | Идеальное усиление (2 цели) |
|---|---|
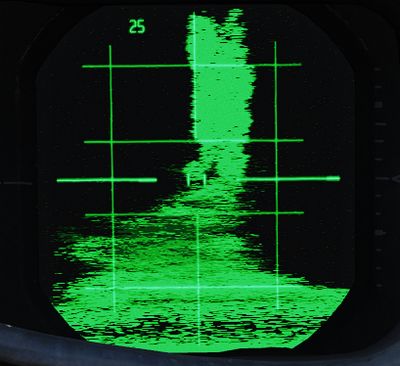 |  |
Когда радар захватывает цель, управление усилением переключается на цепь автоматической регулировки усиления и ручная регулировка усиления больше не используется.
💡 Выбор правильного усиления - это баланс, который приходит с опытом, как правило, для поиска усиление следует увеличивать до тех пор, пока не начнёт появляться небольшое количество шума (случайные точки).
Наряду с усилением приёмника дисплей также имеет выравнивание изображения, после регулировки усиления может потребоваться несколько сканирований, чтобы изображение правильно отрегулировало уровень.
Автоматическая регулировка усиления
Автоматическая регулировка усиления берёт на себя управление настройкой усиления, как только радар захватывает цель. Усиление регулируется автоматически с помощью цели в пределах строба отслеживания дальности, чтобы обеспечить постоянный сигнал цели для отслеживания.
Временная регулировка чувствительности (STC)
Сила отражения радара падает с 1 / r^4 где r - дальность. Это означает, что на обычном дисплее яркость отражений радара будет уменьшаться с расстоянием.
Для картографирования земли APQ-120 противодействует этому эффекту. Когда ручка режима радара находится в положении MAP, а ручка Display - в режиме PPI, включается временная регулировка чувствительности.
Когда она включена, она экспоненциально увеличивает усиление приёмника с увеличением дальности, чтобы противодействовать падению мощности отражения с увеличением дальности. Это обеспечивает примерно одинаковую яркость с увеличением дальности.
Работа радара "воздух-воздух"
Работа радара "воздух-воздух" включает в себя режимы RDR-B и MAP-B, а также режим BST. RDR-B и MAP-B можно использовать с автоматическим поиском, а режим BST можно использовать как режим ближнего боя для захвата цели по линии визирования.
Автоматический поиск
Во время автоматического поиска антенна перемещается вперёд и назад в плоскости радара. Пределы этого поиска определяются ручкой Display. Поиск обычно проводится в секторе 120 градусов, когда ручка Display находится в положениях WIDE, и ограничен 45 градусами в положении NAR. В операциях "воздух-воздух" можно использовать только положения ручки Display с B.
Ручка режима радара knob используется для выбора автоматического поиска путём выбора RDR или MAP. В режиме RDR количество полос можно выбрать переключателем сканирования. В режиме MAP используется только 1 полоса независимо от положения переключателя. Нutation облучателя используется с RDR, но не с MAP; это приводит к предполагаемой ширине луча примерно 6,7 градуса в RDR и 3,7 градуса в MAP.
При выборе BST или AIR-GND на ручке режима радара сканирование антенны совмещается с линией визирования радара.
Ниже показана обычная символика, присутствующая в режимах автоматического поиска и визирования.
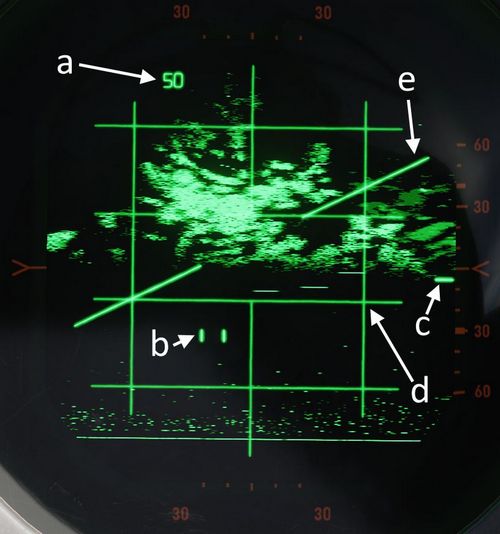
| Элемент | Название | Описание |
|---|---|---|
| a | Индикатор дальности | Показывает текущую выбранную или принудительно установленную дальность. |
| b | Курсор радара | Курсор радара используется для выбора целей и отображает текущую выбранную дальность и азимут. Он перемещается с помощью ручки управления антенной. |
| c | Угол места антенны | Показывает угол места антенны (в градусах) относительно плоскости радара или самолёта, если переключатель Stab находится в положении OUT. Его можно перемещать с помощью колеса угла места ручки управления антенной. |
| d | Сетка радара | Левая и правая вертикальные линии показывают 30 градусов влево и 30 градусов вправо. Это измерение относительно плоскости радара, когда переключатель Stab находится в положении NOR или DRIFT OUT, и относительно самолёта, когда переключатель Stab находится в положении OUT. Каждая горизонтальная линия отмечает шкалу, где промежутки составляют 1/5 текущей настройки дальности дисплея. |
| e | Линия горизонта | Показывает линию горизонта, присутствует только при установке переключателя Stab в положение NOR или DRIFT OUT. |
Захват
Захват можно использовать с любым режимом радара, который использует B-индикатор, и он используется для достижения условия отслеживания.
Когда ручка режима радара находится в положении RDR или MAP, можно удерживать полунажатие на спусковом крючке ручки управления антенной, чтобы начать захват. В режиме RDR или MAP азимут антенны будет следовать за символом захвата. Во всех режимах, где можно использовать захват, дальность символа захвата будет устанавливать желаемую дальность для захвата.
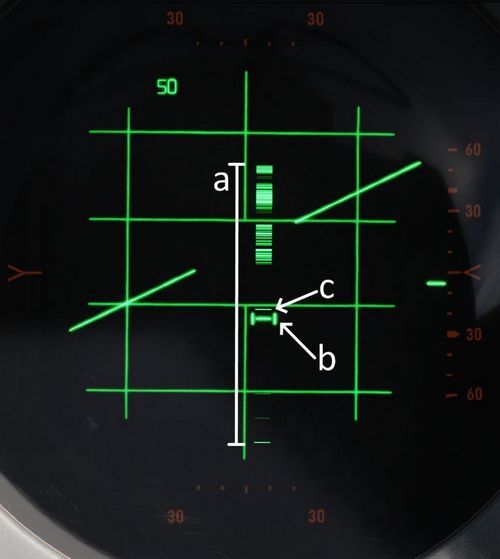
| Элемент | Название | Описание |
|---|---|---|
| a | B-развёртка | B-развёртка отображает текущие отражения радара вдоль азимута антенны, они отображаются как при захвате, так и при отслеживании. |
| b | Символ захвата | Как и курсор радара, символ захвата показывает текущий выбранный азимут и дальность. Он перемещается с помощью ручки управления антенной. Он также отображается при отслеживании, чтобы указать дальность и азимут цели. |
| c | Отражение цели | Отражение цели отображается вдоль азимута. |
Отслеживание
Автоматическое отслеживание можно включить, сначала войдя в режим захвата, а затем, как только цель будет захвачена символом захвата, нажав полное нажатие, чтобы войти в режим автоматического отслеживания.
Тип отслеживания зависит от выбранного режима. Доступны два типа схем отслеживания: отслеживание угла и отслеживание дальности. Они оба будут описаны ниже.

| Элемент | Название | Описание |
|---|---|---|
| a | Показания дисплея | Показания зависят от положения переключателя Aspect. |
| b | Допустимая ошибка наведения | Описывает максимальную зону запуска вне угла, см. «Допустимая ошибка наведения». |
| c и e | Стробы дальности | Указывают на зону запуска, см. Описание «Стробов дальности». |
| d | Точка прицеливания | Обеспечивает наведение пилота, см. «Точка прицеливания». |
В правом верхнем углу экрана радара находится выгравированный символ T, который загорается, если присутствует условие отслеживания дальности. Это есть только на экране WSO.
Отслеживание угла
Схема отслеживания угла поворачивает антенну, чтобы удерживать цель в центре. Она делает это, используя nutation облучателя (коническое сканирование). Антенна поворачивается в направлении наибольшей амплитуды в схеме сканирования nutation. В результате отслеживание угла невозможно без nutation (MAP-B начинает nutation при использовании захвата).
Отслеживание угла имеет две настройки, устанавливаемые переключателем манёвра: HI G и LOW G. Они устанавливают ограничения на ускорение в схемах отслеживания угла.
Наведение антенны имеет несколько важных функций:
- Отслеживание местоположения цели по углу места и азимуту.
- Предоставление углов наведения головки Sparrow для захвата цели.
- Освещение цели радиочастотной энергией непрерывных волн для наведения Sparrow.
Отслеживание дальности
Радар использует строб дальности для выбора цели по дальности. Он использует только отражения радара в пределах строба дальности для своих схем. Это помогает устранить помехи и другие цели, а также позволяет схемам отслеживания угла точно отслеживать интересующую цель без ошибочных сигналов.
При отслеживании дальности строб дальности использует отражения радара для автоматической коррекции любой ошибки между стробом дальности и отражением цели. Это приводит к перемещению строба дальности; скорость, с которой перемещается строб, - это скорость сближения, которая отображается на экране. Это также используется для подачи на Sparrow скорости сближения для установки её скоростного диапазона для отслеживания цели.
Отслеживание дальности может работать в режиме памяти. В режиме памяти строб дальности будет продолжать двигаться вниз с последней рассчитанной скоростью сближения. Когда это происходит, индикаторы SKIN TRK и T на DSCG погаснут, а цифры скорости сближения начнут мигать с частотой 4 Гц. Если режим памяти был включён из-за потери цели, система сбросит захват, если цель не появится снова в течение 5 секунд.
Режим памяти будет включён при следующих условиях:
- Выбран ручной поиск (переключатель Track))
- Цель потеряна.
- Обнаружена постановка помех.
Home On Jam
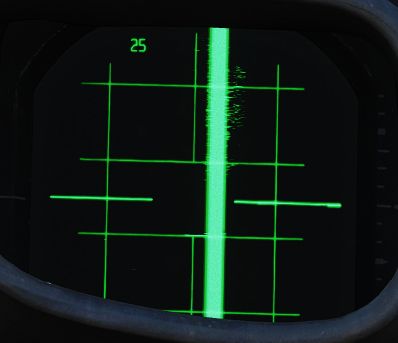
Усилитель с обратным смещением в радаре генерирует сигнал шума на основе общей силы отражений. Как только этот сигнал шума превысит определённый порог, система сочтёт это состоянием постановки помех и включит Home On Jam. Схема отслеживания дальности переходит в режим памяти, схема отслеживания угла продолжает работать и отслеживать цель постановки помех по углу места и азимуту.

Состояние Home On Jam также обозначается выгравированной буквой H на DSCG WSO, а последняя нулевая цифра скорости сближения заменяется буквой H, при этом скорость сближения мигает.
Spotlight
На дальностях 100 и 200 миль можно использовать процедуру, известную как Spotlight, для ручного поддержания радиолокационного наблюдения за целью.
Spotlight заключается в размещении курсора захвата над желаемым отражением, а затем выборе и удержании положения полного нажатия спускового крючка ручки управления антенной. При этом антенна будет совершать nutation и вернётся к выбранному положению переключателя Polar для повышения чёткости изображения цели, но без попытки автоматического захвата.
Цель можно поддерживать в хорошо наблюдаемом состоянии, удерживая полное нажатие и следуя за отражением цели с помощью ручки управления антенной, пока она не достигнет дальности, на которой можно выполнить захват (с соответствующим изменением настройки дальности; радар не может попытаться выполнить захват при несовместимой настройке дальности).
Расчёты перехвата
Компьютер перехвата LRU-1 может рассчитывать зоны запуска для ракет Sparrow и Sidewinder.
Стробы дальности
DSCG может отображать два строба дальности одновременно, представляющих зону запуска ракеты. Существует три возможных типа стробов.
| Индикация дальности | Описание |
|---|---|
| Rmax | Максимальная дальность действия ракеты при условии, что цель продолжает лететь по текущему курсу и траектории. |
| Rmax2 | Максимальная дальность действия ракеты, если цель выполняет кратчайший поворот с большой перегрузкой к хвостовому аспекту. |
| Rmin | Минимальная дальность действия ракеты. |
| Выбранная ракета | Отображаемые стробы |
|---|---|
| Sparrow | Rmax и Rmax2 |
| Sidewinder | Rmax и Rmin |

Все дальности рассчитываются для момента нажатия и удержания спускового крючка для запуска, а не для момента, когда фактический сигнал запуска отправляется через несколько секунд. Это означает, что если зона запуска ракеты выполнена на дисплее, то можно нажать на спусковой крючок, и зона запуска будет действительна для запуска ракеты.
Круг допустимой ошибки наведения (ASE)
Допустимая ошибка наведения указывает максимальное упреждение или запаздывание, при котором можно запустить ракету, и она всё равно сохранит высокую вероятность попадания. Диаметр круга постепенно увеличивается, как только достигается Rmax, и постепенно начинает уменьшаться по мере приближения дальности до цели к Rmin.
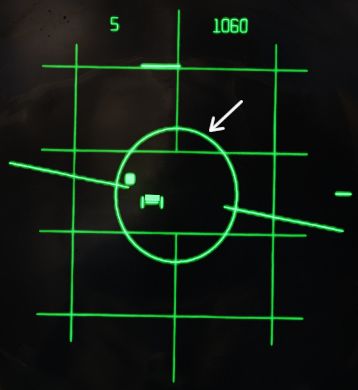
При выбранной Sparrow максимальный размер круга ASE составляет 25 градусов для AIM-7E и 35 градусов для AIM-7F.
При выбранной Sidewinder, если она зафиксирована, размер круга ASE фиксируется на уровне 1,2 градуса. Если она не зафиксирована, круг ASE динамически изменяет свой размер, как описано выше, при этом максимальный диаметр составляет 25 градусов.
Точка прицеливания

Точка прицеливания предоставляет команды наведения пилоту. Существует три разных типа:
- Наведение на столкновение, оно сводит к минимуму время перехвата, устанавливая истребитель на курс перехвата.
- Переходное наведение, оно начинается за 2 морские мили до Rmax и направляет самолёт к следующему типу наведения.
- Упреждающее преследование, внутри Rmax упреждающее преследование сводит к минимуму манёвры ракеты после запуска.
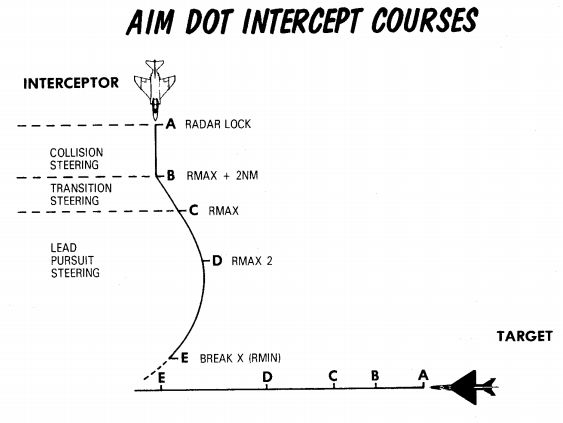
Индикаторы Shoot/In Range
Индикаторы Shoot загораются при выполнении следующих условий:
- Точка прицеливания находится внутри круга ASE.
- Цель находится в пределах Rmax и Rmin.
Если выбраны Sparrow, то индикаторы Shoot также блокируются, когда аспект цели составляет 90 ±9 градусов (влево или вправо), а цель находится ниже 5 градусов над горизонтом. Это предотвращает стрельбу Sparrow в помехи главного лепестка.
💡 Когда ручка яркости пилотажных приборов находится вне крайнего положения против часовой стрелки, например, во время полётов ночью, все индикаторы SHOOT будут оставаться выключенными. Блокировки запуска на это не влияют.
Индикатор удержания высоты
Индикатор удержания высоты загорается при выполнении следующих условий:
- Дальность больше, чем рассчитанная дальность перехвата с набором высоты.
- Высота более 32 000 футов.
- Цель находится более чем на 8000 футов выше истребителя.
Когда индикатор горит, ошибку азимута в точке прицеливания следует корректировать только тогда, когда индикатор гаснет. Истребитель должен резко набрать высоту, чтобы центрировать точку прицеливания.
Break X
Во всех режимах (кроме VI), когда цель находится на меньшей дальности, чем рассчитанный Rmin, будет отображаться символ Break X, чтобы указать на условие минимальной дальности.
В режиме визуального перехвата (VI) Break X отображается, когда дальность менее 1000 футов.
Когда отображается Break X, круг ASE также удаляется.
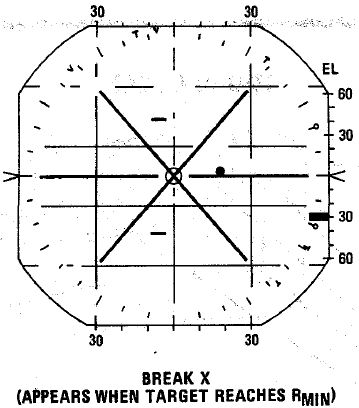
Блокировки запуска
Существует несколько блокировок, предотвращающих запуск ракет в неблагоприятных условиях.
Для Sidewinder единственной блокировкой, предотвращающей запуск ракеты, является выпущенные закрылки.
Для Sparrow существует несколько условий:
- Точка прицеливания должна находиться внутри круга ASE.
- Индикаторы In Range и Shoot должны гореть.
- Не должно быть условия Break X.
- Выбранный режим не должен быть визуальным перехватом.
💡 Обратите внимание, что индикаторы SHOOT остаются выключенными, когда ручка яркости пилотажных приборов находится вне крайнего положения против часовой стрелки. Блокировки запуска на это не влияют.
Блокировки отключаются автоматически при условии HOJ или когда Sparrow нужно запустить в режиме визирования. Блокировки можно отключить вручную с помощью переключателя блокировки.
Состояние визирования и CAGE
Визирование
В режим визирования можно войти, либо переведя ручку Mode в положение BST, либо нажав кнопку CAGE на РУДе. Последнее действие включает состояние CAGE, которое очень похоже на визирование, включённое через BST, за исключением того, что состояние CAGE ограничивает дальность до 5 морских миль и принудительно устанавливает настройку манёвра в положение HI.
В режиме визирования антенна фиксируется вдоль линии визирования радара, а отражения радара отображаются на индикаторе, как в режиме захвата. Захват можно включить полунажатием, как при автоматическом поиске, чтобы захватить цель, а затем полным нажатием можно запустить отслеживание. Отслеживание дальности и угла начнётся как обычно.
Sparrows можно запускать без отслеживания цели. В этом случае пилот должен разместить цель на визирной марке прицела, а WSO может выбрать подходящую настройку Aspect. Теперь можно запустить Sparrow.
💡 Цели должны находиться в пределах зоны 5 градусов, иначе попытка захвата, скорее всего, приведёт к плохому захвату.
Состояние CAGE
Состояние CAGE - это режим ближнего боя, который можно включить в любое время, нажав кнопку CAGE на РУДе пилота. По умолчанию это переводит радар в режим визирования, как описано выше.
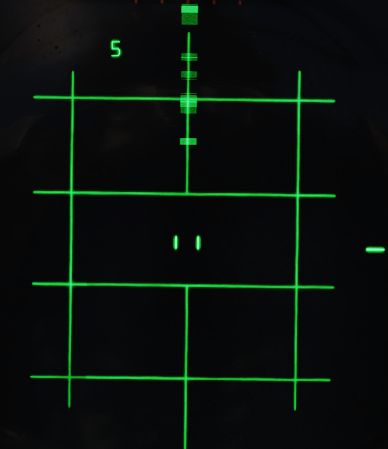
Когда активно состояние CAGE, происходят следующие изменения:
- Индикатор "воздух-воздух" в задней кабине загорается.
- Управление спусковым крючком передаётся оружию "воздух-воздух" (в том числе когда выбраны ARM и TV).
- Оптический прицел переключается в режим A/A.
- Становится доступным автоматический захват.
Если условие отслеживания существует до нажатия кнопки CAGE, а мизинцевый переключатель на РУДе находится в положении RADAR или HEAT, радар срывает захват и возвращается к визированию. Если мизинцевый переключатель находится в положении GUNS, захват не срывается.
Выйти из режима CAGE можно из любой кабины. Пилот может установить ручку выбора оружия в положение B или вывести её из него. Если пилот оставит ручку выбора оружия в положении B, это не помешает последующему входу в режим CAGE. WSO может выйти из режима CAGE, нажав кнопку "воздух-воздух".
Режим автоматического захвата (CAA)
После входа в режим CAGE радар можно перевести в режим автоматического захвата с помощью кнопки управления носовой стойкой шасси на ручке управления. В режиме CAA радар переходит в схему сканирования с вертикальной ориентацией высотой 78 градусов и шириной 15 градусов, сканирование проводится 3 вертикальными полосами. Фактическая возможность захвата радаром в пределах этой схемы сканирования составляет от +45 градусов над линией горизонта до -9 градусов ниже линии горизонта из-за ограничения программного обеспечения APQ. В случае, если радар обнаружит подходящую цель в пределах объёма сканирования, цель будет захвачена. Если экипаж обнаружит, что захваченная цель не та, которую нужно было захватить, можно нажать кнопку управления носовой стойкой шасси на любой ручке управления, чтобы вернуть радар обратно в схему поиска.
В режиме CAA схему поиска радара можно смещать влево и вправо с помощью мизинцевого переключателя на РУДе.
| Выбор мизинцевого переключателя | Центр сканирования |
|---|---|
| Guns | Лево (-15 градусов) |
| Heat | Центр (0 градусов) |
| Radar | Право (+15 градусов) |
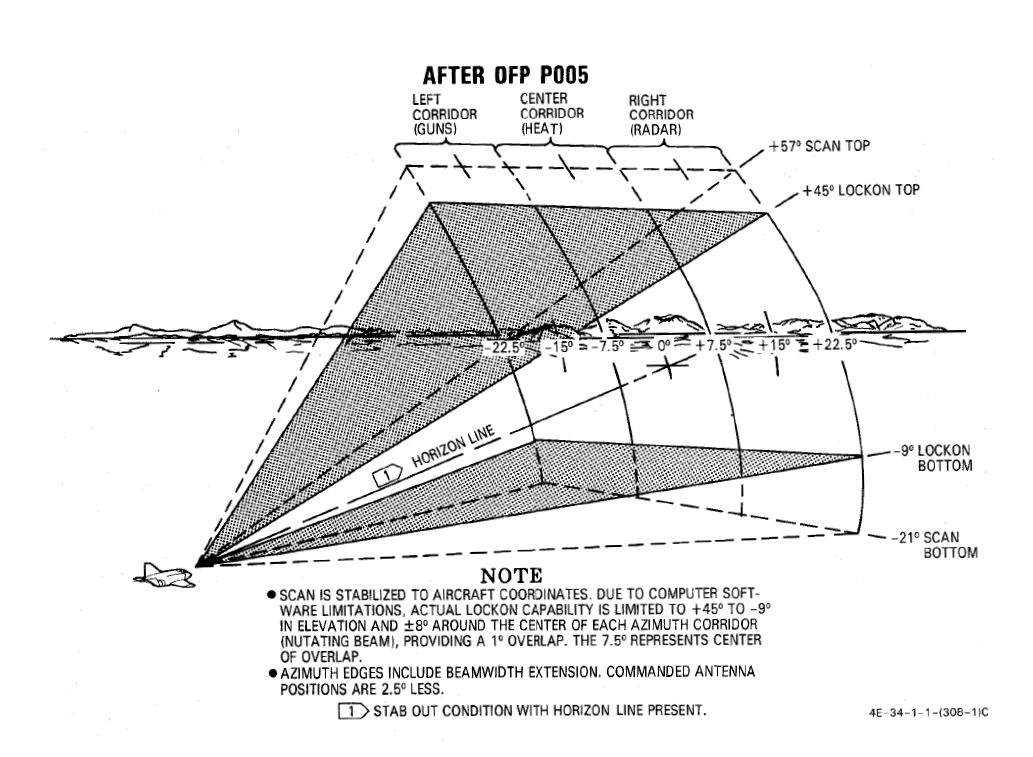
Чтобы выйти из CAA, пилот может выбрать положение B на ручке выбора оружия, или WSO может нажать кнопку "воздух-воздух". Если на момент выхода из режима существует захват радара, он будет сохранён.
Работа радара "воздух-земля"
Работа радара "воздух-земля" включает в себя режим AIR-GRD, а также RDR-PPI и MAP-PPI.
Режим AIR-GRD используется как форма измерения дальности радаром для режима Dive Toss WRCS. RDR-PPI и MAP-PPI используются для режимов бомбометания со смещением и поиска цели WRCS.
Измерение дальности "воздух-земля"
Режим AIR-GRD доступен, когда ручка Mode находится в положении AIR-GRD. AIR-GRD используется для измерения дальности "воздух-земля" и доступен только на дальностях AI. В этом режиме антенна фиксируется на линии визирования радара, при этом стабилизируясь по сносу, эту коррекцию сноса можно удалить, установив Drift Out на переключателе Stab в случае неисправности INS.

Режим AIR-GRD отключает работу отслеживания угла и использует только отслеживание дальности. После захвата помех главного лепестка (отражение радара от земли) он будет отслеживаться по дальности.
Чтобы использовать AIR-GRD, следует выбрать дальность 5 или 10 морских миль. Как только цель будет идентифицирована, пилот должен выполнить пикирование на 10-40 градусов в сторону цели. Усиление приёмника следует уменьшить, чтобы создать сигнал помех примерно 1/2 морской мили. Это делается для того, чтобы предотвратить ошибочное отслеживание боковых лепестков, что приведёт к неправильной информации о дальности.
При захвате отражения курсор следует разместить примерно в центре отражения. Полёт под малыми углами ещё больше растянет отражение, требуя захвата примерно одной трети отражения.
Процедура захвата AIR-GRD следующая:
- Отрегулируйте усиление приёмника, чтобы уменьшить сигнал помех до 1/2 морской мили.
- Разместите строб дальности над сигналом помех.
- Нажмите переключатель Action на полунажатие, а затем на полное нажатие. Отпустите после того, как появится круг ASE.
- Подтвердите захват.
💡 Радар может отслеживать помехи от земли с высоты более 25 000 футов; однако он ограничен тем же числом, которое можно ввести в WRCS.
Иногда может происходить ложное отслеживание, о чём свидетельствует быстрое уменьшение наклонной дальности, отображаемой на оптическом прицеле или радаре.
Чтобы исправить это состояние, можно выполнить следующие действия:
- Нажмите переключатель Action на полунажатие, отпустите.
- Снова начните процесс захвата.
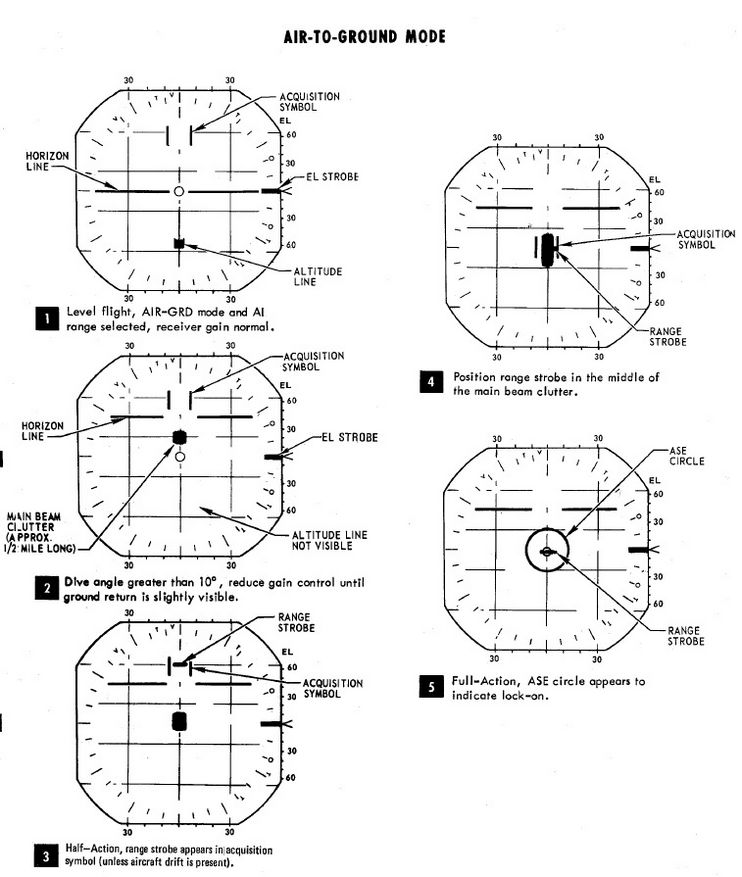
Режим карты (PPI)
Режим карты радара PPI (круговая развёртка) - это дисплей, который показывает отражения радара, нанесённые на график с их реальным положением относительно самолёта. Положение самолёта находится внизу по центру дисплея, линии, параллельные вертикальной оси дисплея, параллельны траектории самолёта. Линии, параллельные горизонтальной оси дисплея, смещены от траектории до максимума, равного половине текущей дальности отображения.
Доступ к режиму PPI можно получить, переведя ручку Display в положение PPI-WIDE или PPI-NAR. За исключением 5 морских миль, которые всегда отображаются в интерпретации B-индикатора.
Курсор дальности - это дуга постоянной дальности от самолёта. Курсор смещения - это смещение, параллельное сносу самолёта, которое может быть смещено влево или вправо от текущей траектории самолёта. Курсор смещения и курсор дальности можно отобразить только в режимах PPI.
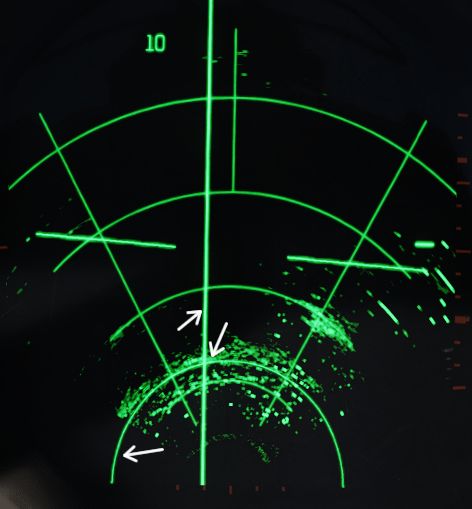
Как курсор дальности, так и курсор смещения отображаются, если режим сброса оружия установлен в TGT FIND или OFFSET, или ручка режима радара установлена в BEACON. Если это не так, то отображается только курсор дальности на фиксированной дальности, которую может регулировать наземный экипаж.
Орган управления Along Track используется для увеличения и уменьшения текущей настройки курсора дальности. Орган управления Cross Track используется для перемещения курсора смещения влево и вправо от траектории самолёта.
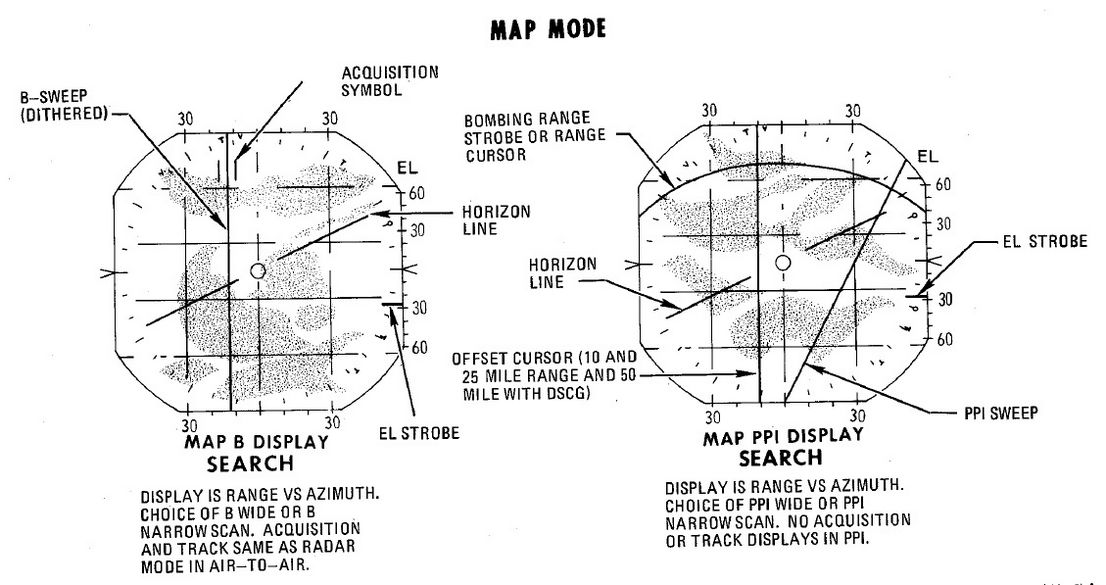
Системы оружия

F-4E имеет две системы, которые помогают пилоту и WSO в операциях "воздух-земля". AN/AJB-7 ARBCS (автоматизированная система управления сбросом) служит автоматизированной системой управления сбросом для бомбометания по времени или тангажу. Она взаимодействует с органами управления многозарядным оружием, настройками оружия на панели пьедесталаи различными боеприпасами, такими как бомбы , бомбы с лазерным наведением или AGM-45.
Вычислитель сброса оружия (WRCS AN/ASQ-91) поддерживает различные режимы доставки как для горизонтальных, так и для пикирующих манёвров. Сигнал сброса оружия генерируется автоматически вычислительной системой, которая использует такие входные данные, как скорости INS дальность до цели по радару и ручные входные данные с органов управления в кабине.
AWRU (автоматический блок сброса оружия) получает рабочее питание, когда на селекторе оружия выбрано BOMBS или RKTS & DISP. Панель управления имеет два регулятора INTRVL и селектор количества (QTY).
Система многозарядного оружия
Система многозарядного оружия предназначена для обеспечения единой точки управления всеми боеприпасами, которые может нести F-4, в отношении включения, активации пилонов, режима доставки и выборочного сброса. Хотя определённые виды оружия могут иметь дополнительные органы управления в других местах кабины в каждом конкретном случае, все указанные функции управляются этой панелью на левой передней консоли в передней кабине.
Переключатель включения носа/хвоста

Начиная с верхней части панели, четырёхпозиционный переключатель включения носа/хвоста выбирает соленоиды для захвата тросика включения на MER и TER, которые затем включают взрыватели в момент сброса. Кроме того, положение переключателя также может определять режим сброса с высоким/низким сопротивлением в полёте для бомб с торможением, таких как Mk 82 Snakeye.
| Название | Описание |
|---|---|
| SAFE | Соленоиды включения не активируются; бомбы сбрасываются с отключённым взрывателем. |
| NOSE | Активируются соленоиды переднего и центрального положения для удержания тросиков включения. |
| TAIL | Активируются соленоиды заднего положения для удержания тросиков включения. |
| NOSE/TAIL | Активируются все соленоиды переднего, центрального и заднего положения для удержания тросиков включения. |
Например, варианты MK-82 Air или Snakeye взорвутся, только если выбран носовой взрыватель, и переключатся между конфигурацией с высоким сопротивлением при установленном хвостовом взрывателе и низким сопротивлением, если он не установлен.
Бомбодержатели MER-10 и TER-9 имеют функцию автоматического шагового режима для автоматического пропуска станций, с которых уже сброшены боеприпасы. Чтобы установить эту функцию, когда выбран режим BOMBS на ручке выбора оружия, переключатель Nose/Tail должен находиться в положении NOSE или NOSE & TAIL для подачи сигналов сброса через установленные MER и TER и пропуска пустых позиций; если система установлена в положение TAIL, необходимо подать дополнительные импульсы сброса с помощью переключателя сброса бомбы, чтобы пройти через пустые станции. Использование MER-10A и TER-9A устраняет это требование.
RKTS и DISP автоматически пропускают пустые станции.
Кнопки выбора станции

С помощью кнопок выбора станции можно выбрать различное вооружение на соответствующих станциях. Это не относится к оружию "воздух-воздух".
Выбор режима - ручка режима доставки

Режим сброса устанавливается с помощью ручки режима доставки. Значения слева от OFF используют автоматизированный вычислитель сброса и привязки к высоте (ARBCS), в то время как значения справа от DIRECT используют вычислитель сброса оружия (WRCS). DIRECT - это режим ручного сброса. TGT FIND работает как навигационный режим и не может подавать сигнал сброса оружия на систему управления огнём, поэтому на практике его можно считать «безопасным» положением.
Значения, по часовой стрелке слева, следующие:
| Название | Описание | Система |
|---|---|---|
| INST O/S | Мгновенный сброс через плечо | ARBCS |
| LOFT | Лофтирование | ARBCS |
| O/S | (Замедленный) сброс через плечо | ARBCS |
| T LAD | Замедленный LADD (сброс с малым углом на парашюте) | ARBCS |
| TL | Замедленный горизонтальный сброс | ARBCS |
| OFF | Выкл. | |
| DIRECT | Ручной | |
| TGT FIND | Поиск цели (только навигация и Pave Spike only) | WRCS |
| DT | Пикирующий сброс | WRCS |
| DL | Пикирующий сброс с выравниванием | WRCS |
| L | Сброс с выравниванием | WRCS |
| OFFSET | Сброс бомб со смещением | WRCS |
| AGM-45 | Сброс AGM-45 | WRCS |
Ручка выбора оружия

Ручка выбора оружия используется для обозначения типа используемого оружия
| Название | Описание |
|---|---|
| RKTS & DISP | Ракеты и контейнеры. Включает цепи сброса AWRU. |
| ARM | AGM-45 Shrike |
| TV | AGM-65 Maverick и другое оружие с электрооптическим наведением. |
| C | Открыто/не используется. Может использоваться как выбор OFF. |
| B | Та же функция, что и у кнопки AIR-TO-AIR в задней кабине. |
| A | Боеприпасы со встроенными интервалометрами (кассетные бомбы или распылительные контейнеры). |
| AGM 12 | AGM-12 Bullpup. |
| BOMBS | Бомбы. Включает цепи сброса AWRU. |
Индикатор наличия центрального бака

Запуск передних ракет AIM-7 может быть заблокирован при определённых условиях на центральной линии из-за возможных проблем с отделением или вероятности воспламенения содержимого центральной позиции. Индикатор CL tank загорится, если существует такое возможное состояние. Условия, которые могут вызвать это, следующие:
-
Топливный бак, бомбодержатели MER или TER: Передние Sparrow нельзя запустить. Индикатор CL tank погаснет, если бак или MER сброшены, что позволит запустить или сбросить Sparrow.
-
Разъём BRU-5/A с одной бомбой или пушечным контейнером: Индикатор CL tank загорится; однако передние Sparrow всё ещё можно запустить или сбросить. Следует обратить внимание на устранение боковых движений крена, пока запущенное оружие не отделится.
-
Разъём Aero-27/A с блоком включения центральной линии (используется для ядерных боеприпасов): Индикатор CL tank загорится. Однако передние AIM-7 нельзя сбросить или запустить до тех пор, пока весь блок не будет удалён вручную после полёта.
Переключатель блокировки
Система управления огнём предоставляет опцию блокировки для запуска AIM-7, чтобы подтвердить выполнение допустимых параметров, и доступ к ней осуществляется с помощью переключателя INTLK. При выбранном IN ракета не запустится при нажатии на спусковой крючок, если не выполнено ни одно из следующих условий:
- Индикатор IN RANGE горит.
- Точка прицеливания цели находится внутри круга ASE (допустимая ошибка наведения) на радиолокационном дисплее.
- Ручка радара не находится в режиме VI.
При установке переключателя INTLK в положение OUT AIM-7 можно запустить в любое время, независимо от состояния текущих параметров относительно цели.
Переключатель INTLK не работает при запуске AIM-9.
Блок сброса оружия (AWRU)

AWRU, используемый в режимах оружия BOMBS и RKTS & DISP, обеспечивает управление интервалом и количеством для сброса боеприпасов. AWRU имеет как ручной, так и автоматический режим, и доступ к результирующей функции осуществляется с помощью соответствующих настроек.
Ручка интервала содержит 14 значений, обеспечивая базовое время интервала импульсов сброса, пока кнопка сброса бомбы удерживается, от 1/20 секунды (0,05) до 1 секунды. Это значение можно умножить на 10 с помощью переключателя INTRVL. В режиме NORM переключателя INTRVL сброс будет выполняться, как указано на ручке интервала, в то время как при выборе x10 будет применяться 10-кратный множитель - например, 1 секунда в NORM станет интервалом 10 секунд в режиме x10.
Ручка количества устанавливает общее количество боеприпасов, сбрасываемых во время удержания кнопки сброса бомбы, и применяет функции ручного или автоматического сброса в зависимости от выбранного значения.
Одиночный ручной сброс: 1
В положении 1 AWRU переводится в ручной режим. Один боеприпас будет сброшен при каждом нажатии кнопки сброса бомбы, при этом сброс с нескольких выбранных станций будет происходить по схеме лево-право-лево. Кнопку сброса бомбы необходимо отпустить, а затем нажать ещё раз, чтобы сбросить ещё один боеприпас.
Одиночный залп: 2-18
В числовых положениях 2-18 будет сброшено до общего количества выбранных боеприпасов в соответствии с настройкой интервала. Например, при количестве 6 и интервале 0,20 будет сброшено шесть бомб, по одной каждые 2/10 секунды с момента нажатия кнопки сброса бомбы. Последовательность будет сброшена при отпускании кнопки, что позволит сбросить последующие залпы того же количества.
Одиночный непрерывный сброс: C
В положении C количество оружия определяется тем, как долго удерживается кнопка сброса бомбы. Залп будет применяться с установленным интервалом, сбрасывая один боеприпас при каждом импульсе, до тех пор, пока не будет отпущена кнопка сброса бомбы.
Ручной сброс парами: P
Положение P переводит AWRU в режим пар. При выборе нескольких станций при каждом нажатии кнопки сброса бомбы будет сбрасываться оружие с каждой станции.
Залп: S
В положении S AWRU переходит в режим залпа, работая как ручной сброс парами с одиночными боеприпасами, сбрасываемыми с каждой станции, но используя установленное значение интервала для сброса нескольких залпов, пока не будет отпущена кнопка сброса бомбы.
Вычислитель сброса оружия (WRCS)

AN/ASQ-91 WRCS обеспечивает возможность F-4E выполнять точный сброс боеприпасов в горизонтальном полёте и при пикировании. Входные данные WRCS устанавливаются с помощью соответствующих панелей в кабинах, и эти команды, наряду с данными INS и дальностью до цели по радару, используются баллистическим компьютером для подачи сигнала сброса.

Органы управления дальностью до цели
Панель управления компьютером, расположенная в задней кабине, имеет три регулятора ввода TARGET, два регулятора RELEASE и настройку коэффициента сопротивления бомбы DRAG COEFFICIENT, а также ручку управления BIT для проверки работы системы. Ввод цели осуществляется относительно заранее определённой IP.
Верхний регулятор дальности предназначен для направления север/юг, а выбор относительного пеленга обозначается префиксом N или S в начале.
Средний регулятор дальности предназначен для направления восток/запад, и, как и предыдущий, префикс E или W на дальности устанавливает относительное направление пеленга.
Последний ввод ALT RANGE предназначен для высоты цели - либо высоты цели или RIP (точка радиолокационного опознавания) над уровнем моря, либо барометрической высоты цели/RIP. В режиме Laydown ввод относится к расстоянию между IP и целью в сотнях футов.
Ввод для север/юг и восток/запад осуществляется с шагом 100 футов, и для этих расстояний можно ввести максимальное значение до 99 900 футов. Ввод ALT RANGE имеет максимум 24 900 футов с шагом 100 футов.
💡 WRCS может быть повреждён, если ввод ALT RANGE больше, чем текущая высота самолёта над уровнем моря (x100) в режимах TGT FIND и OFFSET BOMB.
Регулятор дальности сброса
Регулятор дальности сброса используется для ручной установки дальности бомбометания в десятках футов и доступен в режимах Laydown, Dive Laydown и Offset Bombing. Максимальная настройка - 9990 футов (999x10), а при использовании в режиме доставки WRCS/AJB-7 фактическая дальность может достигать 99 900 футов.
Регулятор Rg не следует устанавливать на то же значение, что и регулятор дальности до цели. В противном случае задержка бомбодержателя может привести к позднему сбросу или его отсутствию.
Регулятор упреждения сброса
Регулятор упреждения сброса, работающий во всех режимах WRCS и WRCS/LABS, работает совместно с AWRU для упреждения сигнала сброса в миллисекундах. В то время как настройка интервалометра AWRU запускает последовательность импульсов сброса с момента нажатия кнопки сброса бомбы, когда регулятор упреждения сброса применяется в режиме доставки WRCS, конкретное местоположение бомбы в последовательности многократного залпа можно рассчитать заранее, что позволяет максимально эффективно распределить бомбы по заданной цели.
Например, выбрано количество бомб для одиночного залпа AWRU 4 с интервалом 120 миллисекунд. Чтобы разместить третью бомбу в залпе на цели, используется следующая формула:

где
RA= настройка упреждения сброса, миллисекундыI_R= настройка интервалометра сброса AWRU, миллисекундыN_Tgt= номер бомбы в последовательности попадания, желаемой на цели
Таким образом, для этого сброса мы установим значение RA равным 240 мс. Это приведёт к разбросу двух бомб перед целью, одной на рассчитанной точке цели и одной позади.
Максимальная настройка регулятора упреждения сброса составляет 999 миллисекунд. Калькулятор для расчёта упреждения сброса в игре предоставляется с калькулятором бомбометания. Вы можете открыть и закрыть его, нажав RCTRL+B в игре.
Регулятор коэффициента сопротивления
Этот ввод, используемый только в режиме Dive Toss, является коэффициентом смещения, подготовленным для баллистического компьютера, чтобы компенсировать фактическую траекторию бомбы. Максимальная настройка для этого значения - 9,99.
Баллистический компьютер
Баллистический компьютер не доступен напрямую экипажу, а вместо этого предварительно настраивается на основе сконфигурированной загрузки наземным экипажем для добавления необходимых коэффициентов смещения сброса. Компьютер использует эти предустановленные коэффициенты смещения в сочетании с настройкой коэффициента сопротивления боеприпасов в режиме Dive Toss для расчёта точной доставки.
Встроенное тестирование (BIT) WRCS
Управление BIT используется для подтверждения состояния GO/NO-GO WRCS. Система BIT проверяет отдельные режимы бомбометания по отдельности, и эффективность заданной настройки подтверждается путём выбора желаемого режима, нажатия центра ручки PUSH FOR BIT на пять секунд, а затем нажатия кнопки FREEZE вместе с кнопкой PUSH FOR BIT. Подтверждение работы режима будет отображаться как GO или NO-GO. Если режим будет проверен ещё раз во время полёта, и будет получен ответ NO-GO, его можно игнорировать.
Панель управления курсором

Панель управления курсором предоставляет органы управления, необходимые для режимов бомбометания TARGET FIND и OFFSET. Панель имеет два колеса с надписями ALONG TRACK и CROSS TRACK, которые используются в режиме MAP-PPI для размещения соответствующих курсоров над точкой радиолокационного опознавания (далее обозначаемой как RIP). Орган управления ALONG TRACK, который отображает относительную дальность до RIP, также включает в себя внутренний переключатель, позволяющий баллистическому компьютеру WRCS распознавать инструкции курсора, и поэтому он должен быть первой применённой командой в последовательности ввода цели.
Как только курсоры ALONG TRACK (полусфера дальности) и CROSS TRACK (вертикальная линия) будут выровнены над RIP, нажимается кнопка FREEZE, чтобы запустить отслеживание траектории по земле WRCS указанной точки. Кнопка остаётся гореть до тех пор, пока не будет нажата кнопка RESET или не будет выбран другой режим бомбометания.
Когда отслеживание траектории по земле WRCS запущено, нажимается кнопка TARGET INSERT, чтобы курсоры ALONG TRACK и CROSS TRACK сместились с RIP на смещённую цель. После выбора информация о наведении на цель передаётся с WRCS на BDHI, ADI, HSI и оптический прицел. В режиме ракеты AGM-45 индикаторы угла атаки будут предоставлять команды маневрирования для выполнения требований по выравниванию для захвата цели головкой самонаведения. Кроме того, если переключатель тона набора высоты не отключён на панели LABS, звуковой тон будет воспроизводиться с момента нажатия кнопки сброса бомбы до тех пор, пока первая бомба не будет сброшена с самолёта; эта функция номинально предназначена для учебных целей, так как она может перекрывать громкость звука других систем.
Панель сброса оружия

Панель сброса оружия позволяет экипажу использовать функции TGT FIND WRCS в режимах LABS (ARBCS) - те, которые находятся на левой стороне ручки режима доставки пилота.
Переключатель TGT FIND на панели работает так же, как режим TGT FIND на ручке режима доставки. Ручка режима доставки переопределяет этот переключатель в любом режиме, кроме TGT FIND, и его следует установить обратно в положение NORM. Положение HOLD включает цепи поиска цели совместно с любым режимом LABS или DIRECT, выбранным пилотом.
Переключатель RANGE работает в любом режиме WRCS, требующем настройки дальности сброса. Положение NORM применяет указанный множитель x10 к отображаемому значению сброса, в то время как выбор x100 применяет множитель 100 к значению счётчика.
Переключатель ACTIVATE запускает предварительные сигналы активации цепей LABS, как только самолёт пройдёт в пределах дальности сброса. Переключатель следует устанавливать в положение ON только после нажатия кнопки Target Insert и перехода курсоров ALONG TRACK и CROSS TRACK на цель.
Автоматизированный вычислитель сброса и привязки к высоте (ARBCS)
AN/AJB-7 ARBCS - это автоматизированная система управления сбросом для бомбометания по времени или тангажу. Взаимодействуя с органами управления многозарядным оружием, настройками оружия на панели пьедестала и бомбами, бомбами с лазерным наведением или AGM-45, система сбрасывает выбранный боеприпас, как только будет достигнут соответствующий угол тангажа (гироскоп) вычислителя угла сброса бомбы или соответствующий таймер бомбометания.
Левая сторона ручки режима доставки выбирает режимы сброса ARBCS. Оба режима LOFT и T LAD обеспечивают сброс оружия при наборе высоты, причём LOFT выбирает график набора высоты 4,0 G и сброс оружия при достижении заданного значения угла гироскопа, в то время как T LAD предполагает график набора высоты 3,5 G и сброс в конце настройки таймера бомбометания. Необходимые значения для малого и большого угла, а также таймера бомбометания приведены в прилагаемых таблицах.
Вычислитель угла сброса бомбы

Вычислитель угла сброса бомбы обеспечивает ввод необходимых углов тангажа цели для режимов бомбометания ARBCS. Значения HIGH (от 70 до 179,9 градусов) и LOW (от 0 до 89,9 градусов) регулируются с помощью соответствующих ручек ввода. Внутри компьютера находятся переключатели сброса, а также резольвер для передачи значений угла цели на указатели ADI.
Калькулятор для входных значений в игре предоставляется с калькулятором бомбометания. Вы можете открыть и закрыть его, нажав RCTRL+B в игре.
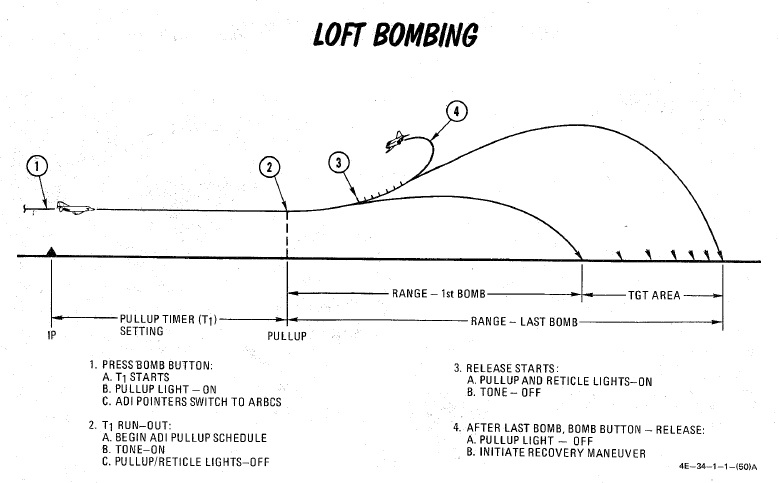
Таймеры бомбометания

Таймеры для режимов бомбометания ARBCS доступны для PULL-UP (от 0 до 60 секунд) и RELEASE (от 0 до 30 секунд). Оба можно установить с шагом 0,1 секунды, при этом минимальная настройка составляет 0,1 секунды. Опорные окна не ведут обратный отсчёт во время бомбометания.
Когда таймер PULL-UP завершает отсчёт, запускается необходимая сигнализация PULL-UP, а также любое программирование указателей ADI для отображения правильной траектории полёта. Время RELEASE зависит от режима и начнётся после завершения PULL-UP, если это необходимо.
В режимах LOFT и O/S активируется только время PULL-UP, и необходимо установить значение, чтобы включить программу траектории полёта ADI для набора высоты.
В режимах T LAD и TL PULL-UP и RELEASE активируются последовательно, и для обоих требуется ввод значения - PULL-UP для включения программирования траектории полёта, а RELEASE для генерации сигнала сброса боеприпасов.
При интегрированном бомбометании LABS (ARBCS)/WRCS вышеуказанные требования остаются прежними; однако WRCS запускает отсчёт времени бомбометания, а не нажатие кнопки сброса бомбы. Когда WRCS запускает отсчёт времени, подаётся звуковой тон, сигнализирующий о начале отсчёта времени.
Калькулятор для входных значений в игре предоставляется с калькулятором бомбометания](../../dcs/bombing_computer.md). Вы можете открыть и закрыть его, нажав RCTRL+B в игре.
Индикаторы ARBCS
Во время сброса оружия ARBCS доступен ряд индикаторов для подтверждения запуска и того, на каком этапе данного запуска находится самолёт:
- При запуске (нажатие кнопки сброса бомбы/запуск WRCS) и запуске таймера PULL-UP индикатор Pull-up загорается.

- По завершении отсчёта таймера PULL-UP индикатор Pull-up гаснет, индикатор сетки гаснет, и раздаётся постоянный тон набора высоты (если он включён).
- При достижении угла тангажа сброса индикатор Pull-up загорается, индикатор сетки загорается, а тон набора высоты прекращается.
- При отпускании кнопки сброса бомбы индикатор Pull-up гаснет.
Эта последовательность индикации может происходить с главным переключателем включения в положении SAFE для учебных целей.
Быстрая установка гироскопа

Из-за быстрого маневрирования во время бомбометания может возникнуть отклонение гироскопа из-за миграции жидкости. Хотя это отклонение со временем устранится естественным образом со скоростью 1-2 градуса коррекции в минуту, его можно быстро скорректировать с помощью переключателя FAST ERECT, расположенного в кабине переднего пилота на левой консоли, со скоростью 15 градусов в минуту. Этот переключатель не следует удерживать более 60 секунд, иначе гироскоп может быть повреждён.
Оптическая система прицеливания (LCOSS)

Оптическая система прицеливания, или сокращённо LCOSS, используется для установления визуальной точки отсчёта для сброса оружия "воздух-воздух" или "воздух-земля". Красная сетка проецируется на комбинированное стекло. LCOSS имеет семь различных режимов, которые можно выбрать с помощью ручки режима прицела.
Органы управления LCOSS
Ручка режима прицела
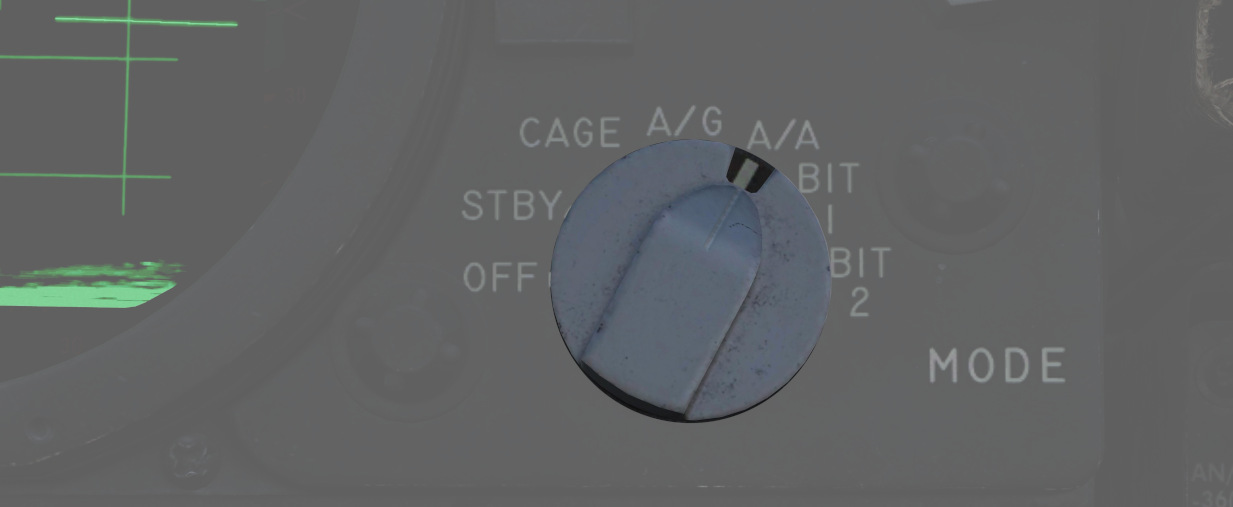
Ручка режима прицела выбирает режимы работы, которые следующие:
| Ручка режима прицела | Функция |
|---|---|
| OFF | Обесточивает систему прицела. |
| STBY | Включает систему прицела для прогрева, но не отображает сетку. |
| CAGE | Сетка отображается и фиксируется на линии визирования радара (RBL). |
| A/G | Выбирает режим "воздух-земля". Сетку можно опустить от нуля мил до 245 мил ниже линии отсчёта фюзеляжа (FRL). |
| A/A | Выбирает режим упреждающего вычисления "воздух-воздух". Положение сетки определяется гироскопом прицела, дальностью радара, датчиком CADC и кнопкой CAGE на РУДе. |
| BIT 1 и BIT 2 | Включает реле усилителя упреждающего вычисления, так что на систему прицела подаются фиксированные напряжения для самотестирования. Отображает изображения самотестирования. |
Регулятор снижения сетки
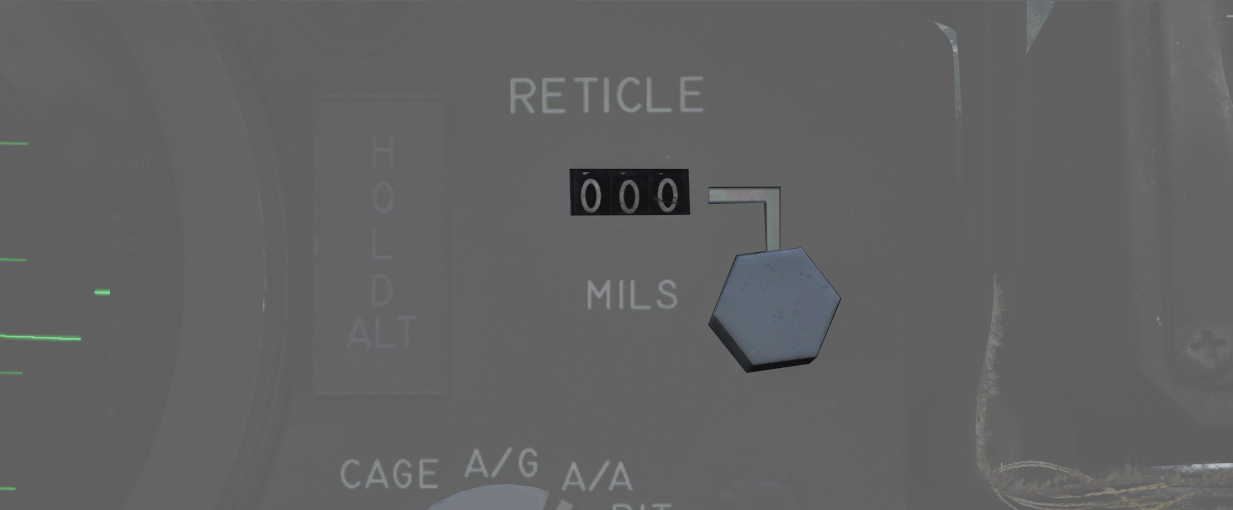
Сетку можно опустить, вращая ручку снижения сетки, пока на индикаторе (с шагом в один мил) не отобразится желаемая настройка прицела. Сетку нельзя позиционировать вручную по азимуту.
Регулятор интенсивности сетки
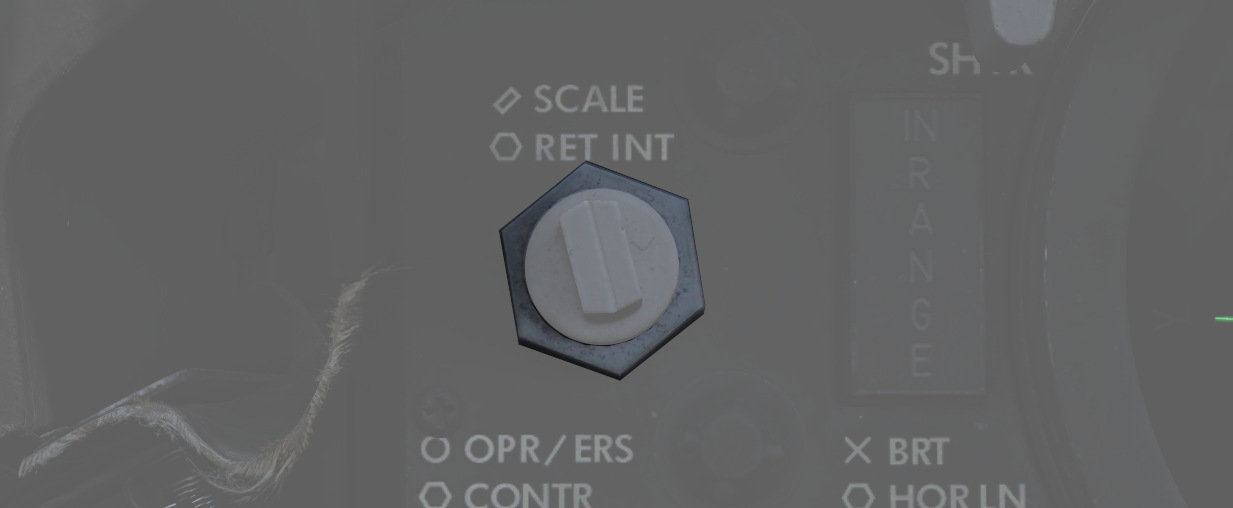
Вращение ручки регулировки интенсивности сетки изменяет яркость сетки.
Рычаг управления затвором

Рычаг управления затвором - это двухпозиционный рычаг с положениями CL (закрыто) и OPEN. В положении CL затвор размещается между источником света оптики и комбинированным стеклом, предотвращая таким образом повреждение оптики от яркого солнечного света. В положении OPEN затвор убран, и сетка будет отображаться.
Изображение сетки
Изображение сетки, которое проецируется на комбинированное стекло, состоит из фиксированной сетки, меток крена и шкалы дальности. Фиксированная сетка состоит из визирной марки диаметром 2 мил, расположенной в центре сегментированного круга диаметром 25 мил, и завершённого круга диаметром 50 мил.
Метки крена вращаются вокруг круга диаметром 50 мил. Метки крена имеют две отдельные функции. В режиме бомбометания со смещением и режиме поиска цели метки крена предоставляют информацию о наведении от WRCS. Положение меток крена относительно фиксированных индексных меток указывает на угол между путевым углом и курсом на цель. Во всех остальных режимах работы метки крена указывают на крен самолёта, предоставляемый INS.
| Крен влево | Крен вправо |
|---|---|
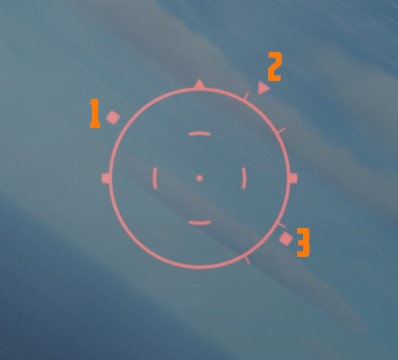 | 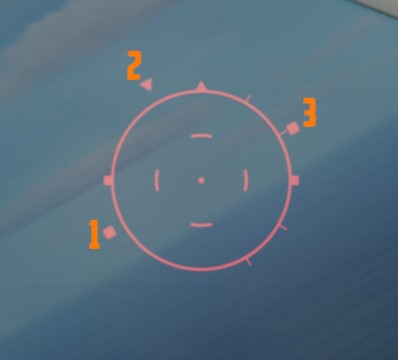 |
| 1 - левая метка крена, 2 - центральная метка крена, 3 - правая метка крена | 1 - левая метка крена, 2 - центральная метка крена, 3 - правая метка крена |
Шкала дальности имеет полукруглую форму и появляется внутри круга диаметром 50 мил только тогда, когда цель захвачена радаром. Мгновенная длина шкалы дальности и скорость, с которой изменяется длина, указывают на фактическую наклонную дальность радара и дальность между самолётом и целью. Минимальная длина шкалы дальности (и минимальная индикация дальности) находится в положении 6 часов. При выбранной пушке внутренняя метка шкалы дальности в положении 6 часов, фактическая дальность радара составляет 1000 футов. В положении 5 часов шкала дальности составляет 2000 футов, продолжаясь с шагом 1000 футов на метку. Максимальная отображаемая дальность составляет 6667 футов при выбранной пушке. Когда выбран любой другой режим, кроме GUN, шкала дальности составляет 3000 футов в положении 6 часов и 6000 футов в положении 5 часов, с шагом 3000 футов на метку. Максимальная отображаемая дальность составляет 20 000 футов.
| Шкала дальности с пушкой | Шкала дальности в любом другом режиме |
|---|---|
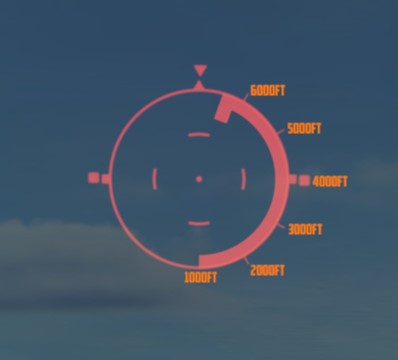 | 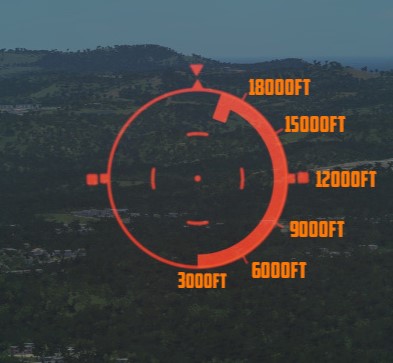 |
Функция фиксации сетки
Функция фиксации сетки включается с помощью кнопки CAGE на РУДе. Когда прицел работает в режиме (GUNS) A/A и нажата кнопка CAGE (нет захвата радаром), сетка фиксируется на линии визирования радара (RBL). Когда кнопка CAGE отпущена, в компьютер подаётся псевдодальность 1000 футов, но шкала дальности не отображается. При захвате радаром функция фиксации применяется, пока нажата кнопка CAGE. Шкала дальности продолжает указывать фактическую дальность радара или максимальную отображаемую дальность. Когда кнопка CAGE отпущена, сетка перемещается по азимуту и углу места, чтобы отобразить упреждение, необходимое до максимума 4000 футов. Это произойдёт только при выбранном GUNS.
Pave Spike

Прицельный контейнер AN/AVQ-23 Pave Spike является преемником AN/AVQ-10 Pave Knife и предшественником контейнера AN/AVQ-26 Pave Tack. Он поступил на вооружение в 1974 году и был заменён с 1982 по 1989 год контейнером Pave Tack. Он обеспечивает управляемое телевизионное изображение для обнаружения наземных целей и может стрелять лазером для определения информации о дальности и наведения оружия с лазерным наведением.

Линией визирования может управлять WSO с помощью ручки управления антенной. Изображение с камеры отображается на индикаторе DSCG и может просматриваться как пилотом, так и WSO независимо друг от друга.
Прицельный контейнер
Система имеет оптическую камеру для работы в дневное время с одним уровнем оптического увеличения, для широкого и узкого (4x) поля зрения.
Ограничения для подвеса контейнера:
- Крен: от -160 до +110 градусов
- Тангаж: от -160 до +15 градусов
- Рыскание: от -15 до +15 градусов
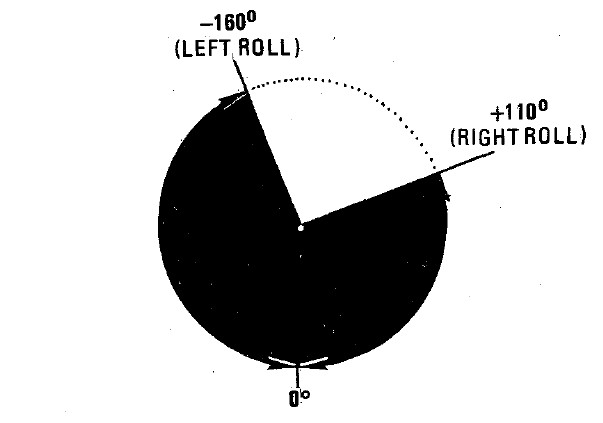
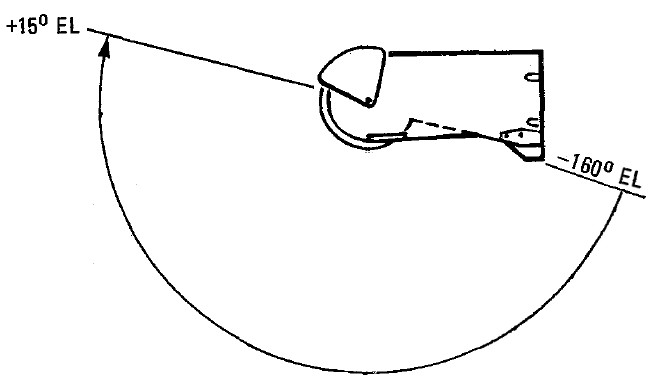
Символика
Телевизионное изображение в основном состоит из сетки. Сетка вращается по часовой стрелке, чтобы указать текущий угол места контейнера. При повороте на 90 градусов контейнер смотрит прямо вниз. Если сетка почти перевёрнута, контейнер достиг предела подвеса по углу места (160 градусов).
Широкое поле зрения обозначается кругом вокруг сетки.
Слева на изображении отображаются два сигнала:
- Время до точки сброса (TTg)
- Сигнал сброса (T0)
Во время работы с оружием TTg перемещается вниз, пока не пересечётся с T0, указывая время до сброса, максимально 15 секунд.
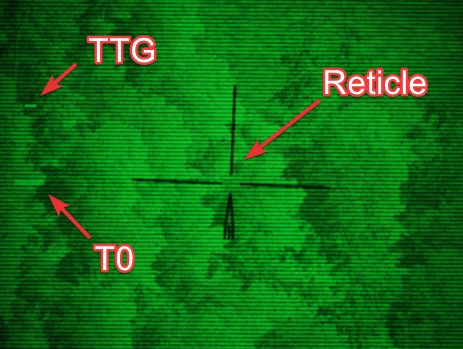

Сигналы также указывают на различные ситуации, связанные с работой лазера.
| Индикация | T0 | TTG |
|---|---|---|
| не отображается | не в режиме TRACK | не в режиме TRACK |
| горит постоянно | cкоманда на стрельбу лазером (полное нажатие) | стрельба лазером, дальность принята |
| мигает быстро | нет команды на стрельбу лазером | нет стрельбы лазером или цель слишком далеко |
| мигает медленно | стрельба лазером, но дальность отклонена |
Органы управления
С Pave Spike в основном взаимодействует WSO, в то время как пилот имеет индикаторы, помогающие ему удерживать линию визирования контейнера в пределах его ограничений.
Вся система, известная как электрооптическая система целеуказания AN/ASQ-153, состоит из:
- Индикатора дальности (пилот)
- Индикатора азимута-угла места (пилот)
- Панели управления кодировщиком лазера (WSO)
- Набора органов управления целеуказателем (WSO)
В то время как изображение отображается на экранах DSCG в обеих кабинах.
 (
(
 (
(
Индикатор азимута-угла места
Индикатор азимута-угла места - это основной прибор для пилота для оценки текущего положения контейнера, чтобы поддерживать линию визирования в пределах эксплуатационных ограничений.

Стрелка показывает положение крена контейнера от -160 (по часовой стрелке) до +110 (против часовой стрелки) градусов.
Три флажка указывают на угол места:
- зелёный: от -120 до -155 градусов
- жёлтый: от -155 до -160 градусов
- красный: -160 градусов или более
💡 Если стрелка находится в пределах диапазона, обозначенного зелёным цветом, и не отображаются ни жёлтый, ни красный флажок, обзор не будет заблокирован контейнером или самолётом.
Индикатор дальности
Эта панель предоставляет пилоту показания наклонной дальности, измеренной Pave Spike (x100 футов).

При нажатии кнопки тестирования (
Ручка режима (
- WRCS - Автоматическая доставка
- ROR - Сброс по дальности
В положении SET на дисплее отображается желаемая дальность сброса, используемая в режиме ROR. Ручку под показаниями (
Панель управления кодировщиком лазера
WSO может установить код лазера, используемый прицельным контейнером, с помощью четырёх маленьких кнопок (

Система кодировщика лазера начинает проверку введённого кода, этот процесс занимает около 5 секунд. Если индикатор NO-GO горит, код недействителен.
💡 Коды напрямую связаны с частотами лазера, в результате чего они должны быть от 1111 до 1788 и не использовать цифры 0 или 9, чтобы быть действительными.
Когда на систему подаётся питание, она автоматически запускает передачу текущего установленного кода.
Набор органов управления целеуказателем
Это основная панель для взаимодействия с прицельным контейнером.

Слева направо, сверху вниз, он предоставляет WSO:
- Ручку яркости сетки (
1 ) - изменение цвета сетки с чёрного на зелёный - Ручки визирования по азимуту/углу места/крену (
2 ,3 ,4 ) - регулировка положения визирования контейнера в пределах ±2,5 градуса - Кнопку Stow (
5 ) - включение или выключение лазера - Кнопку Laser Ready (
6 ) - включение или выключение контейнера - Кнопку Power On (
7 ) - включение или выключение контейнера - Текущий выбранный BIT, с кнопкой для переключения BIT (
8 ) - Ручку яркости индикаторов (
9 ) - регулировка яркости всех индикаторов на этой панели (кроме индикатора перегрева) - Кнопку Reject/Override (
10 ) - принудительное использование наклонной дальности лазера - Переключатель режима захвата (
11 ) - выбор режима захвата (12-VIS, WRCS или 9-VIS) - Кнопку WRCS Out (
12 ) - включение/выключение интеграции WRCS с контейнером - Индикатор GO/MALF (
13 ) - отображение результатов BIT - Кнопку INS Out (и индикатор перегрева) (
14 ) - включение/выключение интеграции INS с контейнером
Индикаторы обычно показывают текущее состояние, в то время как кнопки можно использовать для ручной команды. Например, нажатия кнопки Laser Ready недостаточно для того, чтобы лазер был готов к работе. Индикатор загорится только в том случае, если выполнены все остальные условия, такие как установка действительного кода лазера.
Ручка управления антенной
В режиме Track WSO может вручную поворачивать и корректировать линию визирования контейнера с помощью ручки управления антенной или ручки антенны.

Кнопка Challenge (
💡 Органы управления не инвертированы. Перемещение ручки вверх также перемещает вид вверх (тангаж вверх).
💡 Математика контейнера довольно ограничена, не перемещайте сетку выше линии отсчёта самолёта (взгляд вверх), иначе органы управления инвертируются, и контейнер не сможет правильно рассчитать координаты цели.
Спусковой крючок работает немного по-другому, если он используется для Pave Spike, по сравнению с радаром или некоторыми другими самолётами. Чтобы выстрелить лазером, вместо того, чтобы, возможно, удерживать спусковой крючок нажатым, необходимо выполнить последовательность и переместить спусковой крючок через все его положения вперёд и назад, то есть из положения Released в Half Action, в Full Action, обратно в Half Action и Released. Выполнение этой последовательности включит или выключит лазер. Чтобы войти в режим Track, необходимо выполнить последовательность Released - Half Action и обратно в Released. Удержание спускового крючка в любом положении не приведёт к срабатыванию связанного действия.
💡 Наши предустановленные привязки гарантируют правильное выполнение последовательности. Для физических двухпозиционных спусковых крючков используйте соответствующие двухпозиционные привязки.
Электрика
Pave Spike получает питание через 4 автоматических выключателя на панели автоматических выключателей № 4 (WSO, левая стенка). Они передают ток с левой основной шины переменного тока и основной шины постоянного тока.

Все панели системы питаются непосредственно через контейнер и, следовательно, будут отключены, если прицельный контейнер Pave Spike не установлен.
💡 Необязательно включать сам контейнер, чтобы питание подавалось через контейнер на панели.
Интеграции
Интеграция INS
При нормальной эксплуатации контейнер подключён к INS. Это можно отключить вручную, нажав кнопку INS OUT.

При отключённом INS следующие функции недоступны:
- Автоматическая стабилизация цели в режиме Track
- Стабилизация по крену в режиме захвата 12-VIS
- Расчёт наклонной дальности
- Интеграция WRCS
Интеграция WRCS
При нормальной эксплуатации контейнер подключён к WRCS. Это можно отключить вручную, нажав кнопку WRCS OUT.

Кроме того, WRCS отключается автоматически без интеграции INS или если в данный момент не выбран режим оружия DIRECT или TGT FIND.

При отключённом WRCS следующие функции недоступны:
- Режим захвата WRCS
- Режим памяти
- Автоматический сброс оружия WRCS
И некоторые функции ухудшены, но всё ещё доступны:
- Расчёт наклонной дальности
- Автоматическая стабилизация цели в режиме Track
Режимы
Прежде чем можно будет обозначить цель, необходимо визуально захватить общую область цели и направить линию визирования в её окрестности. Это делается с помощью одного из трёх режимов захвата:
- 12-VIS
- 9-VIS
- WRCS
WSO может выбрать режимы с помощью переключателя режима захвата.

Визуальные режимы
В режимах 12-VIS и 9-VIS линия визирования устанавливается в фиксированное положение.
- 12-VIS: крен 0 градусов, угол места -2 градуса, взгляд немного вниз
- 9-VIS: крен -90 градусов (по часовой стрелке), угол места -90 градусов (вниз), взгляд влево
12-VIS может быть отличным способом найти цели вне плана, так как он позволяет пилоту направить нос прямо на цель. Положение также соответствует зафиксированной сетке HUD. Кроме того, если INS интегрирован с контейнером, 12-VIS стабилизируется по крену.
Использование 9-VIS очень ограничено. Он предназначен для помощи в захвате цели при наблюдении за областью во время поворота. Цель должна быть размещена на продолжении левого крыла. Однако на практике очень сложно поддерживать поворот в таком положении.
Режим WRCS
Основным режимом захвата целей является режим WRCS, в котором линия визирования устанавливается на текущую цель WRCS. Обычно это соответствует курсору на экране радара, но также может быть установлено вручную WSO. Это позволяет экипажу обнаружить цель или общую область цели с помощью радара или ввода известных координат, а затем направить контейнер на этот пункт назначения. Если конкретная цель не введена, WRCS обычно по умолчанию устанавливается на положение самолёта, в результате чего контейнер смотрит прямо вниз.
💡 Режим WRCS автоматически переходит в режим 12-VIS в случае отключения интеграции WRCS.
Режим Track
Как только цель или общая область цели будет найдена с помощью режимов захвата, WSO может войти в режим Track, нажав спусковой крючок на ручке управления антенной до полунажатия или полного нажатия.
💡 Необходимо, чтобы спусковой крючок прошёл через полную последовательность, например, Released - Half Action и обратно в Half Action, чтобы войти в режим Track.
В этом режиме ручку антенны можно перемещать, чтобы поворачивать линию визирования контейнера. Управление лазером доступно только в этом режиме и может быть активировано путём нажатия спускового крючка на ручке антенны до полного нажатия.
Режим Track обозначается тем, что сигналы T0 и TTG становятся видимыми на дисплее. Они также указывают на состояние во время работы лазера.
Если INS интегрирован с контейнером, изображение будет автоматически стабилизировано в пространстве по рассчитанному положению цели. Имейте в виду, что стабилизация рудиментарна и требует постоянной коррекции с помощью ручки, чтобы цель оставалась в центре.
Стабилизация в основном основана на измеренной наклонной дальности. Точную наклонную дальность можно получить, выстрелив лазером. В качестве альтернативы она рассчитывается на основе барометрической высоты самолёта и высоты цели, которую WSO может установить на панели WRCS.
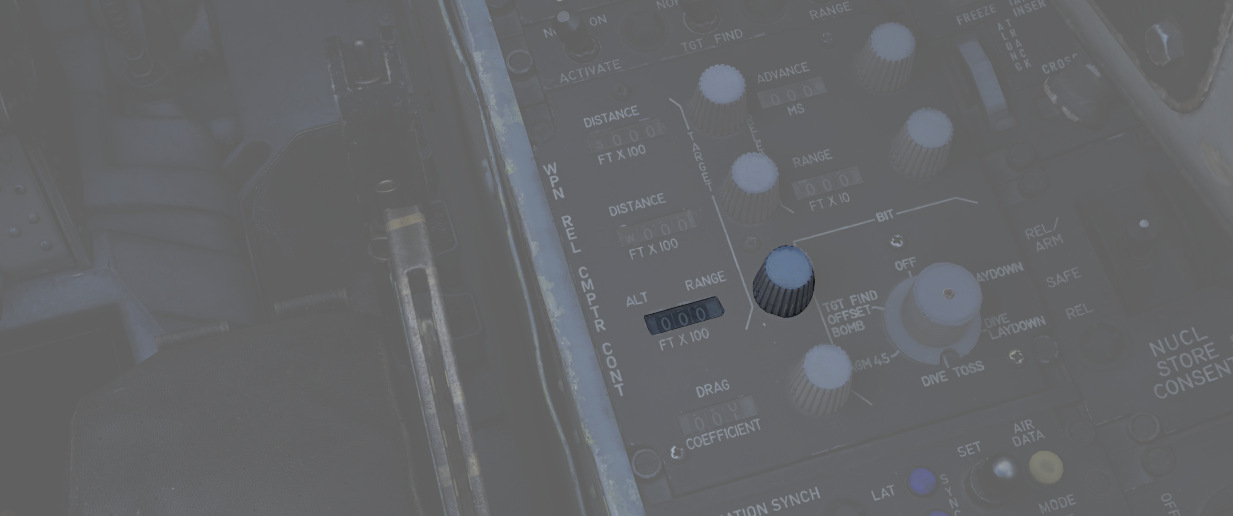
Без интеграции WRCS предполагается высота цели 0, что ухудшает стабилизацию.
💡 Контейнер не способен рассчитать наклонную дальность для целей, находящихся выше высоты собственного самолёта (например, при атаке в гору). Так как это измеряется с помощью барометрической высоты, в зависимости от настройки давления, это может привести к нестабильному поведению в жаркие дни при полёте на малой высоте. Проблемные ситуации, подобные этой, обычно назывались режимом Idiot, так как система отслеживания начинала вести себя очень странно, и было очень трудно восстановить её правильную работу. Экипажу часто приходилось временно отключать интеграцию INS, чтобы отключить автоматическое отслеживание.
Режим памяти
Каждый раз, когда отправляется сигнал Target Insert, система активирует режим памяти, при условии, что она в данный момент находится в режиме Track, а интеграция WRCS активна.
В этом режиме линия визирования привязана к текущей цели WRCS, даже если она находится за пределами ограничений подвеса контейнера и в данный момент не может быть отображена. Режим работает очень похоже на режим захвата WRCS.
Из режима памяти необходимо выйти явно, нажав полунажатие или полное нажатие на ручке антенны.
Target Insert
Сигнал Target Insert обычно инициируется WSO нажатием кнопки Target Insert.
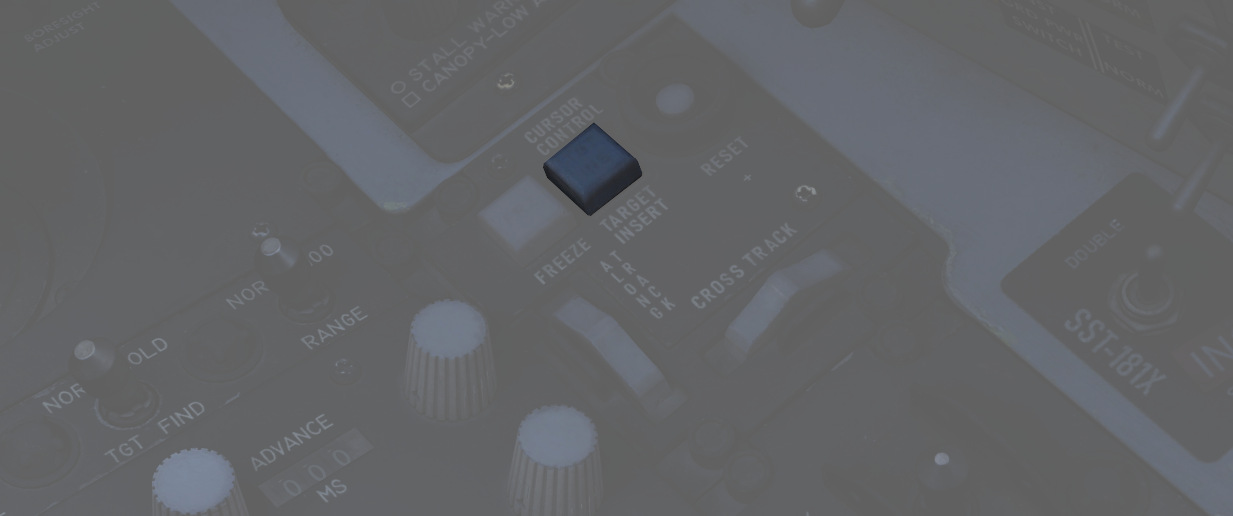
Однако, когда контейнер в данный момент находится в режиме Track и перемещается за пределы ограничений своего подвеса, он автоматически инициирует сигнал Target Insert и отправляет своё текущее положение цели на WRCS.
💡 Если лазер в данный момент стреляет, он автоматически остановится при достижении предела.
Этот сигнал также приводит к тому, что контейнер переходит в режим памяти, и в этом случае он будет продолжать следовать за положением, теперь запомненным WRCS.
Кроме того, сигнал также будет отправлен, если контейнер будет отменён, то есть:
- Кнопка выбора видеосигнала - Weapon, или
- Режим DSCG WSO - не TV (например, переключение на Radar)
Лазерная система
Лазер можно использовать только в режиме Track, и он служит двум целям:
- Наведение оружия с лазерным наведением на цель,
- и точное измерение наклонной дальности.
Наклонная дальность, помимо расчётов попадания оружия, используется для автоматической стабилизации цели в режиме Track. Если она не измеряется лазером, она рассчитывается на основе неточных данных INS и WRCS, что приводит к ухудшению работы системы.
Лазер можно использовать, когда горит индикатор LASER READY.

Чтобы настроить лазер, сначала необходимо ввести действительный код на панели управления кодировщиком лазера и передать его на контейнер, нажав кнопку Enter. Убедитесь, что индикатор NO GO не горит.
Кнопку LASER READY необходимо нажать, чтобы включить лазер.
Кроме того, лазер защищён положением носовой стойки шасси, которая должна быть полностью убрана, чтобы предотвратить случайное использование на земле.
После подготовки лазер запускается в режиме Track путём нажатия полного нажатия на ручке антенны. Состояние работы лазера указывается сигналами на дисплее, которые горят постоянно или мигают.
💡 Необходимо, чтобы спусковой крючок прошёл через полную последовательность Released - Half Action - Full Action - Half Action - Released, чтобы активировать лазер. В частности, не удерживайте спусковой крючок нажатым, а отпустите его.
| Индикация | T0 | TTG |
|---|---|---|
| не отображается | не в режиме TRACK | не в режиме TRACK |
| горит постоянно | команда на стрельбу лазером (полное нажатие) | стрельба лазером, дальность принята |
| мигает быстро | нет команды на стрельбу лазером | нет стрельбы лазером или цель слишком далеко |
| мигает медленно | стрельба лазером, но дальность отклонена |
Сигнал T0 указывает на намерение выстрелить лазером, а сигнал TTG - на результат использования лазера.
Наклонная дальность, измеренная лазером, сравнивается с наклонной дальностью, рассчитанной на основе данных INS и WRCS. Если она не находится в пределах ±20% от этого значения, она отклоняется. Это обозначается медленным миганием TTG.
Систему можно заставить использовать дальность лазера независимо от этого, нажав кнопку Reject/Override.

На практике дальность, измеренная лазером, намного точнее, чем наклонная дальность, рассчитанная системой. Следовательно, у пилотов выработалась привычка всегда нажимать эту кнопку, когда они стреляли лазером.
💡 Эта привычка может привести к проблемам при атаках под малыми углами, например, при полёте на малой высоте, где небольшой ввод может быстро привести к тому, что наклонная дальность, измеренная лазером, будет сильно отличаться. И, следовательно, привести к быстрому смещению стабилизации.
Режимы сброса оружия
Контейнер предлагает два дополнительных режима сброса оружия:
- Автоматический режим WRCS
- ROR (сброс по дальности)
Автоматический режим
Основным методом сброса оружия с помощью контейнера является автоматический режим сброса WRCS.
WRCS должен быть интегрирован с контейнером, чтобы он был доступен, и пилот должен выбрать TGT FIND в качестве режима доставки, а также WRCS на индикаторе дальности.
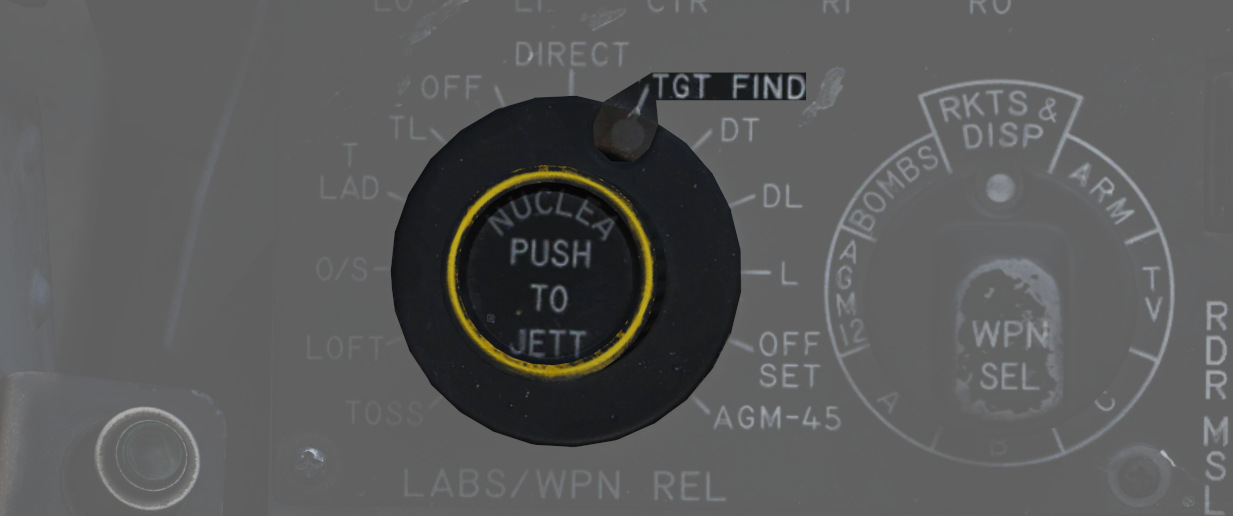

Этот режим работает так же, как режим Dive Toss WRCS, только он будет использовать рассчитанную контейнером наклонную дальность и цель.
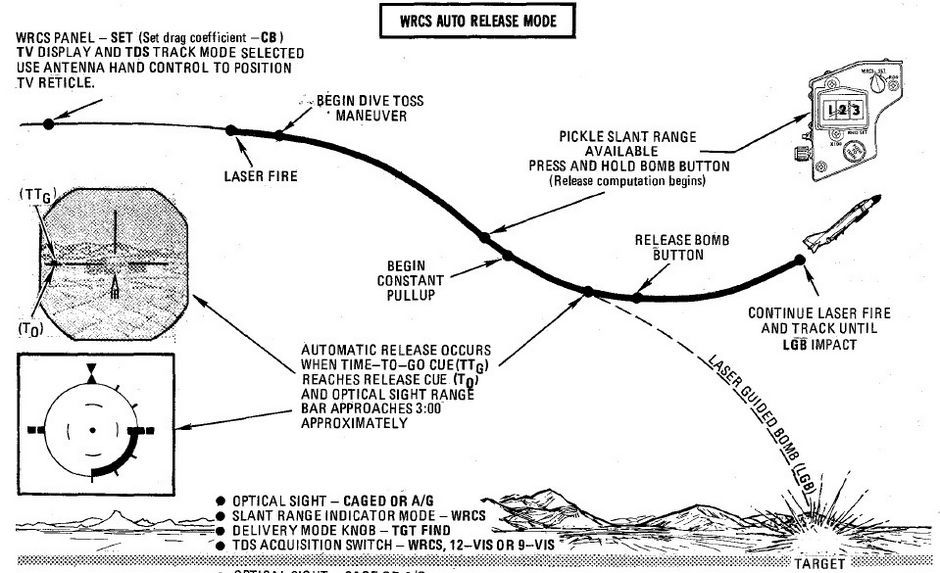
Сигнал TTG будет двигаться вниз и встретится с сигналом T0, чтобы указать время до сброса, максимально 15 секунд.

ROR
Сброс по дальности - это в основном резервный режим. Пилот должен выбрать TGT FIND в качестве режима доставки и ROR на индикаторе дальности.
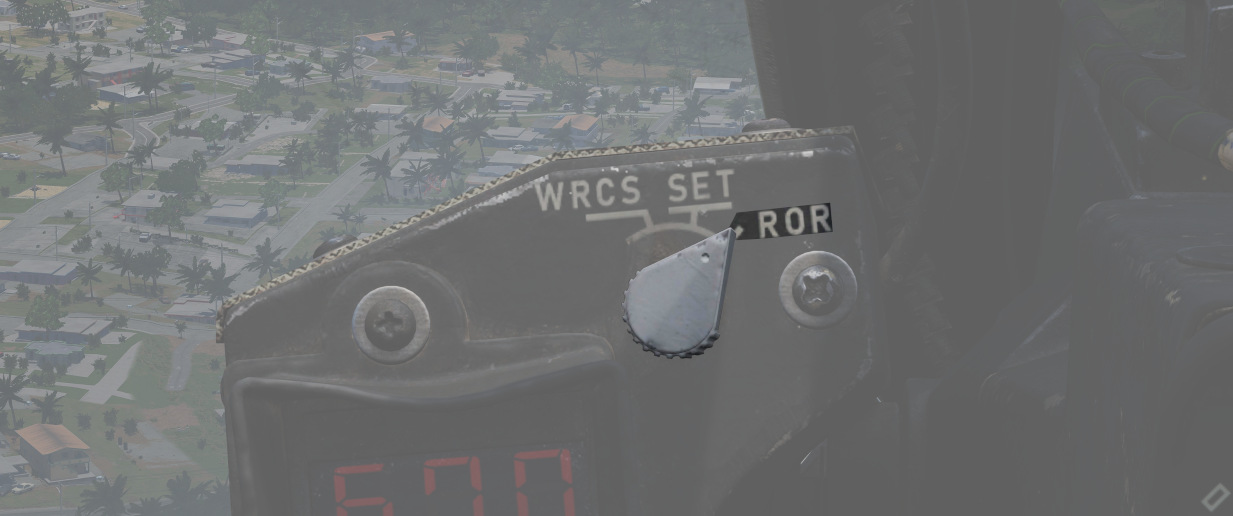
Оружие будет сброшено автоматически, как только рассчитанная наклонная дальность станет меньше установленной желаемой дальности сброса. Дальность настраивается на индикаторе дальности путём установки режима в SET и вращения ручки под дисплеем.

Наилучшие результаты достигаются при горизонтальном полёте.
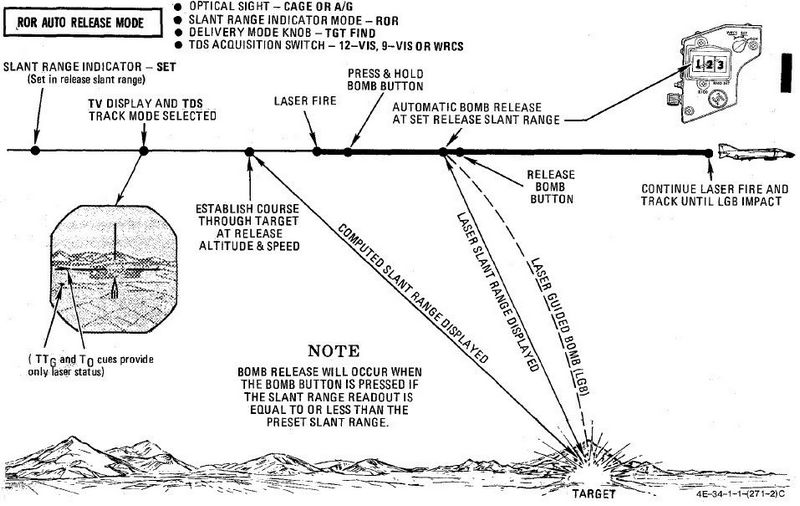
Прочее
Уборка
После включения системы контейнер можно выпустить, нажав кнопку STOW.

Когда контейнер выпущен, он перемещается в соответствии с текущими настройками и автоматически переходит в WIDE FOV.
В убранном положении камера повёрнута вверх, и перед ней установлен чехол. Это защищает камеру от камней и других опасностей во время руления, взлёта или полёта на малой высоте.

Процедура уборки занимает около 5 секунд, при этом индикатор показывает текущее состояние.
🟡 ВНИМАНИЕ: Убранное положение удерживается только электрически и не может удерживаться без питания. Без питания контейнер свободно качается под действием силы. Взлёт без предварительного включения питания контейнера или полёт с выключенным контейнером приведут к тому, что контейнер покинет убранное положение. Вне убранного положения система будет повреждена из-за опасностей и всякий раз, когда она будет принудительно перемещена в пределы своего подвеса. Повреждение не только сместит положение визирования, но и повлияет на другие характеристики, такие как скорость движения и т.п.
Охлаждение
Прицельный контейнер имеет систему охлаждения, установленную в задней части, которая автоматически охлаждает контейнер внешним потоком воздуха.
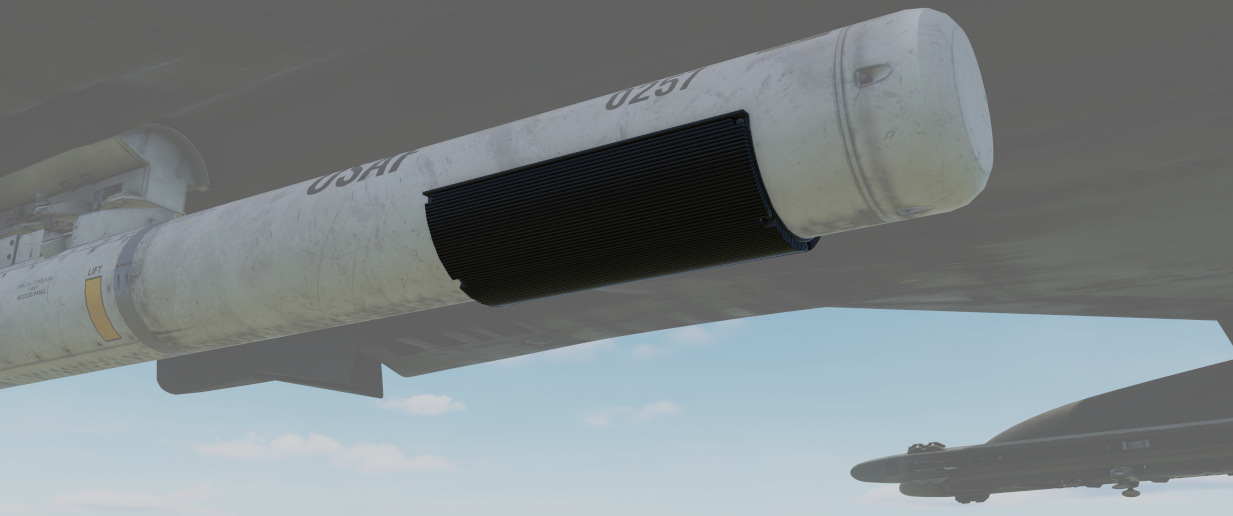
В целом, система способна поддерживать температуру контейнера в пределах нормы во время всей нормальной работы.
Однако, если температура выходит из-под контроля, загорится индикатор перегрева.
В этом случае обязательно немедленно выключите контейнер и дайте ему остыть. Игнорирование индикатора приведёт к расплавлению частей контейнера, что нанесёт ему непоправимый ущерб.
Сломанный контейнер обычно обозначается включением индикатора MALF и полностью чёрным дисплеем.

Чтобы продлить срок службы контейнера и предотвратить перегрев, ограничьте медленный полёт на малой высоте, а также непрерывное использование лазера.
🟡 ВНИМАНИЕ: В качестве эмпирического правила не используйте лазер дольше 15 минут без охлаждения между использованиями. Ограничьте непрерывный медленный полёт на малой высоте при работе с контейнером до 30 минут. Для экстремальных температур наружного воздуха отрегулируйте ограничения соответствующим образом.
Визирование
Обычно Pave Spike правильно калибруется наземным экипажем перед посадкой в самолёт, но он может смещаться из-за боевых повреждений или манёвров с большой перегрузкой, и в этом случае может потребоваться повторная калибровка WSO в полёте.
Поэтому панель управления целеуказателем имеет три ручки для регулировки положения визирования по всем трём осям (азимут, угол места и крен) в пределах 2,5 градусов в любом направлении.

В идеальных условиях контейнер визируется параллельно линии отсчёта самолёта. Однако из-за отсутствия точки отсчёта для калибровки WSO может выполнить только грубое выравнивание.
В качестве первого шага оптический прицел следует перевести в режим A/G, а сетку необходимо опустить примерно на 30 мил. При этой настройке правильное положение визирования пересекается с сеткой прицела на расстоянии примерно от 20 000 до 60 000 футов (от 200 до 600 на индикаторе дальности).
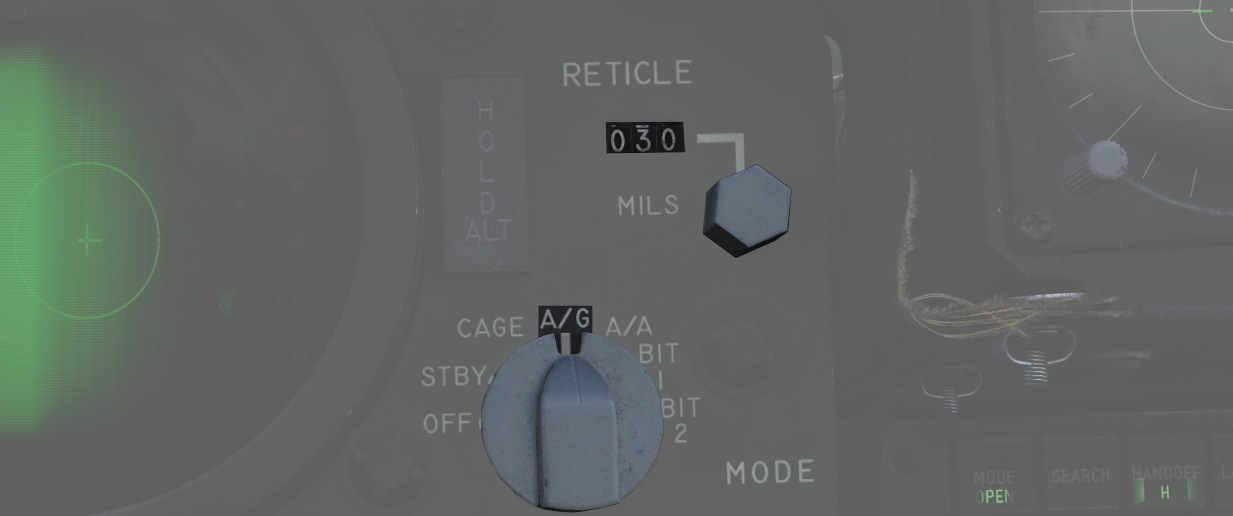 Затем самолёт необходимо маневрировать, чтобы разместить и удерживать удалённый объект, такой как здание, на визирной марке оптического прицела.
Затем самолёт необходимо маневрировать, чтобы разместить и удерживать удалённый объект, такой как здание, на визирной марке оптического прицела.

Пока пилот удерживает объект на визирной марке, WSO должен перевести контейнер в режим захвата 12-VIS, активировать узкое поле зрения и может отрегулировать азимут и угол места, чтобы выровнять контейнер с объектом.
💡 Поскольку контейнер установлен на левой станции, правильное положение визирования смещено на несколько футов влево от визирной марки.

Крен очень сложно выровнять в полёте; по возможности сначала приземлитесь. Затем установите переключатель захвата в положение 9-VIS и используйте ручку Roll, чтобы примерно выровнять контейнер по высоте человека, стоящего на расстоянии.

В качестве альтернативы грубое выравнивание по крену можно выполнить в полёте, установив переключатель захвата в положение WRCS, интегрировав WRCS с контейнером и стерев любой текущий ввод цели. Таким образом, контейнер будет автоматически смотреть прямо вниз.
Теперь самолёт можно пролететь прямо над ориентиром, таким как река, и ручку Roll можно использовать для выравнивания линии визирования с ориентиром.

Встроенные тесты (BIT)
Контейнер имеет 5 встроенных тестов, причём BIT 1 является фактическим режимом, используемым во время нормальной работы. Их можно активировать и переключать, нажимая кнопку BIT под дисплеем. Индикаторы GO/MALF показывают результат BIT:
- GO - тест пройден успешно
- MALF - тест обнаружил ошибку
Во время нормальной работы, активируемой через BIT 1, ни один из индикаторов не горит.
BIT 0
Все индикаторы на наборе органов управления целеуказателем загораются с полной яркостью. Для этого теста не требуется включать контейнер.

GO/MALF не отображают результаты теста в этом режиме.
BIT 1
Цепи включены и контролируются. Если какое-либо показание напряжения ненормальное, загорается MALF.
GO не загорается в этом режиме.
Это стандартный режим работы. Контейнер можно использовать в обычном режиме, и система будет постоянно контролировать его состояние.
BIT 2
Система имитирует функцию отслеживания, имитируя все входные данные, данные о высоте и дальности.
Примерно через 15 секунд тест завершается, и загорается GO или MALF.
💡 Для успешного прохождения теста самолёт не должен двигаться, контейнер должен быть выпущен, а INS должен быть интегрирован.
Bit 3
Этот тест проверяет уровень энергии лазера. Контейнер перемещается в специальное положение, где он смотрит внутрь себя, так что лазер стреляет в специальный датчик, установленный внутри контейнера.
Контейнер должен быть выпущен, должен быть введён действительный код лазера, а также должна быть нажата кнопка LASER READY. Защита носовой стойки шасси игнорируется во время теста, что позволяет использовать лазер на земле.
Как только контейнер достигнет тестового положения, WSO должен нажать и удерживать кнопку Reject/Override, чтобы начать стрельбу лазером. Лазер прекращает стрельбу при отпускании кнопки.
Когда лазер стреляет, запускается 5-секундная тестовая программа, при этом датчик измеряет энергию лазера. После 5-секундного теста загорается GO или MALF, чтобы указать, был ли уровень энергии выше требуемого минимума.

Пилот может помочь WSO определить, что тестовое положение достигнуто, как показано на индикаторе азимута-угла места (1 и 2).
Bit 4
Система проверяет расчёт дальности, подавая имитируемую наклонную дальность лазера 2100 футов (±200). Пилот может подтвердить это с помощью показаний индикатора дальности.
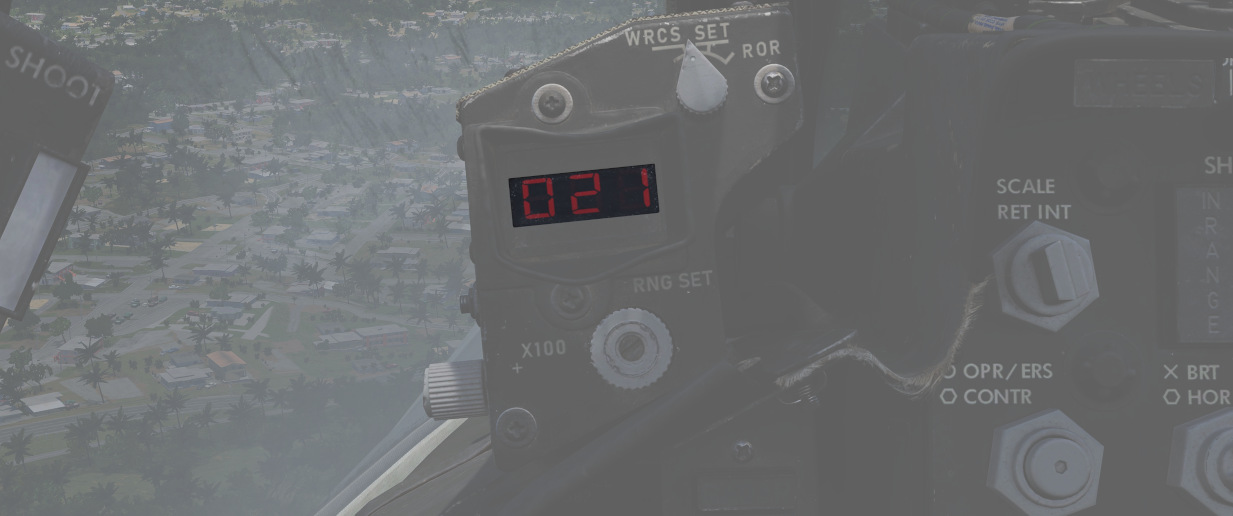
Примерно через 8-14 секунд тест завершается, и загорается GO или MALF.
Модернизации
На основе отзывов экипажей прицельный контейнер Pave Spike получил две основные модернизации, которые доступны в DCS как отдельное выбираемое оружие.
Smart-Track
TCTO 518, известная как модернизация Smart-Track, направлена на устранение необходимости нажимать кнопку Reject/Override, чтобы принудительно использовать наклонную дальность, измеренную лазером, в ситуациях, когда рассчитанная наклонная дальность обычно была слишком неточной.
С модернизацией система будет автоматически принимать наклонную дальность лазера всякий раз, когда подвес угла места контейнера находится выше -7,5 градусов. То есть под малыми углами, например, в режиме 12-VIS или при атаках на малой высоте.
Fast-Track
Популярная модернизация TCTO 519 модернизирует двигатели подвеса контейнера, увеличивая скорость движения с 15 градусов в секунду до 60 градусов в секунду.
💡 На этой скорости прицельный контейнер способен отслеживать цель во время полёта на малой высоте с высокой скоростью, например, при пролёте на высоте 1000 футов со скоростью 500 узлов.
Защитные системы
F-4E оснащён 4 контейнерами сброса средств противодействия AN/ALE-40.Контейнеры сброса средств противодействия AN/ALE-40 используются на различных американских самолётах.
Также на F-4E установлен приёмник радиолокационного предупреждения ALR-46 (далее RWR) - это пассивная система ситуационной осведомлённости F-4E для обнаружения воздушных и наземных радиолокационных угроз.
Для расширенной защиты и постановки радиолокационных помех он также может нести контейнер ECM ALQ-131 ECM Pod.
 Пилот F-4E Phantom II виден в кабине своего самолёта, когда он готовится к выполнению задания во время учений TEAM SPIRIT'86
Пилот F-4E Phantom II виден в кабине своего самолёта, когда он готовится к выполнению задания во время учений TEAM SPIRIT'86
Средства противодействия
Система средств противодействия AN/ALE-40

Набор контейнеров средств противодействия AN/ALE-40 обеспечивает возможность сброса патронов с дипольными отражателями RR-170 A/AL и патронов с инфракрасными тепловыми ловушками MJU-7/B. Система состоит из четырёх слотов для контейнеров, расположенных на внутренних пилонах вооружения (по 2 на каждом), а также органов управления в кабине.
Кабина пилота содержит программатор, переключатель выбора тепловых ловушек с двумя лампами и кнопку сброса, расположенную на РУДе. В кабине WSO есть блок управления кабиной (CCU).
Основной автоматический выключатель AN/ALE-40 расположен на панели автоматических выключателей № 4 над левой задней консолью в кабине WSO.

| Конфигурация контейнера | Описание |
|---|---|
| Без полезной нагрузки | Контейнеры установлены без полезной нагрузки |
| 120 дипольных отражателей | Загружены только дипольные отражатели |
| 60 дипольных отражателей + 30 тепловых ловушек | Загружены 60 дипольных отражателей и 30 тепловых ловушек |
| 90 дипольных отражателей + 15 тепловых ловушек | Загружены 90 дипольных отражателей и 15 тепловых ловушек |
| 30 тепловых ловушек | Загружены только тепловые ловушки |
Общая работа
Управление AN/ALE-40 осуществляется как из передней, так и из задней кабины. CCU запускает различные режимы работы. Программатор будет генерировать команды запуска в различных комбинациях.
Контейнеры, установленные на пилонах, преобразуют команды запуска в индивидуально упорядоченные сигналы запуска. Если режим работы установлен на дипольные отражатели, сброс начнётся с контейнера на левом пилоне, а затем сигналы сброса будут переданы на контейнер на правом пилоне после того, как боеприпасы в левом контейнере будут израсходованы. Если режим работы установлен на тепловые ловушки, сброс начнётся с основного контейнера на правом пилоне, и после того, как боеприпасы будут израсходованы, переключатель секвенсора передаст сигнал сброса на левый основной контейнер. Тепловые ловушки также можно сбросить из своих контейнеров со скоростью 10 тепловых ловушек в секунду, активировав переключатель Ripple, расположенный на CCU.
Сброс средств противодействия может быть инициирован либо пилотом (кнопка на РУДе), либо WSO (кнопка сброса или переключатель Ripple на CCU).
Средства противодействия будут сброшены в соответствии с настройками переключателя выбора тепловых ловушек, CCU и программатора.
Есть два важных определения, которые нужно знать при настройке средств противодействия:
- BURST - одиночный сигнал сброса
- SALVO - группа импульсов
💡 Для сброса средств противодействия закрылки и воздушные тормоза должны быть убраны.
Блок управления кабиной (CCU) - кабина WSO

Блок управления кабиной (CCU) установлен на левой консоли задней кабины. Он состоит из двух ручек режима, двух счётчиков и двух индикаторов (один для дипольных отражателей и один для тепловых ловушек), а также защищённого переключателя Ripple и кнопки сброса.
CCU выдаёт сигналы, которые отправляются на программатор или непосредственно на контейнеры, в зависимости от выбранных режимов.
Ручка режима дипольных отражателей
Когда переключатель выбора дипольных отражателей (
- OFF - нет сброса, так как система дипольных отражателей неактивна.
- SGL - сбрасывается один дипольный отражатель.
- MULT - дипольные отражатели сбрасываются в соответствии с настройками CHAFF BURST программатора.
- PROG - дипольные отражатели сбрасываются в соответствии с настройками CHAFF BURST и CHAFF SALVO программатора.
💡 Когда в редакторе миссий, выбран режим Chaff Double, будет сброшено вдвое больше дипольных отражателей в каждом режиме (2 дипольных отражателя на каждый одиночный сигнал сброса дипольных отражателей). Затем счётчик устанавливается на половину от общего количества загруженных патронов с дипольными отражателями, чтобы указать количество оставшихся сбросов, то есть не патронов.
Ручка режима тепловых ловушек
Когда переключатель выбора тепловых ловушек (
- OFF - нет сброса, так как система тепловых ловушек неактивна.
- SGL - сбрасывается одна тепловая ловушка.
- PROG - тепловые ловушки сбрасываются в соответствии с настройками FLARE BURST программатора.
Счётчики дипольных отражателей и тепловых ловушек
Есть два вычитающих счётчика (3 и 6), один для системы дипольных отражателей и один для системы тепловых ловушек. Они указывают количество оставшихся патронов с дипольными отражателями и тепловыми ловушками.
Индикаторы дипольных отражателей и тепловых ловушек
Как система тепловых ловушек, так и система дипольных отражателей имеют по одному зелёному индикатору (5 и 8). Всякий раз, когда на соответствующей ручке режима выбран режим (кроме OFF), загорается соответствующий индикатор.
💡 Дипольные отражатели и тепловые ловушки можно использовать одновременно, при условии, что используется смешанная загрузка дипольных отражателей и тепловых ловушек.
Переключатель Ripple
Переключатель Ripple (
Кнопка сброса
Кнопка сброса (
Программатор - кабина пилота

Программатор AN/ALE-40 содержит органы управления и схемы, используемые для отправки определённых команд запуска на контейнеры дипольных отражателей и тепловых ловушек. Можно настроить следующие параметры:
| Категория | Ручка | Значения | Описание |
|---|---|---|---|
| CHAFF BURST | COUNT ( | 1, 2, 3, 4, 6, 8 | количество импульсов (на залп) |
| INTERVAL ( | 0.1, 0.2, 0.3, 0.4 | временной интервал между каждым импульсом | |
| CHAFF SALVO | COUNT ( | 1, 2, 4, 8, C (continuous) | количество залпов |
| INTERVAL ( | 1, 2, 3, 4, 5, 8, R (random) | временной интервал между каждым залпом | |
| FLARE BURST | COUNT ( | 1, 2, 4, 8, C (continuous) | количество импульсов |
| INTERVAL ( | 3, 4, 6, 8, 10 | временной интервал между каждым импульсом |
💡 Все интервалы выражены в секундах.
Панель управления топливной системой - кабина пилота

Переключатель выбора тепловых ловушек
Если переключатель выбора тепловых ловушек (
Если переключатель выбора тепловых ловушек находится в положении FLARES, он влияет только на кнопку сброса передней кабины, игнорируя все переключатели и ручки в системе средств противодействия, при условии, что закрылки и воздушные тормоза убраны. Это позволяет пилоту сбрасывать одну тепловую ловушку при каждом нажатии кнопки сброса. Функции сброса в задней кабине не зависят от положения переключателя.
Индикатор включения AN/ALE-40 (зелёный)
Этот зелёный индикатор загорается (
Индикатор тепловых ловушек (жёлтый)
Этот жёлтый индикатор (
Когда он горит, тепловые ловушки можно сбрасывать, нажимая кнопку сброса передней кабины, независимо от настроек программатора и CCU.
Кнопка сброса (кабина пилота)

При нажатии кнопки сброса запускается сброс дипольных отражателей/тепловых ловушек, установленных на CCU и программаторе AN/ALE-40, если закрылки и воздушные тормоза убраны, а переключатель выбора тепловых ловушек установлен в положение NORMAL. Кроме того, сброс одиночной тепловой ловушки можно инициировать одним нажатием кнопки, если переключатель выбора тепловых ловушек установлен в положение FLARES.
Контейнеры AN/ALE-40
Контейнеры средств противодействия AN/ALE-40 делятся на две различные конфигурации контейнеров. Основной (внешний) контейнер содержит электронику и переключатель секвенсора для обоих контейнеров на каждом пилоне и устанавливается на внешней стороне внутренних пилонов вооружения. Ведомый (внутренний) контейнер устанавливается на внутренней стороне внутренних пилонов вооружения и соединён с основным контейнером соединительным кабелем. Самолёт может быть сконфигурирован либо с четырьмя модулями полезной нагрузки с дипольными отражателями на всех четырёх контейнерах, либо с двумя модулями полезной нагрузки с дипольными отражателями на ведомых контейнерах и двумя модулями полезной нагрузки с тепловыми ловушками на основных контейнерах. На ведомых контейнерах можно устанавливать только модули полезной нагрузки с дипольными отражателями; модули полезной нагрузки с тепловыми ловушками можно устанавливать только на основных контейнерах.
Узел основного контейнера
💡 Управление узлом основного контейнера осуществляется автоматически наземным экипажем в DCS в соответствии с загрузкой AN/ALE-40, выбранной в меню загрузки.
Один узел основного контейнера установлен на внешней стороне каждого внутреннего пилона вооружения. Он состоит из переключателя секвенсора, узла казённой части, переключателя автоматического выключателя RESET/OPERATE, переключателя управления полезной нагрузкой, переключателя предохранительного штифта с предохранительным штифтом и предупреждающей лентой, а также соответствующих электрических цепей. Переключатель секвенсора преобразует команды запуска в отдельные сигналы запуска для каждого пиротехнического запала как в основном, так и в ведомом контейнерах. Узел казённой части обеспечивает интерфейс для установки модулей полезной нагрузки с дипольными отражателями или тепловыми ловушками. Установка предохранительного штифта отключает электропитание обоих контейнеров, установленных на пилонах. После загрузки полного модуля с дипольными отражателями или тепловыми ловушками переключатель RESET/OPERATE устанавливается в положение OPERATE. Секции дипольных отражателей или тепловых ловушек будут срабатывать последовательно. После полёта, если остаётся частичная загрузка дипольных отражателей или тепловых ловушек, переключатель следует оставить в положении OPERATE. Если переключатель переведён в положение RESET, пустые станции дипольных отражателей или тепловых ловушек необходимо пропустить, прежде чем сработают загруженные станции. Переключатель выбора полезной нагрузки в положениях C (дипольные отражатели) и F (тепловые ловушки) определяет только режим развёртывания основного контейнера и устанавливается автоматически в DCS в соответствии с выбранной загрузкой.
Узел ведомого контейнера
💡 Положение переключателя выбора полезной нагрузки по умолчанию установлено в CS (одиночный сброс дипольных отражателей). Однако его также можно установить в CD (двойной сброс дипольных отражателей) через редактор миссий.
Один узел ведомого контейнера установлен на внутренней стороне каждого внутреннего пилона вооружения. Он содержит переключатель выбора полезной нагрузки для установки одиночного или двойного сброса дипольных отражателей, узел казённой части и соответствующие электрические цепи. Если переключатель выбора полезной нагрузки оставлен в положении CS по умолчанию, при каждой команде сброса дипольных отражателей будет сбрасываться один патрон с дипольными отражателями. Если переключатель выбора полезной нагрузки установлен в положение CD, два патрона с дипольными отражателями будут сбрасываться одновременно, по одному из каждого контейнера, при каждой команде сброса дипольных отражателей. Узел казённой части обеспечивает интерфейс для установки модуля полезной нагрузки с дипольными отражателями.
Адаптер корпуса тепловых ловушек
Адаптер корпуса тепловых ловушек установлен между узлом основного контейнера и модулем полезной нагрузки с тепловыми ловушками. Клиновидный адаптер гарантирует, что тепловые ловушки будут выбрасываться назад и вниз от самолёта. Его нельзя установить на ведомый контейнер.
Модуль полезной нагрузки с дипольными отражателями и патроны
Модуль полезной нагрузки с дипольными отражателями крепится к узлу казённой части основного или ведомого контейнера с помощью четырёх быстросъёмных креплений. Патрон с дипольными отражателями состоит из основного пластикового корпуса, дипольных отражателей и пластиковой торцевой крышки. При сбросе дипольные отражатели выбрасываются из корпусов, оставляя после себя одноразовый корпус и пустой корпус запала. Основание патрона имеет углубление для пиротехнического запала дипольных отражателей.
🔴 ПРЕДУПРЕЖДЕНИЕ: Случайный выстрел патронов с дипольными отражателями может привести к травмированию персонала или повреждению самолёта.
Модуль полезной нагрузки с тепловыми ловушками и патроны
Модуль полезной нагрузки с тепловыми ловушками можно установить только на узел основного контейнера. Адаптер корпуса тепловых ловушек служит интерфейсом. Патрон с тепловыми ловушками состоит из металлического внешнего корпуса, элемента тепловой ловушки, предохранительного и пускового устройства и пластиковой торцевой крышки. Углубление в основании патрона обеспечивает правильную установку тепловой ловушки.
🔴 ПРЕДУПРЕЖДЕНИЕ: Случайный выстрел патронов с тепловыми ловушками может привести к травмированию персонала или повреждению самолёта.
Пиротехнические запалы дипольных отражателей/тепловых ловушек
Пиротехнические запалы дипольных отражателей устанавливаются непосредственно перед использованием и хранятся отдельно от патронов с дипольными отражателями. Они имеют металлический корпус и запускаются электрически.
Пиротехнические запалы тепловых ловушек имеют больший диаметр и имеют канавку для уплотнительного кольца. Они устанавливаются непосредственно перед использованием и хранятся отдельно от патронов с тепловыми ловушками.
Приёмник радиолокационного предупреждения
ALR-46 (далее RWR) - это пассивная система ситуационной осведомлённости F-4E для обнаружения воздушных и наземных радиолокационных угроз. Система принимает сигналы от нескольких пар направленных антенн, установленных в задней части фюзеляжа, на каждой законцовке крыла и под носом; разница в относительном времени обнаружения и угле между антеннами используется системой для определения относительного пеленга на излучающий радар. Дальнейшая обработка принятого излучения соотносит его с сохранённым каталогом угроз для идентификации типа излучателя, а также для определения относительной дальности до угрозы как функции принятой мощности по сравнению с известной выходной мощностью.

🚧 ALR-46 в настоящее время установлен в корпусе более ранней модели RWR APR-36.
Результирующий обработанный сигнал угрозы затем отображается на ЭЛТ-дисплее (электронно-лучевая трубка) RWR, причём пеленг на излучатель показан на дисплее с верхом относительно носа (12 часов) и низом относительно хвоста (6 часов), а также близостью к центру относительно расчёта системой уровня угрозы - причём более близкие показания представляют большую опасность, а те, что находятся внутри среднего кольца, классифицируются как находящиеся в пределах дальности поражения. При нормальной работе ALR-46 может отображать 16 угроз на ЭЛТ одновременно. Угроза с наивысшим приоритетом, рассчитанная каталогом угроз и дальности ALR-46, отображается на дисплее с ромбом, наложенным на её символ; это называется функцией «плавающего» ромба, причём ALR-46 определяет приоритет. В случае возможного поражения излучателем угрозы (одновременно с включением кнопок ACTIVITY и/или MISSILE LAUNCH) событие обозначается кругом вокруг символа излучателя.
🚧 Имейте в виду, что симуляция всё ещё совершенствуется, поэтому ожидается, что поведение устройства, а также звуки изменятся.
Органы управления ALR-46
Ручка интенсивности дисплея RWR
Ручка интенсивности, расположенная рядом с дисплеем ситуации RWR в левом нижнем углу панели, работает как регулятор яркости для управления яркостью отображаемых отражений RWR. Вращение по часовой стрелке увеличивает яркость, вращение против часовой стрелки уменьшает яркость.
Индикаторы строба избыточного шума

Во время нормальной работы три T-образных индикатора появляются в положениях 9, 12 и 3 часа рядом с центром ЭЛТ RWR. Эти индикаторы сигнализируют об отсутствии избыточного шума в обнаружении усилителя низкого (
Четвёртый индикатор может появиться как часть SYS TEST или цикла включения. Этот четвёртый индикатор в положении 6 часов не выполняет никаких функций.
Панель управления ALR-46

Панель управления ALR-46 состоит из десяти многофункциональных подсвечиваемых кнопок, а также пары поворотных ручек для управления громкостью системы и яркостью панели.
Органы управления продублированы для пилота и WSO. Органы управления пилота находятся непосредственно под индикатором RWR, а органы управления WSO находятся под центральным индикатором в передней части обзора.
Mode
ALR-46 по умолчанию при включении переходит в режим OPEN (
Search
По умолчанию ALR-46 запрограммирован на приоритизацию и отображение излучателей, связанных с оружием, которое может поразить и уничтожить самолёт. Однако миссии потребуют мониторинга систем дальнего обнаружения и поиска, работающих с большей длительностью импульса для обнаружения и отслеживания возможных нарушителей на большой дальности - то есть F-4. Эти излучатели можно отобразить с помощью режима Search
(
Из-за их низкого приоритета угрозы важно отметить, что символика радара поиска часто может исчезать с дисплея из-за их пониженной важности - особенно когда ALR-46 переведён в режим PRIORITY.
Handoff
Кнопка Handoff (
В случае, если излучатель находится в плотной группе других символов на дисплее, будет применён режим TGT SEP.
Когда символ ромба зафиксирован, звук Handoff можно услышать через внутреннюю связь. Это постоянный синтетический тон, генерируемый в системе на основе текущей PRF (частоты повторения импульсов) данного излучателя. На него не влияет принятая мощность, поэтому амплитуда не будет меняться со временем, как в некоторых других системах.
Launch
В случае, если запуск ракеты обнаружен путём приёма дискретных команд наведения ЗРК, индикаторы MISSILE LAUNCH на этой кнопке (
💡 Имейте в виду, что ALR-46 может обнаруживать запуски ракет только от определённых систем.

Altitude
ALR-46 использует высоту собственного самолёта в качестве определяющего аспекта приоритета угрозы, поэтому угрозы от зенитной артиллерии (AAA) и ЗРК малой высоты теряют приоритет, если самолёт находится на высоте, которая, по оценкам, находится за пределами их зоны поражения. Активация режима LOW ALT (
Target Separation
В случае, если несколько излучателей обнаружены на таком близком расстоянии, что символика перекрывается на дисплее RWR, кнопка Target Separation (
System Test
Тест включения системы (
Эта кнопка также используется при переключении файлов угроз. Точная процедура описана в разделе Символика.
Unknown
Когда обнаружен излучатель, для которого нет записи в каталоге, но который распознаётся по принятой мощности, длительности и импульсу как возможная угроза, индикатор U на кнопке Unknown (
Положение по умолчанию кнопки Unknown - с постоянно горящим символом U.
Activity Power
В случае обнаружения команд наведения ЗРК загорится кнопка ACTIVITY (

System Power
Кнопка System Power (
В случае сбоя питания системы ALR-46 имеет функцию автоматического перезапуска. После восстановления питания приёмник перезапустится после пятнадцатисекундной задержки, в дополнение к 9-секундному самотестированию при включении. Система возобновит работу в том же состоянии, что и при обычном перезапуске - с отключённым режимом Search и приоритетом высоты, как при потере питания.
Ручка громкости
Ручка AUDIO (
Ручка DIM (регулятор яркости)
Ручка DIM (
Звуковые сигналы
Звук New Guy
Звуковой сигнал, издаваемый при первом отображении нового излучателя или при изменении PRF (частоты повторения импульсов) существующего дисплея, называется звуком New Guy. Он состоит из трёх звуковых сигналов в течение 1,5 секунды, каждый с PRF излучателя, который имеет символ ромба. Звук New Guy предупреждает члена экипажа об изменении обстановки угрозы, чтобы он мог проверить свой азимутальный индикатор на наличие обновлений. Регулятор AUDIO на индикаторе-контроллере может регулировать громкость от максимальной до полного отключения.
Звук запуска
Синтетический тон запуска, генерируемый, когда излучатель переходит в состояние запуска, называется звуком запуска или звуком прерывания ML. Он состоит из примерно семи звуковых сигналов в течение 1,5 секунды от генератора тона 1 кГц в процессоре сигналов. На каждый запуск генерируется только один звук запуска; то есть после примерно семи звуковых сигналов звук запуска от этого излучателя не слышен.
Громкость звука запуска регулируется основной ручкой громкости RWR, а также специальной ручкой громкости ML в каждой кабине. Результирующая громкость зависит от положения обеих ручек.
Символика
ALR-46 имеет ограниченное количество символов для различных радиолокационных угроз. Следующие символы могут обозначать различные угрозы. ALR-46 может сохранять до трёх файлов, содержащих таблицы угроз.
- Файл земли (по умолчанию) - наземные и воздушные угрозы
- Файл моря - морские и воздушные угрозы
- Учебный файл - дополнительные настраиваемые угрозы (по умолчанию пуст)
Пилот может переключаться между файлом земли и учебным файлом, просто нажав SYS TEST (
Наземные и воздушные угрозы
| Символ | Возможная угроза |
|---|---|
 | SA-2 С-75 «Десна» TR |
 | SA-2 С-75 РЛС подсвета и наведения «Волга» |
 | SA-3 С-125 «Нева» TR |
 | SA-5 С-200 «Ангара/Вега» TR |
 | SA-6 «Куб» TR |
 | HQ-7 TR |
 | 9К33 «Оса» 9A33 |
 | SA-10 С-300ПС «Факел» |
 | SA-11 9K37 «Бук» |
 | SA-15 9K331 «Тор» |
 | SA-19 2K22 «Тунгуска» |
 | ЗСУ-23-4 «Шилка» |
 | РЛС управления огнём «Шилка» |
 | «Гепард», C-RAM «Фаланкс» |
 | MIM-23 «Хок» |
 | MIM-104 «Пэтриот» |
 | «Рапира», «Роланд» |
 | SA-6 «Куб» SR, «Роланд» SR, C-Ram «Фаланкс» SR, ППРУ-1 «Овод-1», HQ-7 SR, Hawk CWAR, NASAMS, «Рапира» Dagger, SA-11 «Снежный дрейф», SA-10 «Большая птица», С-300ПС 40Б6МД SR |
 | E-2D Hawkeye, E-3C Sentry, А-50 |
 | F-14, F-15C, F-15E, F-16, F/A-18C, JF-17, M-2000C, МиГ-29, Су-27, МиГ-31, Tornado IDS/GR4 |
 | F-1, AJS-37, F-4E, МиГ-19, МиГ-21, МиГ-23, F-5E-3 |
 | Неизвестно (низкий диапазон) |
 | Неизвестно (средний диапазон) |
 | Неизвестно (высокий диапазон) |
Морские и воздушные угрозы
| Символ | Возможная угроза |
|---|---|
 | «Редут», «Альбатрос» |
| Тяжёлый атомный ракетный крейсер «Пётр Великий», ракетный крейсер «Москва», эсминец типа 052C, фрегат «Неустрашимый» |
| Фрегат типа 054A, эсминец типа 052B |
 | ТАВКР «Адмирал Флота Советского Союза Кузнецов» |
| La Combattante II |
 | Тип 071, класс «Леандр» |
| Класс «Ропуча» |
 | CVN-71 «Теодор Рузвельт», CVN-72 «Авраам Линкольн», CVN-73 «Джордж Вашингтон», CVN-74 «Джон С. Стеннис», CVN-75 «Гарри С. Трумэн», USS «Форрестол», LHA «Тарава» |
 | «Оливер Хазард Перри» |
 | Класс «Леандр» |
| «Тикондерога», USS «Арли Бёрк» |
| «Редут» SR, «Неустрашимый» SR, «Инвинсибл» SR, «Леандр» SR, «Слава» SR, «Кузнецов» SR, «Ропуча» SR |
| E-2D Hawkeye, E-3C Sentry, А-50 |
| F-14, F-15C, F-15E, F-16, F/A-18C, JF-17, M-2000C, МиГ-29, Су-27, МиГ-31, Tornado IDS/GR4 |
| F-1, AJS-37, F-4E, МиГ-19, МиГ-21, МиГ-23, F-5E-3 |
| Неизвестно (низкий диапазон) |
| Неизвестно (средний диапазон) |
| Неизвестно (высокий диапазон) |
Ракеты
| Символ | Возможная угроза |
|---|---|
 | коррелированная ракета |
 | некоррелированная ракета |
Средства радиоэлектронного противодействия
"У него есть ECM, у него есть ECCM, IBM, ребята, мы дадим вам M&M's"
Фантом может быть оснащён контейнерами ECM, способными подавлять радиолокационные сигналы, чтобы защитить его от отслеживания другими самолётами или ракетами с радиолокационным наведением.
За время своей службы он использовал ряд контейнеров с различными возможностями.
Ранние контейнеры, такие как AN/ALQ-71 или AN/ALQ-87, эффективно использовались во время Вьетнамской войны. В середине 1970-х годов в основном использовались AN/ALQ-119 и AN/ALQ-131.
Фантом поддерживает контейнеры ECM на двух внутренних пилонах крыла (станции 4 и 6) и на внутренних пилонах крыла (станции 2 и 8). Однако сигналы ECM соединены цепочкой с каждой стороны соответственно, что позволяет управлять только одним контейнером постановщика помех на каждой стороне. Кроме того, многие контейнеры имеют ограничения, позволяющие устанавливать их только на определённые пилоны. Например, AN/ALQ-119 и AN/ALQ-131 нельзя установить на правый внутренний пилон (станция 6).
💡 Из-за ограничений движка мы не можем влиять на эффективность постановщиков помех Фантома. Установка нескольких контейнеров не увеличивает их мощность или зону покрытия.
Органы управления

Всеми системами радиоэлектронного противодействия управляет WSO с помощью органов управления на правой вспомогательной панели.
Органы управления продублированы для любого контейнера, установленного на левых станциях (
Интерпретация режимов, методов и точной работы индикаторов (
Как правило, постановщики помех различают два режима или метода, которые можно использовать. Оба обычно имеют фазу прогрева, обозначенную индикаторами Standby на панели.
Ручку (
Некоторые модели постановщиков помех также могут определять, что они активно подавляют вражеский радар, что обозначается индикатором AI.
🔴 ПРЕДУПРЕЖДЕНИЕ: Чтобы предотвратить воздействие излучения на персонал, ручку режима нельзя устанавливать в положение XMIT, находясь на земле.
Кнопка и индикатор сброса

Индикатор сброса (
В случае неисправности можно нажать кнопку сброса (
AN/ALQ-131

На вооружении с 1970 по 1990 год; нельзя установить на правую внутреннюю станцию 6.
Методы 1 и 2 идентичны и требуют периода прогрева около 3 минут перед активацией.
💡 Логика прогрева жёстко задана - выключение и включение контейнера или кратковременная потеря питания приведут к тому, что перед использованием снова потребуется полный период прогрева.
Индикаторы Standby загораются, чтобы указать, что фаза прогрева завершена, и метод готов к активации.
Контейнер может перегреться, и в этом случае загорится индикатор неисправности. В этом случае обязательно немедленно переведите режим в Standby и дайте ему остыть. Игнорирование индикатора приведёт к расплавлению частей контейнера, что нанесёт ему непоправимый ущерб.
🟡 ВНИМАНИЕ: В качестве эмпирического правила не передавайте сигнал дольше 20 минут без охлаждения между использованиями. Ограничьте непрерывный медленный полёт на малой высоте при работе с постановщиком помех до 30 минут. Для экстремальных температур наружного воздуха отрегулируйте ограничения соответствующим образом.
Аварийные системы
Сигнальные лампы и индикаторы
Панель сигнальных ламп

Большинство сигнальных ламп кабины находятся на панели сигнальных ламп на правой вспомогательной панели в передней кабине. См. Дополнение по аварийным процедурам для получения краткого списка или см. список ниже:
| Индикатор | Описание | Индикатор | Описание | Индикатор | Описание |
|---|---|---|---|---|---|
| Alt Encoder out | Индикатор загорится, если сигнал от блока кодирования высоты ненадёжен или отсутствует. Он также может загораться на короткое время во время набора высоты с большой скоростью, манёвров пикирования или во время трансзвукового полёта. | ||||
| IFF | Индикатор загорится, когда код режима 4 обнулён или код не введён. | DC Bus | Индикатор загорится, если оба генератора выйдут из строя или произойдёт падение напряжения между основной шиной постоянного тока и аварийной шиной постоянного тока. | ||
| Canopy Unlocked | Индикатор загорится, если оба генератора выйдут из строя или произойдёт падение напряжения между основной шиной постоянного тока и аварийной шиной постоянного тока. | Hook down | Индикатор загорится, если тормозной крюк не поднят и не зафиксирован. | ||
| Autopilot Ptich Trim | Индикатор загорится, когда AFCS включён, а автоматическое отслеживание триммера тангажа не работает или значительно отстаёт от манёвров самолёта. | Autopilot Disengage | Индикатор загорится при отключении автопилота после первоначального включения AFCS. | ||
| Left Ext Fuel | Индикатор загорится, если выбраны внешние топливные баки, и нет потока топлива из бака в фюзеляж. | CTR Ext Fuel | Индикатор загорится, если выбраны внешние топливные баки, и нет потока топлива из бака в фюзеляж. | Right Ext Fuel | Индикатор загорится, если выбраны внешние топливные баки, и нет потока топлива из бака в фюзеляж. |
| Fuel Level Low | Индикатор загорится, когда уровень топлива в баках 1 и 2 достигнет заданного уровня топлива 1650 ± 200 фунтов. | CHK Fuel Filters | Индикатор загорится, когда топливный фильтр засорится. Фильтр автоматически открывается в обход, обеспечивая нормальный поток топлива к двигателю. | ||
| L Anti Ice On | Индикатор загорится, когда система отбора воздуха для противообледенения включена. | R Anti Ice On | Индикатор загорится, когда система отбора воздуха для противообледенения включена. | Static Corr Off | Индикатор загорится, если SPC выйдет из строя или переключатель CADC будет установлен в положение CORR OFF. |
| L Aux Air Door | Индикатор загорится, когда левая вспомогательная воздушная заслонка будет работать не синхронно с рычагом шасси. | R Aux Air Door | Индикатор загорится, когда правая вспомогательная воздушная заслонка будет работать не синхронно с рычагом шасси. | Speedbrake out | Индикатор загорится, если воздушный тормоз выпущен или не полностью закрыт. |
| Windshield Temp High | Индикатор загорится, когда лобовое стекло достигнет температуры, которая вызовет оптические искажения при использовании системы удаления дождя с лобового стекла. Систему удаления дождя с лобового стекла следует немедленно выключить. | Check Hyd Gauges | Индикатор загорится, если давление в любой системе упадёт ниже 1500 ± 100 фунтов на квадратный дюйм. | ||
| Slats In | Индикатор загорится, если переключатель отключения предкрылков будет установлен в положение IN, что приведёт к остановке движения предкрылков в зависимости от угла атаки. | Pitch Aug Off | Индикатор загорится, когда питание самолёта включено, а переключатель стабилизации тангажа не включён. | Cabin Turb Overspeed | TИндикатор загорится, если турбина кабины холодильной установки подвергнется давлению и температуре, превышающим нормальные рабочие значения. |
| Inertial Nav Sys Out | Индикатор загорится, если инерциальная навигационная система выйдет из строя или будет отключена. | Tank 7 Fuel | Индикатор загорится, если топливный перекачивающий клапан бака 7 не откроется. | ||
| Oxygen Low | Индикатор загорится, когда количество кислорода станет меньше 1 литра. | Fire Sys | Индикатор загорается, когда либо перегорает сенсорная трубка детектора пожара/перегрева, либо провод детектора перетирается до замыкания на массу, либо выходит из строя блок управления. |
Главное предупреждение Master Caution

MASTER CAUTION, расположенный в передней кабине, предоставляет пилоту предварительное предупреждение о потенциальной опасности для самолёта. MASTER CAUTION загорается одновременно с большинством сигнальных ламп на панели сигнальных ламп и индикаторами генератора; предупреждения, которые не включают MASTER CAUTION, отмечены в списке панели сигнальных ламп.
MASTER CAUTION может быть отключён пилотом нажатием кнопки сброса на правой консоли. Однако важно отметить, что нажатие MASTER CAUTION не сбрасывает предупреждение на панели сигнальных ламп; вместо этого предупреждение будет оставаться до тех пор, пока не будет устранено. Если второе событие произойдёт в системе, которая уже выдаёт предупреждение на панели сигнальных ламп, MASTER CAUTION не загорится во второй раз.
Цепь тестирования сигнальных ламп
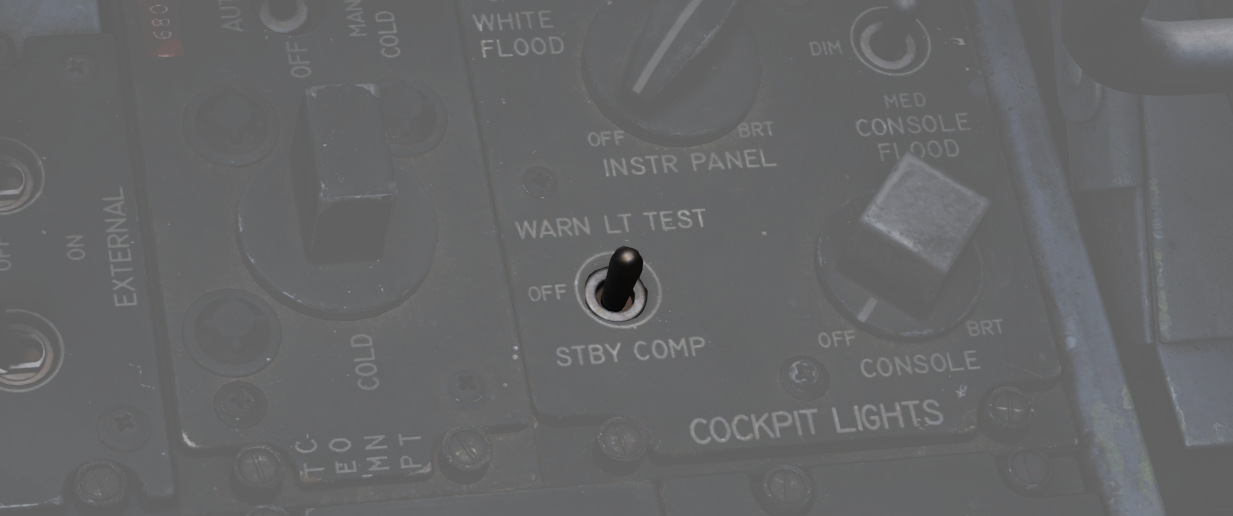
Подтверждение работы ламп можно выполнить с помощью цепи тестирования сигнальных ламп, расположенной на панели управления внутренним освещением в обеих кабинах. Они не выполняют функциональный тест отдельных систем предупреждения, а только подтверждают, что индикаторы загорятся.
Система обнаружения пожара и перегрева двигателя

На правой верхней панели приборов в передней кабине расположены четыре сигнальные лампы - две FIRE и две OVRHEAT, по одной на каждую сторону. Если в моторном отсеке обнаружен пожар, загорится соответствующая лампа FIRE. Датчики перегрева установлены в задней части фюзеляжа рядом с соплами двигателя и зажгут соответствующую лампу OVRHEAT, если температура станет опасной для самолёта.
Кнопка тестирования пожарной сигнализации
При нажатии эта кнопка проверяет работоспособность индикаторов FIRE и OVRHT. Также может использоваться в сочетании с переключателем тестирования сигнальных ламп для проверки работы систем обнаружения пожара и перегрева. Тест выполняется путём удержания переключателя тестирования сигнальных ламп в положении WARN TEST, а затем одновременного нажатия и отпускания кнопки тестирования пожарной сигнализации. Правильная работа системы подтверждается тем, что четыре индикатора FIRE и OVRHT не горят, пока кнопка тестирования пожарной сигнализации нажата, а затем загораются при её отпускании.
Катапультные кресла

Phantom II использует катапультное кресло Martin Baker Mk. H-7 в обоих положениях для безопасной эвакуации экипажа в случае потери самолёта. Запуск катапультирования с помощью лицевой шторки или нижних ручек катапультирования приводит к срабатыванию установленного на кресле инициатора, который сбрасывает фонарь. Как только фонарь отделится от самолёта, срабатывает основной заряд катапультной пушки, отсоединяя кресло от кабины и запуская подъём кресла. По мере подъёма кресла фиксаторы на ногах оттягивают их назад для обеспечения свободного пространства, и устанавливается таймер тормозного парашюта. На соответствующей высоте трос, соединяющий инициатор ракетного двигателя с самолётом, нажимает на ударник основного ракетного двигателя, чтобы отделить кресло от самолёта. Ранее установленная пушка тормозного парашюта срабатывает в этот момент, выпуская пару небольших парашютов для стабилизации кресла по ориентации и начала замедления.
Как только кресло достигнет заданной барометрической высоты от 11 500 до 14 500 футов, или на мгновение после стабилизации, если высота ниже, ножничные механизмы отсоединяют члена экипажа с сиденьем, содержащим комплект выживания, от рамы катапультного кресла и выпускают основной парашют. В случае катапультирования ниже высоты баростата парашют WSO полностью выпускается через 5 секунд после запуска катапультирования, а парашют пилота - через секунду.
Индикатор катапультирования

В случае потери питания внутренней связи пилот может предупредить WSO о необходимости подготовиться к катапультированию, нажав переключатель EJECT, расположенный на левом борту фонаря перед переключателем закрылков. Это включает пару сигнальных ламп, расположенных на панели индикаторов задней кабины.

Ручка селекторного клапана команд

Слева и над панелью приборов задней кабины находится ручка селекторного клапана команд. Эта ручка определяет последовательность катапультирования, запускаемого из заднего сиденья - оба кресла или только заднее сиденье. Ручка имеет надпись PLT EJECT PULL TURN. Когда ручка ориентирована вертикально, выбрано катапультирование одного кресла; чтобы установить катапультирование двух кресел, ручка поворачивается по часовой стрелке до горизонтального положения.
Все катапультирования, запускаемые из переднего сиденья, являются катапультированием двух кресел.
Система сброса

Большинство боеприпасов, которые несёт F-4, можно сбросить с самолёта в полёте с убранным шасси и закрытыми створками. Сброс не удаляет пилоны, а AIM-9 Sidewinder не сбрасывается.
| Название | Описание |
|---|---|
| OFF | Блокирует кнопку PUSH TO JETT на панели селектора сброса. |
| STORES | Сбрасывает все MER/TER, одиночные, установленные на LAU-88 боеприпасы или подвесные баки при нажатии PUSH TO JETT. |
| L/R FWD | Сбрасывает AIM-7 с соответствующей позиции при нажатии PUSH TO JETT. Заблокировано, если горит CL TK ON. |
| L/R AFT | Сбрасывает AIM-7 с соответствующей позиции при нажатии PUSH TO JETT. |
| L/R WING | В сочетании с TV или ARM сбрасывает одиночную AGM-65 Maverick или AGM-45 Shrike с крыла при нажатии PUSH TO JETT. |
Кнопка аварийного сброса внешних боеприпасов

Кнопка аварийного сброса внешних боеприпасов, также известная как тревожная кнопка, расположенная на левой вспомогательной панели передней кабины, сбросит все боеприпасы "воздух-земля", внешние баки и любые сбрасываемые контейнеры. Ракеты Sparrow и Sidewinder, а также все пилоны останутся на месте. Нажатие кнопки покажет жёлтую краску внутри её углубления, чтобы подтвердить её срабатывание. Выполнение этого действия автоматически отключает перекачку топлива из внешних баков, обеспечивая правильный поток топлива из внутренних баков крыла без дальнейших действий пилота. Кнопка активна, пока шасси самолёта убрано, или, в случае отказа переднего рычага шасси, пока задний рычаг шасси остаётся в положении IN, и нет нагрузки на колёса.
Выборочный сброс

Боеприпасы на крыльях и центральной линии можно сбрасывать независимо друг от друга, используя ручку сброса в положении STORES, выбирая желаемые кнопки выбора станции для сброса и нажимая PUSH TO JET. Любой пилон или пусковая установка ракеты на станции останутся на месте, но боеприпасы, включая MER и TER, будут сброшены.
Например, чтобы сбросить правый и левый внешние топливные баки, пилот должен выбрать STORES на ручке, нажать соответствующие кнопки выбора станции LO, RO, а затем нажать кнопку сброса.
Сброс AIM-7
Ракеты AIM-7 Sparrow сбрасываются по отдельности, используя положения L/R FWD или L/R AFT на ручке сброса, а затем нажимая PUSH TO JETT.
Сброс AGM-65
Чтобы сбросить ракеты AGM-65, выберите TV или ARM на ручке выбора оружия, нажмите желаемую кнопку (кнопки) выбора станции, выберите L WING или R WING на ручке сброса и нажмите PUSH TO JETT. Одна ракета сбрасывается при каждом нажатии; после того, как желаемые ракеты будут удалены с одного крыла, выберите другое крыло с помощью ручки сброса и повторите цикл PUSH TO JETT.
Оружие и боеприпасы
Эффективность F-4E, являющегося краеугольным камнем военно-воздушных сил по всему миру, обусловлена не только его передовой авионикой и конструкцией планера, но и его грозным арсеналом оружия и боеприпасов.
F-4E имеет три основных типа оружия «воздух-воздух»включая ракеты с тепловым наведением AIM-9 в различных вариантах, ракеты с полуактивным радиолокационным наведением AIM-7 в различных вариантах и пушку M61A1 Vulcan, которую можно использовать против воздушных и наземных целей.
Самолёт может быть вооружён различными бомбами, неуправляемыми ракетами, и управляемыми боеприпасами для поражения и нейтрализации наземных целей. Высокоточные боеприпасы, такие как бомбы с лазерным наведением, позволяют Phantom II поражать высокоценные цели с высокой точностью, сводя к минимуму сопутствующий ущерб и максимизируя успех миссии.
В дополнение к своему смертоносному вооружению F-4E может быть сконфигурирован с внешними топливными баками для увеличения дальности полёта. Самолёт также может нести специализированные боеприпасы, включая прицельные контейнеры и системы радиоэлектронной борьбы (РЭБ).
Загрузка
На следующей схеме представлен обзор всех боеприпасов, которые можно загрузить на станции.
💡 На практике не все комбинации могут быть возможны, так как существует множество технических факторов, приводящих к ограничениям.
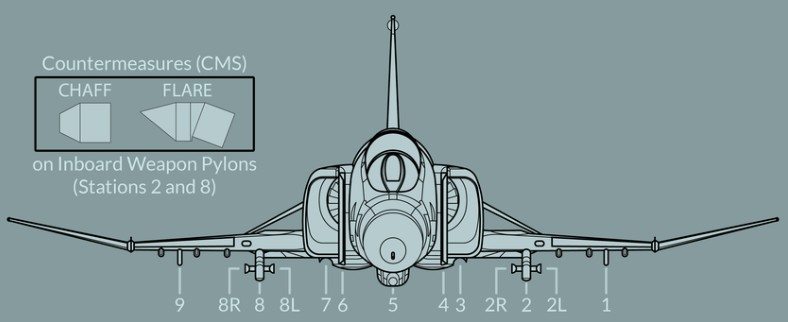
| Боеприпас/Станция | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | Всего |
|---|---|---|---|---|---|---|---|---|---|---|
| AIM-7 | 1 | 1 | 1 | 1 | 4 | |||||
| AIM-9 | (2) | (2) | 4 | |||||||
| AGM-12 | 1 | 1 | 1 | 1 | 4 | |||||
| AGM-45 | 1 | 1 | 1 | 1 | 4 | |||||
| AGM-62 | 1 | 1 | 2 | |||||||
| AGM-65 | 3 | 3 | 6 | |||||||
| MK-81 | 6 | 3 | 6 | 3 | 6 | 24 | ||||
| MK-82 | 6 | 3 | 6 | 3 | 6 | 24 | ||||
| Mk-83 | 2 | 3 | 3 | 3 | 2 | 13 | ||||
| Mk-84 | 1 | 1 | 1 | 1 | 1 | 5 | ||||
| M117 | 3 | 3 | 5 | 3 | 3 | 17 | ||||
| SAMP-250 | 3 | 3 | 3 | 3 | 3 | 15 | ||||
| Mk-20 | 3 | 6 | 3 | 12 | ||||||
| CBU-1/A | 2 | 1 | 2 | 5 | ||||||
| CBU-2/A | 2 | 1 | 2 | 5 | ||||||
| CBU-52 | 3 | 2 | 2 | 3 | 10 | |||||
| CBU-87 | 3 | 2 | 4 | 2 | 3 | 14 | ||||
| BL-755 | 2 | 3 | 3 | 3 | 2 | 13 | ||||
| GBU-10 | 1 | 1 | 1 | 1 | 4 | |||||
| GBU-12 | 1 | 2 | 2 | 1 | 6 | |||||
| GBU-24 | 1 | 1 | 1 | 1 | 4 | |||||
| BDU-33 | 6 | 3 | 6 | 3 | 6 | 24 | ||||
| BDU-45 | 1 | 2 | 2 | 1 | 6 | |||||
| BDU-50 | 6 | 3 | 6 | 3 | 6 | 24 | ||||
| BLU-107 | 3 | 6 | 3 | 12 | ||||||
| GBU-8 | 1 | 1 | 1 | 1 | 4 | |||||
| FFAR (×19) | 3 | 3 | 3 | 3 | 3 | 285 | ||||
| SUU-23 | 1 | 1 | 1 | 3 | ||||||
| SUU-25 (x8) | 2 | 2 | 2 | 48 | ||||||
| ALQ-131 | 1 | 1 | 1 | 3 | ||||||
| AN/AVQ-23 | 1 | 1 | ||||||||
| AN/ASQ-T50 | (2) | (2) | 4 | |||||||
| AN/ALE-40 | (1) | (1) | 2 | |||||||
| Топливный бак | 1 | 1 | 1 | 3 |
В общем, станции 3, 4, 6 и 7 можно использовать для установки ракет "воздух-воздух", а также контейнеров постановщика помех и целеуказателя.
Боеприпасы "воздух-земля" в основном устанавливаются на пилоны 1, 2, 5, 8 и 9.
Пилоны 2 и 8 особенные, так как их можно оснастить адаптером специального оружия (SWA) и иметь дополнительные точки крепления по бокам (обозначенные 2L, 2R, 8L, 8R) для установки ракет AIM-9 Sidewinder без занятия всего пилона.
💡 AIM-9 Sidewinder можно установить на пилон 2 и 8 в дополнение к другим боеприпасам. Следовательно, всё ещё можно установить, например, Maverick на тот же пилон.
Кроме того, контейнеры средств противодействия AN/ALE-40 можно установить на заднюю часть пилонов 2 и 8. Это позволяет самолёту нести в общей сложности 120 дипольных отражателей и 30 тепловых ловушек.
Пушки
Внутренняя пушка M61A1 Vulcan

Пушка General Electric M61 Vulcan наконец-то пошла на войну как неотъемлемая часть Фантома с появлением F-4E, при этом профиль носовой части и APQ-120 были модифицированы, чтобы вместить оружие. Шестиствольная вращающаяся пушка типа Гатлинга, вмещающая 639 патронов во внутреннем барабане, обеспечивает выбираемый пользователем темп стрельбы от 4000 до 6000 выстрелов в минуту, обеспечивая начальную скорость снаряда более 3450 футов в секунду, с доступными вариантами бронебойно-зажигательных и осколочно-фугасно-зажигательных патронов. Vulcan, полезная как в роли "воздух-воздух", так и в роли "воздух-земля", была использована для четырёх подтверждённых уничтожений ВВС США во Вьетнаме с F-4E.
Скопившиеся газы выпускаются набегающим воздухом, поступающим через дверь продувки пушки на носу самолёта. Дверь удерживается закрытой гидравлическим давлением и автоматически открывается для выпуска газов от стрельбы из пушки. Она закрывается после того, как давление газов упадёт ниже порогового значения или пушка будет обесточена, например, при переключении главного переключателя включения или после того, как все патроны будут выпущены.
💡 Процесс вентиляции занимает от 10 секунд до 1 минуты, в зависимости от продолжительности очереди.
🔴 ПРЕДУПРЕЖДЕНИЕ: Не запускайте двигатели, пока наземный персонал работает с дверью. Она принудительно закроется автоматически, как только будет получено гидравлическое давление.

Применение
Чтобы использовать M61, необходимо выбрать переключатель выбора станции GUN, главный переключатель включения должен быть в положении ON, а переключатель пушки на мизинцевом переключателе (назад) должен быть активирован. Это зажжёт индикатор GUN на индикаторе на лобовом стекле.
Для использования "воздух-воздух" оптический прицел следует перевести в режим A/A. В режиме "воздух-воздух" оптический прицел работает как упреждающий оптический прицел (LCOS), таким образом, маневрируя как по углу места, так и по азимуту относительно захваченной радаром цели, или по умолчанию на дальности 1000 футов, если захват отсутствует. При захвате шкала дальности отображается относительно 6700 футов слева от метки в положении 1 час до 1000 футов в положении 6 часов.

Для использования "воздух-земля" оптический прицел следует перевести в режим A/G, ручку режима доставки следует установить в режим OFF или Direct, и необходимо ввести желаемое значение снижения прицела в мил для предполагаемого профиля атаки. Снижение устанавливается относительно линии отсчёта фюзеляжа (FRL). Хотя снижение опустит сетку по углу места, сноса по азимуту из-за относительного движения самолёта нет.
Темп стрельбы пушки регулируется переключателем Rate на панели пьедестала и может быть выбран как High (6000 выстрелов в минуту) или Low (4000 выстрелов в минуту). Также на панели пьедестала находится индикатор оставшихся патронов пушки.
Следует отметить функцию автоматической очистки; пушка сделает примерно от 5 до 11 выстрелов с момента отпускания пилотом спускового крючка, чтобы очистить все затворы в пушке; этот процесс раскрутки занимает примерно одну секунду, и пушка не может стрелять во время этой операции. Хотя на панели пьедестала есть переключатель автоматической очистки, этот переключатель не управляет внутренней пушкой M61A1 и может только отключать очистку патронов для установленных в контейнерах внешних пушек.
Снижение прицела
Для применения внутренней пушки "воздух-земля" следует использовать следующие значения снижения прицела.
| Высота | Скорость | Угол пикирования | Снижение прицела |
|---|---|---|---|
| 3000 футов | 425 - 450 KCAS | 10 - 15° | 100 - 110 мил |
| 2500 футов | 425 - 450 KCAS | 10 - 15° | 80 - 90 мил |
| 2000 футов | 425 - 450 KCAS | 10 - 15° | 70 мил |
| 1500 футов | 425 - 450 KCAS | 10 - 15° | 50 - 55 мил |
| 1000 футов | 425 - 450 KCAS | 10 - 15° | 40 - 45 мил |
Внешние пушечные контейнеры SUU-16/A и SUU-23/AA

Созданные как для обеспечения возможности стрельбы из пушки самолётам, которые не имели её внутри, так и для увеличения доступного прямого огня в миссии непосредственной авиационной поддержки, пушечные контейнеры SUU-16/A и SUU-23/A были построены на базе M61A1 и имели боезапас 1200 патронов. Оба контейнера имеют фиксированный темп стрельбы 6000 выстрелов в минуту, и до трёх из них могут быть установлены одновременно и управляться системой управления огнём; хотя для перегонки можно установить до пяти, и рекламные изображения показывали такую конфигурацию, активировать можно только три.
💡 Внутренние пилоны крыла 2 и 8 не подключены для работы с контейнерами. Стрелять из пушек могут только центральная станция и внешние пилоны крыла.
Основное различие между контейнерами -16/A и -23/A заключается в способе их питания; первый использует воздушную турбину для привода своего двигателя, а второй питается от внутренней сети. Эта разница повлияла на относительную полезность - в то время как -23/A можно было стрелять на любой воздушной скорости, что позволяло устанавливать его на более медленные самолёты, воздушная турбина -16/A требовала минимальной скорости 300 узлов для стрельбы и достигала своей оптимальной производительности только на скорости выше 400 узлов. Оба контейнера имеют функцию автоматической очистки для безопасности, которая приводит к тому, что патроны, загруженные в казённую часть, сбрасываются обратно в магазин боеприпасов, что влечёт за собой кратковременную задержку в одну-две секунды, прежде чем можно будет снова стрелять из контейнера.
Применение снаружи
Активация контейнеров SUU выполняется путём выбора соответствующих кнопок выбора станциии установки ручки режима доставки в положение OFF или Direct. Ручка выбора оружия может находиться в любом положении, кроме TV или ARM, если не активирован режим CAGE. Следует выбрать желаемую настройку автоматической очистки и установить главный переключатель включения в положение ON, чтобы активировать контейнер. На SUU-16 активация главного переключателя включения выпускает воздушную турбину.
Установленные пушки совмещены с линией отсчёта фюзеляжа. Таким образом, при установке оптического прицела в режим "воздух-воздух" снаряды будут падать в соответствии с центром сетки, как и основная пушка, только с естественным смещением от положения их соответствующего пилона, что обеспечивает эффективную естественную стрельбу, если только это не влияет на умеренное увеличение результирующего CEP. Аналогичным образом, в режиме "воздух-земля" контейнеры SUU демонстрируют те же характеристики относительно графика снижения сетки, что и внутренняя пушка, опять же с их соответствующими смещениями от центральной линии и увеличением CEP.
Чтобы обезопасить пушечные контейнеры после боя, перед отключением главного переключателя включения переключатель автоматической очистки следует установить в положение Auto Clear, кратковременно нажать на спусковой крючок и нажать соответствующие кнопки выбора станции, чтобы выключить их. На SUU-16 это закроет воздушную турбину.
Снижение внешнего прицела
Для применения внешних пушечных контейнеров "воздух-земля" следует использовать следующие значения снижения прицела.
| Высота | Скорость | Угол пикирования | Снижение прицела |
|---|---|---|---|
| 3000 футов | 425 - 450 KCAS | 10 - 15° | 80 - 85 мил |
| 2500 футов | 425 - 450 KCAS | 10 - 15° | 65 мил |
| 2000 футов | 425 - 450 KCAS | 10 - 15° | 50 мил |
| 1500 футов | 425 - 450 KCAS | 10 - 15° | 30 мил |
| 1000 футов | 425 - 450 KCAS | 10 - 15° | 10 - 15 мил |
Оружие "воздух-воздух"
F-4E Phantom II является вечным свидетельством превосходства в воздухе, во многом благодаря своим грозным возможностям "воздух-воздух".
Ракета AIM-7 Sparrow занимает центральное место в возможностях Фантома II "воздух-воздух". Составляя значительную часть вооружения F-4E "воздух-воздух", управляемая по радару система Sparrow позволяет пилотам атаковать противников до того, как они войдут в зону визуальной видимости.

В ближнем бою F-4E полагается на AIM-9 Sidewinder, ракету ближнего действия с инфракрасным наведением, известную своей маневренностью и быстротой реакции. Являясь жизненно важным компонентом вооружения Фантома II "воздух-воздух", Sidewinder превосходно справляется с интенсивными и динамичными сценариями воздушных боёв.
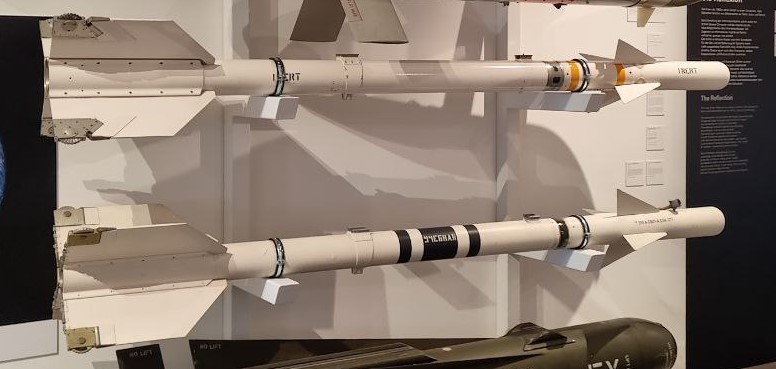
AIM-7 Sparrow

AIM-7 - это ракета с полуактивным радиолокационным наведением с максимальной дальностью запуска около 26 морских миль.
Первоначально получившая обозначение AAM-N-6 Sparrow III, AIM-7 Sparrow поступила на вооружение ВМС США в 1958 году. В отличие от AIM-7A (AAM-N-2 Sparrow I) с лучевым наведением, которая требовала, чтобы запускающий самолёт удерживал цель на линии визирования во время полёта оружия, AIM-7C с полуактивным радиолокационным наведением могла эффективно поражать маневрирующую цель вне линии визирования, при условии, что радар самолёта-целеуказателя мог поддерживать захват цели во время перехвата ракеты. AIM-7C быстро уступила место 7D, которая сбила несколько целей во Вьетнаме, и 7E, которая сбила большинство целей этого типа в Юго-Восточной Азии. Кроме того, F-4E получил совместимость с AIM-7F и AIM-7M.
Использование AIM-7 начинается с настройки бортовых ракет, которая выполняется с помощью переключателя RDR MSL , устанавливая его в положение CW ON. Этот процесс настройки занимает примерно одну минуту и может быть запущен после того, как питание подаётся на радар не менее одной минуты (любое положение, кроме OFF) в большинстве условий эксплуатации (температура окружающей среды ниже 90 градусов по Фаренгейту). Ракеты правильно настроены, когда индикатор состояния ракеты (RDR) горит на каждой станции, несущей ракету Sparrow, не менее одной минуты. После успешной настройки переключатель RDR MSL можно вернуть в положение STBY (ожидание). Индикаторы состояния погаснут после возврата в STBY. После входа в зону боевых действий переключатель RDR MSL следует вернуть в положение CW ON, чтобы поддерживать правильное состояние настройки ракет во время боя.
Применение
Чтобы использовать AIM-7, оптический прицел следует установить в положение A/A, что стабилизирует сетку на линии визирования радара в окне. Метки крена служат для предоставления пилоту информации об относительном крене в условиях полёта по приборам (погода или ночное время), а правая сторона круга диаметром 50 мил (внешняя) работает как шкала дальности при захвате цели радаром, отображая дальность от 20 000 футов (вверху) до 3000 футов (внизу), при этом 12 000 футов обозначены в положении 3 часа. Также можно использовать AIM-7, используя режим ACM, нажав сначала кнопку Cage, а затем кнопку CAA, чтобы выполнить захват.

Когда захват цели радаром достигнут с выбранной AIM-7, пара стробов окружает захваченную цель по азимуту. Обозначенные как Rmax и Rmax 2, они представляют собой эффективные дальности против цели, летящей с перегрузкой 1 G (Rmax), и маневрирующей цели с высокой скоростью в зависимости от высоты (Rmax 2, представляющий 8 G до 20 000 футов, 6 G до 35 000 футов и 4 G выше 35 000 футов). Когда ракета запущена, строб Rmax 2 падает в нижнюю часть дисплея и начинает двигаться вверх к захваченной цели; это работает как таймер полёта ракеты. Когда таймер достигает захваченной цели, можно предположить, что ракета прибыла. Дисплей не показывает Rmin, а вместо этого переключается на предупреждение Break X, наложенное на радиолокационное изображение, если Rmin достигнут для запуска Sparrow.

Перед атакой необходимо решить, будут ли блокировки ракет включены или выключены. Блокировки предотвращают выстрел AIM-7, когда она находится за пределами эффективных параметров стрельбы, а именно: ракета в пределах дальности (горит индикатор IN RANGE), точка прицеливания цели находится внутри круга ASE (допустимая ошибка наведения) на радиолокационном дисплее, а режим отображения радара не VI (режим Vis-Ident).
При включённых блокировках, если выполнено любое из трёх вышеупомянутых ограничений - цель вне досягаемости, точка прицеливания вне ASE или радар оставлен в VI, - нажатие на спусковой крючок не приведёт к запуску ракеты. При выключенных блокировках AIM-7 будет запущена независимо от состояния трёх блокировок.
Когда параметры выполнены, индикаторы SHOOT загорятся. Эти индикаторы, расположенные в обеих кабинах, подтверждают состояние хороших условий запуска для AIM-7. В случае, если цель входит в ситуацию помех главного луча (угол между 81 и 99 градусами и ниже 5 градусов над горизонтом), индикаторы погаснут, даже если требования блокировки выполнены. Следует использовать манёвр, чтобы вывести цель из этой области перед запуском.
В момент атаки ракеты AIM-7 выбираются с помощью мизинцевого переключателя на внешнем (левом) рычаге РУД, выбирая переднее положение. Это зажжёт индикатор RADAR на панели индикатора на лобовом стекле.
Перед использованием AIM-7E Sparrow следует выдержать задержку в четыре секунды, если главный переключатель включения установлен в положение ON до захвата цели радаром, или задержку в две секунды, если главный переключатель включения установлен в положение ON после захвата цели радаром. Это связано с периодом установки скоростного диапазона ракеты. С AIM-7F эта задержка сокращается до двух секунд при включении главного переключателя включения до захвата цели или сразу после установки главного переключателя включения в положение On, если захват цели был достигнут первым. Если эти задержки не будут соблюдены, ракета может не захватить цель из-за неправильного ввода доплеровского сдвига цели.
Когда цель находится в пределах параметров или блокировки отключены, нажатие на спусковой крючок запускает AIM-7. Вторую AIM-7 можно немедленно запустить по той же цели, если это необходимо, отпустив, а затем снова нажав на спусковой крючок - удерживая его во втором положении.
Последовательность запуска

Последовательность запуска ракеты AIM-7 (в ориентации самолёта):
- Левая передняя станция
- Правая передняя станция
- Левая задняя станция
- Правая задняя станция
В случае, если боеприпас или бак на центральной линии препятствует запуску передней ракеты, загорится индикатор CL TK lamp. Задние ракеты всё ещё можно запускать, а передние ракеты можно запускать, если центральный бак сброшен или MER сброшен. Индикатор также загорается, если BRU-5/A находится в центральном положении; однако в этом состоянии можно запустить ракету. Aero-27 препятствует любому запуску, даже если боеприпас сброшен.
Варианты
Для этого варианта Фантома доступны следующие варианты семейства AIM-7:
| Тип | Описание |
|---|---|
| 7E | Вариант E был ранней версией ракеты Sparrow, поступившей на вооружение в 1960-х годах, которая использует пропорциональную навигацию и полуактивное радиолокационное наведение. |
| 7E2 | Были внесены изменения для повышения эффективности в ближнем бою за счёт снижения сохранения энергии в боях на большей дальности. Время срабатывания взрывателя также сокращено, что позволяет правильно срабатывать взрывателю в ближнем бою. |
| 7F | Sparrow F была модернизирована, чтобы стать твердотельной, иметь более мощный двухступенчатый двигатель (разгонный и маршевый) и улучшенную электронику, включая возможность сопровождения целей через помехи главного лепестка и линии высоты. Эти изменения также позволяют головке самонаведения обнаруживать цели с большей дальности и с повышенной устойчивостью к средствам противодействия, а также отслеживать цели с помощью сигналов наведения как непрерывных волн, так и импульсного доплеровского сдвига, в отличие от E, E2 и E3, которые могут наводиться только на непрерывные волны. |
| 7M | M была первой Sparrow с обратной моноимпульсной модуляцией, обеспечивающей повышенную точность отслеживания, она также имеет улучшенные характеристики двигателя и электроники, включая улучшенное подавление помех и средств противодействия. M, как и все Sparrow, также может наводиться с помощью непрерывных волн, с пониженной точностью отслеживания. |
Ниже приведено очень простое сравнительное описание характеристик каждой Sparrow в некоторых общих областях, где 🟢 означает хорошо, 🟨 - удовлетворительно, а 🔺 - плохо.
| Тип | Головка самонаведения | Дальность | Ближний бой | Подавление помех/средств противодействия |
|---|---|---|---|---|
| AIM-7E | 🔺 | 🟨 | 🔺 | 🔺 |
| AIM-7E2 | 🔺 | 🔺 | 🟢 | 🔺 |
| AIM-7F | 🟨 | 🟢 | 🟢 | 🟨 |
| AIM-7M | 🟢 | 🟢 | 🟢 | 🟢 |
💡 Технически E2 имеет ту же максимальную дальность, что и E. Однако из-за её манёвренности эта дальность уменьшается для всего, кроме прямого выстрела.
AIM-9 Sidewinder

Ракета ближнего действия с инфракрасным наведением AIM-9 Sidewinder, поступившая на вооружение ВМС США в 1956 году и, наконец, принятая ВВС США в 1964 году, считается большинством первой в мире по-настоящему эффективной управляемой ракетой "воздух-воздух". Начиная с AIM-9B и сохраняя совместимость с AIM-9M на вооружении США, Sidewinder обеспечила Phantom II мощную систему оружия ближнего боя против быстро маневрирующих противников.
Применение
AIM-9 можно использовать как с захватом цели радаром, так и без него, и её запуск осуществляется путём установки главного переключателя включения в положение ON и выбора центрального положения мизинцевого переключателя на РУДе для Heat. Индикатор HEAT на индикаторе на лобовом стекле загорится, а доступные ракеты AIM-9 загорятся на панели состояния ракет. Оптический прицел следует перевести в положение A/A, и сетка стабилизируется на линии визирования радара, которая является местоположением линии визирования для Sidewinder на направляющих.
Если захват цели радаром достигнут, прицел отобразит шкалу дальности на правой стороне, как описано ранее, с 20 000 футов, обозначенными вверху, и дальностью 3000 футов, обозначенной внизу. При захвате цели радаром радар отобразит пару стробов, обозначающих Rmax и Rmin для Sidewinder против цели в текущих условиях запуска.

💡 AIM-9 не получает передачу наведения от APQ-120, как на более поздних самолётах, для направления угла обзора головки самонаведения. Вместо этого круг ASE отображает точку прицеливания на цель, чтобы подвести её к RBL.
Центрирование точки прицеливания в ASE выравнивает цель с RBL, что позволяет головке самонаведения выбранной AIM-9 быстро захватить цель. Как только тон ракеты изменится, сигнализируя о захвате, пилот может нажать и удерживать кнопку ARR на ручке управления, чтобы разрешить самонаведение Sidewinder (разблокировка головки самонаведения); эта функция позволяет головке самонаведения поддерживать захват цели (обозначается изменённым звуковым тоном), позволяя при этом маневрировать самолётом для достижения лучшего угла или дальности перед запуском, если позволяет ситуация. Объём манёвра, доступный для данного типа Sidewinder, зависит от варианта и должен быть учтён перед выбором.
Последовательность запуска

Как только желаемое решение для стрельбы будет достигнуто, AIM-9 запускается с помощью спускового крючка.
Последовательность запуска AIM-9:
- Левая внешняя
- Правая внешняя
- Левая внутренняя
- Правая внутренняя
Варианты
Для этого варианта Фантома доступны следующие варианты семейства AIM-9:
| Вариант | Описание |
|---|---|
| B | Первая серийная версия семейства Sidewinder, поступившая на вооружение в 1950-х годах. Она использовала инфракрасную головку самонаведения для захвата и отслеживания цели, что делало её ракетой с тепловым наведением. |
| J | Имеет улучшенные характеристики наведения и лётные характеристики. Она сохранила инфракрасную головку самонаведения, но имела повышенную чувствительность и лучшую устойчивость к средствам противодействия. |
| JULI | Вариант AIM-9J, разработанный Германией. Он имел модификации для удовлетворения конкретных эксплуатационных требований. |
| L | Значительная модернизация с улучшенными возможностями инфракрасного наведения, позволяющая лучше различать цели. Она представила всеракурсное наведение, то есть она могла поражать цели с любого угла, а не только сзади. |
| M | Улучшенные возможности наведения и противодействия средствам противодействия. Она имела повышенную маневренность и улучшенные алгоритмы отслеживания цели, что делало её более эффективной в боевых ситуациях. |
| P | Разработана для экспорта и используется различными странами. Она имела улучшения по сравнению с более ранними моделями с точки зрения надёжности и характеристик головки самонаведения. |
| P-3 | Улучшает версию P за счёт использования двигателя с уменьшенным дымообразованием и улучшенной системы наведения. База шведской ракеты RB-24J. |
| P-5 | Ещё больше улучшает возможности противодействия средствам противодействия, как и в версии M. База шведской ракеты RB-24L. |
| Captive M | Нефункциональный вариант, используемый для учебных и испытательных целей. |
Ниже приведено простое сравнительное описание характеристик каждой Sidewinder в некоторых общих областях, где 🟢 означает хорошо, 🟨 - удовлетворительно, а 🔺 - плохо.
| Тип | Тон захвата | Разблокировка | Аспект | Маневренность | Устойчивость к средствам противодействия | Двигатель |
|---|---|---|---|---|---|---|
| B | 🔺 | 🔺 | Задний | 🔺 | 🔺 | 🔺 |
| J | 🔺 | 🟢 | Задний | 🟨 | 🟨 | 🔺 |
| JULI | 🟢 | 🟢 | Всеракурсный | 🟨 | 🟢 | 🟨 |
| L | 🟢 | 🟢 | Всеракурсный | 🟢 | 🟢 | 🟢 |
| M | 🟢 | 🟢 | Всеракурсный | 🟢 | 🟢 | 🟢 |
| P | 🔺 | 🟢 | Задний | 🟨 | 🟨 | 🔺 |
| P-3 | 🔺 | 🟢 | Задний | 🟨 | 🟨 | 🟨 |
| P-5 | 🟢 | 🟢 | Всеракурсный | 🟨 | 🟢 | 🟨 |
| Captive M | 🟢 | 🟢 | Всеракурсный | ❌ | 🟢 | ❌ |
Некоторые варианты имеют нулевую головку самонаведения. Эти ракеты не издают тона, когда полностью выровнены с целью. Это может привести к путанице, заставляя думать, что ракета не отслеживает цель, в то время как она фактически идеально захвачена.
AIM-9B не может разблокироваться, чтобы динамически отслеживать цель, которая не находится на её линии визирования.
Smokewinders
Для авиашоу самолёт также может быть оснащён дымогенераторами, установленными внутри макетов Sidewinder, называемых Smokewinder.

Генератор включает или выключает дым при получении сигнала сброса оружия. То есть выберите HEAT, MASTER ARM, а затем нажмите на спусковой крючок.
Доступные цвета дыма: красный, зелёный, синий, белый, жёлтый и оранжевый.
Режимы ACM
Режим CAGE

В случае, если необходимо применить AIM-7, AIM-9, или M61A1 must be employed против воздушной цели с прицелом в режиме A/G (например, самолёт атакован вражескими самолётами), сетку оптического прицела можно немедленно переместить на линию визирования радара с помощью кнопки Cage, расположенной на внутренней (правой) рукоятке РУД. Режим CAGE переводит радар в режим BST с дальностью действия пять миль и коротким импульсом, а также устанавливает цепь стрельбы для текущего выбранного оружия "воздух-воздух" относительно мизинцевого переключателя. Для оптического прицела команда активирует соответствующие функции отслеживания по углу места и азимуту, отметки крена и дальности сетки для выбранного оружия, без необходимости убирать руку с РУД или РУС, чтобы переключить режим прицела или функции панели управления оружием.
Если условие отслеживания существует до нажатия кнопки Cage, а мизинцевый переключатель находится в положении Radar или Heat, захват срывается при нажатии кнопки, а антенна совмещается с линией визирования при отпускании. Если мизинцевый переключатель находится в положении Gun, захват не срывается.
Выйти из режима CAGE можно из любой кабины, кратковременно установив ручку выбора оружия в кабине пилота в положение B или нажав кнопку "воздух-воздух" на панели задней кабины WSO. Если пилот оставит ручку выбора оружия в положении B, это не помешает последующему входу в режим CAGE.

Режим автоматического захвата (CAA)

После входа в режим CAGE радар можно перевести в режим автоматического захвата с помощью кнопки управления носовой стойкой шасси. В режиме CAA радар переходит в схему сканирования с вертикальной ориентацией высотой 78 градусов и шириной 15 градусов. Фактическая возможность захвата радаром в пределах этой схемы сканирования составляет от +45 градусов над линией горизонта (линия фюзеляжа) до -9 градусов ниже линии горизонта (линия фюзеляжа) из-за ограничения программного обеспечения APQ. В случае, если радар обнаружит подходящую цель в пределах объёма сканирования, цель будет захвачена. Если экипаж обнаружит, что захваченная цель не та, которую нужно было захватить, можно нажать кнопку управления носовой стойкой шасси на любой ручке управления, чтобы вернуть радар обратно в схему поиска.
В режиме CAA схему поиска радара можно смещать влево и вправо с помощью мизинцевого переключателя.
| Выбор | Фокус |
|---|---|
| Guns | Фокус радара влево |
| Heat | Фокус радара по центру |
| Radar | Фокус радара вправо |
Чтобы выйти из CAA, пилот может выбрать положение B на ручке выбора оружия, или WSO может нажать кнопку "воздух-воздух". Если на момент выхода из режима существует захват радара, он будет сохранён.
Оружие "воздух-земля"
Возможности F-4E Phantom II "воздух-земля" отличаются точностью и универсальностью. Вооружённый разнообразными боеприпасами, от традиционных неуправляемых бомбдо сложных высокоточных ракет, Phantom II способен выполнять различные задачи по атаке наземных целей.
Неотъемлемой частью арсенала F-4E "воздух-земля" являются управляемые боеприпасы, используемые для высокоточных ударов. Бомбы с лазерным наведением (LGB) и другие высокоточные боеприпасы позволяют Phantom II поражать высокоценные и стратегически важные цели с беспрецедентной точностью.

Ракеты
Среди смертоносного вооружения Фантома II - ракеты AGM-65 Maverick, AGM-45 Shrike и AGM-12 Bullpup, каждая из которых играет свою роль в способности самолёта поражать наземные цели и нейтрализовать угрозы противника.
AGM-65 Maverick, высокоточная ракета "воздух-земля", использует свои универсальные системы наведения, включая электрооптические и инфракрасные головки самонаведения, что позволяет пилотам поражать различные наземные угрозы.
AGM-45 Shrike играет специализированную роль в подавлении противовоздушной обороны противника (SEAD). Shrike, предназначенная для поиска и нейтрализации вражеских радиолокационных установок, представляет собой противорадиолокационную ракету, которая нацелена на излучающие радар угрозы.
AGM-12 Bullpup это управляемая по радио ракета "воздух-земля" ближнего действия, которой экипаж может управлять вручную, что позволяет им поражать наземные угрозы.

Противорадиолокационная ракета AGM-45 Shrike

Созданная на базе Sparrow AGM-45 Shrike - это ранняя попытка создания противорадиолокационной ракеты для подавления противовоздушной обороны противника (SEAD). Объединив настроенную по частоте головку самонаведения с ракетным корпусом AIM-7, Shrike предоставила ВМС США, а затем и ВВС США, возможность поражения вражеских радаров ЗРК на расстоянии. Хотя номинально эффективная, на практике Shrike была сложным в использовании оружием, учитывая её ограниченную дальность, низкую скорость и основной режим атаки, который оставлял запускающий самолёт в пределах зоны поражения большинства систем противовоздушной обороны противника. Ещё больше снижала её эффективность небольшая боевая часть, что означало, что в большинстве случаев повреждалась только сама излучающая антенна, а не транспортное средство, на котором она была установлена.
Хотя Shrike была ограничена в большинстве аспектов, за время своей службы она получила ряд модернизаций, прослужив с середины 60-х годов во Вьетнаме до окончания войны в Персидском заливе, за счёт улучшенных двигателей и дополнительных обновлений головки самонаведения для более поздних систем ЗРК. Shrike использовалась двумя иностранными пользователями - ВВС Израиля, которые также модифицировали её для наземного запуска, и тайно Королевскими ВВС во время Фолклендской войны.
Варианты
На этой версии Фантома можно установить только версию A.
Применение
AGM-45 имеет три отдельных режима запуска: (WRCS) AGM-45, (LABS) LOFT и (WRCS) DIRECT.
Базовая настройка кабины
Перед использованием любой AGM-45 Shrike пилот должен установить несколько параметров в кабине:
- Выберите станцию для Shrike, которую вы хотите использовать, с помощью кнопок выбора станции.
- Выберите ARM на ручке выбора оружия.
- Выберите один из трёх доступных режимов Shrike с помощью ручки режима доставки.
- (необязательно) Включите директорное управление для наведения стрелками ADI.
- (необязательно) Переведите LCOSS в режим A/G.
- Включите MASTER ARM on
AGM-45 (режим WRCS)
Этот режим, используемый только с AGM-45 совместно с WRCS, является основным средством применения Shrike. Режим основан на профиле атаки с большой высоты и зависит от запрограммированной зоны поражения AGM-45, хранящейся в WRCS. Этот профиль, в сочетании с текущей информацией о состоянии самолёта от INS и сигналом, предоставляемым приёмником в ракете, - обнаружившим излучатель типа, на который она настроена, - определяет траекторию полёта и зону сброса для оптимальной вероятности достижения ракетой цели.
При выборе режима WRCS AGM-45 запуск инициируется путём включения кнопки выбора станции для точки подвески, несущей ракету AGM-45. Это активирует приёмник ракеты, и при захвате излучателя предоставит вышеупомянутый информационный сигнал на WRCS. WSO должен ввести значение высоты цели на панель управления компьютером, если это необходимо, используя среднее значение для текущей области цели, и, если нужно запустить несколько ракет, настройку времени упреждения сброса. WRCS получает как данные от ракеты относительно угла обзора ракеты, так и скорректированный угол обзора от INS; выбор того, какие данные использовать, осуществляется с помощью переключателя TGT/MSL Rej, который в большинстве случаев следует оставлять в положении DF REJ.
Имея угол обзора и предполагаемую дальность, WRCS предоставит инструкции по наведению с помощью стрелок на ADI. После ориентирования по углу пикирования дальность до цели по горизонтали будет отображаться на HSI и BDHI, при условии, что для режима навигации выбрано положение INS.
Когда ориентация самолёта правильная, а стрелки ADI отцентрированы, как только самолёт окажется в пределах дальности действия ракеты, один из индикаторов загорится на основе обнаруженной дальности до цели, чтобы проинструктировать пилота о необходимом манёвре сброса - пикирование, горизонтальный полёт или набор высоты. В этот момент пилот может нажать и удерживать кнопку сброса бомбы, чтобы начать атаку. Как только дальность сброса будет достигнута в заданном профиле, ракета будет запущена.
💡 Особое внимание следует обратить на важность поддержания стрелок ADI отцентрированными, особенно вертикального соотношения азимута. Поскольку ориентация самой ракеты при установке на крыле может привести к смещению её приёмника, когда самолёт находится в крене, подготовка к атаке может потребовать повторных регулировок с выравниванием крыльев каждые несколько секунд, чтобы убедиться, что самолёт направлен на излучатель.
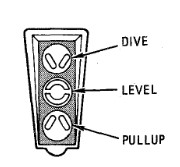 Команды AGM-45 Shrike в режиме WRCS
Команды AGM-45 Shrike в режиме WRCS
Набор высоты
Индикатор команды набора высоты указывает, что самолёт находится на определённой дальности, где необходимо выполнить манёвр набора высоты, чтобы получить сигнал сброса. После нажатия кнопки сброса бомбы и при горящем индикаторе набора высоты инструкция набора высоты является указанием для пилота начать плавный поворот обратно к горизонту и, при желании, продолжить плавный набор высоты, пока не будут выполнены требования по дальности и ракета не будет запущена. Пилот может либо выровнять самолёт почти до горизонтального положения и остановиться, либо продолжить набор высоты под малым углом. Когда самолёт находится примерно в 5 секундах от сброса, загорится индикатор горизонтального полёта, указывая пилоту на необходимость поддержания текущей ориентации до тех пор, пока Shrike не отделится.
Пикирование
Команда пикирования в режиме WRCS возникает только тогда, когда атака начинается очень близко к цели. Ситуацию и близость к установке ЗРК необходимо учитывать до начала атаки с помощью кнопки сброса бомбы, так как любой ответ батареи, скорее всего, прибудет до того, как ракета сможет потенциально уничтожить излучатель. За командой пикирования, после её выполнения, последует индикатор горизонтального полёта, как только запуск ракеты станет неизбежным.
Горизонтальный полёт
Инструкция горизонтального полёта - это скорее подтверждение предстоящего запуска, чем директива. В зависимости от начальной настройки атаки сигнал горизонтального полёта может появиться сразу или вскоре после одной из двух других инструкций. С этого момента просто требуется, чтобы пилот поддерживал текущее состояние для обеспечения наилучших шансов на успех ракеты.
Применение WRCS AGM-45
💡 Режим WRCS в настоящее время находится в разработке, и применение будет описано, как только он будет готов.
Лофтирование
Профиль атаки Shrike Loft похож на атаку с лофтированием бомб, используя таблицы поиска оружия для определения подходящей дальности до IP для сброса, необходимый угол сброса и время от IP до набора высоты определяется таблицей поиска скорости относительно дальности до IP для сброса.
Одним из ключевых отличий режима Loft от режимов применения WRCS для Shrike является преимущественное использование режима NORM вместо DF REJ; это делает приёмник ракеты основным источником команд наведения по азимуту на ADI вместо INS. Вертикальная стрелка ADI появится, когда положение AGM-45 выбрано на переключателе пьедестала, который находится в положении NORM.
Атака выполняется как профиль бомбометания с лофтированием; Фантом пролетает над IP на предполагаемой высоте и воздушной скорости, при этом кнопка сброса бомбы удерживается нажатой с момента пролёта. Запускается таймер обратного отсчёта, появляется горизонтальная полоса ADI для поддержания горизонтального полёта, и загорается индикатор набора высоты. Когда таймер набора высоты завершит отсчёт, индикатор набора высоты погаснет, сетка прицела погаснет, а горизонтальная полоса ADI переместится, чтобы отобразить перегрузку, как обычно для манёвра набора высоты; правильный профиль будет удерживать обе полосы ADI отцентрированными. Когда самолёт достигнет запрограммированного угла сброса, ракета будет запущена. Как только запуск произойдёт, индикатор набора высоты и сетка прицела снова загорятся, а горизонтальная полоса ADI уберётся.
 Пример бомбометания Loft, процедура остаётся такой же для AGM-45 Shrike
Пример бомбометания Loft, процедура остаётся такой же для AGM-45 Shrike
Применение LABS Loft
Этот режим работает точно так же, как и для бомб, поэтому необходимо предварительное планирование. Выберите IP, рассчитайте таймеры и летите по тому же профилю атаки, что и для бомбометания Loft. Обратите внимание, что в этом режиме головка самонаведения Loft AGM-45 Shrike должна ощущать перепад давления 1 бар и барометрическую высоту более 18 000 футов, чтобы включиться и начать поиск.
Режим Direct
Применение AGM-45 в режиме Direct зависит от того, знает ли экипаж точное местоположение излучателя ЗРК цели; хотя его можно использовать в качестве запасного метода в случае отказа системы WRCS, необходимость угла пикирования не менее 10 градусов на цель для успешной доставки требует возможности планирования атаки на определённую точку на земле.
Чтобы использовать оружие в режиме Direct, экипаж подтверждает приём звука излучателя и начинает пикирование, чтобы центрировать стрелки ADI на цели. Затем экипаж должен проверить таблицу пикирования на предмет угла и высоты над уровнем земли, и пилот должен маневрировать в эту ориентацию, поддерживая отцентрированную вертикальную стрелку ADI. С этого момента кнопка сброса бомбы нажимается и удерживается до тех пор, пока Shrike не будет запущена.
Применение WRCS Direct
Для прямого применения всё, что нужно сделать пилоту, - это центрировать стрелки на ADI и нажать кнопку сброса бомбы. Shrike запустится в течение одной секунды после нажатия кнопки сброса бомбы. Имейте в виду, что Shrike будет иметь наименьшую дальность действия в режиме Direct и её следует запускать очень близко к цели. Рекомендуется угол пикирования 20 градусов или более.
Головки самонаведения
AGM-45 имеет 10 головок самонаведения, каждая из которых нацелена на определённую радиочастоту излучателя, на выбор. Это означает, что перед полётом требуется некоторая подготовка, чтобы быть готовым к эффективному поражению угроз. Ниже приведены таблицы головок самонаведения, чтобы вы могли соответствующим образом планировать свои миссии.
💡 Данные о головках самонаведения были обновлены в последний раз для версии 2.9.7.59263.
Таблица пределов радиочастот головок самонаведения
| Головка самонаведения | Основные цели | Нижний предел радиочастоты (ГГц) | Верхний предел радиочастоты (ГГц) |
|---|---|---|---|
| Mk 22 | Fan Song (SA-2 TR) | 4.8 | 5.2 |
| Mk 23 | Fan Song, Fire Can, Tin Shield | 2 | 4 |
| Mk 24 Mod 5 | Fire Can, Tin Shield | 2.65 | 3.15 |
| Mk 24 Mod 34 | Fire Can, Tin Shield | 2.5 | 3.5 |
| Mk 25 | Fan Song (SA-2 TR) | 4 | 6 |
| Mk 36 | Low Blow (SA-3 TR) | 7.9 | 9.6 |
| Mk 37 | Flat Face | 0.8 | 1 |
| Mk 49 Mod 0 | Low Blow, Straight Flush (SA-6 STR) | 6 | 10 |
| Mk 49 Mod 1 | Low Blow, Straight Flush (SA-6 STR) | 6 | 10 |
| Mk 50 | Various | 2 | 6 |
Общий ключ:
- SR: радар поиска
- TR: радар отслеживания
- STR: радар поиска и отслеживания
- RF: дальномер
Наземные угрозы
Радары наземных систем ЗРК и ДРЛО стран Варшавского договора
| Seeker | SA-2 | SA-3 | SA-5 | SA-6 | SA-8 | SA-10 | SA-11 | SA-13 | SA-15 | SA-19 | EWR |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mk 22 | TR/RF | TR | SR/TR | TR | SR/TR | DE | |||||
| Mk 23 | TR/RF | TS | TS/BB | TR | SR/TR | ||||||
| Mk 24 Mod 5 | TR/RF | TS | TS | TR | SR/TR | ||||||
| Mk 24 Mod 34 | TR/RF | TS | TS | TR | |||||||
| Mk 25 | TR/RF | TR | SR/TR | TR | SR/TR | DE | |||||
| Mk 36 | TR/RF | TR | TR | TR | CS/TR | SR/TR | TR | ||||
| Mk 37 | FF/RF | FF | FF/TR | TR | |||||||
| Mk 49 Mod 0 | TR/RF | TR | TR | TR | STR | CS | SR/TR | TR | |||
| Mk 49 Mod 1 | TR/RF | TR | TR | TR | STR | CS | SR/TR | TR | |||
| Mk 50 | TR/RF | TS/TR | TS/BB | TR | SR/TR | DE |
💡 Все SA-2/3/5 могут использовать один и тот же радар поиска Flat Face, при этом SA-5 имеет возможность использовать Tin Shield в качестве радара поиска.
- BB: Big Bird (радар поиска SA-10)
- CS: Clam Shell (радар поиска SA-10)
- DE: Dog Ear
- FF: Flat Face (радар поиска SA-2/3/5)
- TS: Tin Shield (радар поиска SA-5/10)
Наземные угрозы ЗРК Китая
| Головка самонаведения | CH-SA-4 (HQ-7) |
|---|---|
| Mk 22 | |
| Mk 23 | |
| Mk 24 Mod 5 | |
| Mk 24 Mod 34 | |
| Mk 25 | |
| Mk 36 | SR/TR |
| Mk 37 | |
| Mk 49 Mod 0 | SR/TR |
| Mk 49 Mod 1 | SR/TR |
| Mk 50 |
Комбинированные радары зенитной артиллерии (AAA) НАТО и стран Варшавского договора
| Головка самонаведения | «Шилка» | Fire Can | «Гепард» | M163 VADS | C-RAM |
|---|---|---|---|---|---|
| Mk 22 | TR | ||||
| Mk 23 | TR | SR/TR | |||
| Mk 24 Mod 5 | TR | SR/TR | |||
| Mk 24 Mod 34 | TR | ||||
| Mk 25 | TR | ||||
| Mk 36 | TR | ||||
| Mk 37 | TR | ||||
| Mk 49 Mod 0 | TR | ||||
| Mk 49 Mod 1 | TR | ||||
| Mk 50 | TR | TR |
Радары наземных систем ЗРК НАТО и ДРЛО
| Головка самонаведения | «Хок» | «Рапира» | «Рапира» | «Роланд» | NASAMS |
|---|---|---|---|---|---|
| Mk 22 | STR | TR | |||
| Mk 23 | TR | ||||
| Mk 24 Mod 5 | TR | ||||
| Mk 24 Mod 34 | TR | ||||
| Mk 25 | STR | TR | |||
| Mk 36 | TR | TR | TR | SR | |
| Mk 37 | SR | TR | |||
| Mk 49 Mod 0 | TR | ||||
| Mk 49 Mod 1 | TR | ||||
| Mk 50 | STR | TR |
Морские угрозы
💡 Указаны классы кораблей, а не отдельные корабли, где корабли идентичны.
Советские морские угрозы
| Головка самонаведения | «Киров» | «Слава» | «Кузнецов» | «Молния» | «Гриша» | «Кривак» | «Неустрашимый» | «Ропуча» |
|---|---|---|---|---|---|---|---|---|
| Mk 22 | TR | TR | TR | TR | TR | TR | ||
| Mk 23 | SR/TR | SR/TR | SR/TR | SR/TR | TR | TR | SR/TR | |
| Mk 24 Mod 5 | SR/TR | TR | SR/TR | SR/TR | TR | TR | SR/TR | |
| Mk 24 Mod 34 | TR | TR | TR | TR | TR | TR | ||
| Mk 25 | TR | TR | TR | TR | TR | TR | ||
| Mk 36 | SR/TR | SR/TR | SR/TR | SR/TR | TR | TR | SR/TR | |
| Mk 37 | TR | TR | TR | TR | TR | TR | ||
| Mk 49 Mod 0 | TR | TR | TR | SR/TR | SR/TR | TR | ||
| Mk 49 Mod 1 | TR | TR | TR | SR/TR | SR/TR | TR | ||
| Mk 50 | SR/TR | SR/TR | SR/TR | SR/TR | TR | TR | SR/TR |
Морские угрозы Китая
| Головка самонаведения | Type 052B | Type 052C | Type 054A | Type 071 |
|---|---|---|---|---|
| Mk 22 | TR | TR | ||
| Mk 23 | SR/TR | SR/TR | SR/TR | |
| Mk 24 Mod 5 | TR | SR/TR | TR | |
| Mk 24 Mod 34 | TR | TR | ||
| Mk 25 | TR | TR | ||
| Mk 36 | SR/TR | SR/TR | SR/TR | |
| Mk 37 | TR | TR | ||
| Mk 49 Mod 0 | TR | TR | ||
| Mk 49 Mod 1 | TR | TR | ||
| Mk 50 | SR/TR | SR/TR | SR/TR |
Морские угрозы США
| Головка самонаведения | «Тикондерога» | «Арли Бёрк» | «Оливер Хазард Перри» | «Форрестол» | «Нимиц» | «Тарава» |
|---|---|---|---|---|---|---|
| Mk 22 | TR | TR | ||||
| Mk 23 | TR | TR | ||||
| Mk 24 Mod 5 | TR | TR | ||||
| Mk 24 Mod 34 | TR | TR | ||||
| Mk 25 | TR | TR | ||||
| Mk 36 | TR | TR | TR | TR | ||
| Mk 37 | SR/TR | SR/TR | SR/TR | TR | ||
| Mk 49 Mod 0 | TR | TR | ||||
| Mk 49 Mod 1 | TR | TR | ||||
| Mk 50 | TR | TR |
Морские угрозы Великобритании
| Головка самонаведения | «Леандр» | «Касл» | «Инвинсибл» |
|---|---|---|---|
| Mk 22 | TR | ||
| Mk 23 | TR | ||
| Mk 24 Mod 5 | TR | ||
| Mk 24 Mod 34 | TR | ||
| Mk 25 | TR | ||
| Mk 36 | TR | ||
| Mk 37 | TR | ||
| Mk 49 Mod 0 | TR | ||
| Mk 49 Mod 1 | TR | ||
| Mk 50 | TR |
Другие морские угрозы
| Головка самонаведения | «Вейнтисинко де Майо» | «Конделл» | «Конделл» |
|---|---|---|---|
| Mk 22 | |||
| Mk 23 | SR/TR | ||
| Mk 24 Mod 5 | |||
| Mk 24 Mod 34 | |||
| Mk 25 | |||
| Mk 36 | |||
| Mk 37 | |||
| Mk 49 Mod 0 | |||
| Mk 49 Mod 1 | |||
| Mk 50 | SR/TR |
AGM-65 Maverick

Поступившая на вооружение в 1972 году ракета "воздух-поверхность" AGM-65 предоставила Phantom II дальнобойное оружие прямого огня, способное уничтожать бронетехнику, мотопехоту и другие цели с электрооптической, а позже - инфракрасной, точностью.
F-4E мог нести до шести ракет между двумя внутренними пилонами крыла. AGM-65 Maverick имеет максимальную дальность действия около 12 морских миль.
Применение Maverick осуществляется обеими кабинами, причём пилот отвечает за выбор боеприпасов и режима, а также за первоначальное размещение головки самонаведения. С момента стабилизации головки самонаведения на предполагаемой области цели любой член экипажа может навести её на конечную цель с заданным контрастом.
Варианты
Доступные варианты:
| Вариант | Боевая часть | Поле зрения | Описание |
|---|---|---|---|
| A | 462 фунта | Широкое | С телевизионным наведением |
| B | 462 фунта | узкое | С телевизионным наведением |
| D | 485 фунта | Широкое и узкое | С инфракрасным наведением |
| G | 675 фунта | Широкое и узкое | С инфракрасным наведением, оптимизирована для более крупных целей |
Применение
Чтобы использовать Maverick любого варианта, пилот сначала нажимает соответствующие кнопки выбора станции и устанавливает главный переключатель включения в положение On. Затем пилот должен выбрать Direct на ручке режима доставки и положение TV на ручке выбора оружия.
При выборе TV запускается 3-минутная последовательность прогрева гироскопа ракеты; рекомендуется запустить секундомер слева от панели управления многозарядным оружием, чтобы не нарушить эту последовательность. После завершения прогрева загорятся нижние жёлтые индикаторы ARM на кнопках выбора станции. Несоблюдение этого цикла гироскопа может привести к повреждению блока наведения ракет на борту. Во время этого периода прогрева полезно установить оптический прицел в режим A/G и ввести снижение 45 мил, чтобы выравнивание прицела соответствовало головке самонаведения ракеты. Таким образом, пилот может навести визирную марку на цель, и она будет находиться в поле зрения оружия.
| Нет захвата | Захват цели | Узкий обзор и захват |
|---|---|---|
 |  | 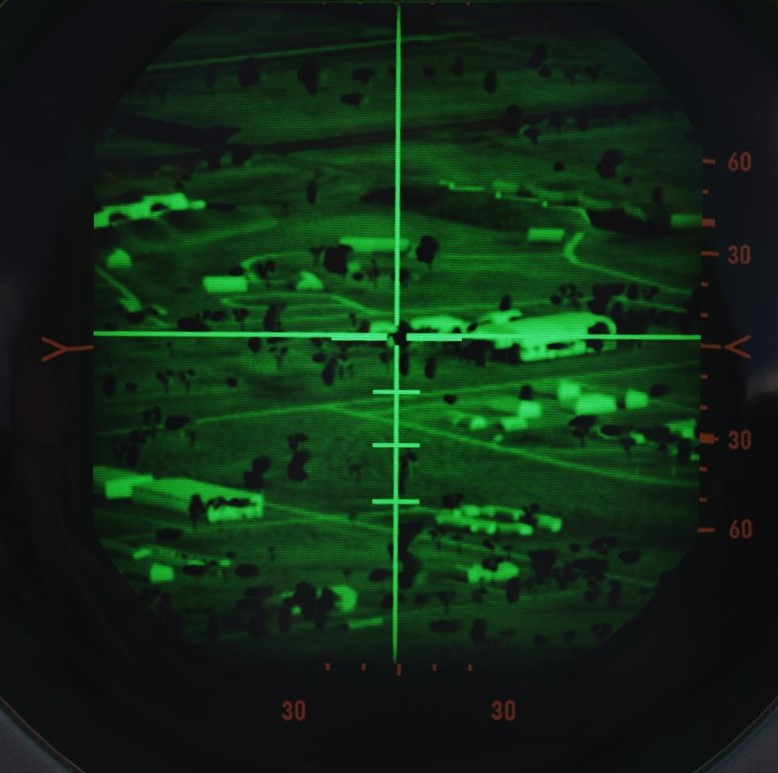 |
После завершения прогрева экипаж может активировать свои дисплеи для просмотра видеосигнала с головки самонаведения; пилот выбирает положение TV на переключателе выбора дисплея индикатора на панели пьедестала, а WSO устанавливает ручку режима дисплея DSCG в положение TV, а переключатель выбора видеосигнала в положение WEAPON вместо ASQ.
💡 Чтобы запустить подачу телевизионного сигнала, необходимо нажать на спусковой крючок ручки управления, иначе экран останется пустым.
При активированных дисплеях пилот маневрирует самолётом, чтобы разместить сетку прицела над областью цели, и любой член экипажа может затем нажать на спусковой крючок своей ручки управления, чтобы запустить видеосигнал. При активном видеосигнале управление головкой самонаведения ракеты осуществляется членом экипажа, который активировал видеосигнал, следующим образом:
Пилот
Когда визирная марка находится над областью цели, нажатие и удержание кнопки ARR включает поворот головки самонаведения с помощью ручки переднего управления, расположенной внутри от РУД. Как только перекрестие головки самонаведения окажется над предполагаемой целью, отпускание кнопки ARR выполняет захват ракеты по области контраста под перекрестием. Если головка самонаведения ракеты не может захватить правильную цель, захват можно сбросить, снова нажав на спусковой крючок, вернув головку самонаведения ракеты в её положение по линии визирования, а затем повторив попытку захвата с помощью кнопки ARR. Если цель не имеет достаточного контраста по сравнению с окружающим фоном, контраст можно изменить с чёрного на белый или наоборот, используя переключатель контрастности цели на внутренней панели управления двигателем. Если оставить переключатель в положении Auto, головка самонаведения попытается определить наилучший вариант контраста.
Если ракета, похоже, работает неправильно, её можно отклонить до следующей ракеты в последовательности запуска с помощью переключателя TGT/MSL REJ.
Как только захват правильной цели достигнут, ракета запускается с помощью кнопки сброса бомбы. Чтобы запустить захват следующей цели, процесс начинается заново с нажатия на спусковой крючок.
Учитывая вышесказанное для AGM-65A и B с электрооптическим наведением, AGM-65D имеет несколько незначительных изменений в процедуре. Головка самонаведения 65D имеет две настройки поля зрения: широкое и узкое, и первоначальный видеосигнал предоставляется в широкой настройке. В этой настройке квартет L-образных скобок определяет область дисплея, которая будет увеличена при выборе узкого поля зрения. Повторное нажатие на спусковой крючок переключает видеосигнал на узкую настройку, что позволяет более точно выбрать цель.
WSO
WSO выполняет ту же последовательность действий для наведения головки самонаведения и может запустить видеосигнал после подтверждения пилотом местоположения визирной марки, используя спусковой крючок своей ручки управления в задней кабине. С этого момента WSO использует ручку управления антенной для управления размещением головки самонаведения, захватом и, в случае использования AGM-65D, управлением полем зрения. Вместо того, чтобы нажимать и удерживать кнопку ARR для активации поворота, WSO выбирает положение полунажатия спускового крючка, а затем поворачивает головку самонаведения с помощью курсора.
Как только соответствующая цель окажется под перекрестием, захват достигается с помощью команды полного нажатия. Если WSO нужно изменить поле зрения 65D на узкое, последующее нажатие полунажатия сделает это. WSO может изменить режим контраста с помощью переключателя Contrast на панели RWR справа. И, как только захват будет достигнут, WSO может запустить ракету с помощью кнопки запуска ракеты, расположенной на его ручке управления - в том же положении, что и кнопка сброса бомбы на передней ручке.
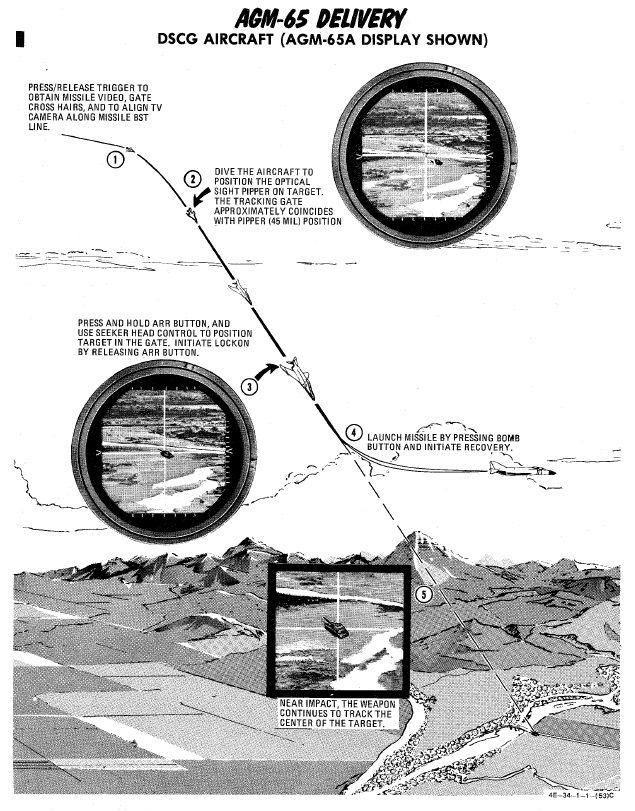
AGM-12 Bullpup

AGM-12, получившая прозвище Bullpup, - это управляемая ракета "воздух-земля" ближнего действия, которой экипаж может управлять вручную.
Команды управления отправляются по радио с помощью нижней антенны UHF Фантома.
Это была первая в своем роде ракета, которая достигла серийного производства и использовалась на вооружении в начале 1960-х годов, пока позже не была вытеснена AGM-62 Walleye.
Варианты
Доступные варианты:
| Вариант | Боевая часть | Описание |
|---|---|---|
| A | 250 фунтов | твердотопливная |
| B | 250 фунтов | жидкотопливная, увеличенная дальность |
| C | 1000 фунтов | жидкотопливная, ещё больше увеличенная дальность |
Применение

Базовая настройка кабины
Перед использованием любой AGM-12 Bullpup пилот должен установить несколько параметров в кабине:
- Выберите станцию для AGM-12 Bullpup с помощью кнопок выбора станции
- Выберите AGM-12 на ручке выбора оружия
- Выберите Direct на ручке режима доставки
- (необязательно) Переведите LCOSS в режим A/G
- Включите MASTER ARM on
Чтобы запустить AGM-12 Bullpup, всё, что осталось сделать, - это навести сетку на цель и нажать и удерживать кнопку сброса бомбы, пока ракета не покинет направляющую. После запуска ракетой можно управлять либо пилотом с помощью мини-ручки рядом с РУД, либо WSO с помощью ручки управления антенной.
Неуправляемые ракеты
2,75-дюймовые неуправляемые авиационные ракеты Mk 4 серии - FFAR

Также известные как Mighty Mouse, 2,75-дюймовые неуправляемые авиационные ракеты Mk 4 серии изначально были оружием "воздух-воздух". Учитывая ненаправленный характер ракеты, тенденцию к широкому рассеиванию при залповом использовании и в целом низкую эффективность в предполагаемой роли - особенно инцидент, в котором пара F-89 Scorpion выпустила более 200 ракет в неудачной попытке сбить неуправляемый беспилотник-мишень, - Mighty Mouse была совершенно непригодна для использования по назначению. Однако своеобразные характеристики ракеты были гениально использованы путём её перевода в роль оружия "воздух-земля" с действием по площади.
Став полезным инструментом, возможности оригинальной Mk 4 были расширены за счёт широкого спектра боевых частей, включая дымовые, противопехотные с флешеттами и те, которые использовались ВВС США на Фантоме - M156 с белым фосфором, Mk 1 осколочно-фугасная и Mk 5 кумулятивная противотанковая. В зависимости от местоположения и конфигурации точки подвески на каждую точку подвески можно установить до 3 пусковых установок LAU-3, каждая из которых несёт 19 FFAR.
Варианты
Доступные варианты:
| Вариант | Описание |
|---|---|
| Белый фосфор | Для обозначения областей цели |
| ОФ | Против пехоты и легкобронированных целей |
| Кумулятивная | Против бронированных целей, таких как транспортные средства |
Применение
Когда ручка выбора режима доставки находится в положении DIRECT, а ручка выбора оружия - в положении RKTS & DISP, а также главный переключатель включения - в положении ARM, ракеты можно запускать, удерживая нажатой кнопку Bomb.
Перед этим выберите соответствующие станции с помощью кнопок выбора станции и настройте желаемое количество и режим сброса на панели AWRU.
Для прицеливания переведите прицел в режим A/G и установите правильное снижение прицела.
| Высота | Скорость | Угол пикирования | Снижение прицела |
|---|---|---|---|
| 2500 футов | 450 - 500 KCAS | 10° | 30 мил |
| 2500 футов | 425 - 475 KCAS | 20° | 25 мил |
| 3000 футов | 400 - 425 KCAS | 30° | 15 мил |
| 3000 футов | 400 - 425 KCAS | 45° | 0 - 10 мил |
Как правило, стремитесь к скорости около 450 KCAS. Меньшая скорость и большая высота приводят к попаданию в нижний край визирной марки, а большая скорость или меньшая высота - к попаданию в верхнюю часть визирной марки.
Бомбы
Phantom II, будучи многоцелевым истребителем, оснащён универсальным набором бомб, которые подходят для самых разных боевых сценариев.
В основе бомбового вооружения F-4E лежит серия Mark 80, семейство авиационных бомб общего назначения, используемых десятилетиями, которые предлагают баланс разрушительной силы и простоты. В неё входят MK-82, MK-83, и MK-84. Эти неуправляемые бомбы были основным оружием во многих армиях.
Для миссий, требующих обширного охвата цели, F-4E Phantom II может быть сконфигурирован для несения кассетных бомб. Эти боеприпасы рассеивают более мелкие бомбы по заданной площади, эффективно насыщая зону цели.
F-4E может быть вооружён бомбами с лазерным наведением, такими как серия GBU. Эти боеприпасы используют системы лазерного наведения для наведения на обозначенные цели с исключительной точностью.
Также на F-4E были установлены бомбы с телевизионным наведением, такие как GBU-8 HOBOS (Homing Bomb System) и AGM-62 Walleye I и II. Эти управляемые боеприпасы были оснащены оптическими датчиками для отслеживания и поражения цели.
Также на F-4E устанавливаются некоторые специальные виды оружия, применяемые аналогично бомбам, которые включают в себя осветительные ракеты SUU-25, используемые для освещения поля боя и обозначения областей цели, и BLU-107 Durandal, специализированную противовзлётно-посадочную бомбу.

Обычные бомбы
Серия Mk 80

Обычные бомбы серии Mk 80, являющиеся основным оружием Фантома II в роли "воздух-земля", были впервые сброшены в бою над Северным Вьетнамом. F-4E способен нести 500-фунтовую Mk 82, 1000-фунтовую Mk 83 и 2000-фунтовую Mk 84. Следует отметить вариант Mk 82 с выбираемым сопротивлением, известный как Snakeye. Благодаря выбираемой конфигурации оперения на боеприпасе, выпускаемые стабилизаторы остаются в положении для низкого сопротивления и выпускаются в качестве аэродинамического тормоза крестообразной формы в настройке для высокого сопротивления. Изменение этой настройки осуществляется с помощью переключателя включения носа/хвоста.
Варианты
Доступны следующие обычные неуправляемые бомбы:
| Вариант | Боевая часть | Описание |
|---|---|---|
| Mk-81 | 250 фунтов | Низкое сопротивление |
| Mk-82 | 500 фунтов | Низкое сопротивление |
| Mk-82 AIR | 500 фунтов | Низкое/высокое сопротивление парашют |
| Mk-82 Snakeye | 500 фунтов | Низкое/высокое сопротивление |
| Mk-83 | 1000 фунтов | Низкое сопротивление |
| Mk-84 | 2000 фунтов | Низкое сопротивление |
| Mk-84 AIR | 2000 фунтов | Высокое сопротивление парашют |
| M-117 | 750 фунтов | Низкое сопротивление |
| SAMP-250 | 550 фунтов | Низкое сопротивление, используется на немецких F-4EF |
Учебные бомбы серии BDU

В зависимости от требований к обучению и дальности полёта Phantom II может нести 25-фунтовую учебную бомбу BDU-33, 500-фунтовую учебную бомбу BDU-45 или 500-фунтовую учебную бомбу BDU-50, как в конфигурации с низким, так и с высоким сопротивлением, для имитации несения и сброса стандартных боеприпасов Mk 82 и Snakeye.
Варианты BDU
Доступны следующие варианты семейства BDU:
| Вариант | Warhead | Описание |
|---|---|---|
| 33 | 25 фунтов | Низкое сопротивление |
| 50 HD | 500 фунтов | Высокое сопротивление |
| 50 LD | 500 фунтов | Низкое сопротивление |
| 45 LG | 500 фунтов | С лазерным наведением |
Применение
Обычные бомбы применяются с помощью настройки BOMBS на ручке выбора оружия.
Поддерживаются все режимы бомбометания на ручке режима доставки подробнее см. раздел 4.3.3.6. «Применение».
💡 Mk-82 Air и Snakeye можно переключать между конфигурацией с низким и высоким сопротивлением в зависимости от положения переключателя включения взрывателя. Носовой взрыватель включает бомбу, а хвостовой взрыватель переводит бомбу в режим высокого сопротивления, если он установлен, и низкого сопротивления, если он не установлен.
Кассетные бомбы
Доступны следующие кассетные бомбы:
| Вариант | Суббоеприпас | Количество | Описание |
|---|---|---|---|
| Mk-20 | Mk 118 | 247 | Кумулятивный |
| CBU-52B | BLU-61A/B | 220 | ОФ |
| CBU-87 | BLU-97/B | 202 | Комбинированного действия |
| CBU-1A/A | BLU-4B | 513 | ОФ |
| CBU-2/A | BLU-3 | 361 | ОФ |
| CBU-2B/A | BLU-3B | 418 | ОФ |
| BL-755 | Mk 1 | 147 | Кумулятивный, используется на немецких F-4F |
Mk 20 Rockeye

Mk 20 Rockeye, несущая 247 противотанковых бомб Mk 118, используется для доставки этой мощности по широкой площади рассеивания. Mk 20 имеет базовое время рассеивания в зависимости от варианта (4 секунды в варианте Mod 2 и 1,2 секунды в варианте Mod 3), а также выбираемое наземным экипажем дополнительное время, которое программируется перед взлётом. Совместно, оказавшись над областью цели, пилот может выбрать необходимую опцию с помощью переключателя включения носа/хвоста и применить оружие с профилем, наиболее подходящим для цели.
CBU-52B

Кассетная бомба, использующая контейнер суббоеприпасов SUU-30, загруженный 220 осколочно-фугасными зажигательными бомбами BLU-61A/B противопехотного и противоматериального действия.
CBU-87

Свободно падающая бомба, состоящая из контейнера SUU-65B с замедленным взрывателем. Несёт 202 суббоеприпаса BLU-97/B.
Каждый суббоеприпас прикреплён к небольшому тормозному парашюту, который замедляет их и увеличивает их разброс при падении. При ударе они имеют комбинированный кумулятивный, осколочный и зажигательный эффект, что делает их пригодными для противопехотного, противоматериального, а также противотанкового действия.
CBU-1, CBU-2

Контейнеры с 19 трубками каждый, загруженные либо 27 бомбами BLU-4B, 19 бомбами BLU-3, либо 22 бомбами BLU-3B ОФ. При ударе о землю каждая бомба разбрасывает осколки с высокой скоростью по радиальной схеме.
В случае CBU-2/A и CBU-2B/A, несомые бомбы BLU-3 загружены стальными шариками, подходящими даже для небронированных машин. CBU-1A/A, несущая бомбы BLU-4B, загружена противопехотными осколочными материалами.
BL-755

Кассетная бомба, разделённая на 7 отсеков, каждый из которых содержит 21 суббоеприпас, оснащённый кумулятивной боевой частью для пробивания брони.
После сброса суббоеприпасы рассеиваются с помощью надувного мешка.
Оружие широко использовалось во время Фолклендской войны Королевскими ВВС. Оно также использовалось ВВС Германии, в том числе на F-4F.
Применение
За исключением CBU-1 и CBU-2, кассетные бомбы применяются с помощью настройки BOMBS на ручке выбора оружия.
Однако CBU-1/-2 - это контейнеры, которые технически больше похожи на ракетную установку, чем на обычную бомбу. Для их правильного применения необходимо использовать настройку RKTS & DISP.
Настройку A также можно использовать в качестве резервного режима, который будет отправлять один импульсный сигнал на все выбранные пилоны при каждом нажатии кнопки Bomb.
Технически поддерживаются все режимы бомбометания на ручке режима доставки подробнее см. раздел 4.3.3.6. «Применение».
Однако, поскольку бомбы часто применяются с помощью замедленного взрывателя, наилучшие результаты достигаются, если они сбрасываются прямо над областью цели в режимах сброса с выравниванием DL или L. Режимы DT и TGT FIND, а также Direct, TL или OFFSET также можно использовать эффективно.
Бомбы с лазерным наведением
GBU-10, 12, и 24

Комплекты высокоточных бомб серии Paveway, созданные на базе обычных бомб серии Mk 80, устанавливают секцию наведения и секцию управляемых стабилизаторов на боеприпасы общего назначения Mk 82 (GBU-12) и Mk 84 (GBU-10 и 24) соответственно. Используя лазерный прицельный контейнер Pave Spike или лазерное целеуказание с другого самолёта, Paveway обеспечивает существенное повышение точности бомбометания Фантома, при этом более крупная конфигурация стабилизаторов GBU-24 обеспечивает большую дальность планирования для 2000-фунтового боеприпаса по сравнению с оригинальной GBU-10.
Варианты
Доступны следующие варианты семейства GBU:
| Вариант | Боевая часть |
|---|---|
| 10 | 2000 фунтов |
| 12 | 500 фунтов |
| 24 A/B | 2000 фунтов |
BDU-45 LG с лазерным наведением можно использовать для учебных целей.
Применение
GBU применяются с помощью настройки BOMBS на ручке выбора оружия.
Технически поддерживаются все режимы бомбометания на ручке режима доставки подробнее см. раздел 4.3.3.6. «Применение»..
Однако, если наведение не осуществляется с другого самолёта, TGT FIND в сочетании с прицельным контейнером Pave Spike является основным режимом применения GBU.
Код лазера, используемый бомбами, можно установить на земле во время перезаряжания или в редакторе миссий. Лазер, используемый для наведения Pave Spike, устанавливается на панели управления кодировщиком лазера WSO.
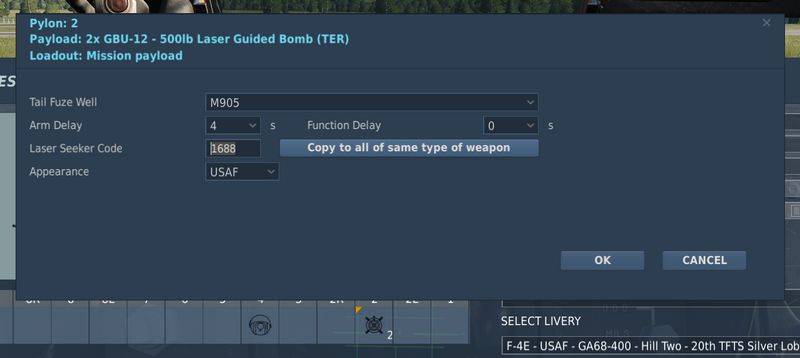
Бомбы с телевизионным наведением

F-4E Phantom II был оснащён бомбами с телевизионным наведением, в частности GBU-8 и AGM-62 Walleye, что расширило его возможности высокоточных ударов.
GBU-8, также известная как «HOBOS» (Homing Bomb System), её преемница GBU-15, а также AGM-62 I и II Walleye - это электрооптические планирующие бомбы с телевизионным наведением. Они представляют собой высокоточные боеприпасы, оснащённые телевизионной камерой в носовой части.
GBU-15 можно управлять после запуска через интерфейс передачи данных, что обеспечивает высокую точность и повышает эффективность F-4E при атаке хорошо защищённых и высокоценных целей, предоставляя решение для наведения «человек в контуре».
💡 Более ранний вариант DSCG не поддерживает интерфейс передачи данных. Таким образом, он может запускать оружие только в резервном режиме "Захват до запуска", аналогично Maverick, без ручного управления после запуска.
Исторически оба варианта Walleye также получили модернизации передачи данных (ER/DL). Однако F-4E никогда не был адаптирован для поддержки специфического интерфейса передачи данных Walleye для наведения «человек в контуре».
Как GBU-8/15, так и AGM-62 Walleye были важным дополнением к арсеналу F-4E, расширяя его возможности по нанесению точных ударов с уменьшением сопутствующего ущерба. Эти бомбы с телевизионным наведением продемонстрировали способность F-4E Phantom II интегрировать передовые боеприпасы для удовлетворения меняющихся требований миссии.
Варианты
Доступны следующие бомбы с телевизионным наведением:
| Вариант | Боевая часть | Описание |
|---|---|---|
| AGM-62 Walleye I | 1000 фунтов | |
| AGM-62 Walleye II ER | 2000 фунтов | увеличенная дальность |
| GBU-8 HOBOS | 2000 фунтов |
Применение
Во время трёхминутного периода прогрева полезно установить оптический прицел в режим A/G и ввести снижение 17 мил, чтобы выравнивание прицела соответствовало головке самонаведения ракеты. Таким образом, пилот может навести визирную марку на цель, и она будет находиться в поле зрения оружия.
После прогрева любая бомба сбрасывается путём выбора соответствующих станций, установки ручки выбора оружия в положение TV и ручки режима доставки в положение DIRECT.
Включите режим TV для экрана DSCG и нажмите на спусковой крючок. Это активирует датчик, и на экране появится видеосигнал.
💡 WSO управляет с помощью ручки управления, а не ручки управления антенной.

Датчик камеры не может поворачиваться. Разместите перекрестие в общем направлении области цели или, в случае запуска в режиме "Захват до запуска", прямо над целью. Нажмите и удерживайте спусковой крючок, чтобы выполнить захват.
Головка самонаведения пытается захватить цель по контрасту. Если ей не удаётся захватить цель, то, скорее всего, цель недостаточно выделяется на фоне.
💡 Из-за захвата цели по контрасту на основе телевизионного сигнала эффективность оружия может снижаться в сумерках, на рассвете или в условиях сильной облачности.

После захвата к символике добавляется чёрный квадрат, указывающий положение головки самонаведения.
Затем нажмите и удерживайте кнопку сброса бомбы в течение нескольких секунд, чтобы сбросить оружие.
💡 Эффективная дальность действия сильно варьируется в зависимости от высоты и скорости сброса. Механизм сброса не проверяет, находится ли боеприпас в пределах параметров. Чтобы снизить риск промаха оружия по цели, предпочтительнее запускать его с большей высоты и скорости.

Прочее
Осветительные ракеты SUU-25

Контейнер, загруженный 8 парашютными осветительными ракетами для обозначения областей цели или освещения поля боя ночью.
Для применения выберите режим доставки DIRECT и RKTS & DISP на ручке выбора оружия. Сбросьте их прямо над областью цели. Ракеты горят около 4 минут и их следует сбрасывать ниже 5000 футов (1500 м) над уровнем земли, если требуется освещение поля боя.
BLU-107 Durandal

BLU-107 Durandal - это сбрасываемая с воздуха специализированная противовзлётно-посадочная бомба, первоначально разработанная французской компанией Matra, которая использует свою двухзарядную боевую часть и предназначена для пробивания и вывода из строя взлётно-посадочных полос аэропортов, чтобы препятствовать операциям вражеских самолётов и последующему ремонту. Бомба, предназначенная для сброса с малых высот, выпускает парашют, чтобы замедлить своё снижение, прежде чем ракетный ускоритель направит её на взлётно-посадочную полосу, где она затем взорвёт свой основной заряд после пробивания взлётно-посадочной полосы, а её вторичный заряд взорвётся вскоре после этого (задержка между каждым зарядом была программируемой на более поздних моделях).
Для применения выберите режим доставки DIRECT, BOMBS на ручке выбора оружия и установите желаемый интервал и количество для длины взлётно-посадочной полосы. Сбросьте их прямо над областью цели на высоте около 500 футов (150 м) над уровнем земли, чтобы обеспечить достаточное время для выпуска парашюта.
Применение бомб
Фантом имеет широкий спектр режимов оружия для применения бомб. Большинство режимов требуют от WSO ввода данных в ARBCS/WRCS.
Для получения помощи в расчётах см. главу «Калькулятор бомбометания». Вы можете открыть и закрыть его, нажав RCTRL + B в игре.
💡 При полёте с Jester используйте инструмент калькулятора бомбометания для планирования атаки и сообщите Jester, чтобы он подготовил самолёт к этому профилю.
Режимы доставки можно условно разделить на:
| Категория | Режимы | Примечания |
|---|---|---|
| Точные | DT, TGT FIND | прямой обзор, без подготовки, цели вне плана |
| Доставка со смещением | OFFSET | цель не видна напрямую |
| Горизонтальный сброс | TL | например, безопасный сброс с большой высоты над облаками |
| Режимы сброса с выравниванием | DL, L | малая высота, высокое сопротивление или кассетные бомбы |
| Лофтирование и сброс | LOFT, O/S, INST O/S, T LAD | держитесь на расстоянии от цели |
| Ручной | DIRECT | резервный, классическое бомбометание по мил |
Пилот
После установки желаемого режима доставки на ручке режима доставки,пилот должен выбрать BOMBS на ручке выбора оружия.
💡 CBU-1 и CBU-2 необходимо применять с помощью настройки RKTS & DISP вместо BOMBS.
Затем соответствующие станции, с которых будут сбрасываться бомбы, выбираются и включаются с помощью главного переключателя включения и кнопок выбора станции.
Некоторые бомбы поддерживают настройки взрывателя, выбираемые с помощью переключателя включения носа/хвоста.
Затем пилот может установить количество бомб, сбрасываемых за один импульс сброса, и интервал между импульсами с помощью переключателей на панели AWRU.
После того, как всё настроено, бомбы обычно сбрасываются нажатием кнопки Bomb на ручке управления.
WSO
В зависимости от выбранного режима WSO должен настроить самолёт для желаемого профиля атаки. Обычно только режимы DT и TGT FIND не требуют подготовки.
Панель WRCS
Большинство соответствующих настроек можно найти на панели WRCS. Чтобы WRCS мог рассчитать правильные баллистические решения во время сброса без пикирования, WSO должен ввести коэффициент сопротивления, подходящий для желаемой бомбы и высоты, введя его с помощью регулятора коэффициента сопротивления.
💡 Значения коэффициента сопротивления можно рассчитать с помощью инструмента калькулятора бомбометания. Планшет также содержит таблицы поиска.
За исключением режима DT, необходимо ввести высоту цели или IP с помощью регулятора высоты цели/IP.
Если в одной атаке нужно сбросить несколько бомб, их схему можно сместить вперёд или назад с помощью регулятора упреждения сброса.
💡 Упреждение сброса можно легко рассчитать с помощью инструмента калькулятора бомбометания.
Для атак со смещением смещение вводится как расстояние в направлении север/юг и восток/запад до точки отсчёта (IP, VIP, RIP) с помощью регуляторов расстояния до цели.
💡 Расстояние до цели в направлении север/юг и восток/запад можно преобразовать из прямого расстояния и курса с помощью инструмента калькулятора бомбометания.
Определённые режимы, такие как DL и L, требуют ввода дальности до цели от заранее рассчитанной точки. Это можно сделать с помощью регулятора дальности сброса.
Вычислитель угла сброса бомбы
Для режимов лофтирования желаемый угол сброса можно установить с помощью регулятора Low Angle, а регулятор High Angle используется для режимов сброса.
Таймеры бомбометания
Режимы LOFT, O/S и T LAD требуют установки таймера набора высоты, который начнёт обратный отсчёт при пролёте над IP. После завершения отсчёта он даёт пилоту сигналы для начала манёвра набора высоты. Таймер необходимо рассчитать в соответствии с расстоянием и высотой цели относительно желаемой скорости и высоты самолёта, а также желаемого угла сброса.
💡 Значения таймера набора высоты можно рассчитать с помощью инструмента калькулятора бомбометания.
Кроме того, режимы TL и T LAD используют таймер сброса.
Точные режимы
Пикирующий сброс - DT
Одним из самых точных и простых в использовании режимов бомбометания является Dive Toss (пикирующий сброс).
Он требует прямой видимости и расчёта правильного значения коэффициента сопротивления для WRCS.
Пилот выполняет пикирующую атаку на цель, в то время как WSO получает точную информацию о дальности до цели с помощью радара. Как только цель будет обозначена, пилот просто удерживает нажатой кнопку Bomb и начинает плавно выходить из пикирования. Оружие автоматически сбрасывается в нужный момент во время манёвра.
Dive Toss использует отслеживание WRCS и radar в сочетании с другими датчиками самолёта для расчёта решения о сбросе в режиме реального времени. К цели можно подойти с любого направления, воздушной скорости и угла пикирования, и WRCS рассчитывает правильную точку сброса относительно захваченной траектории, настройки коэффициента сопротивления боеприпасов и любого ввода регулятора упреждения сброса (совместно с настройками AWRU settings)).
💡 Поскольку для многих профилей пикирующей атаки значение коэффициента сопротивления практически не меняется (например, сброс обычных бомб со средней высоты, высокой скорости и под крутыми углами), Dive Toss может быть очень щадящим режимом, который подходит для использования против целей вне плана с небольшой настройкой или планированием.
Инструмент калькулятора бомбометания можно использовать для расчёта соответствующего значения коэффициента сопротивления.
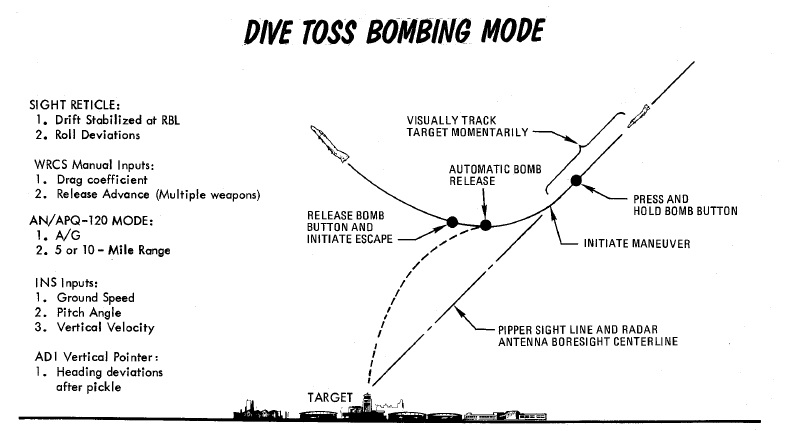
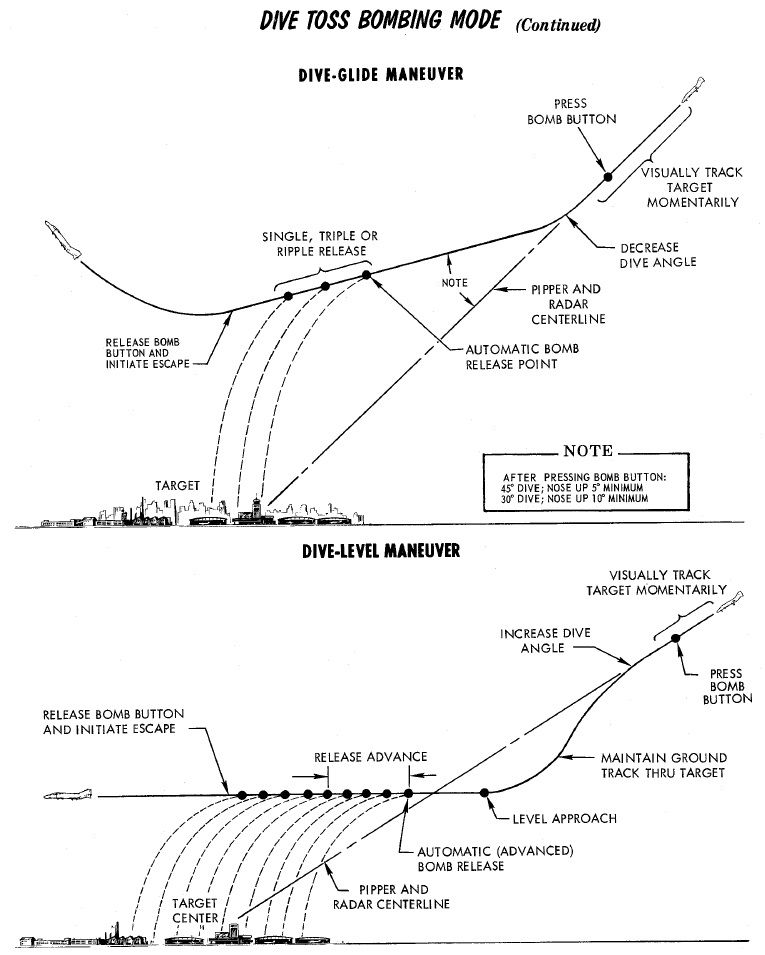
Процедура
Чтобы выполнить атаку Dive Toss, радар должен быть установлен в режим AIR-GRD, с настройкой дальности 5 или 10 миль. После установки пилот начинает атаку с оптическим прицелом в режиме "воздух-земля", и сетка автоматически фиксируется по углу места вдоль RBL. Затем пилот выбирает DT на ручке режима доставки, устанавливает ручку выбора оружия в положение BOMBS и выбирает желаемый интервал и количество на соответствующих ручках AWRU. В этот момент пилот может начать атаку.
Атака начинается в пикировании. Требуемый угол пикирования примерно на 20% больше, чем требуется для атаки в режиме Direct, чтобы достичь эффективного захвата радаром земли; то есть радар должен получить устойчивое отражение от земли, а не видеть фактическую цель, которая бомбардируется. Как только захват будет достигнут, пилот маневрирует, чтобы разместить визирную марку над предполагаемой целью, крыльями горизонтально, затем нажимает и удерживает кнопку сброса бомбы, чтобы ввести дальность радара в WRCS, а затем начинает желаемый манёвр выхода из пикирования, поддерживая крылья горизонтально. После того, как пилот нажмёт кнопку сброса бомбы, захват радаром земли больше не требуется. Манёвр выхода из пикирования должен поддерживать максимально постоянную скорость поворота для максимальной точности.
В точке, где рассчитанная траектория бомбы пересечётся с целью, WRCS подаёт сигнал сброса, сбрасывая боеприпасы на основе выбранных настроек количества и интервала.
Поиск цели - TGT FIND
Target Find изначально был просто вспомогательным режимом, производным от режима OFFSET; он не подаёт стандартный сигнал сброса на систему управления огнём и AWRUдля запуска сброса бомбы, а вместо этого использовался для подтверждения местоположения цели без сброса, для учебных целей или, при необходимости, для выполнения обновления системы INS.
Однако при установленном прицельном контейнере Pave Spike Target Find вместо этого сигнализирует WRCS использовать цель, определённую линией визирования контейнера, для доставки Dive Toss, вместо определения цели по захвату радаром.
В этом случае Pave Spike наводится на цель (активируйте лазер для более точного измерения наклонной дальности), и кнопка сброса бомбы нажимается и удерживается. Подобно обычной доставке Dive Toss, на HUD появляются сигналы наведения. Система автоматически сбросит бомбы, когда будут выполнены параметры баллистического решения.
💡 Необязательно выполнять манёвр пикирования, так как цель просто обозначается линией визирования контейнера вместе с измеренной наклонной дальностью вместо радара.
💡 TGT FIND с Pave Spike сравним с режимами CCRP на более новых самолётах. Обозначьте цель с помощью контейнера, удерживайте нажатой кнопку сброса бомбы, и оружие автоматически сбросится в нужный момент.
Доставка со смещением - OFFSET
Бомбометание со смещением обеспечивает возможность слепого бомбометания, с профилями бомбометания с большой и малой высоты, используя полную интеграцию WRCS, INS, и радара в сочетании. Бомбометание со смещением можно использовать как в визуальных, так и в инструментальных условиях, для сброса как бомб, так и сбрасываемых боеприпасов (в режиме RKTS & DISP).
Экипаж выбирает известную точку отсчёта (IP) и получает положение цели с помощью смещения относительно этой точки отсчёта. После настройки самолёта с соответствующими значениями атака затем выполняется путём обозначения точки отсчёта вместо фактической цели. Затем самолёт может автоматически сбрасывать оружие на основе значений смещения.
Точка опознавания
Настройка для атаки бомбометанием со смещением основана на выборе IP относительно известного местоположения цели. Для визуальной атаки она называется VIP - точка визуального опознавания, и запуск навигационного сопровождения выполняется путём прямого пролёта над VIP.
В условиях полёта по приборам IP называется RIP - точка радиолокационного опознавания, и захват этой точки с помощью радара в режиме MAP-PPI генерирует решение для навигации к цели.
При выборе во время планирования положение VIP или RIP относительно цели определяет пару значений смещения (отсюда и название режима); одно по оси север/юг, другое - восток/запад. Оба смещения указаны в футах, а максимальное смещение по каждой оси составляет 99 900 футов, или 16,44 морских мили.
Также во время планирования миссии определяется высота IP, и выбор делается с помощью таблиц поиска для соответствующего оружия, высоты над целью и скорости, учитывая дальность бомбометания. При подготовке вводов WRCS смещения всегда отсчитываются от IP до цели. IP следует выбирать как можно ближе к цели, чтобы минимизировать снос системы за счёт сокращения времени и расстояния навигации, а заход на IP следует выполнять с упором на минимизацию манёвров, необходимых для наведения носа на цель после захвата IP (RIP) или пролёта (VIP).
💡 Инструмент калькулятора бомбометания можно использовать для преобразования значений смещения из прямого расстояния и направления в необходимые расстояния север/юг и восток/запад.
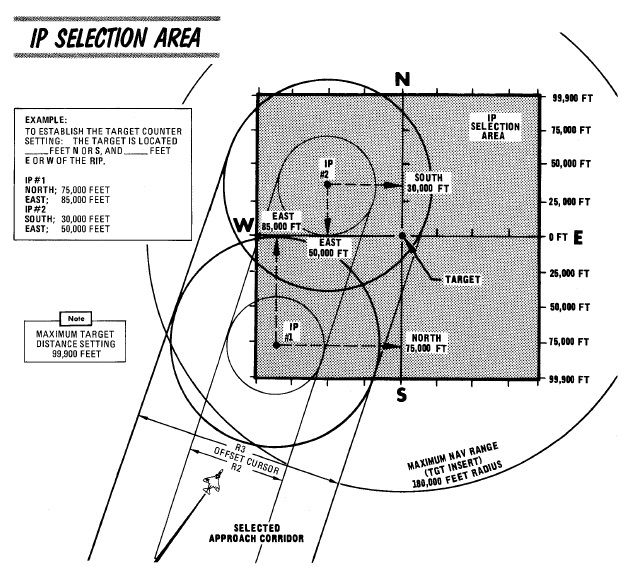
Учёт малой высоты RIP
Особо следует отметить необходимость компенсации разницы высот в случае, если заход на цель будет выполняться ниже высоты самой RIP. Поскольку расчёты, выполняемые WRCS и навигационной системой, являются механическими, выбор высоты RIP над траекторией может привести к повреждению из-за помех. Чтобы избежать этого, выполните следующие действия:
- Запишите высоту захода на посадку над уровнем моря.
- Вычтите высоту захода на посадку над уровнем моря из высоты RIP над уровнем моря.
- Вычтите полученное в п. 2 значение из высоты захода на посадку.
Результирующее значение используется для значения высоты цели, и пилот летит по запланированной траектории захода на посадку во время операций фиксации и ввода цели, как обычно.
Процедура
Визуальная IP
Перед пролётом над IP следует ввести смещения север/юг и восток/запад, дальность сброса (x10 в соответствии с окном или используя модификатор переключателя x100 на панели запуска WRCS) и любую желаемую настройку упреждения сброса. Кроме того, на AWRU следует выбрать желаемое время и количество сброса..
Атака Offset Visual IP начинается при пролёте над VIP, когда самолёт находится на желаемой высоте и скорости сброса; когда самолёт пролетает над VIP, WSO одновременно нажимает кнопки Freeze Signal и Target Insert Signal на панели управления курсором; это запускает отслеживание цели INS. В этот момент вертикальный ADI, прицел, BDHI, и навигационные средства HSI будут показывать смещение от рассчитанной точки сброса, а также дальность до цели на HSI и BDHI.
Завершение атаки выполняется пилотом путём маневрирования самолёта для выравнивания курса на точку сброса, поддержания запланированной воздушной скорости и высоты сброса и, перед достижением точки сброса, нажатия и удержания кнопки сброса бомбы. Если кнопка сброса бомбы отпущена до сброса боеприпасов, но на дальности, превышающей запрограммированную дальность сброса, атаку можно восстановить, нажав и удерживая кнопку сброса бомбы до тех пор, пока не произойдёт сброс. Когда это произойдёт, индикатор набора высоты загорится, чтобы подтвердить запуск сброса. Если кнопка сброса бомбы не будет нажата до тех пор, пока не будет пройдена точка сброса, бомбы не будут сброшены до тех пор, пока не будет пройдена цель; следовательно, кнопку сброса бомбы следует отпустить, чтобы отменить запуск до ошибочного сброса бомбы.
После завершения атаки программа навигации на установленную цель сохраняется. Самолёт может попытаться выполнить повторную атаку, хотя естественный снос INS может снизить точность этой второй атаки.
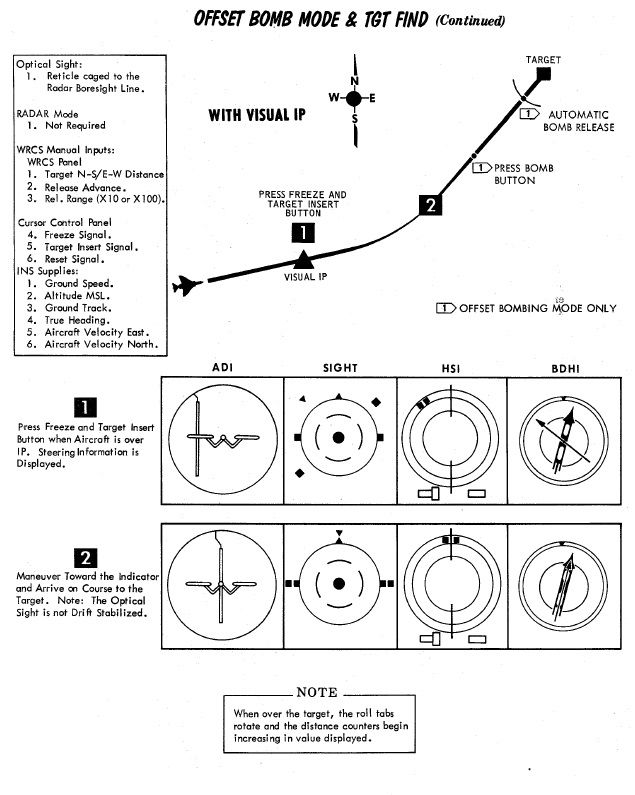
Радиолокационная IP
Перед фиксацией RIP и вводом цели следует ввести смещения север/юг и восток/запад, высоту RIP, дальность сброса (x10 в соответствии с окном или используя модификатор переключателя x100 на панели запуска WRCS initiate panel)) и любую желаемую настройку упреждения сброса. Кроме того, на AWRU следует выбрать желаемое время и количество сброса. Перед запуском пилот должен войти в область цели на желаемой высоте и воздушной скорости профиля. WSO должен подготовить APQ-120 к атаке с хорошим радиолокационным изображением в режиме MAP-PPI, режиме стабилизации NOR, сканировании WIDE и дальностью 10 или 25 миль, с наблюдаемым отражением от RIP.
Запуск атаки начинается с размещения курсора Along Track (представленного в виде растущей полусферы на радиолокационном дисплее, определяющей дальность до RIP) рядом с предполагаемым отражением RIP, но ниже него. Когда это установлено, курсор Cross Track (вертикальная линия) перемещается над RIP. Как только пересечение будет определено, WSO ждёт, пока дальность до RIP не уменьшится и не окажется на пересечении. В этот момент WSO нажимает кнопку Freeze. Это запускает отслеживание RIP радаром и даёт WSO возможность улучшить точку пересечения между курсорами Along Track и Cross Track. Как только точная точка будет достигнута, WSO нажимает кнопку Insert Target, которая передаёт наведение на цель INS и выполняет немедленное перемещение курсоров Along Track и Cross Track с RIP на смещённую цель.
В этот момент INS представляет информацию о наведении и дальности на ADI, прицеле, BDHI, и HSI. WSO должен продолжать следить за радиолокационным дисплеем - если фактическая цель появится на дисплее по мере уменьшения дальности, фактическую известную высоту цели можно ввести на панель WRCS, а курсоры Along Track и Cross Track можно подправить с помощью их органов управления, чтобы ещё больше повысить точность сброса.
Перед достижением дальности сброса пилот должен нажать и удерживать кнопку сброса бомбы. Как только бомбы будут сброшены, индикатор набора высоты загорится, чтобы подтвердить сброс.
В случае, если профиль RIP из-за ухудшения погодных условий переходит в профиль с возможным VIP, смещения можно сохранить в WRCS, и пилот просто пролетает над RIP, при этом WSO одновременно нажимает кнопки Freeze и Target Insert, как при атаке VIP.
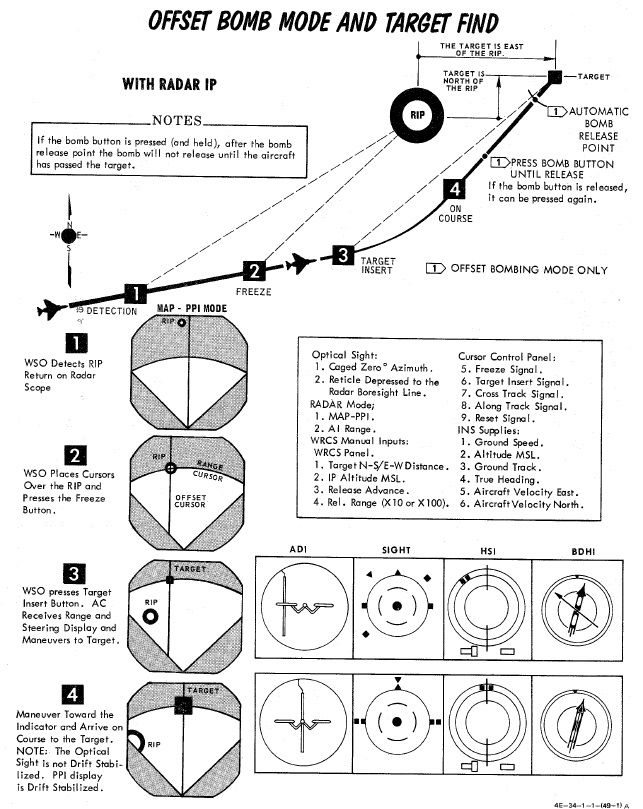
Практика
Если прицельный контейнер Pave Spike не установлен, режим TGT FIND можно использовать в качестве режима практики для OFFSET.
Затем он работает идентично режиму OFFSET, с той разницей, что не отправляет фактический сигнал сброса на оружие.
Горизонтальный сброс
Для сброса бомб в горизонтальном полёте можно использовать несколько режимов. В этой главе рассматривается режим TL. См. другие разделы для горизонтального сброса в режимах DIRECT, TGT FIND, OFFSET или L.
Замедленный горизонтальный сброс - TL
Замедленное горизонтальное бомбометание - это самый простой режим ARBCS, использующий только таймер сброса.
Как только кнопка Bomb нажата и удерживается, таймер начинает обратный отсчёт. Как только он достигнет нуля, оружие будет применено.
Благодаря своей простоте его можно использовать для атак с большой высоты, которые не требуют точности, сбрасывая бомбы безопасно над облаками.
Процедура
Настройка таймера сброса определяется на основе значения дальности бомбометания, определённого для выбранного оружия, с учётом желаемой высоты полёта над целью и воздушной скорости. Эта дальность определяет точку, в которой боеприпас(ы) будет сброшен с самолёта. IP выбирается относительно дальности бомбометания, а значение таймера сброса затем рассчитывается с использованием расстояния между точкой сброса и IP на основе выбранной воздушной скорости.
Таймер набора высоты следует установить на 000, а настройки High и Low Release можно оставить на любом значении.
Атака выполняется путём ввода необходимого значения таймера сброса, нажатия и удержания кнопки сброса бомбы при пролёте над IP и поддержания прямого и горизонтального полёта на запланированной воздушной скорости и высоте над целью до тех пор, пока оружие не будет сброшено с самолёта. В отличие от других режимов LABS, нет звука набора высоты или захвата стрелки ADI для иллюстрации отклонения тангажа или крена - это просто зависит от пилота, чтобы поддерживать горизонтальный полёт.
Режимы сброса с выравниванием
Сброс с выравниванием позволяет сбрасывать оружие с горизонтального положения крыльев, обозначая цель визуально либо с помощью визирной марки, установленной на определённое снижение прицела, либо с помощью радара.
Они наиболее эффективны при использовании для атак на малой высоте, а также при применении кассетных бомб или бомб с высоким сопротивлением.
Сброс с выравниванием - L
В этом режиме цель обозначается с помощью расстояния до точки перед целью (IP). Как только самолёт окажется над этой точкой, кнопка Bomb удерживается нажатой, и оружие автоматически сбрасывается после прохождения установленной дальности сброса.
В качестве визуального средства прицел следует опустить таким образом, чтобы он находился точно над целью, когда самолёт находится в IP. Таким образом, как только визирная марка окажется над целью, можно нажать и удерживать кнопку Bomb, и оружие поразит цель.
💡 Правильное снижение прицела можно рассчитать с помощью инструмента калькулятора бомбометания.
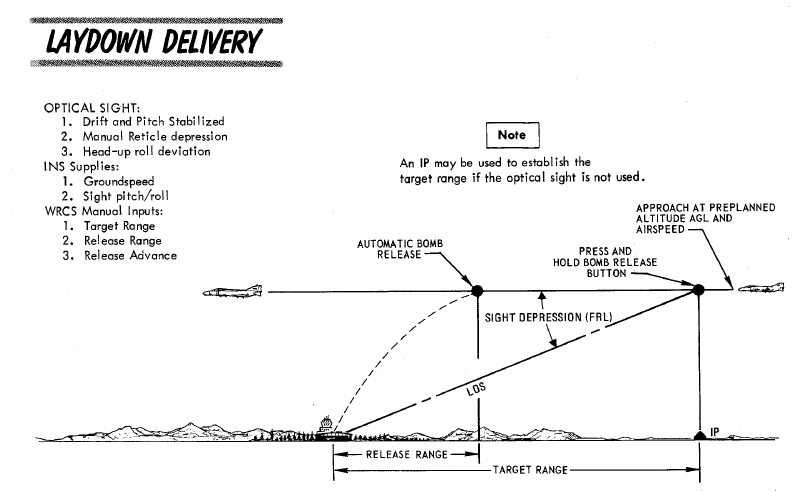
Процедура - L
Для настройки атаки сброса с выравниванием требуется ввести дальность до цели и высоту над целью из таблицы бомбометания на панель WRCS.
Оптический прицел следует установить на снижение, указанное в таблицах в режиме "воздух-земля", а заход на цель следует выполнять на истинной воздушной скорости (или путевой скорости), указанной в таблицах бомбометания для параметров, крыльями горизонтально.
Настройки AWRU и упреждения сброса WRCS следует ввести по желанию, а ручку выбора оружия установить в положение BOMBS или RKTS & DISP (только для контейнеров, таких как CBU-1 и CBU-2).
Когда визирная марка пересекает цель, кнопку сброса бомбы следует удерживать до тех пор, пока не будет сброшен установленный разброс боеприпасов.
Пикирующий сброс с выравниванием - DL
Этот режим является вариацией обычного режима сброса с выравниванием, где цель обозначается с помощью радара.
Поэтому пилот выполняет пикирующую атаку, аналогичную режиму Dive Toss , в то время как WSO получает точную информацию о дальности до цели путём захвата цели радаром.
После обозначения цели пилот выравнивается на запланированной высоте, и оружие автоматически сбрасывается на установленной дальности до цели.
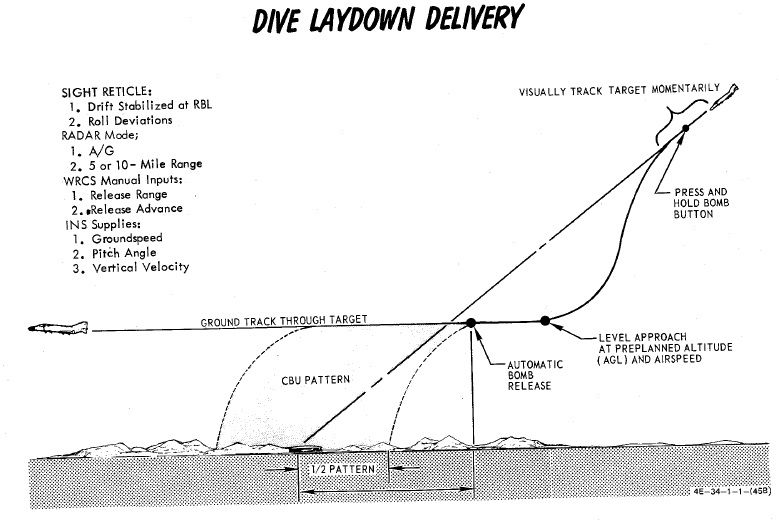
Процедура - DL
Дальность сброса из таблицы бомбометания необходимо установить непосредственно на панели WRCS, и пилот летит на запланированной скорости (истинная воздушная скорость или путевая скорость) на заданной высоте над целью, чтобы получить заданную дальность сброса.
Dive Laydown выбирается путём установки ручки режима доставки в положение DL и выбора RKTS & DISP (только для контейнеров, таких как CBU-1 или CBU-2) или BOMBS. Желаемая дальность сброса вводится на панели WRCS и, при необходимости, регулятор упреждения сброса.
Начало атаки такое же, как и в Dive Toss; выполняется пикирование под большим, чем обычно, углом, с радаром в режиме AIR-GRD на дальности 5 или 10 миль, генерируется устойчивое отражение, и пилот затем размещает визирную марку на предполагаемой цели и удерживает нажатой кнопку сброса бомбы.
После того, как это будет сделано, пилот выходит из пикирования на запланированную высоту бомбометания, поддерживает скорость и курс на цель с горизонтальными крыльями, и бомбы автоматически сбрасываются на желаемой дальности.
Ключевыми факторами точности в этом режиме являются правильная высота и угол тангажа в точке сброса.
Лофтирование и сброс
Фантом поддерживает различные способы лофтирования и сброса бомб на цели с минимальным воздействием наземного огня, жертвуя при этом точностью.
Эти режимы в основном предназначены для использования с ядерным оружием, но также могут эффективно использоваться с обычными бомбами при применении большого количества боеприпасов при атаке цели с большой площадью.
Они делятся на режимы лофтирования или сброса.
| Категория | Режимы | Release Angle |
|---|---|---|
| Лофтирование | LOFT, T LAD | менее 90° |
| Сброс | O/S, INST O/S | более 90° |
Преимущество лофтирования заключается в том, что можно избежать пролёта над целью, что значительно снижает риск быть атакованным. Оружие можно применять с больших расстояний, что позволяет самолёту развернуться до входа в опасную зону.
Если пролёт над целью возможен, режимы сброса позволяют повысить точность, обозначая цель визуально, запуская манёвр над областью цели. Преимущество по сравнению с другими режимами визуального сброса заключается в том, что время до попадания оружия значительно увеличивается, что позволяет самолёту удалиться на некоторое расстояние до попадания. Это очень важно при применении ядерного оружия.
LOFT
Как следует из названия, самолёт переходит с малой высоты на большую в наборе высоты, таким образом, лофтируя сброшенные боеприпасы в заранее рассчитанной точке, которая достигает цели.
Режим основан на расчёте и установке таймера набора высоты на основе желаемых параметров сброса, таких как высота, скорость и угол лофтирования.
Пилот летит к точке отсчёта, удерживает кнопку сброса бомбы и начинает манёвр набора высоты в момент, когда самолёт подаёт сигнал набора высоты. Оружие автоматически сбрасывается при достижении установленного угла лофтирования.

Процедура - LOFT
Планирование атаки с лофтированием требует знания местоположения цели, чтобы можно было рассчитать расстояния для IP и соответствующие дальности бомбометания. Таблицы баллистики используются для определения схемы доставки и дальности от набора высоты до цели.
С помощью этой информации можно определить количество бомб, которое определяет разброс, а зная дальность от набора высоты до цели - можно выбрать расстояние от точки набора высоты до IP.
Поскольку траектория от IP до набора высоты пролетается с постоянной скоростью, это можно использовать для определения времени от этого расстояния для ввода таймера набора высоты. А с помощью таблицы баллистики для малого угла профиль установлен.
💡 Инструмент калькулятора бомбометания можно использовать для расчёта правильного значения таймера набора высоты.
При входе в область цели пилот летит по предполагаемому курсу к IP и, оказавшись над ним, нажимает и удерживает кнопку сброса бомбы, чтобы начать запуск. Летя прямо или со сносом к точке набора высоты, пилот удерживает кнопку сброса бомбы нажатой и удерживает её до тех пор, пока желаемые боеприпасы не будут сброшены.
В режиме LOFT ARBCS программирует график набора высоты 4 G и автоматически сбрасывает выбранные боеприпасы, как только запуск бомбометания будет начат, таймер завершит отсчёт, и будет достигнут предустановленный малый угол тангажа (гироскоп).
В начале бомбометания, при нажатии кнопки сброса бомбы, ARBCS переопределяет любое другое навигационное наведение, предоставляемое на ADI, и берёт на себя управление указателями, чтобы показать отклонение относительно запрограммированного профиля атаки. Вертикальный указатель смещается в направлении, требующем ввода рыскания для поддержания выравнивания с целью. При приближении к точке лофтирования горизонтальная стрелка показывает отклонение от траектории полёта 1,0 G.
Когда таймер набора высоты завершает сигнализацию набора высоты 4 G, отклонение горизонтальной стрелки относительно желаемого постоянного набора высоты 4 G, при этом начальный снос представляет собой достижение перегрузки 4 G за две секунды. Поддержание горизонтальной стрелки отцентрированной означает, что пилот увеличил и удерживает перегрузку с правильной скоростью для максимальной точности. Управление ADI системой AN/AJB-7 поддерживается до тех пор, пока пилот не отпустит кнопку сброса бомбы после сброса последнего желаемого боеприпаса для запуска.
Замедленный сброс с малым углом на парашюте - T LAD(D)
Задуманный как способ доставки тактических ядерных бомб, замедленный сброс с малым углом на парашюте - это вариация LOFT, которая максимизирует время до попадания путём лофтирования бомбы с тормозным парашютом на максимальное расстояние до цели.
Режим выполняет заход на малой высоте, переходя через набор высоты 3,5 G в профиль набора высоты 45 градусов, который позволяет сбросить оружие в верхней точке набора высоты, позволяя попытаться уйти, пока тормозной парашют боеприпаса замедляет снижение к цели. Хотя изначально этот метод был разработан для ядерного оружия, он предоставляет ещё один вариант для точной доставки бомб с возможностью ухода на большой или с большой на малую высоту для соответствующих целей.
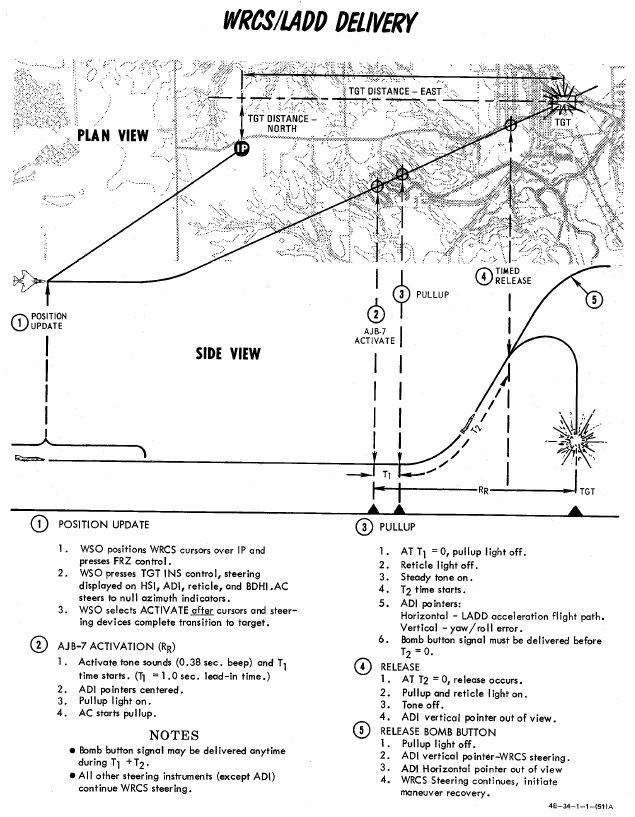
Процедура - T LAD(D)
Планирование атаки T LADD начинается с таблиц бомбометания, определения правильной высоты и воздушной скорости входа для выбранного оружия, а также результирующего набора высоты и времени от начала набора высоты до сброса - которое будет использоваться в качестве значения таймера регулятора Release, а также дальности полёта, которую этот манёвр набора высоты пройдёт самолётом.
Используя эту дальность в качестве базовой линии, определяется соответствующий угол захода на посадку и выбирается подходящая путевая точка IP. Расстояние между IP и точкой набора высоты оценивается относительно запланированной скорости профиля, что даёт ещё одно значение времени - это будет значение таймера набора высоты.
💡 Значения таймера можно получить с помощью инструмента калькулятора бомбометания.
Атака выполняется путём пролёта над IP по желаемому курсу перехвата цели на правильной скорости и высоте, и нажатия кнопки сброса бомбы при пролёте над этим IP, удерживая её нажатой в течение всего манёвра.
Это запускает таймер набора высоты. Стрелки ADI центрируются, а затем показывают отклонение от первоначального курса - вертикальная - крен, горизонтальная - горизонтальный полёт для поддержания текущей высоты.
По истечении времени таймера набора высоты будет подан предупреждающий тон набора высоты, и загорится индикатор набора высоты; затем таймер Release начнёт обратный отсчёт, горизонтальная стрелка ADI переключится на отображение отклонения от предполагаемого угла тангажа 3,5 G, а затем стабилизируется, как только будет достигнут угол тангажа 45 градусов носом вверх. Правильный выбор времени и загрузка набора высоты 3,5 G будут удерживать стрелку отцентрированной.
По истечении времени таймера Release запрограммированные боеприпасы будут сброшены, индикатор набора высоты погаснет, а стрелки ADI уберутся. Как только последний боеприпас будет сброшен, кнопку сброса бомбы можно отпустить и выполнить желаемый манёвр ухода.
Замедленный сброс через плечо - O/S
Подобно LOFT, этот режим позволяет применять оружие на основе таймера набора высоты, который представляет собой расстояние от IP до цели.
Оружие сбрасывается во время манёвра набора высоты при достижении установленного угла сброса. В этом режиме углы сброса превышают 90°; фактически оружие сбрасывается через плечо, в отличие от лофтирования вперёд.
Режим основан на расчёте и установке таймера набора высоты на основе желаемых параметров сброса, таких как высота, скорость и угол сброса.
Затем пилот летит к точке отсчёта, удерживает кнопку сброса бомбы и начинает манёвр набора высоты в момент, когда самолёт подаёт сигнал набора высоты. Оружие автоматически сбрасывается при достижении установленного угла сброса.
Процедура - O/S
Настройка системы LABS требует времени (рассчитывается с использованием известного расстояния от установленной IP до точки пролёта над целью и предполагаемой воздушной скорости) и рассчитанного угла сброса для результирующей воздушной скорости и боеприпаса, который вводится в настройку High Angle; это значение должно превышать 90 градусов, а настройки Low Angle и вторичного таймера можно оставить на любом значении.
💡 Значение таймера набора высоты можно рассчитать с помощью инструмента калькулятора бомбометания.
Полёт по соответствующему курсу на правильной скорости гарантирует пролёт над целью, и по истечении времени таймера будет слышен звуковой сигнал для начала набора высоты, а также загорится индикатор набора высоты. Это действие запускается нажатием кнопки сброса бомбы над IP и удержанием её нажатой в течение всей атаки.
Как и в режиме LOFT, индикация сигнала набора высоты также запустит горизонтальную и вертикальную стрелки на ADI для отображения соответствующих показаний тангажа и угла, чтобы поддерживать правильную ориентацию самолёта для точного входа в точку сброса, а целевая скорость набора высоты составляет 4 G. Наведение направляет атакующий самолёт через полупетлю, и бомбы будут сброшены при введённом значении High Angle.
Максимальная точность достигается путём поддержания горизонтальной стрелки отцентрированной во время всего бомбометания, и, как и в LOFT, ADI возвращается к предыдущей функции, как только кнопка сброса бомбы отпущена после сброса последнего предполагаемого боеприпаса для запуска.
Мгновенный сброс через плечо - INST O/S
Мгновенное бомбометание через плечо, производное от режима замедленного сброса через плечо, обеспечивает тот же комбинированный профиль атаки/ухода, что и предыдущий, против целей вне плана.
В этом режиме не требуется настраивать IP и таймер. Вместо этого цель обозначается однократным нажатием кнопки Bomb над целью и выполнением манёвра набора высоты вскоре после этого.
Процедура - INST O/S
Подобно замедленному сбросу через плечо, необходимо настроить желаемый угол сброса более 90°.
Как только самолёт окажется прямо над целью, пилот нажимает и удерживает кнопку сброса бомбы и начинает набор высоты 4 G с горизонтальными крыльями в манёвр полупетли.
Компьютер LABS выполняет те же переопределения дисплея ADI, что и Loft и замедленный сброс через плечо, размещая горизонтальную стрелку указателя на тангаже, соответствующем набору высоты 4 G, а вертикальный указатель отображает отклонение для поддержания правильного угла крена во время манёвра.
При достижении необходимого угла тангажа начинается отделение боеприпасов, и кнопку сброса бомбы можно отпустить после того, как все желаемые боеприпасы будут сброшены с самолёта, тем самым сбрасывая дисплей ADI.
Ручной сброс - DIRECT
Прямое бомбометание - это именно то, что подразумевается под этим названием: классическое прямое визуальное бомбометание, с возможностью как пикирующих, так и горизонтальных проходов сброса. Как ARBCS, так и WRCS исключены из этого режима сброса, и пилот летит по профилю, указанному для предполагаемого боеприпаса в таблицах бомбометания, устанавливая снижение прицела в соответствии с этим и вручную управляя самолётом, чтобы разместить визирную марку прямо на цели в соответствии с желаемым типом атаки.
Как только визирная марка будет наведена на цель, нажимается кнопка сброса бомбы, и будет сброшено выбранное количество боеприпасов с заданными настройками программы.
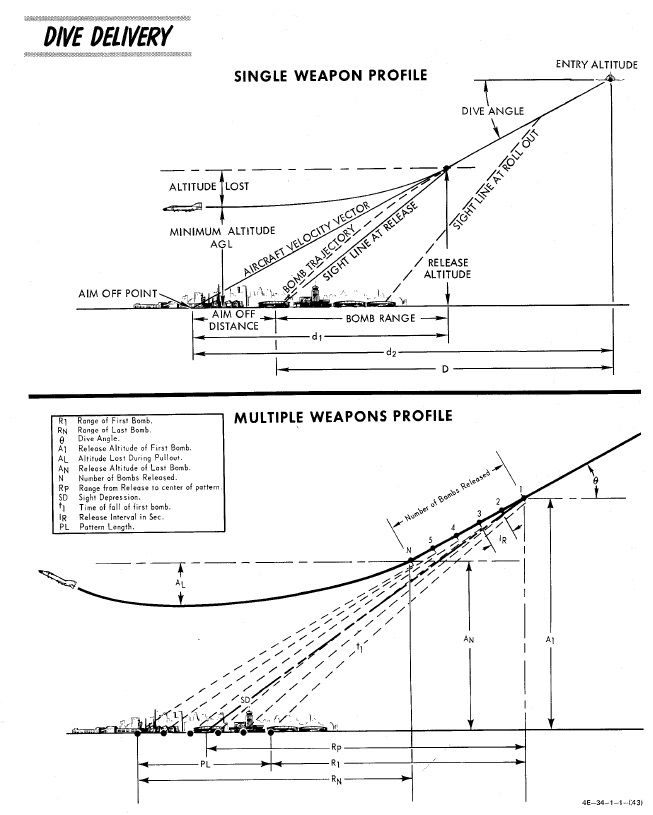
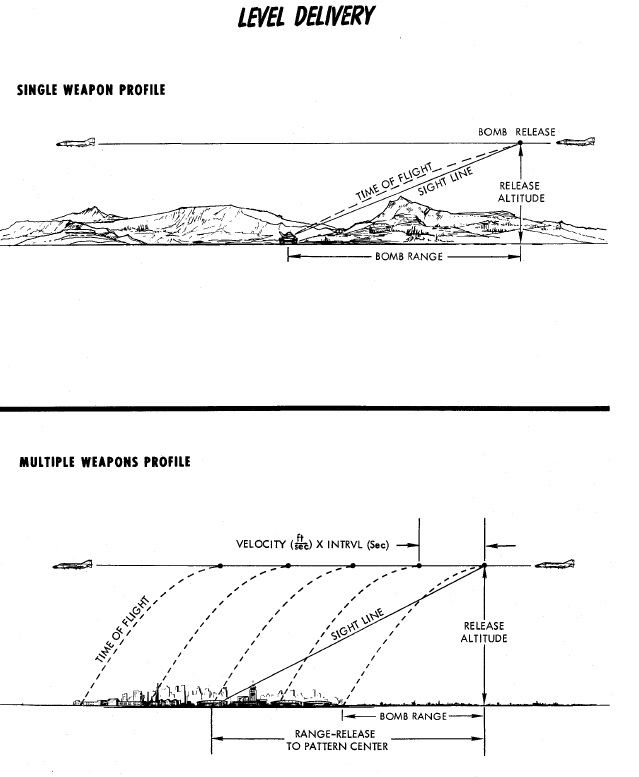
Хотя Direct является самым простым режимом, доступным для Фантома, он остаётся надёжным методом, когда позволяют условия, и может использоваться против любой цели, которую экипаж может видеть, - а именно, целей вне плана или в среде непосредственной авиационной поддержки.
Он также может быть очень полезен в качестве ведомого при сбросе бомб в строю, нажимая кнопку Bomb в момент, когда ведущий начинает атаку.
Или же при применении ракет или специальных боеприпасов, таких как осветительные ракеты.
💡 Планшет содержит таблицы бомбометания и поиска для ручного бомбометания, а также различные настройки в мил для снижения прицела в различных ситуациях.
💡 Подобно режиму Laydown (L), инструмент калькулятора бомбометания может рассчитать значения снижения прицела для атак на заданных расстояниях до цели.
Контейнеры
Пушечный контейнер SUU-23/A
Внешние пушечные контейнеры, вмещающие 1200 патронов, стреляющие со скоростью 6000 выстрелов в минуту. Подробнее см. в разделе «Пушки»..
AN/AVQ-23 Pave Spike

Прицельный контейнер AN/AVQ-23 Pave Spike, способный обнаруживать и отслеживать цели в дневных условиях и использовать лазер для наведения оружия на цель. Подробнее см. в разделе «Системы».
Контейнер ECM ALQ-131

Контейнер для радиоэлектронного противодействия, такой как подавление радаров и ракет с радиолокационным наведением. Подробнее см. в разделе «ECM».
Контейнер ACMI AN/ASQ-T50 TCTS

Контейнер, используемый для записи данных полёта для обучения и последующего анализа.
🚧 Контейнер в настоящее время является только визуальным и не имеет функций.
Контейнер ALE-40

Контейнеры средств противодействия, вмещающие дипольные отражатели и тепловые ловушки. Подробнее см. в разделе «Средства противодействия».
Баки

Чтобы увеличить дальность полёта, Фантом может быть оснащён тремя внешними топливными баками, получившими прозвище баки Sargent Fletcher:
- 1x 600 галлонов внешний центральный
- 2x 370 галлонов внешние баки крыла
Их также можно установить все одновременно, увеличив общее количество топлива с 12 896 фунтов без баков до поразительных 21 606 фунтов, удваивая дальность полёта.

С одним установленным центральным баком общее количество составляет 16 796 фунтов, а с обоими баками крыла - 17 706 фунтов.
Подробнее о том, как использовать баки, см. в главе 3.2.2. «Топливо».
Jester
"Вы получаете не только офицера систем вооружения, ребята. Вы получаете себе административного офицера, вы получаете себе планировщика полётов, вы получаете себе сторожевого пса, и он несёт полный набор карт и публикаций."
Управлять Фантомом - это уже само по себе непростая задача, а делать это в одиночку ещё сложнее.
Jester - это ваш приятель с искусственным интеллектом, который может взять на себя роль WSO, чтобы вы могли сосредоточиться на пилотировании.

В его обязанности входит:
- оказание помощи во время взлёта, дозаправки топливом в воздухе и
- посадки
- помощь в навигации
- помощь в использовании средств противодействия
- управление радаром
- управление прицельным контейнером
- обнаружение других самолётов и ракет
и многое другое...
Интерфейс
Пользовательский интерфейс Jester обеспечивает лёгкую связь и доступ к различным настройкам в полёте, удобно даже в стрессовых ситуациях.
Колесо
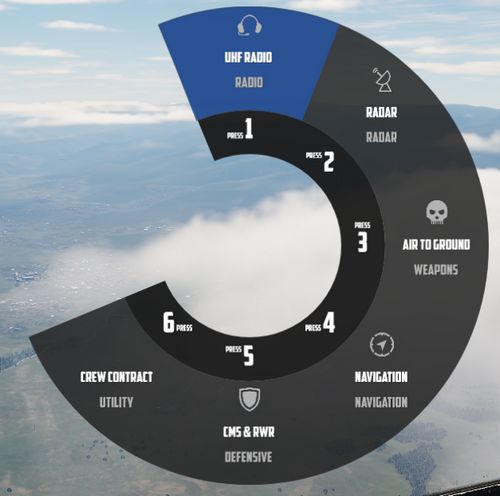
Основной интерфейс для взаимодействия с Jester состоит из кругового меню с несколькими подменю.
Подтверждение опции, такой как выделенная радиостанция UHF, откроет её подменю, предоставляя доступ к другим связанным опциям.
В некоторых случаях опции также представлены во внешнем меню.
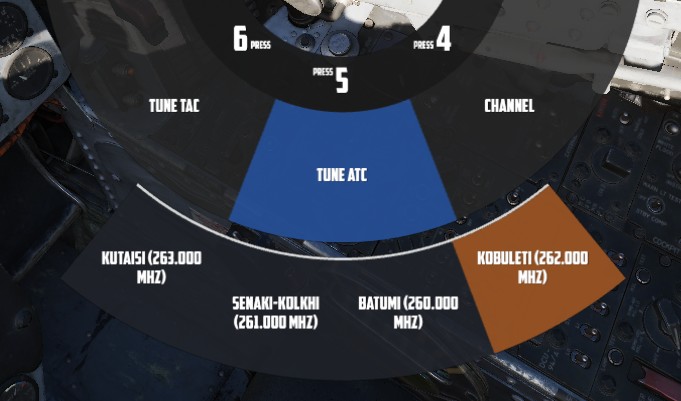
Интерфейс также поддерживает прямой ввод текста, когда это применимо, например, для ввода координат новой путевой точки. Для этого разрешено полное управление клавиатурой.
💡 При фокусировке на текстовом поле ввод в DCS отключён.
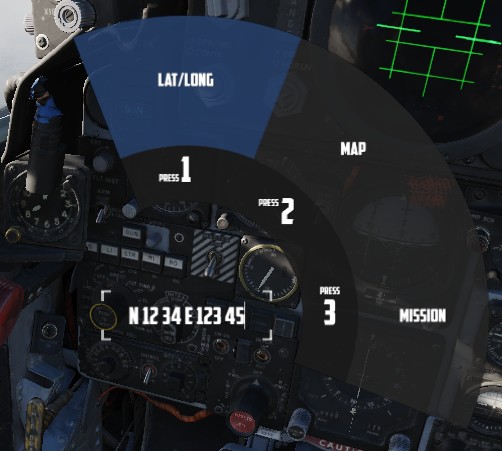
Чтобы подтвердить и отправить данные, снова выберите опцию (в данном случае LAT/LONG).
Управление колесом
Колесо Jester можно открыть, кратковременно нажав A, и закрыть, удерживая A нажатой.
Весь интерфейс доступен с помощью мыши, щёлкая левой кнопкой мыши по опциям или щёлкая по центральной области круга для возврата назад.
Опции также можно привязать непосредственно к клавиатуре или другим устройствам ввода. Горячие клавиши по умолчанию для доступа к опциям: LCTRL + 1 - LCTRL + 8.
Опции во внешнем кольце можно выбрать с помощью:
- Q - перемещение курсора против часовой стрелки
- W - подтверждение выбора под курсором
- E - перемещение курсора по часовой стрелке
Кроме того, курсор можно свободно перемещать либо с помощью назначаемой оси для мини-ручки, либо с помощью отслеживания головы. Настройку отслеживания головы см. в разделе 9.2 «Специальные опции»..
![]()
При перемещении курсора без мыши кратковременное нажатие A подтвердит выбор под курсором, а удержание A можно использовать для закрытия интерфейса.
💡 Большинство отдельных действий также предлагают прямую привязку, если это необходимо. Подробнее см. в разделе 9.1. «Органы управления»..
Диалог
Jester может проактивно задавать пилоту вопросы. В этом случае в нижней части экрана появляется меню с действиями.
Большинство действий являются временными и истекают, если с ними не взаимодействовать, и в этом случае Jester либо проигнорирует вопрос, либо предположит разумный ответ.
Одновременно может быть доступно до 3 действий, пилот может выбрать, с каким вопросом взаимодействовать.
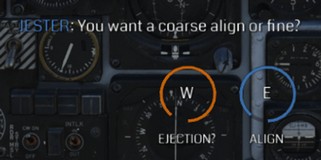
После выбора доступно несколько ответов. Некоторые из них также могут привести к последующим вопросам.
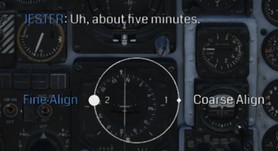
Управление диалогом
Весь интерфейс диалога доступен с помощью мыши, щёлкая левой кнопкой мыши по опциям.
Чтобы начать диалог, также можно использовать Q, W или E соответственно.
Ответы также можно привязать непосредственно к клавиатуре или другим устройствам ввода. Горячие клавиши по умолчанию для доступа к опциям: LCTRL + 1 - LCTRL + 4.
Кроме того, курсор можно свободно перемещать либо с помощью назначаемой оси для мини-ручки, либо с помощью отслеживания головы. Настройку отслеживания головы см. в разделе 9.2 «Специальные опции».
При перемещении курсора без мыши нажатие A подтвердит выбор под курсором.
Навигация
Навигация с Jester основана на управлении поворотными точками для двух планов полёта: основного плана полёта и вторичного плана полёта. Оба могут быть отредактированы и выполнены Jester одинаково, хотя основной план полёта считается основным, а вторичный план полёта служит резервным.
План полёта
План полёта состоит из путевых точек. Игрок может вставлять, удалять или редактировать их через интерфейс, карту или редактор миссий.

Если миссия назначила самолёту ряд путевых точек через редактор миссий, он будет доступен по умолчанию в качестве основного плана полёта.
Каждая путевая точка в плане полёта может быть обозначена как один из нескольких специальных типов. Эти обозначения будут влиять на действия Jester и фразы, которые он использует при приближении к путевой точке. Типы:
- Поворотная точка (по умолчанию): Это стандартный тип путевой точки. Jester автоматически переключится на следующую путевую точку, когда самолёт окажется в пределах 2 морских миль (NM) от поворотной точки, как показано на его BDHI.
- Навигационная фиксация (VIP - точка визуального опознавания): Jester выполнит обновление положения INS (инерциальной навигационной системы) при пролёте над этой точкой. Он сообщит расстояние до VIP за 10 NM и 5 NM. Перед достижением VIP Jester введёт необходимые координаты в навигационный компьютер, установит переключатель обновления положения навигационного компьютера в положение FIX, а затем выполнит обновление при пролёте над точкой визуального отсчёта. Важно отметить, что пилот должен пролететь над точкой визуального отсчёта, а не над точкой, указанной INS. Jester скорректирует координаты INS в VIP, и успех фиксации зависит от того, насколько точно визуальный пролёт совпадает с точкой отсчёта. После этого Jester сообщит, было ли обновление успешным или самолёт был слишком далеко от точки (в этом случае пролёт необходимо повторить). После успешной фиксации Jester переключится на следующую путевую точку.
- Начальная точка (IP): Jester сообщит расстояние до IP (за 15 NM, 10 NM, 5 NM и 2 NM) и напомнит, когда самолёт окажется в пределах 2 NM. После прохождения IP он переключится на следующую путевую точку.
- Цель (TGT): Аналогично IP, но с другими фразами, подходящими для области цели. Jester будет информировать пилота по мере приближения самолёта к точке (за 10 NM, 5 NM и 2 NM) и переключится на следующую путевую точку после прохождения цели.
- Вход в зону (F-IN) и Выход из зоны (F-OUT): Эти путевые точки работают аналогично типам IP и Target, но с дополнительными задачами.
- База (HB) и Запасной аэродром (ALT): Это обозначенные точки посадки. Jester не будет автоматически переключаться на следующую путевую точку в этих точках, и он сообщит о приближении самолёта к базе.
- Боевое воздушное патрулирование (CAP) Первая путевая точка, обозначенная как CAP, будет сохранена как CAP1, а вторая - как CAP2, независимо от их положения в плане полёта. Jester спросит, как долго пилот намерен оставаться на станции в CAP1. Затем он будет циклически перемещаться между CAP1 и CAP2 до тех пор, пока не истечёт назначенное время CAP, после чего он переключится на следующую путевую точку, следующую за CAP2 в плане полёта. Может быть несколько пар CAP1-CAP2.
🚧 Для Fence In и Fence Out Jester позже также проведёт пилота через определённые контрольные списки.
Маркер карты
Используя вид карты F10 в DCS, игроки могут создавать именованные маркеры на карте, просто дважды щёлкнув по желаемому положению после выбора Mark Label в верхней строке интерфейса.
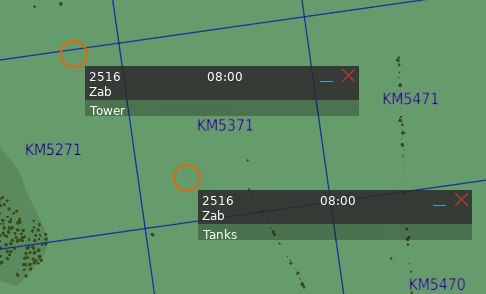
Через интерфейс эти маркеры карты затем можно импортировать в план полёта в качестве поворотных точек.

Настройка объекта
Интерфейс предлагает список ближайших объектов, таких как корабли, заправщики или наземные станции.
Их текущее положение можно импортировать в качестве поворотной точки напрямую.
💡 Для движущихся объектов, таких как заправщики, их фактическое положение может отличаться от запланированных координат. Для более точной навигации используйте TACAN или ADF.
Настройка аэродрома
Подобно настройке объектов, интерфейс предоставляет список ближайших аэродромов для навигации.
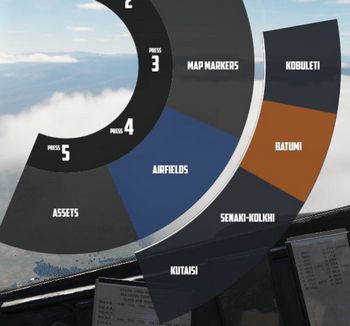
Ввод координат
Один из способов добавить поворотную точку - ввести соответствующую широту/долготу через интерфейс.
Формат: H DD MM H DDD MM, где:
H- полушарие (NилиSдля широты иEилиWдля долготы);D- градусы (от00до89для широты и от000до179для долготы);M- минуты (от00до59).
Действительный пример: N 45 32 E 047 12 или S 05 55 W 105 00.
💡 Пробелы необязательны,
N4532E04712также допустимо.

Работа
Jester ориентируется с помощью метода, называемого чехардой. Самолёт имеет только один слот для запоминания путевой точки (называемый TGT 2).
Запланированный маршрут
При чехарде TGT 2 всегда указывает на следующую поворотную точку текущего активного плана полёта. По мере приближения самолёта к этой поворотной точке (±2 морские мили) Jester автоматически обновит TGT 2 до следующей поворотной точки в последовательности.
Это позволяет пилоту следовать всему маршруту плана полёта, выбрав NAV COMP на панели выбора навигационной функции и следуя соответствующим показаниям на HSI.

Изменение маршрута
Помимо следования плану полёта, Jester способен изменить маршрут на другую незапланированную поворотную точку с помощью TGT 1.
Через интерфейс игроки могут переключаться между изменением маршрута (TGT1) и планом полёта (TGT2) в любое время.
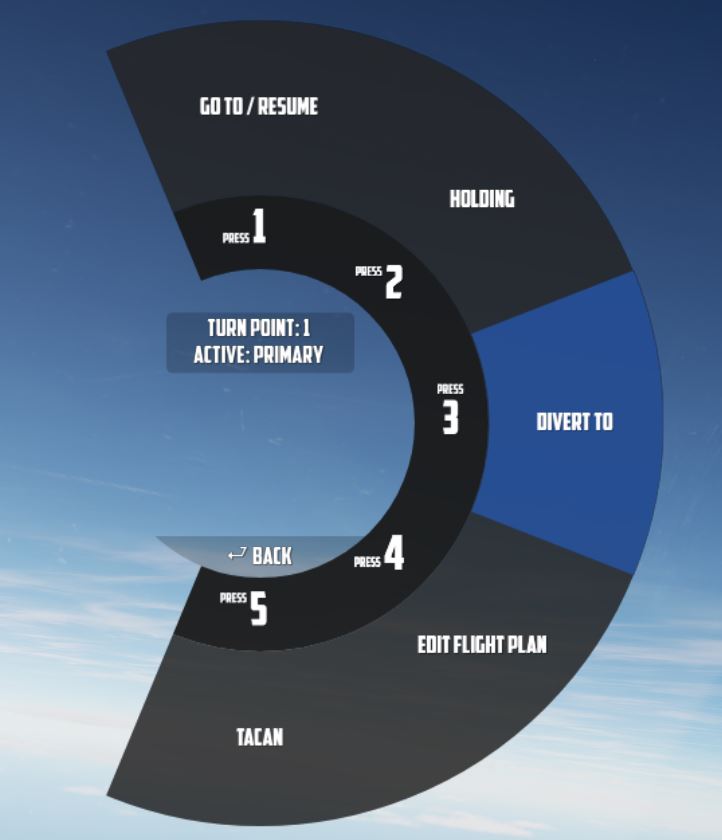
Приостановка и возобновление маршрута
Активный план полёта обозначается в интерфейсе звёздочкой * рядом с текущей поворотной точкой.
Автоматическое переключение поворотных точек можно временно отключить для каждой поворотной точки с помощью опции Holding (Удержание). Поворотные точки, обозначенные для удержания, отмечены буквой
h.
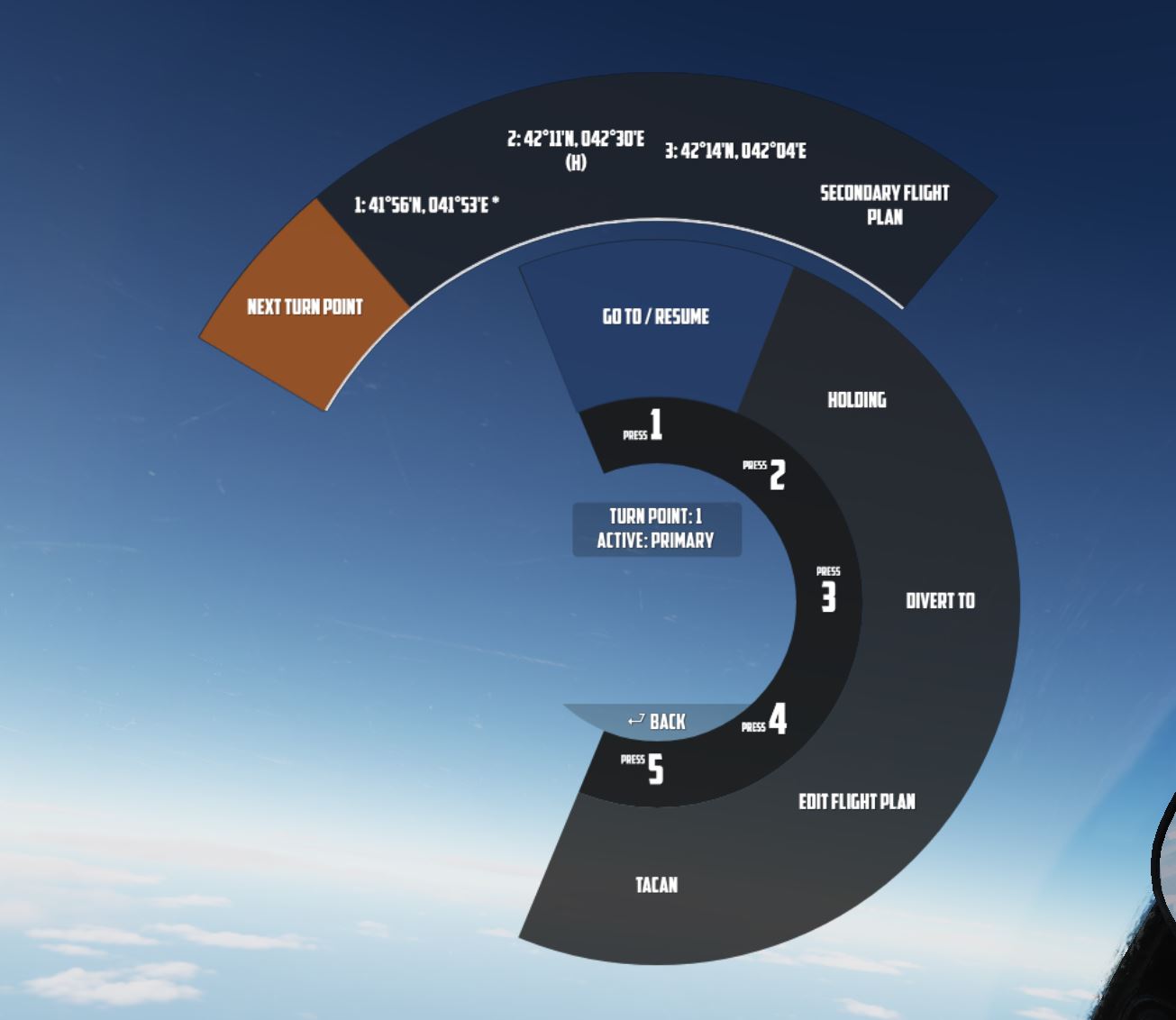
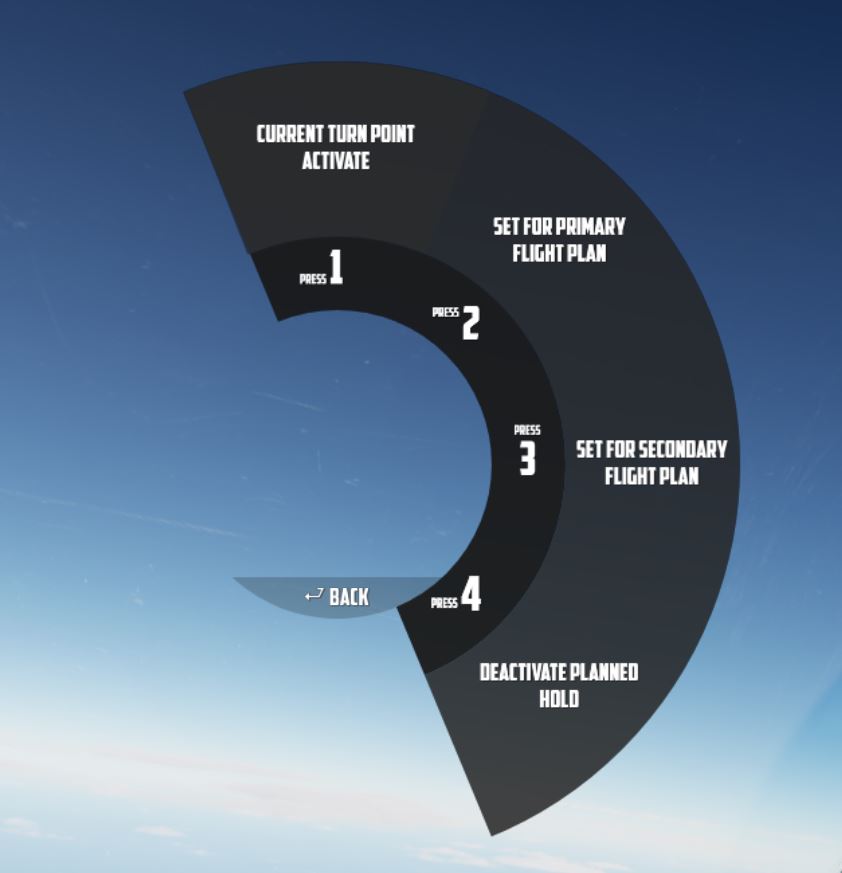
Когда план полёта приостановлен, например, потому что пилот изменил маршрут на другую точку (используя TGT 1), его можно снова активировать через интерфейс, используя опцию Go To/Resume (Перейти к/Возобновить).
Это также даёт возможность пропускать поворотные точки, переходя непосредственно к любой поворотной точке в её последовательности, а также возвращаться к предыдущим точкам или возобновлять движение с точки, обозначенной для удержания.
TACAN
Оборудованием TACAN могут управлять оба члена экипажа независимо друг от друга, а затем переключаться между пилотом и WSO с помощью кнопки Command (Команда) на панели.
Кроме того, Jester может настраиваться непосредственно на любой объект или наземную станцию, оснащённую TACAN.
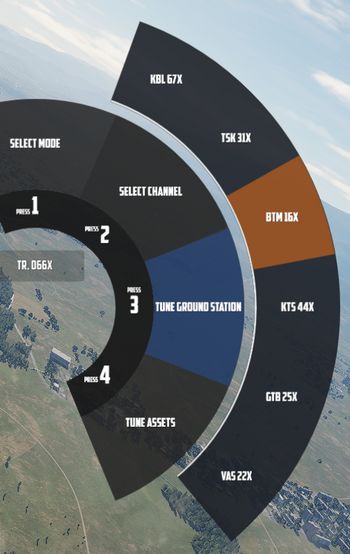
Это также позволяет пилоту настроить панель TACAN Jester со вторичной настройкой, чтобы затем переключаться между ними одним щелчком мыши по кнопке Command.
UHF
Радиостанция UHF продублирована между обоими членами экипажа и может управляться независимо. Использование кнопки Command (Команда) позволяет пилоту переключать управление между своей настройкой и настройкой Jester. Это позволяет пилоту настроить две конфигурации, а затем быстро переключаться между ними одним нажатием кнопки.
Jester может настроить радиостанцию непосредственно на любой ближайший объект или ATC, чтобы включить и открыть канал связи. С помощью ADF это также можно использовать для навигации.
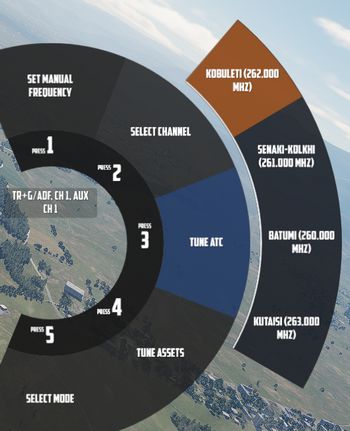
Бой
Помощь Jester в боевых ситуациях обычно делится на опции на колесе Jester, когда он ещё не находится в условиях активных действий, и умную команду Context Action (Контекстное действие) для использования в ситуациях, которые требуют быстрых действий, например, во время боя.
Context Action (Контекстное действие)
Команда Context (по умолчанию V) обеспечивает интуитивно понятное взаимодействие и обмен информацией между пилотом и WSO на основе следующих контекстов:
- Pave Spike - на ручке режима доставки выбран TGT FIND
- Dive Toss - на ручке режима доставки выбран DT или DL
- Ближний бой - режим CAGE или BORESIGHT
- За пределами визуальной дальности - другое
Действие Context может изменять семантику в зависимости от того, нажато ли оно кратковременно (•), удержано (▄) или дважды щёлкнуто (••, двойной щелчок).
| Контекст | Продолжительность | Действие |
|---|---|---|
| За пределами визуальной дальности - сканирование | • | Выбрать следующую цель |
| ▄ | Захватить выбранную цель | |
| •• | Захватить выбранную цель | |
| За пределами визуальной дальности - захват | • или ▄ | Сбросить захват, но удерживать цель в фокусе |
| •• | Сбросить захват и фокус | |
| Ближний бой | • | Выбрать следующий аспект цели |
| ▄ | Захватить/разблокировать контакт впереди | |
| •• | Выйти из режима CAGE или BORESIGHT | |
| Dive Toss (Пикирующий сброс) | Захватить/разблокировать отражение от земли | |
| Pave Spike | Захватить/разблокировать цель рядом с сеткой |
Радар
Во время полёта Jester будет постоянно использовать радар и искать контакты.
В определённых ситуациях, таких как посадка, нахождение на земле или выполнение дозаправки топливом в воздухе, радар будет находиться в режиме ожидания. Это также можно включить вручную, выбрав Radar > Operation > Go Cold (Радар > Работа > Отключить) в интерфейсе.
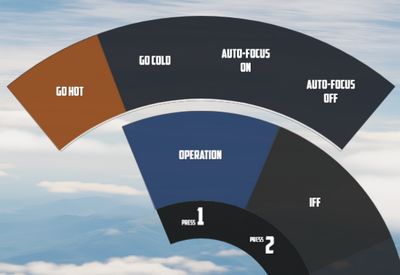
При использовании радара Jester обычно различает две фазы:
- Сканирование
- Захват
Пилот управляет фазами и переключает их с помощью Context Action (Контекстного действия).
Кроме того, Jester будет вести себя по-другому во время ближнего боя, что обозначается входом пилота в режим CAGE.
Сканирование
Это фаза по умолчанию, в которой будет находиться Jester. Он будет автоматически направлять антенну на разные высоты и дальности, чтобы сканировать всё пространство перед самолётом.
Jester автоматически идентифицирует любой новый контакт и сообщит о нём пилоту.
При желании игрок может попросить Jester выполнить запрос IFF вручную в любое время через интерфейс (это действие также можно привязать непосредственно к клавише). При необходимости игрок может вручную установить зону для сканирования Jester вне его обычной схемы через интерфейс.

Затем он сначала просканирует эту зону в течение некоторого времени, прежде чем вернуться к своей обычной схеме.
Аналогичным образом, можно выбрать дальность отображения и тип сканирования (широкий или узкий), которые будут использоваться во время сканирования.
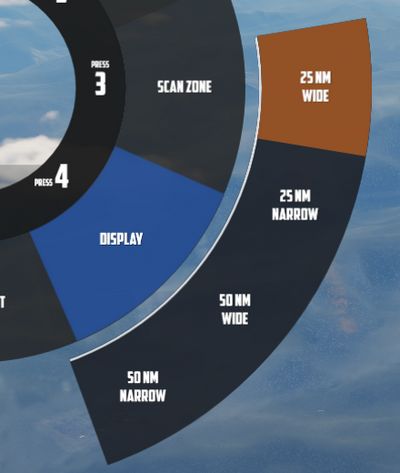
Выбор цели
Каждый раз, когда противник становится угрозой (ближе 25 морских миль), Jester автоматически выбирает цель, перемещая и удерживая курсор на соответствующем отражении радара.
Игрок может командовать выбором цели в любое время с помощью контекстных действий. Таким образом, можно выбрать и цели, находящиеся за пределами зоны угрозы.

Каждый раз, когда выбрана цель в пределах зоны угрозы, Jester сфокусируется на ней, остановит обычную схему поиска, автоматически перейдёт в узкий обзор и направит антенну на цель, чтобы максимизировать качество отслеживания.
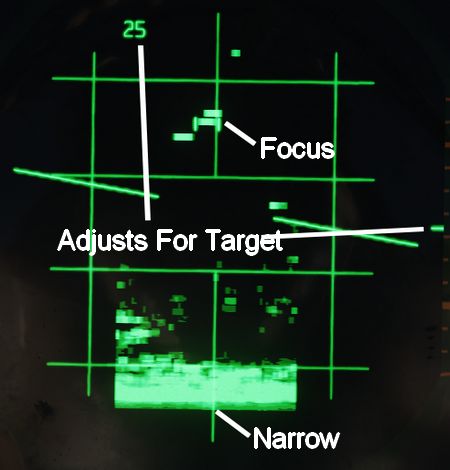
Этот режим можно понимать как "Отслеживание во время сканирования", когда Jester удерживает радар на определённом контакте, продолжая сканировать окружающее пространство, идентифицируя и сообщая о любых новых обнаруженных контактах.
Контекстные действия позволяют выбирать только вражеские самолёты. При необходимости на другие цели всегда можно сфокусироваться непосредственно через интерфейс.

Автоматический выбор цели и поведение фокусировки можно отключить в интерфейсе. Это может быть полезно при полёте через враждебную зону, ожидая контактов, при этом не желая атаковать их, а вместо этого сохранять обзор и продолжать схему сканирования. Например, когда у вас есть эскорт истребителей, которые вместо вас позаботятся о противниках.
Context Action
| Продолжительность | Контекстное действие |
|---|---|
| • | Выбрать следующую цель |
| ▄ | Захватить текущую выбранную цель |
| •• | Сбросить выбор цели |
Если на экране отображается только один противник, захват с помощью ▄ (долгое нажатие) требует предварительного выбора цели. Либо автоматически через Jester, либо с помощью • (короткое нажатие). В неоднозначной ситуации нажатие ▄ (долгое нажатие) сначала выберет цель с наивысшим приоритетом.
Нажатие •• (двойной щелчок) сбросит текущую выбранную цель и вернёт Jester к его стандартному поведению автоматического выбора угрозы с наивысшим приоритетом, если таковая имеется. Если вы хотите игнорировать цель в пределах зоны угрозы, сначала необходимо отключить автоматическую фокусировку цели через интерфейс. Затем можно нажать •• (двойной щелчок), чтобы отменить выбор цели.
Захват
Во время захвата Jester работает с радаром, чтобы удерживать захват как можно дольше.

Интерфейс также позволяет выбрать цель для захвата вручную без использования контекстного действия.
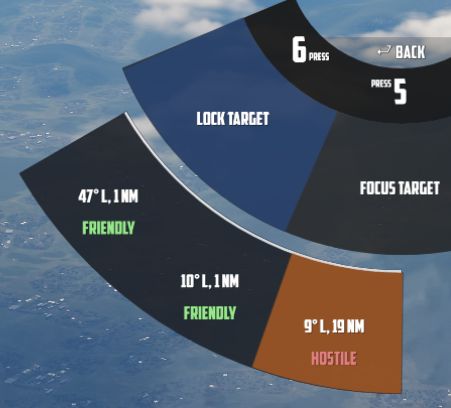
Если контакт пропадает, пока Jester пытается захватить его, он подождёт несколько секунд, пока отражение радара не появится снова.
| Продолжительность | Контекстное действие |
|---|---|
| •, ▄ | Сбросить захват, но удерживать цель в фокусе |
| •• | Сбросить захват и фокус |
💡 Если захват неисправен, а Jester этого не замечает (например, странное движение точки наведения или неожиданные показания скорости сближения), нажмите ▄, чтобы разблокировать, а затем снова ▄, чтобы попытаться снова захватить цель.
Ближний бой
Пилот входит в ситуацию ближнего боя, активируя режим CAGE или BORESIGHT.
CAGE включается нажатием кнопки CAGE на РУДе, BORESIGHT можно выбрать на колесе Jester.
В этом режиме радар автоматически совмещается с линией визирования вперёд, и Jester сможет захватить отражение.
Кроме того, пилот может войти в режим CAA, в котором система будет автоматически захватывать любой близкий контакт.
| Продолжительность | Контекстное действие |
|---|---|
| • | Выбрать следующий аспект цели |
| ▄ | Захватить или разблокировать контакт впереди |
| •• | Выйти из режима CAGE или BORESIGHT |
Чтобы захватить цель в режиме CAGE, нажмите ▄ (долгое нажатие), когда будете готовы. Jester автоматически заблокирует первое отражение цели, которое он сможет идентифицировать. Если в течение нескольких секунд цель не будет найдена, Jester прервёт процесс, и ▄ необходимо будет использовать снова.
💡 Цели должны находиться в пределах 5 градусов от линии визирования, иначе попытка захвата приведёт к плохому захвату. Если Jester ещё не захватил отражение, это потому, что он ждёт, пока пилот сначала поместит его в эту зону.
Аспект цели
Чтобы разрешить выстрелы Sparrow без захвата, пилот может сообщить Jester аспект цели.

При выбранной правильной настройке Sparrow можно запустить, и она должна быть способна отслеживать цель без предварительного захвата цели радаром.
Опции можно использовать только в режиме BORESIGHT или CAGE, используя Context Action • (короткое нажатие) для переключения между всеми настройками аспекта по порядку:
- NOSE (по умолчанию)
- FORWARD
- AFT
- TAIL
- WIDE
Опция по умолчанию - NOSE, чтобы обеспечить быструю реакцию на угрозу, летящую прямо на Фантом.
💡 Из-за сложности выбора правильного аспекта, а также из-за того, что цель движется и, следовательно, меняет свой аспект после запуска, такие атаки обычно имеют довольно низкую вероятность попадания. Однако это может быть единственным вариантом в определённых ситуациях, таких как бои на очень малой высоте.
Pave Spike
Если он установлен, Jester убедится, что прицельный контейнер готов к пикирующей атаке 12-VIS, когда это необходимо.
Это также можно включить вручную, выбрав
Air To Ground > Pave Spike > Operation > Standby или
Air To Ground > Pave Spike > Operation > Ready в интерфейсе.
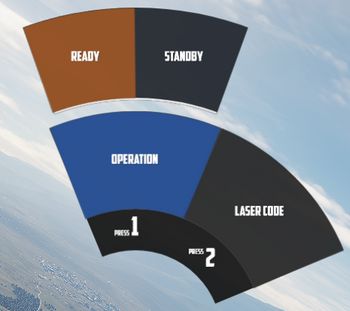
Кроме того, интерфейс позволяет пилоту изменить код лазера, используемый Pave Spike.
Пилот может приказать Jester сосредоточиться на управлении прицельным контейнером, выбрав TGT FIND на ручке режима доставки.
💡 Из-за ограничений DSCG работа Pave Spike и системы радара являются взаимоисключающими.
12-VIS Dive (Пикирование 12-VIS)
Нажатие Context Action (Контекстного действия) прикажет Jester захватить наземную цель рядом с сеткой. Последующее нажатие снова разблокирует цель.

Это можно эффективно использовать в режиме 12-VIS, когда пилот направляет нос на цель в коротком пикировании. После захвата цели пилот может выйти из пикирования и либо продолжить наблюдение за целью через контейнер, либо начать атаку. Подробнее см. 4.3.3.4. Применение.
🚧 Работа Jester с Pave Spike будет расширена в ходе раннего доступа. Чтобы преодолеть текущие ограничения, пилоту предоставляются временные привязки для управления ручкой антенны WSO. Это позволяет пилоту более эффективно использовать прицельный контейнер.
Бомбометание
Сброс боеприпасов на наземные цели с Jester состоит из двух фаз. Сначала Jester должен подготовиться к атаке, введя соответствующие данные на панели. Для большинства режимов сам запуск атаки может быть выполнен пилотом в одиночку. Однако для режимов Dive Toss и Dive Laydown Jester должен захватить отражение от земли с помощью радара.
Подготовка
Чтобы подготовить бомбометание, как пилот, так и WSO должны ввести несколько настроек в кабине.
Для Jester это включает в себя панель WRCS, такую как дальность сброса, высота цели или упреждение сброса, а также углы и таймеры LABS.
Чтобы подготовить Jester к бомбометанию, используйте инструмент «Калькулятор бомбометания» и передайте решение, используя кнопку «Tell Jester» (Сказать Jester).
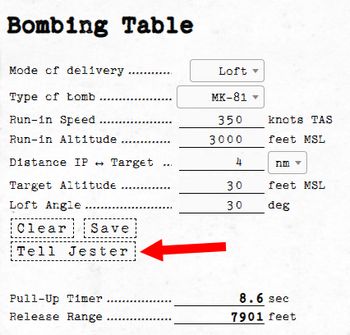
После активации Jester выполнит свою часть в подготовке самолёта к желаемой атаке.
Dive Toss (Пикирующий сброс)
Во время атаки Dive Toss или Dive Laydown, обозначенной выбором DT или DL на ручке режима доставки, команду Context Action (Контекстное действие) можно использовать, чтобы приказать Jester захватить отражение от земли после наведения носа на цель. Последующее нажатие снова разблокирует цель.
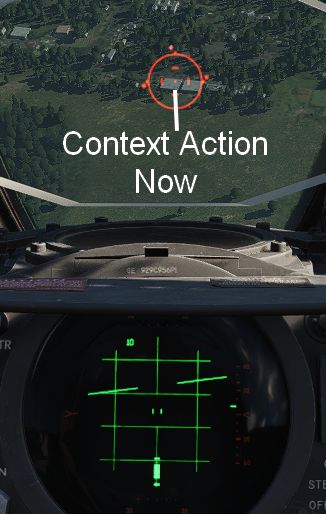
Таким образом, наземные цели можно эффективно атаковать во время пикирования. Пилот размещает сетку на цели, приказывает Jester захватить отражение, а затем набирает высоту, удерживая нажатой кнопку Bomb. Оружие будет автоматически сброшено вскоре после этого.
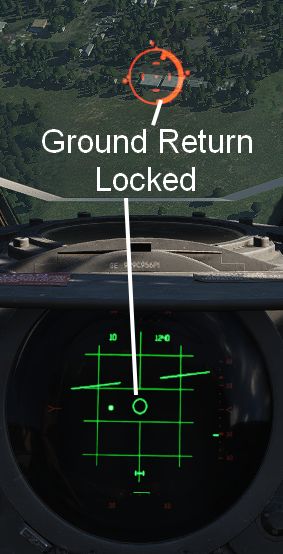
Прочее
В течение всего полёта Jester будет помогать пилоту во всех ситуациях.
Он будет сообщать о противниках во время ближнего боя и давать пилоту советы по наведению. Jester может сказать пилоту, в каком направлении уклоняться при атаке ракетой, сообщить ему о любом обнаруженном дружественном самолёте или просто о том, что кассета AVTR заполнена.
Хотя в его кабине нет топливомера, он будет следить за часами и стилем пилотирования пилота, чтобы напомнить ему о необходимости проверить уровень топлива или расход, если он забудет отключить переключатель сброса топлива.
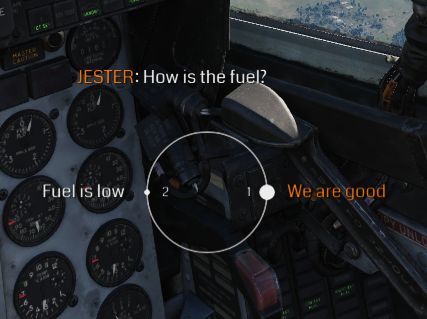
Jester способен оценивать и сообщать о боевых повреждениях в определённой степени и многое другое.
Запуск
Каждый раз, когда пилот выполняет холодный запуск самолёта, Jester также автоматически подготовит свою кабину к полёту.
В частности, это включает в себя выравнивание INS. Во время запуска Jester спросит пилота, готов ли он к выравниванию и какой вариант выравнивания выбрать.
Выравнивание следует начинать только после того, как пилот убедится, что питание будет стабильным, и самолёт не придётся перемещать до завершения процедуры.
💡 Jester может прервать выравнивание, если пилоту действительно нужно начать движение. В этом случае ожидайте ухудшения характеристик INS.
Помощь при взлёте и посадке
При взлёте Jester будет сообщать ключевые значения воздушной скорости, указывая пилоту, когда начинать крен.
По умолчанию Jester будет помогать игроку во время посадки, сообщая высоту, как это принято в гражданской авиации. Таким образом, пилот может лучше оценить текущее положение, особенно учитывая ограниченную видимость вперёд на Фантоме.
💡 Эту опцию можно отключить, см. 9.2. Специальные опции.
Дозаправка топливом в воздухе
Jester оказывает пилоту помощь в наведении во время дозаправки топливом в воздухе.
На начальном этапе он направит пилота в нужное место, чтобы заправщик мог подключить штангу, например, сказав:
"Переместитесь на 5 футов вперёд."

После подключения он посмотрит вверх и сфокусируется на цветных метках штанги. Jester сообщит, когда пилот слишком сильно смещается в любом направлении, что обозначается жёлтыми или красными метками на штанге.
Идеальная метка посередине называется «пончиком».

Подробнее о том, как выполнять дозаправку топливом в воздухе, см. 3.2.2. Система дозаправки топливом в воздухе.
Наземный персонал
 Сотрудник наземного персонала сигнализирует пилоту самолёта RF-4C Phantom II об остановке самолёта после руления на стоянку. Самолёт используется для поддержки учений FUERZAS UNIDAS PERU'87
Сотрудник наземного персонала сигнализирует пилоту самолёта RF-4C Phantom II об остановке самолёта после руления на стоянку. Самолёт используется для поддержки учений FUERZAS UNIDAS PERU'87
Наземный персонал (часто называемый «техниками») - это группа специалистов, ответственных за обслуживание и подготовку самолёта к полёту, когда он находится на земле. Эта важная роль включает в себя не только поддержание самолёта в хорошем состоянии путём проведения технического обслуживания, но и подготовку его к полёту. Подготовка к взлёту начинается задолго до прибытия лётного экипажа, но наземный персонал также непосредственно помогает экипажу во время запуска и выключения двигателей.
💡 Никогда не расстраивайте наземный персонал. Убедитесь, что вы правильно эксплуатируете свой самолёт и хорошо за ним ухаживаете, иначе вы будете чистить шины и укладывать парашюты до конца своей лётной карьеры.
Функции
Наши техники F-4 являются экспертами во многих областях, включая:
- Внешнее питание (предоставляется наземной тележкой)
- Внешний воздух (предоставляется наземной тележкой)
- Пусковые патроны двигателя
- Колодки для колёс
- Трап и ступеньки
- Проведение различных наземных проверок (перечислены ниже)

"Мы добавим тележку запуска, трап, дополнительные тормозные парашюты. Осмотрим ваши камеры сгорания, заменим гидравлическую жидкость, дозаправим жидкий кислород, возьмём пробы SOAP и очистим фонари."
Наземные проверки
Обзор
Процедуры F-4 включают в себя несколько наземных проверок, целью которых является убедиться, что определённые системы работают и настроены правильно. Наши техники могут помочь пилоту во время следующих проверок:
- Обогрев ПВД
- Привод интерцептора
- Дверь дозаправки топливом в воздухе
- Воздушные тормоза
- Предкрылки и закрылки
- Органы управления полётом
- Отключение ARI
- Stab Aug (стабилизация)
- Нейтральное положение триммера
- Тормозной крюк
Некоторые из них запускаются автоматически (например, когда техники замечают выпуск/уборку воздушных тормозов, они сообщат об этом). Более сложные проверки (выделены жирным шрифтом) необходимо запускать вручную.
Некоторые из них также можно провести без наземного персонала, получив визуальное подтверждение от WSO, но не все из них из-за ограниченной видимости из кабины.
Подробности
Более сложные проверки подробно описаны здесь:
Проверка обогрева ПВД
Установите обогрев ПВД в положение ON и дождитесь подтверждения от наземного экипажа, что он тёплый. После этого установите обогрев ПВД в положение OFF.
🟡 ВНИМАНИЕ: Обогрев ПВД не следует использовать более 1 минуты во время наземных операций.
Проверка привода интерцептора
При работающем правом/левом двигателе медленно отклоните ручку управления примерно на 1 дюйм влево/вправо. Попросите наземный экипаж или человека в заднем сиденье убедиться, что интерцептор не отклоняется полностью и что он возвращается в заподлицо положение, когда ручка возвращается в нейтральное положение. Прервите, если проверка интерцептора не пройдена.
Проверка органов управления полётом
Наземный персонал должен подтвердить положение всех органов управления полётом. Предкрылки и закрылки должны быть выпущены (OUT AND DOWN).
- Триммер тангажа - 1-3 ЕДИНИЦЫ НА ПИКИРОВАНИЕ
- Ручка управления - ОТТЯНУТЬ ПОЛНОСТЬЮ НАЗАД И ОТПУСТИТЬ
- Движение вперёд должно быть плавным и свободным от каких-либо ограничений. Ручка может не вернуться в полностью переднее положение. Ручка должна переместиться вперёд как минимум до ½ хода, и дальнейшее движение к упору не должно требовать усилия более одного фунта. (Техник должен сообщить о положении стабилизатора)
- Руль направления - ПРОВЕРИТЬ ПОЛНЫЙ ХОД ВЛЕВО И ВПРАВО (Техник должен сообщить о положении руля направления)
- Элероны/ARI - ПРОВЕРИТЬ
- Переместите ручку управления полностью влево. Убедитесь, что левый интерцептор поднят, правый элерон опущен, а руль направления немного повёрнут влево. Включите стабилизацию рыскания. Убедитесь, что руль направления перемещается ещё левее (Техник должен сообщить «KICK»). Нажмите рычаг аварийного быстрого сброса. Убедитесь, что руль направления перемещается к нейтральному положению (Техник должен сообщить). Отпустите рычаг аварийного быстрого сброса, нейтрализуйте ручку управления и отключите стабилизацию рыскания. Повторите проверку, заменив лево на право.
💡 Индикаторы MASTER CAUTION и CHK HYD GAGES могут загораться на короткое время во время этой проверки. Если давление восстанавливается без задержки, игнорируйте эту индикацию.
Проверка отключения ARI
Установите предкрылки и закрылки в положение NORM. Переместите ручку управления полностью вправо и влево. Убедитесь, что руль направления не перемещается (Техник должен сообщить).
Проверка Stab Aug (стабилизации)
Включите каждую ось стабилизации по отдельности. Убедитесь, что ни одна из рулевых поверхностей не перемещается (допустимо ¼ дюйма) (Техник должен сообщить). Если элерон/интерцептор отклоняется во время включения стабилизации крена, ему может потребоваться до 4 секунд, чтобы вернуться в исходное положение после отключения стабилизации крена. Дайте элерону/интерцептору достаточно времени, чтобы вернуться в исходное положение, прежде чем снова включать стабилизацию крена для проверки другого элерона/интерцептора.
Проверка нейтрального положения триммера
Проверьте работу индикатора триммера. Получите сигнал от наземного экипажа/человека в задней кабине о том, что элероны и руль направления установлены в нейтральное положение.
Связь
Оба члена экипажа могут общаться с наземным персоналом одним из двух способов:
- Внутренняя связь - гарнитура наземного персонала подключена к системе внутренней связи самолёта с помощью шнура, обеспечивающего двустороннюю связь, аналогичную связи между пилотом и WSO.
- Жесты руками - экипаж самолёта общается с наземным персоналом в одностороннем порядке с помощью жестов руками; когда используется этот метод, функции наземного персонала ограничены; вы сможете попросить выполнить более простые действия, такие как снятие колодок для колёс, но наземный персонал не поможет вам в проведении визуальных проверок.
В обоих режимах вы можете общаться с наземным персоналом с помощью меню "Crew Chief" (Наземный персонал) на колесе Jester. Самолёт должен быть неподвижен.
Если система внутренней связи настроена правильно, включена, а колодки для колёс установлены, будет активен режим внутренней связи, в противном случае будет использоваться режим жестов руками, и к названию меню «Crew Chief» будет добавлен текст «(hand signals)», чтобы указать на это.
💡 Поскольку внешняя внутренняя связь подключена параллельно с микрофоном и гарнитурой WSO, наземный персонал и WSO могут блокировать друг друга во время одновременной передачи. Кроме того, переключатель выбора функции WSO должен быть в положении HOT MIC, чтобы разрешить связь с землёй.
Вы можете проверить двустороннюю связь с помощью опции "Comms Check" (Проверка связи).
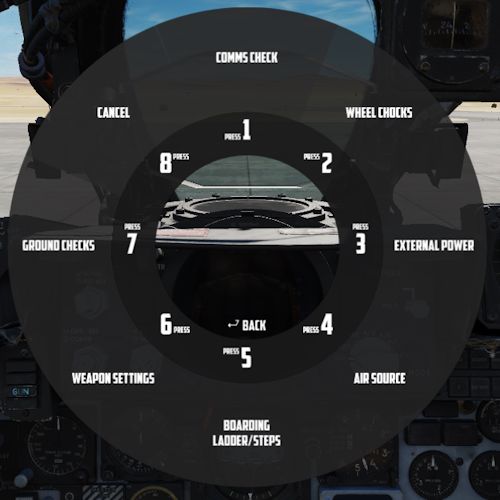
 Майор Стрэнглер, пилот самолёта F-4 Phantom II, разговаривает с наземным персоналом о готовности самолёта.
Майор Стрэнглер, пилот самолёта F-4 Phantom II, разговаривает с наземным персоналом о готовности самолёта.
Нормальные процедуры
Эта глава содержит стандартные процедуры эксплуатации F-4E Phantom II.
Процедуры экипажа до параграфа Перед рулением разделены на отдельные процедуры для пилота и оператора систем вооружения. Эти отдельные процедуры позволяют каждому члену экипажа выполнять проверки, не требуя от него читать проверки, выполняемые другим членом экипажа. Остальные процедуры объединены и закодированы для соответствующих действий членов экипажа. Элементы с кодом (P-WSO) применимы как к пилоту, так и к оператору систем вооружения. Элементы с кодом (WSO) применимы только к оператору систем вооружения, а элементы без кода применимы только к пилоту.
💡 Реальные процедуры и контрольные списки со временем менялись. Процедуры, приведённые в этом руководстве, основаны на временном диапазоне около 80-х годов и адаптированы к нашей симуляции Фантома. Процедуры, приведённые в других источниках, могут незначительно отличаться.
Объяснение используемой символики см. в разделе Определения.
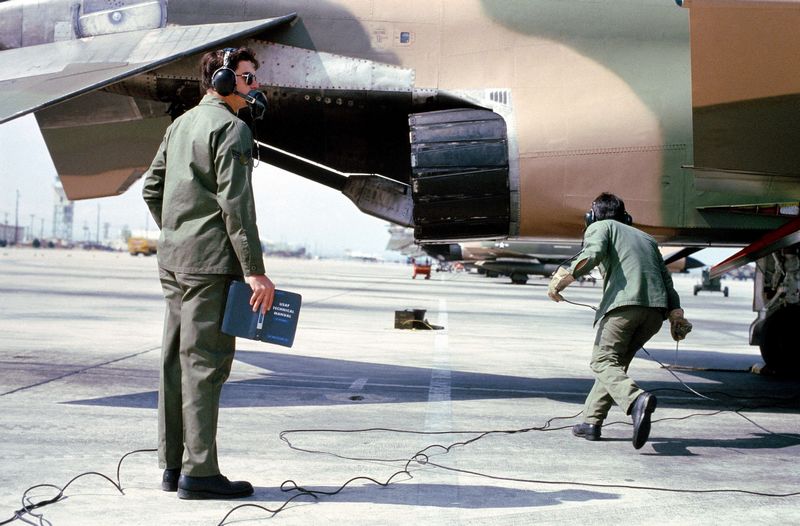 Члены наземного экипажа из 37-го тактического истребительного крыла выполняют техническое обслуживание самолёта F-4 Phantom II во время учений Gallant Eagle '82
Члены наземного экипажа из 37-го тактического истребительного крыла выполняют техническое обслуживание самолёта F-4 Phantom II во время учений Gallant Eagle '82
Подготовка к полёту и осмотр салона
💡 Если планируется запуск от аккумулятора, эти проверки, требующие электропитания, необходимо будет выполнить после запуска двигателей.
WSO (Оператор систем вооружения)
До подачи электропитания (WSO)
| Шаг | Система | Действие |
|---|---|---|
| 1. | Шлем | НАДЕТЬ |
| 2. | Контейнер дипольных отражателей AN/ALE-40 | OFF (ВЫКЛ) |
| 3. | Рычаги управления двигателями (РУД) | AFT (НАЗАД) |
| 4. | Радиостанция UHF | OFF (ВЫКЛ) |
| 5. | Переключатель AVTR | OFF (ВЫКЛ) |
| 6. | Питание радара | OFF (ВЫКЛ) |
| 7. | ЦУПР | OFF (ВЫКЛ) |
| 8. | Оборудование РЭБ | OFF (ВЫКЛ) |
| 9. | Инерциальная навигационная система (INS) | OFF (ВЫКЛ) |
| 10. | Переключатель согласия на применение ядерных боеприпасов | SAFE (БЕЗОПАСНО) |
| 11. | Навигационный компьютер | OFF (ВЫКЛ) |
| 12. | Переключатель отключения аккумулятора | OFF (ВЫКЛ) |
| 13. | Панели автоматических выключателей | ПРОВЕРИТЬ |
| 14. | Публикации и лётные данные | ПРОВЕРИТЬ |
После подачи электропитания (WSO)
| Шаг | Система | Действие |
|---|---|---|
| 1. | Переключатель наземного питания приборов | ACTUATE⚡ |
| 2. | Навигационный компьютер | УСТАНОВИТЬ |
| a. Режим навигационного компьютера | STBY (Ожидание) | |
| b. Счётчики ветра | УСТАНОВИТЬ | |
| c. Счётчик магнитного склонения | УСТАНОВИТЬ | |
| d. Переключатель обновления положения | NORM (Нормальный) | |
| e. Счётчик текущего положения | УСТАНОВИТЬ | |
| f. Счётчики цели | УСТАНОВИТЬ ДЛЯ TGT 2 | |
| g. Режим навигационного компьютера | RESET (Сброс) | |
| h. Режим навигационного компьютера | STBY (Ожидание) | |
| i. Счётчики цели | УСТАНОВИТЬ ДЛЯ TGT 1 | |
| 3. | Выравнивание INS | ПО ЖЕЛАНИЮ |
💡 Чтобы избежать прерывания электропитания, которое может привести к индикации NO-GO INS, убедитесь, что INS не находится в режиме ALIGN (Выравнивание), когда переключатели генератора установлены в положение ON (ВКЛ). Если прерывание питания всё же произошло, переведите ручку управления питанием в положение OFF (ВЫКЛ). Когда питание будет восстановлено, перейдите из OFF в ALIGN, кратковременно остановившись в STBY.
Полное выравнивание INS по гироскопическому компасу (WSO)
Время зависит от температуры окружающей среды и точности выравнивания BATH.
| Шаг | Система | Действие |
|---|---|---|
| 1. | Режим навигационного компьютера | STBY (Ожидание) |
| 2. | Ручка питания INS | STBY (Ожидание) |
| 3. | Прогрев гироскопа | ПОДОЖДАТЬ |
| a. Индикатор HEAT (Нагрев) | OUT (ВЫКЛ) | |
| 4. | Ручка питания INS | ALIGN (Выравнивание) |
| 5. | Выравнивание | ПОДОЖДАТЬ |
| a. Индикатор ALIGN (Выравнивание) | FLASHING (Мигает) | |
| 6. | Ручка питания INS | NAV (Навигация) |
| 7. | Индикатор INS | OUT (ВЫКЛ) |
Быстрое выравнивание INS BATH (WSO)
Занимает примерно 2 минуты 15 секунд.
| Шаг | Система | Действие |
|---|---|---|
| 1. | Режим навигационного компьютера | STBY (Ожидание) |
| 3. | Ручка питания INS | STBY (Ожидание) |
| 4. | Ручка питания INS | ALIGN (Выравнивание) |
| 5. | Выравнивание | ПОДОЖДАТЬ |
| a. Индикатор HEAT (Нагрев) | ИГНОРИРОВАТЬ | |
| b. Индикатор ALIGN (Выравнивание) | STEADY (Горит постоянно) | |
| 6. | Ручка питания INS | NAV (Навигация) |
| 7. | Индикатор INS | OUT (ВЫКЛ) |
Выравнивание INS по сохранённому курсу (WSO)
Занимает примерно 2 минуты 15 секунд.
| Шаг | Система | Действие |
|---|---|---|
| 1. | Режим навигационного компьютера | STBY (Ожидание) |
| 2. | Переключатель режима выравнивания | HDG MEM (Память курса) |
| 3. | Ручка питания INS | ALIGN (Выравнивание) |
| 4. | Выравнивание | ПОДОЖДАТЬ |
| a. Индикатор HEAT (Нагрев) | ИГНОРИРОВАТЬ | |
| b. Индикатор ALIGN (Выравнивание) | FLASHING (Мигает) | |
| 5. | Ручка питания INS | NAV (Навигация) |
| 6. | Индикатор INS | OUT (ВЫКЛ) |
| 7. | Переключатель режима выравнивания | GYRO COMP (Гироскопический компас) |
Внутренняя проверка (WSO)
| Шаг | Система | Действие |
|---|---|---|
| 1. | Педали руля направления | ОТРЕГУЛИРОВАТЬ |
| 2. | Высота катапультного кресла | ОТРЕГУЛИРОВАТЬ |
| 3. | Рукоятка и чехол ручки управления | ПРОВЕРИТЬ |
| 4. | Панель управления связью и навигацией | УСТАНОВИТЬ |
| a. Ручки управления частотой связи | ПО НЕОБХОДИМОСТИ | |
| b. Ручка управления каналом связи | ПО НЕОБХОДИМОСТИ | |
| c. Переключатель выбора режима | ПО НЕОБХОДИМОСТИ | |
| d. Ручка регулировки громкости связи | ПО ЖЕЛАНИЮ | |
| e. Ручка управления вспомогательным каналом | ПО НЕОБХОДИМОСТИ | |
| f. Ручка регулировки громкости Aux | ПО ЖЕЛАНИЮ | |
| g. Ручка выбора функции COMM | TR + G - ADF | |
| h. Ручки регулировки громкости навигации | ПО НЕОБХОДИМОСТИ | |
| i. Ручка выбора функции TACAN | OFF (ВЫКЛ) | |
| j. Командная кнопка связи | ПО ЖЕЛАНИЮ | |
| k. Командная кнопка навигации | ПО ЖЕЛАНИЮ | |
| 5. | Громкость VOR/ILS/курсового радиомаяка | ПО ЖЕЛАНИЮ |
| 6. | Аварийный рычаг предкрылков/закрылков | FORWARD |
| 7. | Панель управления внутренней связью | УСТАНОВИТЬ |
| a. Регулировка громкости | ПО ЖЕЛАНИЮ | |
| b. Ручка выбора усилителя | NORM (Нормальный) | |
| c. Переключатель выбора функции | HOT MIC (Горячий микрофон) | |
| 8. | Аварийный рычаг шасси | ВНУТРЬ И ЗАФИКСИРОВАТЬ |
| 9. | Рычаг аварийного тормоза | ВНУТРЬ И ЗАФИКСИРОВАТЬ |
| 10. | Индикаторы положения предкрылков/закрылков | ПОКАЗАНИЯ IN (Убраны) и UP (Подняты) |
| 11. | Индикаторы положения шасси | ПОКАЗАНИЯ ШАССИ ВЫПУЩЕНО |
| 12. | Ручка аварийного сброса фонаря | ВПЕРЁД |
| 13. | Радиолокационный индикатор | ЗАФИКСИРОВАТЬ |
| 14. | Авиагоризонт | ПРОВЕРИТЬ И УСТАНОВИТЬ⚡ |
| ПРОВЕРИТЬ И УСТАНОВИТЬ | ||
| b. Установите линию горизонта на одном уровне с миниатюрным самолётом | ||
| 15. | Часы | ЗАВЕСТИ И УСТАНОВИТЬ |
| 16. | Акселерометр | УСТАНОВИТЬ |
| 17. | Ручка выбора функции навигационного компьютера | ПО ЖЕЛАНИЮ |
| 18. | Ручка выбора питания KY-28 | OFF (ВЫКЛ) |
| 19. | Селектор режима KY-28 | P |
| 20. | Ручка ручного разблокирования фонаря | ВПЕРЁД |
| 21. | Звуковой тон | ПО НЕОБХОДИМОСТИ |
| 22. | Ручка управления освещением кабины | ПО НЕОБХОДИМОСТИ |
| a. Переключатель белого прожектора | OFF (ВЫКЛ) | |
| b. Ручка управления освещением панели приборов | b. Ручка управления освещением панели приборов | |
| c. Ручка управления освещением консоли | b. Ручка управления освещением панели приборов | |
| d. Переключатель подсветки резервного компаса | b. Ручка управления освещением панели приборов | |
| e. Переключатель прожектора консоли | b. Ручка управления освещением панели приборов | |
| f. Ручка управления яркостью индикаторов | b. Ручка управления освещением панели приборов | |
| 23. | Сигнальные лампы и индикаторы | ПРОВЕРИТЬ ⚡ |
| 24. | Система внутренней связи | ПРОВЕРИТЬ |
| 25. | Индикатор количества кислорода | ПРОВЕРИТЬ⚡ |
| Проверьте, достаточно ли количества и не виден ли флажок OFF. | ||
| 26. | Система подачи кислорода | ПРОВЕРИТЬ И УСТАНОВИТЬ |
| 27. | Системы RWR | ПРОВЕРИТЬ, ЗАТЕМ ВЫКЛЮЧИТЬ⚡ |
Пилот
До внутренней проверки (пилот)
| Шаг | Система | Действие |
|---|---|---|
| 1. | Шлем | НАДЕТЬ |
| 2. | Защита нижней ручки катапультирования | ВВЕРХ (не применимо) |
| 3. | Переключатели генератора | OFF (ВЫКЛ) |
| 4. | Переключатель выбора тепловых ловушек AN/ALE-40 | NORMAL (Нормальный) |
| 5. | Переключатель сброса топлива из внутренних баков крыла | NORM (Нормальный) |
| 6. | РУДы | OFF (ВЫКЛ) |
| 7. | Кнопка аварийного сброса внешних боеприпасов | ПРОВЕРИТЬ, НЕТ ЛИ ЖЁЛТОГО ЦВЕТА ВНУТРИ КРУГЛОЙ ЗАЩИТЫ |
| 8. | Рычаг шасси | ВНУТРЬ И ВНИЗ |
| 9. | Селектор сброса ракет | OFF (ВЫКЛ) |
| 10. | Переключатели вооружения | OFF/SAFE (ВЫКЛ/БЕЗОПАСНО) |
| 11. | Обогрев ПВД | OFF (ВЫКЛ) |
| 12. | Аккумулятор | ПРОВЕРИТЬ |
| Чтобы определить замыкание реле аккумулятора, включите главный переключатель двигателя и проверьте правильность положения индикаторов шасси и предкрылков/закрылков. | ||
| 13. | Главные переключатели двигателя | OFF (ВЫКЛ) |
| 14. | Посадочные огни | OFF (ВЫКЛ) |
| 15. | Автоматический выключатель аварийной системы отсчёта ориентации | IN (ВКЛ) |
| 16. | Радиостанция UHF | OFF (ВЫКЛ) |
| 17. | Селектор системы отсчёта | STBY (Ожидание) |
| 18. | Публикации и лётные данные | ПРОВЕРИТЬ |
| 19. | Магазин фотопулемёта | УСТАНОВИТЬ |
| 20. | Пылезащитный чехол фотопулемёта | УБРАТЬ (с оборудованием 780) |
| 21. | Внешнее питание | ВКЛЮЧИТЬ 🔧 И ПРОВЕРИТЬ, ЧТО ВКЛЮЧЕНО |
| 22. | Переключатели генератора | EXT ON (Внешнее ВКЛ) |
| 23. | Преобразователь-выпрямитель | ПРОВЕРИТЬ ⚡ |
| Оба преобразователя-выпрямителя работают, если индикаторы шасси показывают шасси выпущено при выключенных главных переключателях двигателя и переключателях генератора в положении EXT. |
Внутренняя проверка (пилот)
| Шаг | Система | Действие |
|---|---|---|
| 1. | Педали руля направления | ОТРЕГУЛИРОВАТЬ |
| 2. | Высота катапультного кресла | ОТРЕГУЛИРОВАТЬ ⚡ |
| 3. | Рукоятка и чехол ручки управления | ОТРЕГУЛИРОВАТЬ |
| Проверьте, что рукоятка надёжно закреплена на ручке управления, а чехол ручки управления установлен на место и не имеет разрывов. | ||
| 4. | Вспомогательная панель управления вооружением | УСТАНОВИТЬ |
| a. Переключатель гироскопа | NORM (Нормальный) | |
| b. Ручка регулировки звукового тона | LOW (Низкий) | |
| c. Индикатор положения трапа | ВЫДВИНУТ | |
| 5. | Переключатель отключения предкрылков | NORM (Нормальный) |
| 6. | Панель управления внутренней связью | УСТАНОВИТЬ |
| a. Регулировка громкости | ПО ЖЕЛАНИЮ | |
| b. Ручка выбора усилителя | NORM (Нормальный) | |
| c. Переключатель выбора функции | HOT MIC (Горячий микрофон) | |
| 7. | Переключатель тепловых ловушек ALE-40 | NORMAL (Нормальный) |
| 8. | Панель управления топливом | УСТАНОВИТЬ |
| a. Переключатель перекачки топлива из внутренних баков крыла | NORMAL (Нормальный) | |
| b. Переключатель сброса топлива из внутренних баков крыла | NORM (Нормальный) | |
| c. Переключатель выбора дозаправки | ALL TANKS (Все баки) | |
| d. Переключатель внешней перекачки | ПО НЕОБХОДИМОСТИ | |
| e. Переключатель дозаправки топливом в воздухе | RETRACT (Убрать) | |
| 9. | Переключатели стабилизации | OFF (ВЫКЛ) |
| 10. | Насосы наддува | ПРОВЕРИТЬ⚡ |
| Включите переключатель проверки левого насоса наддува, убедитесь, что индикатор давления левого насоса наддува показывает 30 ±5 фунтов на квадратный дюйм. Подождите 3 секунды после отпускания левого переключателя, затем повторите с правым насосом наддува. Убедитесь, что переключатели тестирования вернулись в положение NORMAL (Нормальный). | ||
| 11. | Панель VOR/ILS | УСТАНОВИТЬ |
| a. Ручка регулировки громкости | ПО ЖЕЛАНИЮ | |
| b. Ручка регулировки громкости маркера | ПО ЖЕЛАНИЮ | |
| c. Частота | ПО ЖЕЛАНИЮ | |
| d. Переключатель тестирования VOR/MKR | TEST⚡ | |
| 12. | Переключатель предкрылков/закрылков | ПО НЕОБХОДИМОСТИ |
| Переключатель предкрылков/закрылков должен соответствовать индикаторам. | ||
| 13. | Аварийный рычаг предкрылков/закрылков | ВПЕРЁД |
| 14. | Рычаг управления тормозным парашютом | ВНИЗ И ЗАФИКСИРОВАТЬ |
| 15. | Переключатель воздушного тормоза | IN (ВНУТРЬ) |
| 16. | Рычаг трения РУД | УСТАНОВИТЬ ЖЕЛАЕМОЕ |
| 17. | Переключатель выбора антенны связи | UPR (Верхняя) |
| Противоскользящая система и управление носовой стойкой шасси могут работать со сбоями во время передачи на нижнюю антенну из-за электромагнитных помех. | ||
| 18. | Переключатель противообледенения двигателя | NORMAL (Нормальный) |
| 19. | Противоскользящая система | ПРОВЕРИТЬ⚡ |
| a. Переключатель противоскользящей системы включён | Индикатор не горит | |
| b. Рычаг аварийного быстрого сброса | НАЖАТЬ/Индикатор горит И ОТПУСТИТЬ/Индикатор не горит | |
| c. Переключатель противоскользящей системы выключен | Индикатор горит | |
| 20. | Автоматический выключатель ARI | IN (ВКЛ) |
| 21. | Переключатель посадочного и рулёжного освещения | OFF (ВЫКЛ) |
| 22. | Индикатор положения предкрылков/закрылков | ВЫБРАННОЕ ПОЛОЖЕНИЕ |
| 23. | Индикаторы положения шасси | ПОКАЗАНИЯ ШАССИ ВЫПУЩЕНО |
| 24. | Рычаг управления аварийным тормозом | ВНУТРЬ И ЗАФИКСИРОВАТЬ |
| 25. | Ручка аварийного сброса фонаря | ВПЕРЁД |
| 26. | Панель управления многозарядным оружием | УСТАНОВИТЬ |
| a. Главный переключатель включения | SAFE (БЕЗОПАСНО) | |
| b. Ручка режима доставки | OFF (ВЫКЛ) | |
| c. Ручка выбора оружия | C | |
| d. Переключатель питания радиолокационных ракет | OFF (ВЫКЛ) | |
| e. Ручка селектора сброса | OFF (ВЫКЛ) | |
| f. Переключатель блокировки | IN (ВКЛ) | |
| g. Индикатор CL TK | ГОРИТ, ЕСЛИ УСТАНОВЛЕН ЦЕНТРАЛЬНЫЙ БАК | |
| 27. | Акселерометр | УСТАНОВИТЬ |
| 28. | Регулятор освещения пилотажных приборов | ПО НЕОБХОДИМОСТИ |
| 29. | Часы | ЗАВЕСТИ И УСТАНОВИТЬ |
| 30. | Сетка оптического прицела | ПРОВЕРИТЬ |
| 31. | Магазин плёнки/пылезащитный чехол | ЗАФИКСИРОВАТЬ |
| 32. | ADI | ПРОВЕРИТЬ И УСТАНОВИТЬ⚡ |
| a. Поверните ручку триммера тангажа, чтобы проверить ход (минимум от -10° до +5°) | ||
| b. Установите линию горизонта на одном уровне с миниатюрным самолётом | ||
| 33. | Аварийный авиагоризонт | ПРОВЕРИТЬ |
| a. Зафиксировать и не блокировать | ||
| b. Установить миниатюрный самолёт на одном уровне с линией горизонта | ||
| 34. | Панель выбора навигационной функции | УСТАНОВИТЬ |
| a. Переключатель выбора пеленга/расстояния | ПО ЖЕЛАНИЮ | |
| b. Ручка выбора режима | ПО ЖЕЛАНИЮ | |
| 35. | Индикаторы пожарной сигнализации | ПРОВЕРИТЬ |
| 36. | Ручка ручного разблокирования фонаря | ВПЕРЁД |
| 37. | Рычаг тормозного крюка | ВВЕРХ |
| 38. | Панель управления связью и навигацией | УСТАНОВИТЬ |
| a. Ручки управления частотой связи | ПО НЕОБХОДИМОСТИ | |
| b. Ручка управления каналом связи | ПО НЕОБХОДИМОСТИ | |
| c. Переключатель выбора режима | ПО НЕОБХОДИМОСТИ | |
| d. Ручка регулировки громкости связи | ПО ЖЕЛАНИЮ | |
| e. Ручка управления вспомогательным каналом | ПО НЕОБХОДИМОСТИ | |
| f. Ручка регулировки громкости Aux | ПО ЖЕЛАНИЮ | |
| g. Ручка выбора функции COMM | TR + G - ADF | |
| h. Ручки регулировки громкости навигации | ПО НЕОБХОДИМОСТИ | |
| i. TРучка выбора функции TACAN | OFF (ВЫКЛ) | |
| j. Командная кнопка связи | ПО ЖЕЛАНИЮ | |
| k. Командная кнопка навигации | ПО ЖЕЛАНИЮ | |
| 38. | Ручка аварийного выпуска воздуха | ВНУТРЬ |
| 40. | Переключатель удаления дождя | OFF (ВЫКЛ) |
| 41. | Обогрев ПВД | ПРОВЕРИТЬ ⚡ 🔧 |
| 42. | Рычаг управления обогревом/обдувом ног | ПО ЖЕЛАНИЮ |
| 43. | Переключатель функции режима IV IFF | ПО ЖЕЛАНИЮ |
| 44. | Главная ручка управления IFF | OFF (ВЫКЛ) |
| 45. | Автоматические выключатели | ПРОВЕРИТЬ |
| 46. | Панель регулировки температуры | |
| a. Ручка регулировки температуры | ПО ЖЕЛАНИЮ | |
| b. Переключатель выбора режима | AUTO (Автоматический) | |
| 47. | Панель управления-мониторинга бомб DCU-94/A | УСТАНОВИТЬ |
| a. Переключатели выбора станции | НАЗАД | |
| b. Переключатель блокировки основного сброса | НАЗАД | |
| c. Ручка выбора опции | OFF (ВЫКЛ) | |
| 48. | Ручка управления освещением кабины | ПО НЕОБХОДИМОСТИ |
| a. Переключатель белого прожектора | OFF (ВЫКЛ) | |
| b. Ручка управления освещением панели приборов | ПО НЕОБХОДИМОСТИ | |
| c. Ручка управления освещением консоли | ПО НЕОБХОДИМОСТИ | |
| d. Переключатель подсветки резервного компаса | ПО НЕОБХОДИМОСТИ | |
| e. Переключатель прожектора консоли | ПО НЕОБХОДИМОСТИ | |
| f. Ручка управления яркостью индикаторов | ПО НЕОБХОДИМОСТИ | |
| 49. | Сигнальные лампы и индикаторы | ПРОВЕРИТЬ⚡ |
| 50. | Прожекторы приборов | OFF (ВЫКЛ) |
| 51. | Громкость звукового предупреждения о сваливании | ПО ЖЕЛАНИЮ |
| 52. | Панель управления компасом | |
| a. Компенсатор широты | УСТАНОВИТЬ | |
| b. Ручка управления режимом | SLAVED (Привязанный) | |
| c. Индикатор синхронизации | ПРОВЕРИТЬ | |
| 53. | Панель управления внешним освещением | УСТАНОВИТЬ |
| a. Переключатель фюзеляжных огней | ПО НЕОБХОДИМОСТИ | |
| b. Переключатель огней крыльев | ПО НЕОБХОДИМОСТИ | |
| c. Переключатель огней крыльев | ПО НЕОБХОДИМОСТИ | |
| d. Переключатель мигания внешнего освещения | ПО НЕОБХОДИМОСТИ | |
| e. Ручка управления посадочными огнями | ПО НЕОБХОДИМОСТИ | |
| 54. | Панель регулировки интенсивности освещения приборов | УСТАНОВИТЬ |
| 55. | Система внутренней связи | ПРОВЕРИТЬ |
| 56. | Индикатор количества кислорода | ПРОВЕРИТЬ (нельзя выполнить при запуске от аккумулятора) |
| Проверьте, достаточно ли количества, не виден ли флажок OFF, индикатор OXYGEN LOW погашен. Нажмите кнопку тестирования кислорода и проверьте, что индикатор OXYGEN LOW и индикатор главного предупреждения загораются при 1 литре. Сообщите заднему члену экипажа, если применимо, что тест выполняется. | ||
| 57. | Система подачи кислорода | ПРОВЕРИТЬ И УСТАНОВИТЬ |
| 58. | Системы RWR | ПРОВЕРИТЬ, ЗАТЕМ ВЫКЛЮЧИТЬ⚡ |
| 59. | Индикатор катапультирования | ПРОВЕРИТЬ |
Запуск
💡 Если предпусковые процедуры были пропущены, экипаж должен помнить о том, чтобы надеть шлемы и подключить наземное питание (если не выполняется запуск от аккумулятора).
Перед запуском двигателей (оба)
| Шаг | Система | Действие |
|---|---|---|
| 1 | Штифты кресла | ПРОВЕРИТЬ, ЧТО СНЯТЫ И УБРАНЫ |
| 2 | Передняя и задняя зоны | СВОБОДНЫ |
| 3 | Противопожарный пост | ВЫСТАВЛЕН |
| 4 | РУДы | OFF |
Запуск двигателей (пилот)
| Шаг | Система | Действие |
|---|---|---|
| 1 | Внешний источник воздуха | ПОДКЛЮЧИТЬ ПРАВЫЙ🔧 |
| 2 | Главные переключатели двигателя | ON |
| 3 | Внешний поток воздуха | ON🔧 |
| 4 | При 10% оборотов двигателя | |
| a. Кнопка зажигания правого двигателя | НАЖАТЬ И УДЕРЖИВАТЬ | |
| b. Правый РУД | ПОЛОВИНА, ЗАТЕМ ХОЛОСТОЙ ХОД | |
| 5 | При запуске (EGT УВЕЛИЧИВАЕТСЯ) | |
| a. Кнопка зажигания правого двигателя | ОТПУСТИТЬ | |
| 6 | При 45% оборотов двигателя | |
| a. Внешний поток воздуха | ОСТАНОВИТЬ🔧 | |
| 7 | Проверить параметры | |
| a. Температура выхлопных газов | 220-420°C | |
| b. Индикатор расхода топлива | 800-1400 фунтов в час | |
| c. Обороты холостого хода | 65 ± 1% | |
| d. Правый насос наддува | 30 ± 5 фунтов на квадратный дюйм | |
| e. Давление масла | 12-50 фунтов на квадратный дюйм | |
| f. Гидравлическое давление | В ПРЕДЕЛАХ НОРМЫ | |
| 8 | Правый генератор | ON |
| 9 | Привод интерцептора | ПРОВЕРИТЬ (ЛЕВЫЙ)🔧 |
| 10 | Дверь дозаправки топливом в воздухе | ПРОВЕРИТЬ🔧 (при необходимости) |
| 11 | Левый двигатель | ЗАПУСТИТЬ ПО ШАГАМ 1-8 |
| 12 | Правый генератор | ВЫКЛЮЧИТЬ/ВКЛЮЧИТЬ |
| 13 | Индикатор разомкнутой соединительной шины | ВЫКЛ |
| 14 | Внешний воздух | ОТКЛЮЧИТЬ🔧 |
| 15 | Внешнее питание | ОТКЛЮЧИТЬ🔧 |
| 16 | Внутренняя проверка | ЗАВЕРШЕНА |
Руление
Перед рулением
Пилот
| Шаг | Система | Действие |
|---|---|---|
| 1 | Оборудование связи и навигации | ON и ПРОВЕРИТЬ |
| 2 | IFF | ОЖИДАНИЕ |
| 3 | Радиовысотомер | ON и ПРОВЕРИТЬ |
| 4 | Высотомер и SPC | УСТАНОВИТЬ и ПРОВЕРИТЬ |
| 5 | Воздушные тормоза | ПРОВЕРИТЬ🔧 |
| 6 | Предкрылки и закрылки | ПРОВЕРИТЬ🔧 |
| 7 | Органы управления полётом | ПРОВЕРИТЬ🔧 |
| 8 | Предкрылки и закрылки | NORM |
| 9 | Отключение ARI | ПРОВЕРИТЬ🔧 |
| 10 | Переключатели STAB AUG | ENGAGE и ПРОВЕРИТЬ🔧 |
| 11 | Выбор системы отсчёта | PRIM (INS в NAV) |
| 12 | Ручка управления режимом компаса | SYNC |
| 13 | AFCS | ПРОВЕРИТЬ (при необходимости) |
| 14 | Переключатели STAB AUG | DISENGAGE |
| 15 | Триммер | ПРОВЕРИТЬ🔧 и УСТАНОВИТЬ |
| 1-3 ЕДИНИЦЫ НА ПИКИРОВАНИЕ | ||
| 16 | Предкрылки и закрылки | OUT и DOWN🔧 |
| 17 | Оптический прицел | STBY/CAGE |
| 18 | Пневматическое давление | ПРОВЕРИТЬ |
| 19 | IFF | ПРОВЕРИТЬ |
| 20 | Радиовысотомер | ПРОВЕРИТЬ и УСТАНОВИТЬ |
| 21 | Колодки для колёс | СНЯТЬ🔧 |
🟡 ВНИМАНИЕ: Не перемещайте самолёт с INS в режиме ALIGN.
WSO
| Шаг | Система | Действие |
|---|---|---|
| 1 | Внутренняя проверка | ЗАВЕРШЕНА |
| 2 | Оборудование связи и навигации | ON и ПРОВЕРИТЬ |
| 3 | Целеуказатель | ВКЛЮЧИТЬ и УБРАТЬ |
| 4 | Проверки BIT радара | ЗАПУСТИТЬ |
| 5 | Проверки BIT WRCS | ЗАПУСТИТЬ |
| 6 | Режим навигационного компьютера | ПО ЖЕЛАНИЮ |
| 7 | Высотомер и SPC | УСТАНОВИТЬ и ПРОВЕРИТЬ |
Руление
| Шаг | Система | Действие |
|---|---|---|
| 1 | Колёсные тормоза | ПРОВЕРИТЬ |
| 2 | Управление носовой стойкой шасси | ВКЛЮЧИТЬ и ПРОВЕРИТЬ |
| 3 | (P-WSO) Пилотажные приборы | ПРОВЕРИТЬ |
| 4 | (P-WSO) Кислородный разбавитель | ПО ТРЕБОВАНИЮ |
🟡 ВНИМАНИЕ: Рулите с полностью открытыми или полностью закрытыми фонарями; с открытыми фонарями поддерживайте скорость руления ниже 60 узлов, чтобы предотвратить повреждение механизма управления фонарём.
🟡 ВНИМАНИЕ: Во время руления в строю необходимо соблюдать достаточное расстояние между самолётами. Открытый фонарь может быть повреждён выхлопными газами двигателя.
🟡 ВНИМАНИЕ: При рулении с большой массой радиус поворота следует увеличить, чтобы снять чрезмерные боковые нагрузки на стойки, колёса и шины основного шасси.
Взлёт
 Правый передний вид самолёта F-4 Phantom II, взлетающего с авиабазы Шираз во время учений Cento
Правый передний вид самолёта F-4 Phantom II, взлетающего с авиабазы Шираз во время учений Cento
Нормальный взлёт
Положение с выпущенными предкрылками и закрылками рекомендуется для всех взлётов. После выравнивания на взлётно-посадочной полосе и завершения необходимых предполётных проверок двигатели можно запустить до 85% оборотов с удерживаемыми тормозами и включённым управлением носовой стойкой шасси, чтобы обеспечить выравнивание носовой стойки шасси. При работе обоих двигателей на оборотах более 85% и заблокированных тормозах существует вероятность проворачивания шин на ободах колёс или юза шин. Проверьте нормальную реакцию оборотов двигателя и приблизительные показания 450°C EGT, 4000 фунтов в час расхода топлива, ¼ сопла и 30-40 фунтов на квадратный дюйм давления масла. После отпускания тормозов быстро переведите оба РУДа на полную военную тягу и проверьте обороты двигателя, температуру выхлопных газов и положение сопла. WSO проверяет, что клинья полностью убраны. Если требуется взлёт с форсажем, переведите РУДы в положение форсажа и переместите их полностью вперёд для максимальной тяги. Поддерживайте управление направлением с помощью управления носовой стойкой шасси или руля направления по мере необходимости. Руль направления становится эффективным для управления на скорости примерно 70 узлов. Колёсные тормоза не следует использовать для управления направлением во время разбега. Управление носовой стойкой шасси следует отключить, когда рулевое управление станет эффективным. Если на более высоких скоростях необходимо снова включить управление носовой стойкой шасси, педали руля направления следует вернуть в нейтральное положение перед включением, поскольку отклонение руля направления, необходимое для рулевого управления, обычно будет чрезмерным для управления носовой стойкой шасси. Достаточное усилие на ручку управления назад следует приложить до достижения скорости отрыва носового колеса, чтобы достичь желаемого угла тангажа. По мере подъёма носа угол тангажа необходимо контролировать, чтобы поддерживать угол 10°-12° (первая отметка тангажа) носом вверх для отрыва самолёта. Следует проявлять осторожность, чтобы предотвратить чрезмерное вращение из-за чрезмерной скорости перемещения ручки управления назад или увеличенный разбег из-за позднего отрыва. Основной угол взлёта следует удерживать во время ускорения и перехода в чистую конфигурацию. Изменение триммирования и управление в этот период являются нормальными. Индикаторы AUX AIR DOORS, WHEELS и MASTER CAUTION могут загораться на короткое время при уборке шасси и закрылков.
🟡 ВНИМАНИЕ: Быстрое полное перемещение ручки управления назад между скоростью взлёта и скоростью на 30 узлов ниже скорости взлёта может привести к удару стабилизатора о взлётно-посадочную полосу с возможным повреждением привода стабилизатора.
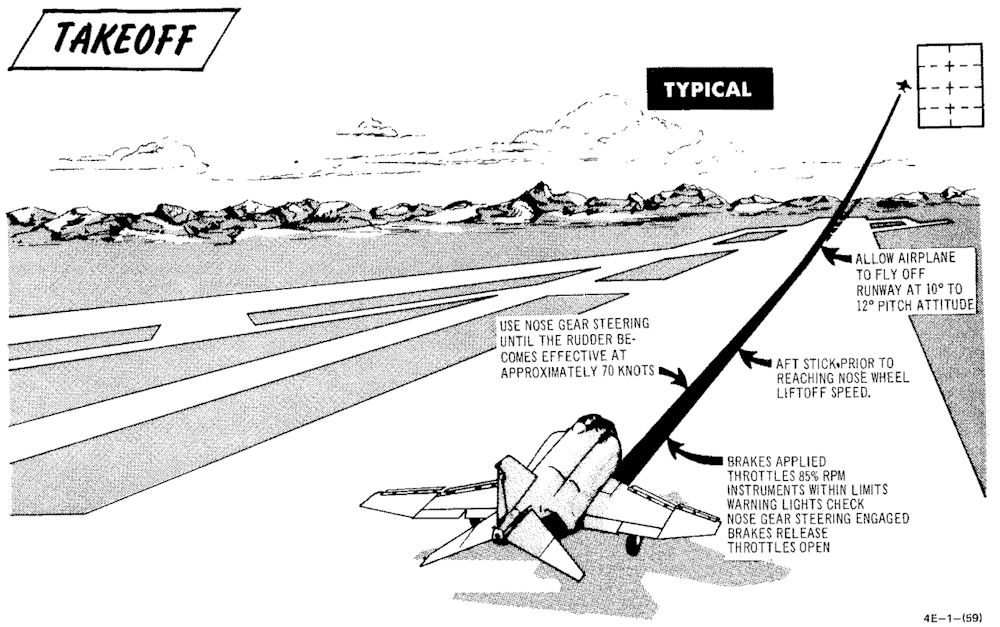
Взлёт без закрылков
Взлёт без закрылков не рекомендуется. Однако, если будет определено, что взлёт без закрылков должен быть выполнен для удовлетворения требований миссии, экипажи должны знать, что разбег и скорость взлёта будут увеличены, и: угол взлёта будет немного круче. Эффективность стабилизатора значительно увеличивается, и необходимо проявлять крайнюю осторожность, чтобы предотвратить чрезмерное вращение, которое может привести к удару стабилизатора о взлётно-посадочную полосу.
🔴 ПРЕДУПРЕЖДЕНИЕ: Из-за повышенной эффективности стабилизатора с убранными закрылками вращение самолёта может быть начато на более низких, чем обычно, скоростях, и чрезмерное вращение вполне возможно. Если кажется, что происходит чрезмерное вращение, необходимо предпринять положительное управляющее движение (ручка управления вперёд), чтобы предотвратить контакт стабилизатора со взлётно-посадочной полосой и/или потерю управления самолётом.
Взлёт с минимальным разбегом/большой массой
Взлёт с минимальным разбегом/большой массой (самолёт массой более 55 500 фунтов) выполняется так же, как и обычный взлёт, со следующими исключениями: Рекомендуется, чтобы все взлёты с минимальным разбегом/большой массой выполнялись с форсажем. Во время разбега ручку управления необходимо полностью отвести назад до достижения скорости 80 узлов. Когда самолёт начнёт вращаться, ручку управления следует отрегулировать, чтобы поддерживать угол тангажа 10°-12° для отрыва самолёта. Вероятность отказа шины основного шасси увеличивается при увеличении разбега на земле в условиях большой массы. Скорость отрыва носового колеса и скорость взлёта увеличиваются в условиях большой массы. В случае прерванного взлёта необходимо помнить, что тормозной путь значительно увеличивается по мере увеличения скорости прерывания.
🟡 ВНИМАНИЕ: При сочетании малой массы и заднего центра тяжести метод взлёта с минимальным разбегом (т.е. полное отклонение ручки управления назад до достижения скорости 80 узлов) приводит к быстрым скоростям тангажа во время вращения носа. Такая комбинация может существовать, когда радиолокационный комплекс и носовая пушка (или эквивалентный балласт) не установлены.
Взлёт при боковом ветре
При боковом ветре самолёт имеет тенденцию разворачиваться по ветру. Тенденцию к развороту по ветру можно легко контролировать с помощью управления носовой стойкой шасси. По мере увеличения скорости движения вперёд тенденция к развороту по ветру уменьшается. На скоростях выше 70 узлов эффективность руля направления обычно достаточна для поддержания управления направлением. После того, как нос будет поднят до угла взлёта, самолёт будет иметь тенденцию к сносу в сторону подветренной стороны взлётно-посадочной полосы. Поэтому, когда ожидается длительный период времени между отрывом носа и отрывом самолёта, или когда боковой ветер особенно сильный, отрыв носа можно соответствующим образом задержать. В нормальных условиях эксплуатации это действие не требуется. Когда самолёт отрывается от земли, его следует развернуть против ветра, крыльями горизонтально, чтобы поддерживать выравнивание со взлётно-посадочной полосой. Взлёт при порывистом боковом ветре или сильной турбулентности следа может привести к резкому крену крыла в момент отрыва или около него. Когда ожидаются такие условия, используйте скорость взлёта выше рассчитанной, чтобы обеспечить дополнительное поперечное управление после отрыва.
После взлёта
Когда самолёт точно оторвался от земли:
Уберите шасси. Убедитесь, что индикаторы положения шасси отображают слово UP, а сигнальная лампа на рычаге шасси не горит.
🟡 ВНИМАНИЕ: Шасси и створки шасси должны быть полностью убраны и зафиксированы до достижения предельной скорости шасси 250 узлов, в противном случае чрезмерные воздушные нагрузки могут повредить механизм шасси и предотвратить последующую работу.
Установите предкрылки и закрылки в положение NORM. Убедитесь, что индикаторы предкрылков/закрылков показывают IN и UP. При отклонении боковой ручки управления во время уборки закрылков могут возникать рывки руля направления. Если во время уборки предкрылков/закрылков слышен (заметный в наушниках) треск, связанный с колебаниями индикатора давления предкрылков/закрылков и вспомогательной гидравлики, поддерживайте воздушную скорость ниже 250 узлов и переключите предкрылки/закрылки. Если треск предкрылков возникает во время маневрирования на высоте, может потребоваться установить предкрылки в положение, противоположное тому, где возникает треск. Если треск не прекращается, выпустите предкрылки/закрылки и приземлитесь как можно скорее. Если переключение (изменение положения предкрылков) устраняет треск, продолжайте миссию и сделайте соответствующую запись в форме AF Form 781.
Набор высоты
Упрощённый набор высоты можно выполнить, поддерживая угол тангажа 10°-12° (первая отметка тангажа) носом вверх до достижения скорости 350 узлов, а затем изменяя тангаж по мере необходимости, чтобы поддерживать 350 узлов до достижения крейсерского числа Маха/TAS. Изменяйте тангаж по мере необходимости, чтобы поддерживать крейсерское число Маха/TAS до достижения крейсерской высоты. Упрощённый набор высоты на максимальной тяге при нормальной массе можно выполнить, поддерживая угол тангажа 10°-12° носом вверх до достижения скорости 350 узлов, а затем изменяя тангаж по мере необходимости, чтобы поддерживать 350 узлов до достижения числа Маха 0,9. Изменяйте угол тангажа по мере необходимости, чтобы поддерживать число Маха 0,9 до достижения крейсерской высоты.
💡 Во время набора высоты может потребоваться установить переключатель выбора антенны в положение LWR, чтобы поддерживать связь с землёй.
Проверка настройки
Проверку настройки следует выполнить, если есть подозрение на неправильную настройку или непреднамеренное асимметричное состояние нагрузки, а также перед маневрированием с максимальной производительностью/большим углом атаки. При включённых всех осях стабилизации отцентрируйте шарик в задней кабине и убедитесь, что самолёт не кренится более чем на 2°/секунду при нейтральном положении триммеров элеронов и интерцепторов. Если для предотвращения крена требуется большое количество поперечного триммирования (эквивалентно более чем 1 дюйму отклонения элерона вниз на скорости 350 узлов), существует неправильная настройка, неисправность стабилизации или асимметричное состояние нагрузки. Не маневрируйте с большим углом атаки, если существует это состояние.
Проверка стабилизации
Проверку стабилизации следует выполнить перед маневрированием с максимальной производительностью/большим углом атаки. Не выполняйте манёвры с максимальной производительностью, если какая-либо из следующих проверок не пройдена.
- Поднимите нос с ускорением 2 G и отпустите ручку управления. Самолёт должен стабилизироваться за один цикл.
- Разверните самолёт на ширину шарика и отпустите руль направления. Самолёт должен стабилизироваться за один цикл.
- Выполните крен до 30-45° и отпустите ручку управления. Самолёт должен поддерживать угол крена. Выполните крен до горизонтального полёта и отпустите ручку управления. Самолёт должен поддерживать горизонтальное положение крыльев.
- Постепенно увеличивайте угол атаки до 11 1/2 единиц и убедитесь, что предкрылки выпускаются вместе. Уменьшите угол атаки ниже 10 1/2 единиц и убедитесь, что предкрылки убираются вместе.
Контрольные списки взлёта
Перед взлётом (пилот)
| Шаг | Система | Действие |
|---|---|---|
| 1 | Оптический прицел | ПРОВЕРИТЬ |
| 2 | Перекачка топлива из внутренних баков крыла | NORMAL (НОРМАЛЬНО) |
| 3 | Переключатели STAB AUG | ENGAGE (ВКЛ) |
| 4 | Органы управления полётом | НЕ ОГРАНИЧЕНЫ (подтверждение WSO) |
| 5 | Предкрылки и закрылки | ПРОВЕРИТЬ, ЧТО ВЫПУЩЕНЫ (OUT & DOWN) |
| 6 | Противообледенение | ПО ТРЕБОВАНИЮ |
| 7 | Триммер STAB | ПРОВЕРИТЬ 1-3 ЕДИНИЦЫ НА ПИКИРОВАНИЕ |
| 8 | Количество топлива | ПРОВЕРИТЬ |
| 9 | (P-WSO) Фонари | ЗАКРЫТЬ и ПРОВЕРИТЬ (сначала WSO, затем пилот) |
| 10 | Сигнальные лампы | ТЕСТ |
| 11 | Противозапотевание и температура | ПО ТРЕБОВАНИЮ |
| 12 | (WSO) Селектор команд | КАК УКАЗАНО В ИНСТРУКТАЖЕ |
| 13 | (P-WSO) Катапультные кресла | ARM (неприменимо) |
После выравнивания на ВПП
| Шаг | Система | Действие |
|---|---|---|
| 1 | Внешняя перекачка | ПО ЖЕЛАНИЮ |
| 2 | Противоскользящая система | ON и ИНДИКАТОР НЕ ГОРИТ |
| 3 | Магнитный курс | ПРОВЕРИТЬ |
| 4 | Обогрев ПВД | ON |
| 5 | IFF | ПО ТРЕБОВАНИЮ |
| 6 | (P-WSO) Автоматические выключатели | ПРОВЕРИТЬ, ЧТО ВКЛЮЧЕНЫ |
| 7 | Сигнальные лампы | ПРОВЕРИТЬ |
Нормальный взлёт
| Шаг | Система | Действие |
|---|---|---|
| 1 | Колёсные тормоза | НАЖАТЬ |
| 2 | РУД | 85% ОБОРОТОВ ДВИГАТЕЛЯ МАКСИМУМ |
| 3 | Приборы двигателя | ПРОВЕРИТЬ |
| a. Температура выхлопных газов | 450°C | |
| b. Расход топлива | 4000 фунтов в час | |
| c. Сопла | 1/4 | |
| d. Давление масла | 30-40 фунтов на квадратный дюйм | |
| 4 | Колёсные тормоза | ОТПУСТИТЬ |
| 5 | РУД | MIL (Военная тяга) |
| 6 | Приборы двигателя | ПРОВЕРИТЬ |
| 7 | РУД | ФОРСАЖ (ПРИ НЕОБХОДИМОСТИ) |
| 8 | Управление носовой стойкой шасси | ОТКЛЮЧИТЬ на 70 УЗЛАХ |
| 9 | Ручка управления | ПЕРЕМЕСТИТЬ НАЗАД на 80 УЗЛАХ |
| 10 | Угол тангажа | ПОДДЕРЖИВАТЬ 10°-12° |
| 11 | Триммер | ПО ТРЕБОВАНИЮ |
После взлёта - набор высоты
| Шаг | Система | Действие |
|---|---|---|
| 1 | Шасси | UP (УБРАТЬ) |
| 2 | Предкрылки и закрылки | NORM (НОРМАЛЬНО) (МИНИМУМ 180 узлов) |
| 3 | Тангаж | РЕГУЛИРОВАТЬ 10°-12° ДО 350 KIAS |
| 4 | Воздушная скорость | РЕГУЛИРОВАТЬ ТАНГАЖ, ЧТОБЫ УДЕРЖИВАТЬ 350 KIAS |
| 5 | Курс | В СООТВЕТСТВИИ С ПЛАНОМ ПОЛЁТА |
Крейсерский полёт
| Шаг | Система | Действие |
|---|---|---|
| 1 | (P-WSO) Высотомеры | |
| УСТАНОВИТЬ | ||
| ПРОВЕРИТЬ РЕЗЕРВНЫЙ | ||
| СБРОСИТЬ | ||
| СРАВНИТЬ | ||
| 2 | Радиовысотомер | ПО ТРЕБОВАНИЮ |
| 3 | (WSO) Селектор команд | КАК УКАЗАНО В ИНСТРУКТАЖЕ |
| 4 | (P-WSO) Оперативная проверка | |
| a. Количество/давление/мигание кислорода | ПРОВЕРИТЬ | |
| b. Давление в кабине | ПРОВЕРИТЬ | |
| c. Количество топлива/переключатели перекачки | ПРОВЕРИТЬ | |
| d. Резервный компас | ПРОВЕРИТЬ | |
| e. Автоматические выключатели | ПРОВЕРИТЬ | |
| 5 | Переключатель противообледенения | ПО ТРЕБОВАНИЮ |
Посадка
В этой главе описываются методы посадки.
 Авиатор извлекает тормозной парашют из самолёта F-4E Phantom II 70-й тактической истребительной эскадрильи в конце взлётно-посадочной полосы во время учений PROUD PHANTOM'80
Авиатор извлекает тормозной парашют из самолёта F-4E Phantom II 70-й тактической истребительной эскадрильи в конце взлётно-посадочной полосы во время учений PROUD PHANTOM'80
Визуальная посадка
 Самолёт F-4 Phantom II резерва ВВС приземляется во время учений GUNSMOKE '85
Самолёт F-4 Phantom II резерва ВВС приземляется во время учений GUNSMOKE '85
Снижение/перед посадкой
Проверку снижения/перед посадкой следует выполнить на высоте более 10 000 футов над уровнем земли и в то время, когда требования миссии/полёта не являются критическими. Перед выполнением быстрого снижения поверхности лобового стекла и фонаря следует предварительно нагреть, чтобы предотвратить образование инея или тумана. Если во время снижения необходимо сбросить топливо, для обеспечения быстрого сброса в полёте может потребоваться установить тягу более 85% оборотов двигателя.
💡 Из-за ограниченной видимости вперёд рекомендуется поднять сиденье вверх перед входом в схему.
Техника посадки
Для нормальной посадки летите по схеме, показанной на рисунке. Входите в схему в соответствии с местными правилами.
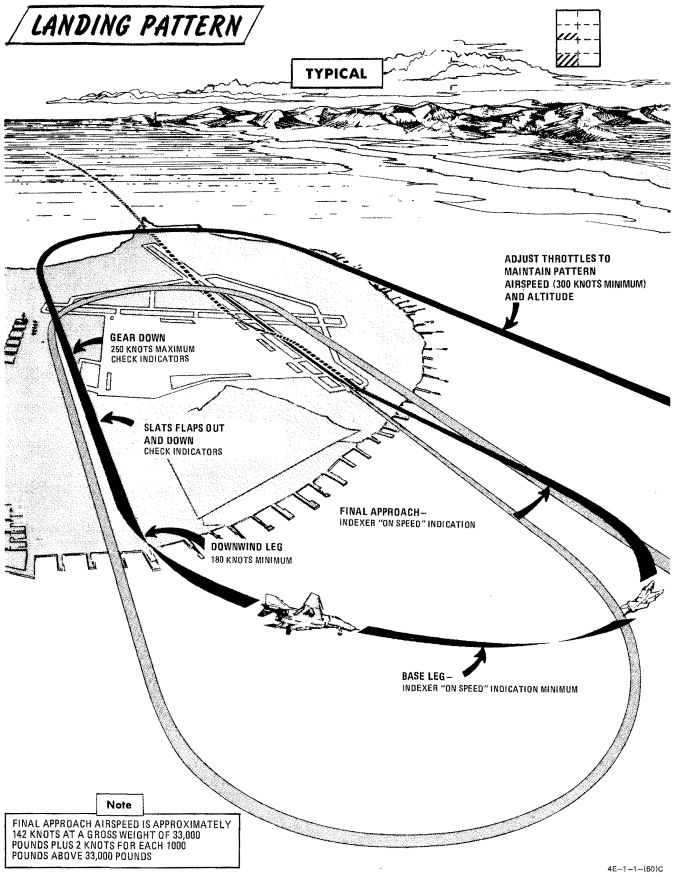
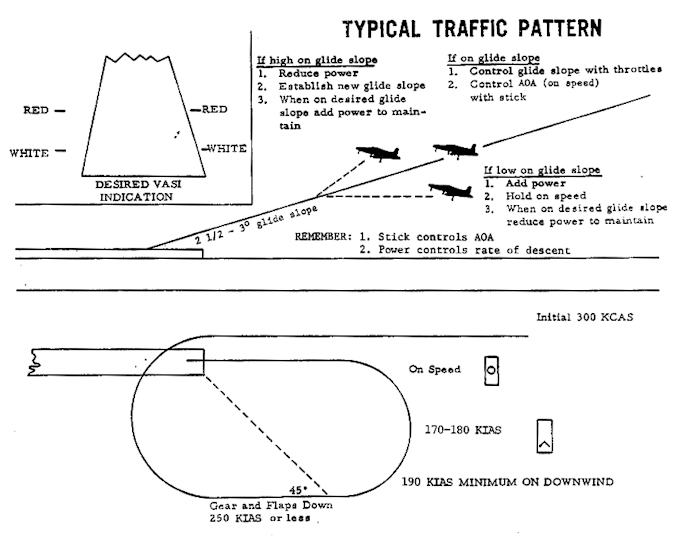
🔴 ПРЕДУПРЕЖДЕНИЕ: Если во время разворота на попутный курс возникают большие углы атаки, руль направления следует использовать в качестве основного средства выравнивания, поскольку использование элеронов может привести к возникновению обратного рыскания. Высоты может быть недостаточно для восстановления, если возникнет неуправляемый полёт.
Избегайте тряски во всей схеме посадки. Отрегулируйте тягу по мере необходимости, чтобы достичь допустимой воздушной скорости выпуска шасси. Выпустите шасси, предкрылки и закрылки в горизонтальном полёте на попутном курсе. Фактический выпуск закрылков может не произойти до замедления до 210 узлов. Убедитесь, что предкрылки и закрылки выпущены, прежде чем начинать разворот на предпосадочный курс. Оптимальный угол атаки для захода на посадку составляет 19,2 единицы и подходит для всех масс и нормальных конфигураций предкрылков/закрылков. Звуковая система угла атаки обеспечивает звуковой сигнал для поддержания захода на посадку на заданной скорости (воспроизводится постоянный тон средней высоты). В очень порывистых условиях полёта полного отклонения элеронов может быть недостаточно для коррекции крена. При посадке в порывистых условиях или при боковом ветре, в условиях турбулентности следа, с большим количеством топлива во внутренних баках (задний центр тяжести) или с ненормальной конфигурацией (предкрылки убраны, асимметричные предкрылки или частично выпущенные предкрылки) рекомендуется заход на посадку с углом атаки 17 единиц. Переход на заданную скорость и выравнивание перед касанием уменьшат скорость касания. Показания индикатора угла атаки и звуковые сигналы остаются неизменными. Установите и поддерживайте угол атаки на заданной скорости на предпосадочном курсе или финальном заходе на посадку, регулируя угол тангажа для поддержания угла атаки и тягу для поддержания желаемой глиссады/скорости снижения. Сверьте рассчитанную воздушную скорость и угол атаки на заданной скорости, чтобы выявить грубые ошибки в угле атаки. Когда самолёт достигнет высоты 20-30 футов над землёй, влияние земли будет иметь тенденцию разворачивать самолёт в направлении пикирования. Поддержание угла тангажа приведёт к переходу к немного медленной индикации при касании, что и требуется. Полёт по глиссаде 2,5°-3° обеспечит скорость снижения около 700 футов в минуту. Вертикальная скорость при касании будет заметно снижена за счёт влияния земли.
🟡 ВНИМАНИЕ: Полёт по более крутой, чем обычно, глиссаде или неподдержание угла тангажа при входе в зону влияния земли может привести к тому, что вертикальные скорости при касании превысят проектный предел стоек основного шасси.
При касании уменьшите тягу до холостого хода и выпустите тормозной парашют. Используйте полное отклонение ручки управления назад, чтобы помочь замедлиться. Используйте руль направления и элероны для управления направлением до скорости 70 узлов, затем используйте дифференциальное торможение. Управление носовой стойкой шасси не должно требоваться для управления направлением при слабом боковом ветре. Однако, если руль направления, элероны и/или дифференциальное торможение неэффективны для поддержания управления направлением, используйте управление носовой стойкой шасси по мере необходимости. Включайте управление носовой стойкой шасси только при нейтральном положении или близком к нейтральному положению педалей руля направления.
🔴 ПРЕДУПРЕЖДЕНИЕ: Неисправности управления носовой стойкой шасси могут привести к потере управления направлением, если оно включено на высокой скорости движения по земле; поэтому его не следует включать на скорости выше скорости руления, если только это не требуется для поддержания управления направлением в условиях посадки при боковом ветре. Если при включении управления носовой стойкой шасси не наблюдается никакой реакции или обнаружены незапланированные реакции рулевого управления, немедленно отключите его и не включайте снова.
Во время торможения цикличность работы противоскользящей системы можно обнаружить по изменению продольного замедления. Цикличность может быть незаметна при торможении на высокой скорости сразу после посадки, при отказе тормозного парашюта или на мокрой или обледенелой взлётно-посадочной полосе. Не интерпретируйте это ошибочно как отказ противоскользящей системы.
💡 Тормозной парашют не следует сбрасывать на взлётно-посадочной полосе или рулёжной дорожке. Популярный метод - оставить его сбоку от рулёжной дорожки, соответствующим образом ориентировав самолёт, надув парашют двигателями, а затем отпустив его в нужном направлении.
Посадка без закрылков
Посадка на короткую полосу
Посадка на короткую полосу требует точного соблюдения обычных процедур захода на посадку, и самолёт должен коснуться земли как можно ближе к концу взлётно-посадочной полосы, насколько это позволяет безопасность. Полное отклонение ручки управления назад на протяжении всего пробега увеличивает как аэродинамическое сопротивление, так и эффективность колёсных тормозов. Примените максимальное торможение, полностью нажав педали тормоза до упора, как только носовая стойка шасси коснётся земли, и управление носовой стойкой шасси будет включено. Управление носовой стойкой шасси следует использовать для поддержания выравнивания со взлётно-посадочной полосой и дополнять дифференциальным торможением только при необходимости.
Эксплуатация на алюминиевых матах AM-2 аналогична эксплуатации на бетонной взлётно-посадочной полосе эквивалентного размера. Зацепление следует рассматривать как аварийную процедуру. Однако, поскольку самолёт полностью пригоден для посадки с зацеплением, чрезвычайно неблагоприятные метеорологические или эксплуатационные условия могут оправдать рассмотрение вопроса о посадке с использованием подходящего тормозного устройства на ближнем конце взлётно-посадочной полосы.
Посадка при боковом ветре (сухая ВПП)
Тщательно компенсируйте боковой ветер в схеме движения, чтобы предотвратить недолёт или перелёт при финальном развороте. Выполняйте финальный заход на посадку с траекторией самолёта, правильно выровненной со взлётно-посадочной полосой. Боковой ветер можно компенсировать либо с помощью метода крена, либо метода «краба», либо комбинации этих двух методов. При использовании метода крена ARI можно пересилить с помощью педалей руля направления, или ARI можно отключить, вытащив автоматический выключатель цепи триммера руля направления. Если используется метод «краба», курс самолёта следует выровнять со взлётно-посадочной полосой непосредственно перед касанием. После касания используйте руль направления, элероны и интерцепторы, а также управление носовой стойкой шасси по мере необходимости для поддержания управления направлением. Влияние бокового ветра на самолёт не является сильным; однако руль направления, дифференциальное торможение и/или управление носовой стойкой шасси необходимо использовать по мере необходимости для поддержания выравнивания со взлётно-посадочной полосой. Использование тормозного парашюта усиливает эффект флюгера для любых условий выпуска. Эффект флюгера увеличивается по мере уменьшения скорости движения самолёта вперёд, поэтому, если тормозной парашют должен быть использован, его следует использовать в начальной, а не в конечной части пробега. Это также гарантирует использование тормозного парашюта в диапазоне скоростей, где он наиболее эффективен. Если тормозной парашют используется, и возникает чрезмерный эффект флюгера, сбросьте тормозной парашют. Поскольку носовая стойка шасси быстро займёт положение относительно педалей руля направления, управление носовой стойкой шасси следует запускать при нейтральном положении или близком к нейтральному положению педалей руля направления. По этой причине использование управления носовой стойкой шасси рекомендуется в начале пробега, а не в то время, когда требуется большое отклонение руля направления, чтобы удерживать самолёт выровненным на взлётно-посадочной полосе. Имейте в виду, что следует использовать только очень небольшие отклонения управления носовой стойкой шасси, так как существует высокий риск резкого отклонения управления носовой стойкой шасси. Наиболее важным аспектом управления направлением в условиях бокового ветра является поддержание точного выравнивания самолёта со взлётно-посадочной полосой, а не попытка вернуться к центральной линии взлётно-посадочной полосы после того, как он отклонился от неё.
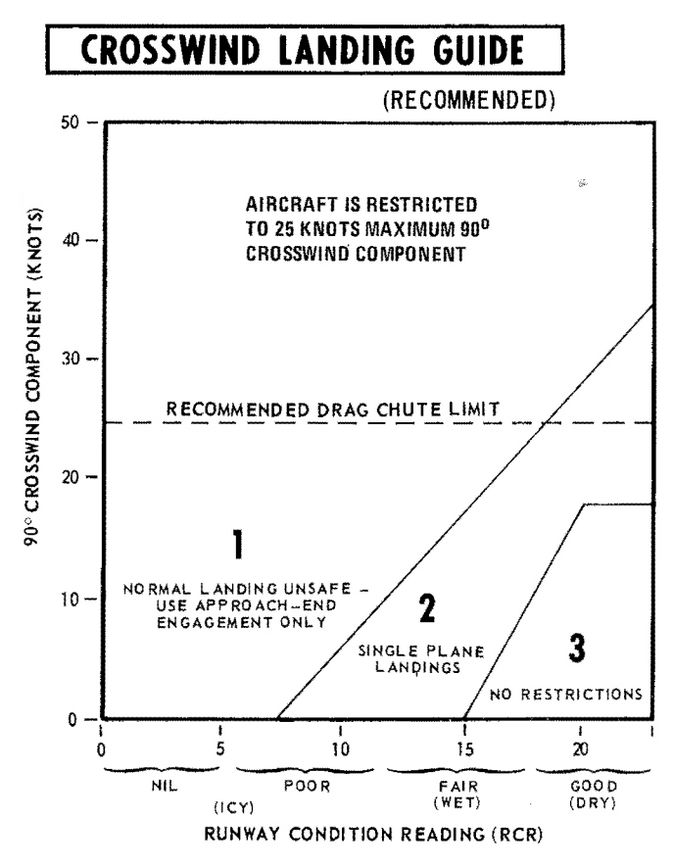
Посадка на мокрую или обледенелую ВПП
Мокрые или обледенелые условия взлётно-посадочной полосы создают серьёзные проблемы в управлении направлением и эффективности торможения. На мокрых взлётно-посадочных полосах эти проблемы в основном являются результатом аквапланирования, когда шина скользит по тонкому слою воды и создаёт небольшое сцепление или не создаёт его вообще. Вероятность аквапланирования увеличивается с увеличением глубины воды, увеличением скорости движения по земле, уменьшением давления в шинах и уменьшением глубины протектора шин, а также зависит от текстуры поверхности взлётно-посадочной полосы и конструкции протектора шин. Аквапланирование может происходить на взлётно-посадочных полосах, которые кажутся только влажными, если применить резкое торможение на высоких скоростях. Аквапланирование и гололёд создают практически те же проблемы. Из-за ограниченного управления направлением все посадки на мокрую или обледенелую взлётно-посадочную полосу следует выполнять с использованием техники для бокового ветра. Обратитесь к руководству по посадке при боковом ветре (рисунок 2-7), чтобы определить целесообразность зацепления на ближнем конце взлётно-посадочной полосы. Пилот также должен рассмотреть целесообразность отложить посадку, чтобы дать взлётно-посадочной полосе высохнуть, или перенаправить самолёт на другой аэродром. Массу следует уменьшить до минимально практичной. Спланируйте схему так, чтобы она была хорошо установлена на финальном этапе, при этом самолёт летит прямо по центральной линии взлётно-посадочной полосы с индикацией ON SPEED (НА ЗАДАННОЙ СКОРОСТИ). Используйте крен «краба» с горизонтальными крыльями, если это необходимо, чтобы поддерживать траекторию. Установите скорость снижения 800 футов в минуту (немного круче, чем обычно) и планируйте коснуться земли на центральной линии в пределах первых 500 футов. Выполните уверенное касание (500-600 футов в минуту), поддерживая крен «краба» с горизонтальными крыльями. Сразу после касания уменьшите тягу до холостого хода. Не пытайтесь выровнять курс самолёта со взлётно-посадочной полосой, так как это приведёт к сносу с взлётно-посадочной полосы, если самолёт скользит или аквапланирует. Удерживайте ручку управления полностью отклонённой назад, чтобы увеличить сцепление носового колеса. По мере того, как способность колёс поворачивать преодолеет аэродинамические эффекты, самолёт сам выровняется со взлётно-посадочной полосой. Не пытайтесь ускорить этот процесс. Когда курс самолёта будет выровнен с центральной линией взлётно-посадочной полосы, выпустите тормозной парашют. Будьте готовы сбросить тормозной парашют, если эффект флюгера мешает поддерживать траекторию прямо по центральной линии взлётно-посадочной полосы. Управление носовой стойкой шасси является основным методом управления направлением и должно использоваться как можно раньше. Управление носовой стойкой шасси следует включать только при нейтральном положении или близком к нейтральному положению педалей руля направления. Когда управление направлением будет надёжно установлено, используйте максимальное торможение с противоскользящей системой. Педали тормоза должны быть полностью нажаты, чтобы достичь максимального замедления. На высоких скоростях тормозной потенциал будет очень низким, и замедление будет практически не ощущаться. По мере увеличения тормозного потенциала с уменьшением скорости противоскользящая система будет соответственно увеличивать замедление. Если пилот не знаком с переменными тормозного потенциала, низкое замедление на высокой скорости может быть ошибочно интерпретировано как отказ тормозов или противоскользящей системы.
🟡 ВНИМАНИЕ: Отложения резины на последних 2000 футах мокрой взлётно-посадочной полосы делают управление направлением сложной проблемой даже на очень низких скоростях. Торможение следует начинать заблаговременно, чтобы не требовалось чрезмерного торможения на последнем участке взлётно-посадочной полосы.
Посадка с большой массой
Схема посадки с большой массой такая же, как и базовая схема, показанная на рисунке 2-6, за исключением того, что её следует немного расширить, чтобы компенсировать более низкую маневренность самолёта с большой массой на малых скоростях. Как и в обычной схеме, индикация заданной скорости на индикаторе обеспечит оптимальный угол атаки и воздушную скорость для самолёта в конфигурации посадки как для горизонтального полёта, так и для манёвренного полёта. Данные о воздушной скорости в зависимости от массы при угле атаки на заходе на посадку см. в разделе «Данные о производительности», приложение A.
Уход на второй круг
Любое решение об уходе на второй круг следует принимать как можно раньше. Когда принято решение об уходе на второй круг, плавно увеличьте тягу до военной (форсаж при необходимости). Не пытайтесь вращать нос или останавливать скорость снижения до тех пор, пока не будет набрана достаточная воздушная скорость. Продолжайте использовать индикацию заданной скорости как оптимальный угол атаки до тех пор, пока не будет достигнут горизонтальный полёт. По мере увеличения воздушной скорости установите нормальный угол взлёта, уберите шасси, когда будет установлена положительная скорость набора высоты, уберите предкрылки и закрылки на безопасной воздушной скорости (минимум 180 узлов) и уйдите на второй круг. Рывки руля направления могут возникать во время уборки закрылков при боковом отклонении ручки управления. Для замкнутой схемы выполните набор высоты на 180°, чтобы выйти на попутный курс на скорости 220-250 узлов. См. «Уход на второй круг», рисунок 2-8. Во время ухода на второй круг требуется быстрое изменение триммирования, чтобы предотвратить сильное усилие на ручку управления вперёд.
🔴 ПРЕДУПРЕЖДЕНИЕ: Не превышайте угол атаки 18 единиц во время ухода на второй круг с убранным шасси.
Касание и уход
После выполнения нормального захода на посадку и касания плавно увеличьте тягу до полной военной. Отклоните ручку управления назад, пока нос не повернётся на 10°-12° угла тангажа, поддерживая этот угол тангажа, пока самолёт не взлетит. Когда самолёт точно оторвался от земли, уберите шасси, а затем закрылки, когда самолёт разгонится до скорости не менее 180 узлов.
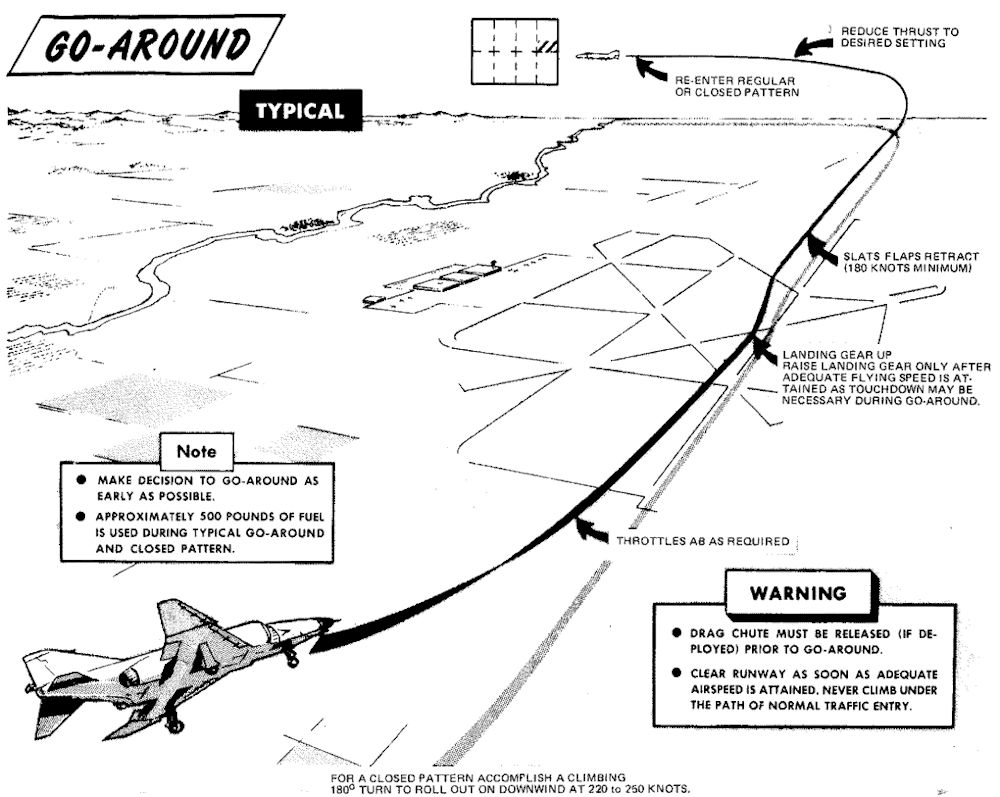
Инструментальный заход на посадку и посадка

Ожидание/патрулирование
Схемы ожидания или патрулирование можно выполнять на большинстве высот на скорости 280 узлов, используя крен около 30°.
Снижение по приборам
Эта схема представляет собой типичную схему пробивания облачности.
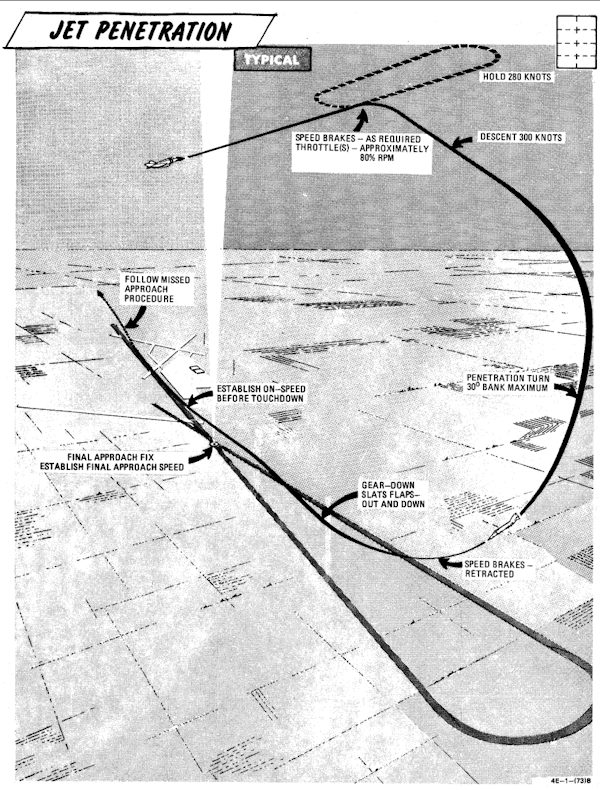
💡 Не уменьшайте тягу ниже 80% оборотов двигателя (85% на одном двигателе), чтобы обеспечить достаточную эффективность противозапотевания/удаления дождя с лобового стекла/противообледенения двигателя. Если РУД переведён на холостой ход при сильных осадках, может наблюдаться меньшее, чем обычно, значение оборотов холостого хода.
💡 Барометрический высотомер следует сверять с радиовысотомером, чтобы подтвердить безопасное расстояние до земли на малой высоте.
Точный заход на посадку
Эта схема представляет собой типичную схему пробивания облачности.
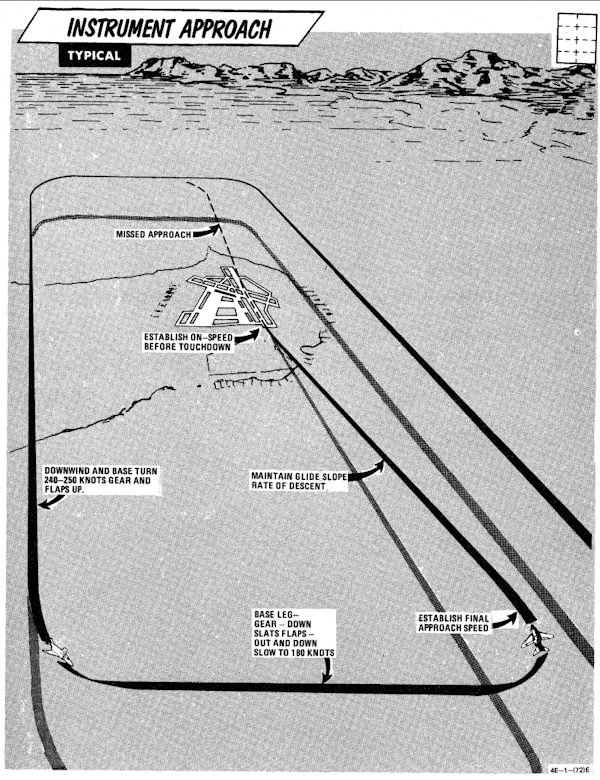
- Снижайтесь до высоты захвата GCA и переходите в конфигурацию посадки примерно в 10 милях от начала финального или предпосадочного этапа (в зависимости от ситуации).
- Поддерживайте минимальный угол атаки на заданной скорости.
Когда будет дана команда начать снижение:
- Уменьшите тягу примерно до 82-84% оборотов двигателя.
- Отрегулируйте тягу и тангаж по мере необходимости, чтобы поддерживать желаемую скорость снижения.
Прямое пробивание облачности по TACAN с последующим финальным заходом на посадку по GCA или ILS требует примерно 500-800 фунтов топлива. Прерванный заход на посадку с последующим вторым заходом на посадку по GCA требует дополнительных 1000 фунтов топлива.
Заход на посадку с кругом
Рекомендуемая воздушная скорость от точки фиксации финального захода на посадку по TACAN для захода на посадку с кругом по TACAN составляет 180 узлов с выпущенным шасси и закрылками.
Прерванный заход на посадку
- РУДы - MILITARY (Военная тяга)
- Шасси - UP (УБРАТЬ)
- Предкрылки/закрылки - NORM (НОРМАЛЬНО) (минимум 180 узлов)
- Тяга по мере необходимости для поддержания скорости 240-250 узлов и поддержания набора высоты 1500-2500 футов в минуту.
- Следуйте опубликованным процедурам прерванного захода на посадку.
Контрольные списки посадки
Снижение/перед посадкой
| Шаг | Система | Действие |
|---|---|---|
| 1 | Противозапотевание и температура | ПО ЖЕЛАНИЮ |
| 2 | Переключатель ALE-40 Flares/Norm | NORMAL (НОРМАЛЬНО) |
| 3 | Переключатели STAB AUG | ENGAGED (ВКЛ) |
| 4 | Переключатель выбора антенны связи | UPR (ВЕРХНЯЯ) |
| 5 | Посадочный/рулёжный огонь | LANDING (ПОСАДОЧНЫЙ) |
| 6 | Переключатели вооружения | OFF/SAFE/STOW (ВЫКЛ/БЕЗОПАСНО/УБРАТЬ) |
| 7 | Прицел | STBY/CAGE |
| 8 | Радиовысотомер и барометрический высотомер | УСТАНОВИТЬ |
| 9 | Топливо | ПРОВЕРИТЬ |
В схеме (ниже 210 узлов)
| Шаг | Система | Действие |
|---|---|---|
| 1 | Шасси | DOWN (ВЫПУСТИТЬ) |
| 2 | Предкрылки и закрылки | OUT & DOWN (ВЫПУЩЕНЫ) |
| 3 | Гидравлическое давление | ПРОВЕРИТЬ |
| 4 | Сигнальные лампы | ПРОВЕРИТЬ |
| 5 | Противоскользящая система | ON и ИНДИКАТОР НЕ ГОРИТ |
Прерванный заход на посадку
| Шаг | Система | Действие |
|---|---|---|
| 1 | РУДы | MILITARY (ВОЕННАЯ ТЯГА) или AB (ФОРСАЖ) |
| 2 | Шасси | UP (УБРАТЬ) |
| 3 | Предкрылки и закрылки | NORM (НОРМАЛЬНО) (МИНИМУМ 180 узлов) |
| 4 | РУДы | ПО ТРЕБОВАНИЮ |
Посадка
| Шаг | Система | Действие |
|---|---|---|
| 1 | Над ВПП | Плавно выровнять |
| 2 | При касании | РУДы на ХОЛОСТОЙ ХОД |
| 3 | Тормозной парашют | ВЫПУСТИТЬ |
| 4 | Колёсный тормоз (ниже 70 узлов) | ВКЛЮЧИТЬ |
После посадки
| Шаг | Система | Действие |
|---|---|---|
| 1 | Противоскользящая система (ниже 30 узлов) | OFF |
| 2 | Давление в кабине | ПРОВЕРИТЬ |
| 3 | Ручка катапультирования | SAFE (неприменимо) |
| 4 | Посадочный/рулёжный огонь | ПО ТРЕБОВАНИЮ |
| 5 | Предкрылки и закрылки | NORM (НОРМАЛЬНО) |
| 6 | Тормозной парашют | СБРОСИТЬ |
| 7 | Режим 4 Sel | HOLD (УДЕРЖАНИЕ) |
| 8 | ECM/ALE/RWR/APX-76 | OFF |
| 9 | Радар/питание CW | OFF |
| 10 | Переключатели STAB AUG | OFF |
| 11 | Сброс топлива из внутренних баков крыла | NORMAL (НОРМАЛЬНО) |
| 12 | Панель управления VOR/ILS | OFF |
| 13 | Противообледенение двигателя | NORMAL (НОРМАЛЬНО) |
| 14 | Радиовысотомер | OFF |
| 15 | Триммер STAB | 1-3 единицы НА ПИКИРОВАНИЕ |
| 16 | Переключатель выбора отсчёта | STBY |
| 17 | Удаление дождя | OFF |
| 18 | Обогрев ПВД | OFF |
| 19 | IFF | OFF |
| 20 | Температура | FULL HOT (ПОЛНЫЙ НАГРЕВ) |
| 21 | Ручка противозапотевания | DEFOG (ПРОТИВОЗАПОТЕВАНИЕ) |
| 22 | TACAN | OFF |
| 23 | Посадочные огни | OFF |
| 24 | Затвор прицела | CLOSED (ЗАКРЫТ) |
Выключение
Выключение двигателя (пилот)
| Шаг | Система | Действие |
|---|---|---|
| 1 | Колёса | ЗАФИКСИРОВАНЫ КОЛОДКАМИ🔧 |
| 2 | Радиостанция UHF | OFF |
| 3 | Катапультное кресло | ПОДНЯТЬ |
| 4 | Противозапотевание/обогрев ног | ПОЛНОСТЬЮ НАЗАД |
| 5 | Температура | 12 ЧАСОВ |
| 6 | Переключатель дозаправки топливом в воздухе | EXTEND, если дозаправка топливом в воздухе была выполнена |
| 7 | Правый РУД | OFF |
| 8 | Лента AVTR | ИЗВЛЕЧЬ |
| 9 | Привод интерцептора | ПРОВЕРИТЬ (ПРАВЫЙ)🔧 |
| 10 | Левый РУД | OFF |
| 11 | Главные переключатели двигателя | OFF |
Выключение двигателя (WSO)
| Шаг | Система | Действие |
|---|---|---|
| 1 | Радиостанция UHF | OFF |
| 2 | Катапультное кресло | ПОДНЯТЬ |
| 3 | INS | OFF |
| 4 | Навигационный компьютер | OFF |
| 5 | Целеуказатель | OFF |
Перед тем, как покинуть кабину
| Шаг | Система | Действие |
|---|---|---|
| 1 | (P-WSO) Все переключатели и органы управления | OFF |
| 2 | (P-WSO) Кислородный разбавитель | 100% |
Специальные процедуры
Эта подглава содержит специальные процедуры для эксплуатации F-4E Phantom II.
 Пилоты бегут к своим самолётам F-4 Phantom II, находящимся в боевой готовности, во время учений William Tell '80
Пилоты бегут к своим самолётам F-4 Phantom II, находящимся в боевой готовности, во время учений William Tell '80
Запуск от патрона
Эта процедура основана на том, что внешнее питание недоступно. Во время штатных запусков от патрона (кроме срочных вылетов/учений) рекомендуется использовать внешнее электропитание, если оно доступно, так как это позволит использовать CNI, цепи предупреждения о пожаре и перегреве, а также все приборы двигателя во время запуска. Если используется внешнее питание, следует использовать обычное переключение генератора. Чтобы избежать возможного раздражения, вызванного дымом/газами выхлопа патрона, может быть целесообразно закрыть фонари и выбрать 100% кислород во время цикла запуска.
🔴 ПРЕДУПРЕЖДЕНИЕ: Никогда не пытайтесь загружать или выгружать патрон в любой из стартеров при включённых главных переключателях двигателя, включённом переключателе заправки топливом на земле или подключённом внешнем электропитании. Если произойдёт сбой в цепях безопасности, это может привести к серьёзным травмам.
| Шаг | Система | Действие |
|---|---|---|
| 1 | Главные переключатели двигателя | ON |
| 2 | Переключатель правого генератора | GEN ON |
| 3 | Кнопка зажигания | НАЖАТЬ И УДЕРЖИВАТЬ |
| 4 | РУД | ПОЛОВИНА, ЗАТЕМ ХОЛОСТОЙ ХОД |
| 5 | Переключатель запуска двигателя | R (правый) |
| 6 | При запуске (EGT УВЕЛИЧИВАЕТСЯ) | |
| Кнопка зажигания | ОТПУСТИТЬ | |
| 7 | Проверить параметры | |
| a. Температура выхлопных газов | 220-420°C | |
| b. Обороты холостого хода | 65 ± 1% | |
| c. Правый насос наддува | 30 ± 5 фунтов на квадратный дюйм | |
| d. Давление масла | 12-50 фунтов на квадратный дюйм | |
| e. Индикатор расхода топлива | 800-1400 фунтов в час | |
| f. Гидравлическое давление | В ПРЕДЕЛАХ НОРМЫ | |
| 8 | Привод интерцептора | ПРОВЕРИТЬ (ЛЕВЫЙ)🔧 |
| 9 | Дверь дозаправки топливом в воздухе | ПРОВЕРИТЬ🔧 (при необходимости) |
| 10 | Левый двигатель | ЗАПУСТИТЬ ПО ШАГАМ 1-7 |
| 11 | Левый генератор | ON |
| 12 | Правый генератор | ВЫКЛЮЧИТЬ/ВКЛЮЧИТЬ |
| 13 | Индикатор разомкнутой соединительной шины | ВЫКЛ |
| 14 | Внутренняя проверка | ЗАВЕРШЕНА |
Руление на одном двигателе
При необходимости левый двигатель можно выключить первым.
| Шаг | Система | Действие |
|---|---|---|
| 1 | Переключатель правого генератора | OFF |
| 2 | Индикатор BUS TIE OPEN | OFF |
| 3 | Давление вспомогательной гидравлики | В ПРЕДЕЛАХ НОРМЫ |
| 4 | РУД правого двигателя | OFF |
Горячая заправка
Перед заправкой:
| Шаг | Система | Действие |
|---|---|---|
| 1 | Процедуры руления на одном двигателе | ЗАВЕРШЕНО |
| 2 | Переключатель перекачки топлива из внутренних баков крыла | NORMAL (НОРМАЛЬНО) |
| 3 | Переключатель внешней перекачки | OFF |
| 4 | Переключатель дозаправки топливом в воздухе | EXTEND |
| 4 | После входа в зону горячей заправки установите голосовую связь (внутренняя связь с пилотом и руководителем заправки). | |
| 5 | Переключатель выбора дозаправки | ПО ЖЕЛАНИЮ |
Во время заправки:
| Шаг | Система | Действие |
|---|---|---|
| 1 | Будьте внимательны ко всем визуальным и голосовым сигналам руководителя заправки. | |
| 2 | Контролируйте частоту наземного управления. |
После заправки:
| Шаг | Система | Действие |
|---|---|---|
| 1 | Переключатель дозаправки топливом в воздухе | RETRACT |
| 2 | Переключатель выбора дозаправки | INT ONLY |
Срочный вылет
Следующие процедуры срочного вылета предполагают, что следующие действия были выполнены до того, как самолёт был приведён в состояние боевой готовности (подлежит действиям срочного вылета):
- Выполните предполётный осмотр, включая осмотр кабины с включённым питанием, проверку работоспособности двигателя и проверку работоспособности воздушных тормозов, закрылков, органов управления полётом и стабилизации в соответствии с обычными проверками ПЕРЕД РУЛЕНИЕМ (ПЕРЕДНЯЯ КАБИНА).
- INS выровнен и находится в режиме памяти курса.
- Самолёт подготовлен к срочному вылету в соответствии с местными правилами и инструкциями.
Если вышеуказанные действия не выполнены до срочного вылета, следует использовать обычную процедуру.
Перед рулением (передняя кабина)
| Шаг | Система | Действие |
|---|---|---|
| 1 | Оборудование связи и навигации | ON и ПРОВЕРИТЬ |
| 2 | Аварийный авиагоризонт | УСТАНОВИТЬ |
| 3 | Высотомер и SPC | УСТАНОВИТЬ и ПРОВЕРИТЬ |
| 4 | Триммер взлёта | ПРОВЕРИТЬ |
| 5 | Предкрылки/закрылки | OUT и DOWN🔧 |
| 6 | Разрешение на руление от WSO | |
| 7 | Селектор системы отсчёта | PRIM |
| 8 | Штифты кресла | ПРОВЕРИТЬ, ЧТО СНЯТЫ И УБРАНЫ |
| 9 | Личное снаряжение | ПРОВЕРИТЬ |
| 10 | Колодки для колёс | СНЯТЬ🔧 |
Перед рулением (задняя кабина)
| Шаг | Описание | Действие |
|---|---|---|
| 1 | Оборудование связи и навигации | ON и ПРОВЕРИТЬ |
| 2 | Переключатель режима APX-80 | PASSIVE/OFF |
| 3 | Барометрический высотомер | УСТАНОВИТЬ и ПРОВЕРИТЬ |
| 4 | Питание радара | STBY |
| 5 | Индикатор перегрева радара | OFF, КОНТРОЛИРОВАТЬ |
| 6 | Режим навигационного компьютера | STBY |
| 7 | Выравнивание по памяти курса | ЗАВЕРШЕНО |
| Если инерциальная навигационная система ранее не была выровнена для памяти курса, отсчёт ориентации можно получить, выполнив грубое выравнивание (ALIGN - подождите 40 секунд - NAV). | ||
| 8 | Режим навигационного компьютера | ПО ЖЕЛАНИЮ |
| 9 | Штифты кресла | ПРОВЕРИТЬ, ЧТО СНЯТЫ И УБРАНЫ |
| 10 | Личное снаряжение | ПРОВЕРИТЬ |
| 11 | Уведомить пилота | РАЗРЕШЕНИЕ НА РУЛЕНИЕ |
Перед взлётом
| Шаг | Описание | Действие |
|---|---|---|
| 1 | Пилотажные приборы | ПРОВЕРИТЬ и УСТАНОВИТЬ |
| 2 | Переключатели стабилизации | ENGAGE (ВКЛ) |
| 3 | Органы управления полётом | НЕ ОГРАНИЧЕНЫ (WSO визуально проверяет элероны и интерцепторы) |
| 4 | (P-WSO) Фонари | ЗАКРЫТЬ и ПРОВЕРИТЬ |
| 13 | (WSO) Селекторный клапан команд | КАК УКАЗАНО В ИНСТРУКТАЖЕ |
| 5 | (P-WSO) Защитные кожухи нижней ручки катапультирования | СНЯТЬ (неприменимо) |
| 6 | Панель топлива | УСТАНОВИТЬ и ПРОВЕРИТЬ |
| a. Перекачка топлива из внутренних баков крыла | NORMAL (НОРМАЛЬНО) | |
| b. Внешняя перекачка | ПО ТРЕБОВАНИЮ | |
| 7 | Предкрылки/закрылки | ПРОВЕРИТЬ, ЧТО ВЫПУЩЕНЫ (OUT AND DOWN) |
| 8 | Противоскользящая система | ON; ИНДИКАТОР НЕ ГОРИТ |
| 9 | Сигнальные лампы | ПРОВЕРЕНЫ |
| 10 | Противообледенение | ПО ТРЕБОВАНИЮ |
| 10 | Обогрев ПВД | ON |
| 11 | IFF | ПО ТРЕБОВАНИЮ |
| 14 | (P-WSO) Автоматические выключатели | ПРОВЕРИТЬ |
Ракета AIM-7
Настройка AIM-7E
| Шаг | Система | Действие |
|---|---|---|
| 1. | Переключатель питания ракет радара | CW ON (Непрерывные волны ВКЛ) |
| a. Индикаторы настроенных ракет RDR | Гореть 4 минуты | |
| 2. | Переключатель питания ракет радара | STBY (Ожидание) |
| a. Индикаторы настроенных ракет RDR | OFF (ВЫКЛ) |
Настройка AIM-7F
| Шаг | Система | Действие |
|---|---|---|
| 1. | Переключатель питания ракет радара | CW OFF в течение 1 минуты (Непрерывные волны ВЫКЛ) |
| 2. | Переключатель питания ракет радара | CW ON (Непрерывные волны ВКЛ) |
| a. Индикаторы настроенных ракет RDR | ON (ВКЛ) | |
| 3. | Переключатель питания ракет радара | STBY (Ожидание) |
| a. Индикаторы настроенных ракет RDR | Остаются ВКЛ |
Запуск AIM-7
WSO
| Шаг | Система | Действие |
|---|---|---|
| 1. | Питание радара | OPR (Работа) |
| 2. | Режим радара | RDR, MAP-B или BST |
| 3. | Переключатель поляризации | LIN или CIR 1 |
| 4. | Ручка Aspect | По необходимости |
| 5. | Переключатель манёвров | По необходимости |
| 6. | Переключатель стабилизации | По необходимости |
Пилот
| Шаг | Система | Действие |
|---|---|---|
| 1. | Переключатель питания ракет радара | CW ON (Непрерывные волны ВКЛ) |
| a. Индикаторы настроенных ракет RDR | ON (ВКЛ) | |
| 2. | Переключатель блокировки ракет | По необходимости |
| 3. | Режим прицела | A/A (Воздух-воздух) |
| 4. | Переключатель пушка/ракета | HEAT (Тепловая) (или по необходимости) |
| a. Индикатор RADAR на ИЛС | ON (ВКЛ) | |
| 5. | Главное включение вооружения (MASTER ARM) | ON (ВКЛ) |
| a. Индикатор ARM на ИЛС | ON (ВКЛ) | |
| 6. | Захват цели | Выполнить |
| Для режима ACM: | ||
| a. Кнопка CAGE | НАЖАТЬ | |
| b. Выровнять цель по линии визирования | ||
| c. Кнопка управления носовым колесом | НАЖАТЬ для выполнения захвата CAA | |
| 7. | Переключатель пушка/ракета | RADAR |
| 8. | Индикаторы IN-RANGE | ON (ВКЛ) |
| 9. | Индикаторы SHOOT | ON (ВКЛ) |
| 10. | Спусковой крючок | Нажать и отпустить |
Ракета AIM-9
Запуск AIM-9
Пилот
| Шаг | Система | Действие |
|---|---|---|
| 1. | Режим прицела | A/A (Воздух-воздух) |
| 2. | Переключатель пушка/ракета | HEAT (Тепловая) |
| a. Индикатор HEAT на ИЛС | ON (ВКЛ) | |
| 3. | Звуковой сигнал ракеты | Настроить |
| 4. | Главное включение вооружения (MASTER ARM) | ARM (ВКЛ) |
| a. Индикатор ARM на ИЛС | ON (ВКЛ) | |
| 5. | Разблокировать ГСН | |
| a. Кнопка ARR | Нажать и удерживать | |
| b. ПРИМЕЧАНИЕ: ГСН разблокирована только пока нажата и удерживается кнопка ARR | ON (ВКЛ) | |
| 6. | Индикаторы SHOOT | Мигают |
| 7. | Спусковой крючок | Нажать и отпустить |
Пилот в режиме ACM
| Шаг | Система | Действие |
|---|---|---|
| 1. | Режим прицела | A/A (Воздух-воздух) |
| 2. | Переключатель пушка/ракета | HEAT (Тепловая) |
| a. Индикатор HEAT на ИЛС | ON (ВКЛ) | |
| 3. | Звуковой сигнал ракеты | Настроить |
| 4. | Главное включение вооружения (MASTER ARM) | ARM (ВКЛ) |
| a. Индикатор ARM на ИЛС | ON (ВКЛ) | |
| 5. | Выполнить захват радаром | |
| a. Кнопка CAGE | Нажать | |
| b. Совместить цель в режиме визирования | ||
| c. Кнопка управления носовым колесом | Нажать для выполнения захвата CAA | |
| 5. | Разблокировать ГСН | |
| a. Кнопка ARR | Нажать и удерживать | |
| b. ПРИМЕЧАНИЕ: ГСН разблокирована только пока нажата и удерживается кнопка ARR | ON (ВКЛ) | |
| 6. | Индикаторы SHOOT | Мигают |
| 7. | Спусковой крючок | Нажать и отпустить |
Носовая пушка M61A1 и SUU-23
Пилот
| Шаг | Система | Действие |
|---|---|---|
| 1 | Режим прицела | Воздух-земля или воздух-воздух по требованию |
| 2 | Ручка снижения сетки | УСТАНОВИТЬ (только воздух-земля) |
| 3 | Переключатель темпа стрельбы | ВЫСОКИЙ/НИЗКИЙ |
| 4 | Ручка выбора режима доставки | OFF |
| 5 | Ручка выбора оружия | Не TV или ARM |
| 6 | Кнопки выбора станции | GUN |
| Для пушечных контейнеров: | ||
| a. Кнопки выбора станции | ВЫБРАТЬ СТАНЦИИ | |
| 7 | Для воздух-воздух: | |
| b. Переключатель пушка/ракета | GUN | |
| 8 | Спусковой крючок | Нажать |
Ракета AGM-45
Настройка AGM-45
| Шаг | Система | Действие |
|---|---|---|
| 1 | (WSO) Режим INS | NAV |
| 2 | Режим прицела | Воздух-земля |
| 3 | (WSO) Таймер бомбометания | УСТАНОВИТЬ |
| a. Таймер набора высоты | УСТАНОВИТЬ | |
| 4 | (WSO) Угол сброса | УСТАНОВИТЬ |
| a. Малый угол (LOFT) | УСТАНОВИТЬ | |
| 5 | (WSO) Входные данные WRCS | УСТАНОВИТЬ |
| a. Высота цели | УСТАНОВИТЬ | |
| b. Упреждение сброса | УСТАНОВИТЬ | |
| 6 | Режим доставки | УСТАНОВИТЬ |
| a. Режим WRCS | AGM-45 | |
| b. Режим AN/AJB-7 | LOFT | |
| c. Режим Direct | DIRECT | |
| 7 | Главное включение вооружения (MASTER ARM) | SAFE |
| 8 | Выбор оружия | ARM |
| 9 | Кнопки выбора станции | ВЫБРАТЬ СТАНЦИЮ |
| 10 | Переключатель сброса | УСТАНОВИТЬ |
| a. Режим WRCS | DF REJ | |
| b. Режим LOFT | NORM |
AGM-45 Launch
| Шаг | Система | Действие |
|---|---|---|
| 1 | Главный переключатель включения вооружения (MASTER ARM SWITCH) | ARM |
| 2 | Вертикальный указатель директора ADI | НУЛЬ |
| 3 | Кнопка "Бомба" | НАЖАТЬ |
Ракета AGM-65
Настройка AGM-65
| Шаг | Система | Действие |
|---|---|---|
| 1 | Оптический прицел | УСТАНОВИТЬ |
| a. Режим прицела | A/G (Воздух-земля) | |
| b. Снижение сетки | 45 мил | |
| 2 | Ручка выбора оружия | TV |
| 3 | Ручка выбора режима доставки | Прямой сброс (DIRECT) |
| 4 | Кнопка выбора станции | Выбрать станцию |
| (3 минуты прогрева) | ||
| 5 | (WSO) Режим экрана ЦУПР | Телевидение или ожидание |
| 6 | (P) Видео с оружия (нажать на спусковой крючок) | ВКЛ |
Пилот
| Шаг | Система | Действие |
|---|---|---|
| 1 | Положение визирной марки | Над целью |
| 2 | Кнопка ARR | Нажать и удерживать |
| 3 | ГСН | Переместить над целью |
| 4 | Кнопка ARR | Отпустить, чтобы захватить цель |
| 5 | (P или WSO) Кнопка "Бомба" | Нажать и удерживать |
| 6 | Для следующей ракеты | Повторить шаги 2-5 |
WSO
| Шаг | Система | Действие |
|---|---|---|
| 1 | Переключатель действия | Полунажатие |
| 2 | ГСН | Переместить над целью |
| 3 | Переключатель действия | FПолное нажатие/отпустить, чтобы захватить цель |
| 4 | (P или WSO) Кнопка "Бомба" | Нажать и удерживать |
| 5 | Для следующей ракеты | Повторить шаги 2-4 |
AGM-12 Bullpup
Запуск AGM-12 Bullpup
| Шаг | Система | Действие |
|---|---|---|
| 1 | Оптический прицел | УСТАНОВИТЬ |
| a. Режим прицела | A/G (Воздух-земля) | |
| 2 | Ручка выбора оружия | AGM-12 |
| 3 | Ручка выбора режима доставки | Прямой сброс (DIRECT) |
| 4 | Кнопка выбора станции | ВЫБРАТЬ СТАНЦИЮ |
| 5 | Положение визирной марки | Над целью |
| 6 | Кнопка "Бомба" | Нажать и удерживать |
| 7 | ПОСЛЕ ЗАПУСКА РАКЕТЫ | Наводить на цель с помощью ручного управления |
Бомбы с ЭО-наведением
Подготовка GBU-8 HOBOS и AGM-62 Walleye 1/2
| Шаг | Система | Действие |
|---|---|---|
| 1 | Оптический прицел | УСТАНОВИТЬ |
| a. Режим прицела | Воздух-земля | |
| b. Снижение сетки | 17 мил | |
| 2 | Ручка выбора оружия | TV |
| 3 | Ручка выбора режима доставки | Прямой сброс (DIRECT) |
| 4 | Кнопка выбора станции | Выбрать станцию |
| (3 минуты прогрева) | ||
| 5 | (WSO) Режим экрана ЦУПР | Телевидение или ожидание |
| 6 | (P) Видео с оружия | ВКЛ |
Запуск
| Шаг | Система | Действие |
|---|---|---|
| 1 | Положение визирной марки | Над целью |
| 2 | Спусковой крючок | Первая ступень и удерживать до сброса |
| 3 | Кнопка "Бомба" | Нажать и удерживать до сброса |
| 4 | Для следующей ракеты | Повторить шаги 2 и 3 |
Процедуры бомбометания
В F-4E есть разные режимы бомбометания, в следующей главе вы можете найти процедуры для разных режимов.
Сброс бомб - Direct (Прямой сброс)
| Шаг | Система | Действие |
|---|---|---|
| 1 | Оптический прицел | УСТАНОВИТЬ |
| a. Режим прицела | A/G (Воздух-земля) | |
| b. Ручка снижения сетки | УСТАНОВИТЬ | |
| 2 | Ручка выбора режима доставки | DIRECT (ПРЯМОЙ СБРОС) |
| 3 | Выбор оружия | BOMBS (БОМБЫ) |
| 4 | AWRU | УСТАНОВИТЬ |
| a. Регуляторы интервала | УСТАНОВИТЬ | |
| b. Ручка количества | УСТАНОВИТЬ | |
| 5 | Переключатель включения носа/хвоста | ПО ТРЕБОВАНИЮ |
| 6 | Кнопки выбора станции | ВЫБРАТЬ СТАНЦИИ |
| 7 | Главное включение вооружения (MASTER ARM) | ARM (ВКЛ) |
| 8 | Кнопка "Бомба" | НАЖАТЬ |
Сброс бомб - Dive Toss и Dive Laydown
| Шаг | Система | Действие |
|---|---|---|
| 1 | Режим прицела | A/G (Воздух-земля) |
| 2 | Ручка выбора режима доставки | DT/DL |
| 3 | Переключатели режима HSI | NAV COMP |
| 4 | (WSO) Режим радара | AIR-GRD |
| 5 | (WSO) Дальность радара | 5 или 10 морских миль |
| 6 | (WSO) Питание радара | OPR |
| 7 | (WSO) Переключатель стабилизации антенны | NOR |
| 8 | (WSO) (ТОЛЬКО DT) Коэффициент сопротивления WRCS | УСТАНОВИТЬ |
| 9 | (WSO) (ТОЛЬКО DL) Дальность сброса WRCS | УСТАНОВИТЬ |
| 10 | (WSO) (ПРИ НЕОБХОДИМОСТИ) Упреждение сброса WRCS | УСТАНОВИТЬ |
| 11 | Ручка выбора оружия | BOMBS (БОМБЫ) |
| 12 | AWRU | УСТАНОВИТЬ |
| a. Регуляторы интервала | УСТАНОВИТЬ | |
| b. Ручка количества | УСТАНОВИТЬ | |
| 13 | Переключатель включения носа/хвоста | ПО ТРЕБОВАНИЮ |
| 14 | Кнопки выбора станции | ВЫБРАТЬ СТАНЦИИ |
| 15 | Главный переключатель включения вооружения (MASTER ARM SWITCH) | ARM (ВКЛ) |
Пикирование на цель (ТОЛЬКО DT)
| Шаг | Система | Действие |
|---|---|---|
| 1 | (WSO) Усиление приёмника | MIN (МИНИМУМ) |
| 2 | (WSO) ЗАХВАТИТЬ ЦЕЛЬ (СООБЩИТЬ) | |
| 3 | Кнопка "Бомба" (НАЖАТЬ И УДЕРЖИВАТЬ) | ПОСЛЕ СБРОСА БОМБЫ |
| 4 | Кнопка "Бомба" (ОТПУСТИТЬ) |
Сброс бомб - Laydown (Сброс с выравниванием)
| Шаг | Система | Действие |
|---|---|---|
| 1 | Режим прицела | A/G (Воздух-земля) |
| 2 | Ручка выбора режима доставки | LAYDOWN (L) (СБРОС С ВЫРАВНИВАНИЕМ) |
| 3 | Ручка снижения сетки | УСТАНОВИТЬ (ПРИ НЕОБХОДИМОСТИ) |
| 4 | Переключатели режима HSI | NAV COMP |
| 5 | (WSO) Дальность до цели WRCS | УСТАНОВИТЬ |
| a. Установить расстояние IP <-> TGT | ||
| 6 | (WSO) Дальность сброса WRCS | УСТАНОВИТЬ |
| 7 | (WSO) Упреждение сброса WRCS | УСТАНОВИТЬ (ПРИ НЕОБХОДИМОСТИ) |
| 8 | Ручка выбора оружия | BOMBS (БОМБЫ) |
| 9 | AWRU | УСТАНОВИТЬ |
| a. Регуляторы интервала | УСТАНОВИТЬ | |
| b. Ручка количества | УСТАНОВИТЬ | |
| 10 | Переключатель включения носа/хвоста | УСТАНОВИТЬ |
| 11 | Кнопки выбора станции | ВЫБРАТЬ СТАНЦИИ |
| 12 | Главный переключатель включения вооружения (MASTER ARM SWITCH) | ARM (ВКЛ) |
| 13 | Кнопка сброса бомбы | НАЖАТЬ И УДЕРЖИВАТЬ |
| ПОСЛЕ СБРОСА БОМБЫ | ||
| 14 | Кнопка сброса бомбы | ОТПУСТИТЬ |
Сброс бомб - Loft (Лофтирование)
| Шаг | Система | Действие |
|---|---|---|
| 1 | (WSO) Переключатель ACTIVATE | NORMAL (НОРМАЛЬНО) |
| 2 | (WSO) Ручка LOW ANGLE | УСТАНОВИТЬ |
| 3 | (WSO) Таймер PULLUP | УСТАНОВИТЬ |
| 4 | (WSO) Таймер RELEASE | УСТАНОВИТЬ НОЛЬ |
| 5 | Ручка выбора режима доставки | LOFT |
| 6 | Ручка выбора оружия | BOMBS (БОМБЫ) |
| 7 | AWRU | УСТАНОВИТЬ |
| a. Регуляторы интервала | УСТАНОВИТЬ | |
| b. Ручка количества | УСТАНОВИТЬ | |
| 8 | Переключатель включения носа/хвоста | ПО ТРЕБОВАНИЮ |
| 9 | Кнопки выбора станции | ВЫБРАТЬ СТАНЦИИ |
| 10 | Главный переключатель включения вооружения (MASTER ARM SWITCH) | ARM (ВКЛ) |
Над IP
| Шаг | Система | Действие |
|---|---|---|
| 1 | Кнопка "Бомба" | НАЖАТЬ И УДЕРЖИВАТЬ |
| 2 | В ТОЧКЕ НАБОРА ВЫСОТЫ | НАЧАТЬ НАБОР ВЫСОТЫ |
| ПОСЛЕ СБРОСА БОМБЫ | ||
| 3 | Кнопка "Бомба" | ОТПУСТИТЬ |
Сброс бомб - LABS, TGT FIND и OFFSET
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка режима прицела | A/G (Воздух-земля) |
| 2 | Ручка режима доставки | OFFSET BOMB или TGT FIND |
| 3 | (WSO) Переключатель поиска цели | HOLD (УДЕРЖАНИЕ) |
| 4 | Ручка режима навигации | NAV COMP |
| 5 | Переключатели режима HSI | NAV COMP |
| 6 | (WSO) Ручка режима INS | NAV |
| 7 | (WSO) Переключатель выбора режима навигации | NAV COMP |
| 8 | (WSO) Счётчики ввода WRCS | УСТАНОВИТЬ |
| a. Расстояние до цели N/S - шаг 100 футов | ||
| b. Расстояние до цели E/W - шаг 100 футов | ||
| c. Высота IP над уровнем моря - шаг 100 футов | ||
| d. Дальность сброса - шаг 10 футов или 100 футов (OFFSET BOMB) | ||
| e. Дальность сброса - дальность набора высоты LABS, шаг 10 футов или 100 футов | ||
| f. Упреждение сброса - миллисекунды (OFFSET BOMB при необходимости) | ||
| 9 | Ручка выбора оружия | BOMBS (БОМБЫ) (OFFSET BOMB) |
| 10 | AWRU | УСТАНОВИТЬ |
| a. Регуляторы интервала - УСТАНОВИТЬ | ||
| b. Ручка количества - УСТАНОВИТЬ | ||
| 11 | Переключатель включения носа/хвоста | ON (ВКЛ) (при необходимости) |
| 12 | Выбор станции | ЗАГРУЖЕННАЯ(ЫЕ) СТАНЦИЯ(И) |
| 13 | Главный переключатель включения вооружения (MASTER ARM SWITCH) | ARM (ВКЛ) |
| 14 | (WSO) Двойные таймеры | УСТАНОВИТЬ |
| a. Таймер набора высоты - T1 | ||
| b. Таймер сброса - T2 | ||
| 15 | (WSO) Гироскоп сброса | УСТАНОВИТЬ |
| a. Малый угол (LOFT) - ГРАДУСЫ |
Перед бомбометанием
| Шаг | Система | Действие |
|---|---|---|
| 1 | (WSO) Питание радара | OPR |
| 2 | (WSO) Режим радара | MAP PPI |
| 3 | (WSO) Переключатель стабилизации антенны | NOR |
| 4 | (WSO) Яркость курсора | НАСТРОИТЬ |
| 5 | (WSO) Угол места антенны | НАСТРОИТЬ |
| 6 | (WSO) Переключатель сканирования | WIDE (ШИРОКИЙ) |
| 7 | (WSO) Дальность радара | AI 10 или AI 25 |
Бомбометание - смещённая радиолокационная IP
| Шаг | Система | Действие |
|---|---|---|
| 1 | (WSO) Управление Along Track | Разместите курсор дальности над RIP |
| 2 | (WSO) Управление Cross Track | Разместите курсор смещения над RIP |
| 3 | (WSO) Кнопка Freeze | НАЖАТЬ |
| 4 | (WSO) Кнопка Target Insert | НАЖАТЬ |
| Приборы управления отображают команды наведения, когда кнопка Target Insert нажата, а пересечение курсоров будет позиционироваться над местоположением цели и отслеживать цель. Если цель находится на экране, установите высоту цели на счётчике ALT RANGE и подправьте курсоры над целью. | ||
| 5 | Кнопка сброса бомбы | НАЖАТЬ и УДЕРЖИВАТЬ (OFFSET BOMB) |
| a. При сбросе бомбы индикатор набора высоты - ON (ВКЛ) | ||
| b. Когда станция пуста, индикатор ARM станции - OFF (ВЫКЛ) | ||
| Когда самолёт находится на курсе к цели и на заранее запланированной высоте и воздушной скорости сброса, нажмите и удерживайте кнопку сброса бомбы до тех пор, пока бомба не будет сброшена, о чём свидетельствует включение индикатора набора высоты. |
Бомбометание - пролёт над визуальной IP
| Шаг | Система | Действие |
|---|---|---|
| 1 | (WSO) При пролёте над IP, кнопки Freeze и Target Insert | НАЖАТЬ |
| 2 | Кнопка сброса бомбы | НАЖАТЬ и УДЕРЖИВАТЬ (OFFSET BOMB) |
| a. При сбросе бомбы индикатор набора высоты - ON (ВКЛ) | ||
| b. Когда станция пуста, индикатор ARM станции - OFF (ВЫКЛ) | ||
| Когда самолёт находится на курсе к цели и на заранее запланированной высоте и истинной воздушной скорости, нажмите и удерживайте кнопку сброса бомбы до тех пор, пока не произойдёт сброс бомбы, о чём свидетельствует включение индикатора набора высоты. |
Бомбометание LABS/TGT Find
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка режима доставки (LABS) | Бомбометание LABS/TGT Find ПО ТРЕБОВАНИЮ Выберите запланированный режим доставки. ПРИМЕЧАНИЕ: При включённом переключателе поиска цели HOLD ручку выбора режима доставки можно установить в любой режим LABS без потери функции WRCS. |
| 2 | (WSO) Органы управления Along Track и Cross Track | Бомбометание LABS/TGT Find ПО ТРЕБОВАНИЮ (визуальная или радиолокационная IP) |
| 3 | (WSO) Кнопка Freeze | Бомбометание LABS/TGT Find НАЖАТЬ |
| 4 | (WSO) Кнопка Target Insert | Бомбометание LABS/TGT Find НАЖАТЬ |
| 5 | (WSO) После ввода цели, переключатель Activate | Бомбометание LABS/TGT Find ON (ВКЛ) Выберите положение ON только после того, как приборы управления перейдут на цель. |
| 6 | При предупреждающем тоне (начало T1) | Бомбометание LABS/TGT Find НАЧАТЬ НАБОР ВЫСОТЫ |
| 7 | Кнопка "Бомба" | Бомбометание LABS/TGT Find НАЖАТЬ и УДЕРЖИВАТЬ |
Ракеты
Запуск ракет
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка выбора режима доставки | DIRECT |
| 2 | Ручка выбора режима прицела | A/G (Воздух-земля) |
| 3 | Ручка снижения сетки | УСТАНОВИТЬ |
| 4 | Ручка выбора оружия | RKTS & DISP |
| 5 | AWRU QTY | ОДИНОЧНЫЙ ИЛИ ЗАЛП |
| 6 | Кнопки выбора станции | ВЫБРАТЬ СТАНЦИИ |
| 7 | Главное включение вооружения (MASTER ARM) | ARM (ВКЛ) |
| 8 | Кнопка "Бомба" | НАЖАТЬ |
Операции KY-28
Перед запуском
| Шаг | Система | Действие |
|---|---|---|
| 1 | Питание KY-28 | OFF и переключатель режима установлен в P |
| 2 | Установка кода | Убедитесь, что правильный код установлен персоналом, квалифицированным в работе с оборудованием защиты речи. В DCS и в сочетании с SRS (Simple Radio) это делается через меню связи с наземным экипажем в меню связи DCS. |
| 3 | Радиостанция UHF | ON |
| 4 | Переключатель режима | P |
| 5 | Ручка питания | ON |
| 6 | Наземный тест | Если требуется наземный тест оборудования, установите двустороннюю радиосвязь в открытом тексте на радиостанции с открытым голосом с подходящей удалённой станцией и запросите проверку оборудования. (В DCS нужен другой игрок) |
| 7 | Переключатель режима | C |
| 8 | Проверка сигнализации | KY-28 выполнит автоматическую проверку сигнализации, когда переключатель режима установлен в положение C, а ручка питания - в положение On. Проверка будет продолжаться около 2 секунд после подачи питания. В это время в гарнитуре слышен постоянный, непрерывный тон 1200 Гц. После успешного завершения проверки тон 1200 Гц прерывается с частотой 2,3 Гц. |
| 9 | Сброс прерывистого тона | Кратковременно установите кнопку микрофона в положение UHF, чтобы сбросить прерывистый тон. Когда кнопка микрофона отпущена, KY-28 возвращается в режим ожидания и готов к передаче или приёму. Если блок не проходит проверку сигнализации, постоянный тон 1200 Гц продолжается, и дальнейшая работа в режиме шифрования блокируется. |
| 10 | Отказ проверки сигнализации | Примечание: Если KY-28 не проходит проверку сигнализации, ручку питания необходимо установить в положение OFF, а переключатель режима - в положение P (открытый текст), чтобы включить обычную связь UHF. |
| 11 | Передача зашифрованных сообщений | Чтобы передать зашифрованные сообщения, установите кнопку микрофона в положение UHF и дождитесь, пока не раздастся кратковременный тон, прежде чем вводить голос. При установке ручки питания в положение ON кратковременный тон задерживается на 0,5 секунды после нажатия кнопки микрофона. В это время выполняется проверка шифрования, и синхронизирующая преамбула передаётся на принимающие станции. Если проверка шифрования не пройдена, в гарнитуре раздаётся тон 1200 Гц, прерывающийся с частотой 2,3 Гц, и передача в режиме шифрования невозможна. Если проверка шифрования пройдена, в гарнитуре раздаётся кратковременный тон. |
| 12 | Радиосвязь в режиме шифрования | После того, как раздастся кратковременный тон, установите двустороннюю радиосвязь в режиме шифрования с взаимодействующей станцией и проверьте разборчивость и силу сигнала и/или передайте своё сообщение. При отпускании кнопки микрофона KY-28 вернётся в режим ожидания. Одновременная передача двумя или более станциями на одной частоте невозможна и может привести к искажению сообщений или потере синхронизации. |
| 13 | Возобновление нормальной связи | Возобновите нормальную связь без шифрования в любое время, снова установив переключатель режима в положение P (открытый текст). |
| 14 | Проверка в полёте | Примечание: Вышеуказанные процедуры можно использовать для выполнения проверки оборудования в полёте. |
После запуска
| Шаг | Система | Действие |
|---|---|---|
| 1 | Работа оборудования | Оборудование защиты речи должно работать в соответствии с инструктажем. |
| 2 | Предупреждение: | Если ZEROIZE нажата во время полёта, зашифрованная связь невозможна. Код можно сбросить (или изменить) только через меню связи с наземным экипажем после посадки. |
После посадки
| Шаг | Система | Действие |
|---|---|---|
| 1 | Обнулить, как указано в инструктаже. | |
| 2 | Выключить питание | OFF |
Операции Pave Spike
Включение
| Шаг | Действие | Кнопка |
|---|---|---|
| 1 | Убедитесь, что питание самолёта включено (основная шина переменного тока и основная шина постоянного тока) | |
| 2 | Убедитесь, что соответствующие автоматические выключатели не вытащены | Панель автоматических выключателей № 4, левая стенка WSO |
| 3 | Кнопка POWER ON (WSO, набор органов управления целеуказателем) | Нажмите и убедитесь, что индикатор горит |
| 4 | BIT 1 | Убедитесь, что индикатор MALF не горит |
| 5 | Переключатель выбора видео | ASQ-153 (WSO, главная панель) |
| 6 | Режим DSCG | TV (пилот или WSO) |
| 7 | Выпустить | Нажмите кнопку STOW, подождите 5 секунд и убедитесь, что индикатор погас |
| 8 | Убедитесь, что DSCG включён и отображает видеосигнал с камеры контейнера |
Процедуры встроенного тестирования (BIT)
Эта глава содержит все процедуры встроенного тестирования (BIT) для системы радара, включая BIT "воздух-земля" и BIT "воздух-воздух", самого экрана DSCG, прицельного контейнера Pave Spike, системы TACAN и системы VOR/ILS.
BIT радара "воздух-воздух"
BIT 0 Калибровка точки прицеливания и скорости сближения
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка питания радара | STBY |
| 2 | Ручка режима DSCG | RDR BIT |
| a. Тестовая сетка | Выровнена ± 1/16 дюйма | |
| 3 | Ручка тестирования | DOT BAL и УДЕРЖИВАТЬ |
| a. Точка прицеливания | Отцентрирована | |
| b. Скорость сближения | ±20 узлов | |
| 4 | Ручка питания радара | TEST |
| 5 | Ручка тестирования | DOT BAL и УДЕРЖИВАТЬ |
| a. Точка прицеливания | В зоне калибровки | |
| b. Скорость сближения | 900 ± 50 узлов | |
| 6 | Отрегулируйте линию горизонта | Нулевой тангаж |
| 7 | Ручка дальности радара | AI 10 |
| 8 | Ручка режима DSCG | DSCG TEST |
| a. Дисплей поиска | Восемь оттенков серого | |
| b. Отрегулируйте BRT | Оптимально | |
| c. Отрегулируйте CONTR | Оптимально | |
| 9 | Ручка режима DSCG | RDR BIT |
| 10 | Ручка дальности радара | AI 25 |
| 11 | Установите строб EL | 30° вниз |
| (Предотвращает удар антенны радара об упоры) | ||
| 12 | Переключатель Stab | OUT |
| a. Линия горизонта | Удалена | |
| 13 | Переключатель Stab | NOR |
| 14 | Ручка питания радара | STBY |
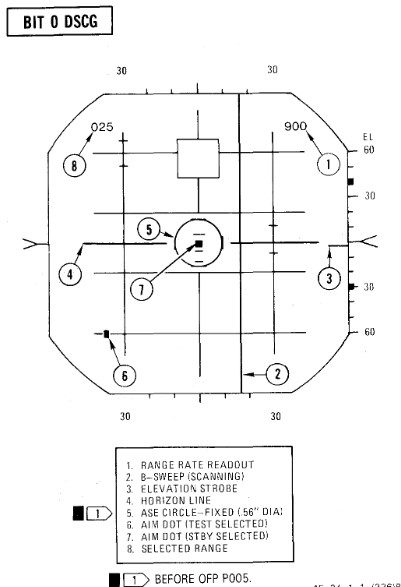
BIT 1 Минимальный различимый сигнал, чувствительность захвата, память отслеживания дальности
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка тестирования | Установить 1 |
| 2 | Ручка питания радара | TEST |
| a. Контрольный измеритель (RDR MAG) | Показывает 1,4 - 1,8. | |
| b. Линия горизонта | В пределах ограничительных меток, как показано. | |
| 3 | Отрегулируйте индикаторы | Для оптимального контраста (CONTR) и яркости (BRT). |
| a. Минимальные цели | 11 целей видны при поиске. | |
| b. Установите ручку дальности | На 5, 10, 50, 100, 200 и 25, проверяя видео. | |
| 4 | Разместите символ захвата за последней целью. | |
| 5 | Перемещайте строб дальности вниз, удерживая полное нажатие. | |
| a. Строб дальности захватывается до прохождения семи целей. | ||
| b. Поддерживайте захват в течение 5 секунд. | ||
| 6 | Ручка тестирования | Установить 0 |
| a. Система разблокируется через 4-6 секунд. | ||
| 7 | Ручка тестирования | Установить 1 |
| 8 | Переключатель импульсов | SHORT (КОРОТКИЙ) |
| a. Контрольный измеритель (RDR MAG) | Показывает 0,9 - 1,15. | |
| b. Минимальные цели | Восемь целей видны при поиске. | |
| 9 | Разместите символ захвата за последней целью. | |
| 10 | Перемещайте строб дальности вниз, удерживая полное нажатие. | |
| a. Строб дальности захватывается до прохождения восьми целей. | ||
| b. Поддерживайте захват в течение 5 секунд. | ||
| 11 | Ручка тестирования | 0 на 3 секунды, затем выберите TEST 1 |
| a. Система переходит в режим памяти на 3 секунды, затем снова захватывает цель. | ||
| b. Индикатор скорости сближения мигает с частотой 4 Гц в течение 3 секунд. | ||
| 12 | (P) Питание радиолокационной ракеты | STBY (ОЖИДАНИЕ) НА 1 МИНУТУ |
| 13 | (P) Питание радиолокационной ракеты | CW ON |
| a. Индикатор RDR | Горит постоянно 1 МИНУТУ | |
| 14 | Селектор измерителя | KLY |
| a. Измеритель показывает | 0,25 - 1,25 | |
| 15 | Захват третьей цели | |
| a. Точка прицеливания в рамке | ||
| b. Скорость сближения 900 ± 200 узлов | ||
| c. Сбросить захват |
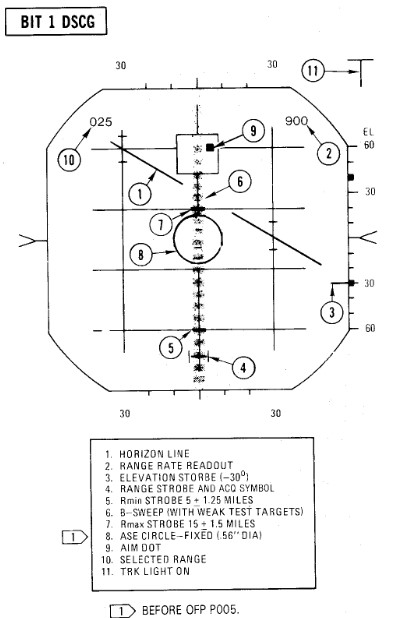
BIT 2 Ускорение отслеживания дальности, положение антенны
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка тестирования | Установить 2 |
| 2 | Захват 10-й цели | |
| a. Система срывает захват менее чем за 30 секунд. | ||
| 3 | Захват второй цели | |
| a. Система поддерживает захват не менее 30 секунд. | ||
| b. Индикатор скорости сближения 900 ± 200 узлов | ||
| 4 | Сбросить захват | |
| 5 | Переключатель импульсов | AUTO |
| ПРОВЕРКА МАЯКА | ||
| 6 | Ручка режима радара | BEACON |
| a. Цели BIT исчезают, и появляется как минимум одна цель маяка. | ||
| 7 | Ручка режима радара | MAP |
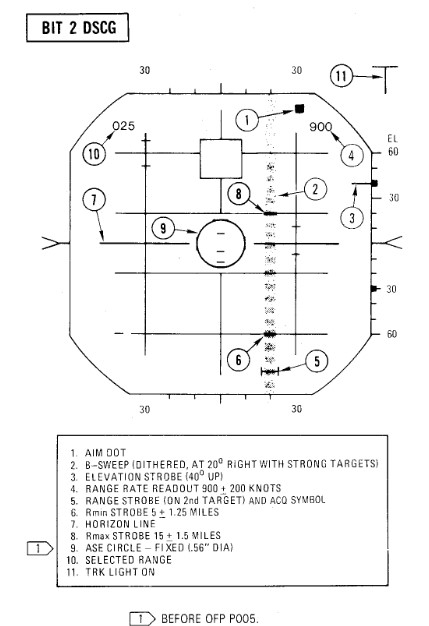
BIT 3 Отслеживание угла
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка тестирования | Установить 3 |
| a. B-развёртка и строб EL на 0 ± 0,2° (до захвата). | ||
| 2 | Захват четвёртой цели | |
| a. Точка прицеливания вращается между кругом ASE и сегментированным кругом (не выходя за пределы ни одного из них более чем на 1/4 дюйма). | ||
| b. Rmax и Rmin на 15 и 5 милях. | ||
| c. Круг ASE, как показано. | ||
| d. Строб EL опускается на 30° (после захвата). | ||
| 3 | Сбросить захват и захватить 10-ю цель | |
| a. Точка прицеливания вращается внутри круга ASE. | ||
| 4 | Поддерживайте захват для BIT 4. |
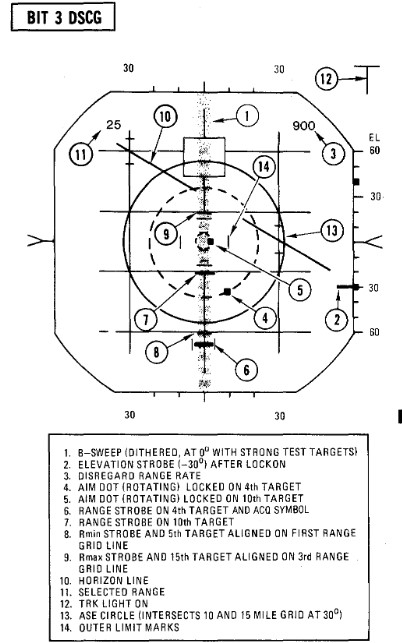
BIT 4 HOJ, память отслеживания угла, AOJ, псевдо- и имитированный доплеровский сдвиг, сканирование коридора
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка тестирования | Установить 4 (рисунок a). |
| a. Все цели BIT исчезают, но отображение захвата остаётся. | ||
| b. Индикатор H ON (ВКЛ) | ||
| c. Индикатор скорости сближения мигает, показывает 900 ± 200 узлов, а последняя цифра заменена буквой H. | ||
| 2 | (P) Переключатель питания радиолокационной ракеты | OFF (ВЫКЛ) (или когда ракеты AIM-7 выключены). |
| 3 | Установите B-развёртку и строб EL | На 0° для справки. |
| 4 | Ручка питания радара | STBY (ОЖИДАНИЕ). |
| a. B-развёртка и строб EL смещаются менее чем на +5° до разблокировки. | ||
| 5 | Ручка питания радара | TEST. |
| 6 | Переключатель Action | FA (полное нажатие) (рисунок b). |
| a. Появляется дисплей AOJ. | ||
| b. Индикатор скорости сближения исчезает, и индикатор H OFF (ВЫКЛ). | ||
| 7 | Переключатель отслеживания | AOJ OUT. |
| a. Система возвращается к поиску. | ||
| 8 | Переключатель отслеживания | AUTO. |
| 9 | Дисплей | VI. |
| a. B-развёртка охватывает 3 полосы в выбранном коридоре CAA. | ||
| b. Строб EL сканирует от -21° до +57°. | ||
| 10 | Дисплей | B-wide. |
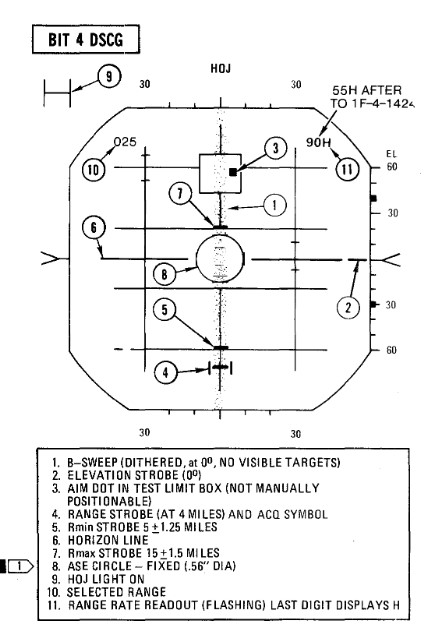 Figure a
Figure a
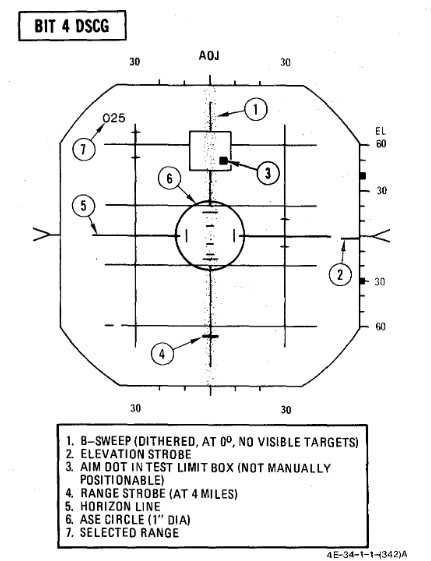 Figure b
Figure b
BIT 5 Шум скорости сближения, PLMS, CAA
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка тестирования | Установить 5 |
| 2 | Захват третьей цели | |
| a. Индикатор скорости сближения 0 ± 300 узлов. | ||
| b. Точка прицеливания внутри круга ASE. | ||
| c. Круг ASE диаметром 0,56 дюйма. | ||
| 3 | Сбросить захват | |
| 4 | Переключатель импульсов | SHORT (КОРОТКИЙ) |
| 5 | (P) Ручка режима прицела | A/A (Воздух-воздух) |
| 6 | Ручка режима радара | BST (Визирование) |
| 7 | Ручка дальности | AI 5 |
| 8 | (P) Кнопка автоматического захвата | НАЖАТЬ и ОТПУСТИТЬ |
| a. Радар захватывает первую цель | ||
| 9 | (P) Кнопка автоматического захвата | НАЖАТЬ и ОТПУСТИТЬ |
| a. Радар срывает захват, строб дальности переходит к следующей цели и захватывает её. | ||
| b. Повторяйте этот шаг для всех целей. | ||
| 10 | Кнопка "Воздух-воздух" | НАЖАТЬ |
| a. Индикатор "Воздух-воздух" | OFF (ВЫКЛ) | |
| b. Управление радаром передаётся на RCP. | ||
| 11 | Сбросить захват | |
| 12 | Ручка режима радара | MAP |
| 13 | Ручка дальности | AI 25 |
| 14 | Переключатель импульсов | LONG (ДЛИННЫЙ) |
| 15 | Захват пятой цели | |
| a. RDR MAG показывает 1,4 - 1,8. | ||
| 16 | Переключатель импульсов | AUTO |
| a. RDR MAG показывает 0,9 - 1,15 (PLMS). | ||
| 17 | Ручка Aspect | TAIL |
| a. Индикатор скорости сближения отображает курс истребителя (0°-360°) | ||
| 18 | Ручка Display | VI |
| a. Обновляет отображение курса истребителя. | ||
| 19 | Ручка Display | B-WIDE |
| a. Прекращает обновление курса истребителя. |
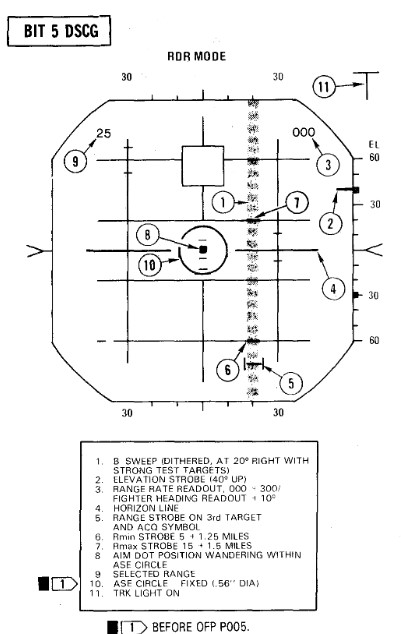
BIT 6 Дисплей атаки AIM-7 и блокировки
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка тестирования | Установить 6 |
| Индикатор T (отслеживание) загорается, но индикатор SKIN TRK остаётся выключенным во время этого теста. Это нормальная индикация с DSCG. | ||
| 2 | Ручка питания радара | TEST |
| 3 | Переключатель питания ракет | STBY (ОЖИДАНИЕ) |
| 4 | Установите строб дальности | За пределы 15 миль. |
| a. Rmax на 15 ± 1,5 миль, Rmin на 5 ± 1,25 миль. | ||
| Скорость сближения 000 узлов указывает на установленные ракеты/заглушки AIM-7E или пустые станции. 900 узлов указывает на установленные ракеты/заглушки AIM-7F. После OFP P005 номер версии OFP будет отображаться в течение первых 10 секунд вместо показаний скорости сближения; например, версия OFP P005 будет составлять примерно 500 узлов. | ||
| 5 | Переместите строб дальности вниз | (с полунажатием или полным нажатием) |
| a. Точка прицеливания неподвижна внутри рамки. | ||
| b. Индикатор HOLD ALT ON (ВКЛ) за пределами 15 миль, OFF (ВЫКЛ) на 15 милях. | ||
| c. Индикаторы IN RANGE и SHOOT ON (ВКЛ), когда строб дальности находится между Rmax и Rmin. | ||
| d. Круг ASE остаётся неизменного размера. | ||
| e. Break X возникает, круг ASE и показания скорости сближения исчезают, индикаторы IN RANGE/SHOOT OFF (ВЫКЛ) на 5 милях или менее. | ||
| 6 | Ручка питания радара | STBY (ОЖИДАНИЕ) |
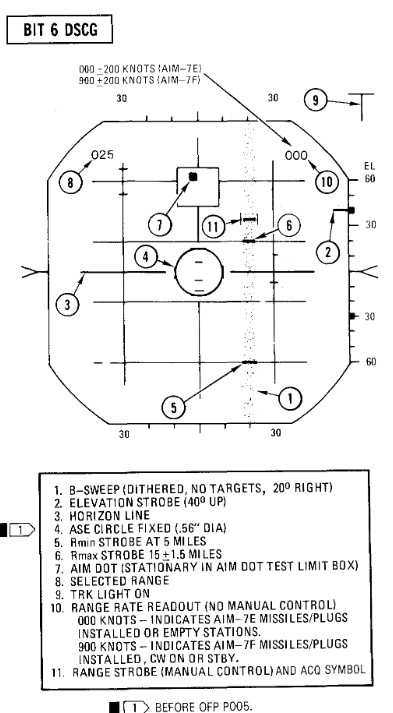
BIT радара "воздух-земля"
BIT 5
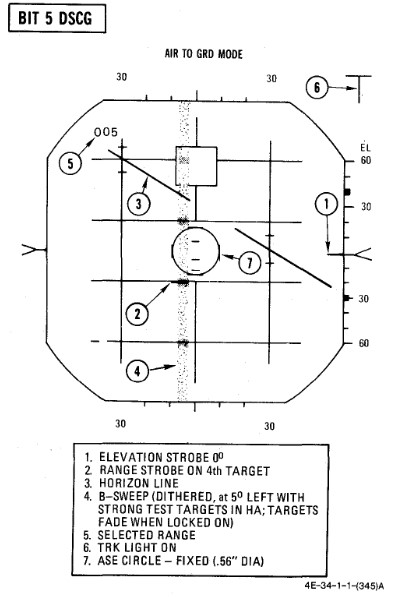
Наклон и ноль дальности
| Шаг | Система | Действие |
|---|---|---|
| 1 | (P) Ручка режима прицела | A/G (Воздух-земля) |
| 2 | Ручка питания радара | TEST |
| 3 | Ручка дальности радара | AI 5 |
| 4 | Ручка режима радара | A/G (Воздух-земля) |
| 5 | Ручка тестирования | 5 |
| a. Монитор (RDR MAG) 0,9-1,15 | ||
| b. B-развёртка 5° ± 3° слева от центра. | ||
| c. Символ захвата отцентрирован на B-развёртке (до захвата). | ||
| d. Линия горизонта указывает на крен 30° влево и пикирование 30°. | ||
| 6 | Захватите первую цель | |
| a. Появляется круг ASE, и B-развёртка исчезает (AGC). Действие AGC уменьшает интенсивность B-развёртки, и более слабые тестовые цели исчезают. Однако не является ненормальным, если более сильные тестовые цели видны на B-развёртке. | ||
| b. (P) Шкала дальности в положении 5:00 в пределах ± 0,5° (6000 футов). | ||
| 7 | Захватите вторую цель | |
| a. (P) Шкала дальности в положении 3:00 в пределах ± 0,5° (12 000 футов). | ||
| 8 | Захватите третью цель | |
| a. (P) Шкала дальности в положении 1:00 в пределах ± 0,5° (18 000 футов). |
Калибровка строба дальности бомбометания
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка тестирования | 1 |
| 2 | Ручка Display | PPI WIDE |
| 3 | Ручка режима радара | MAP |
| 4 | Ручка дальности радара | AI 10 |
| a. Развёртка PPI сканирует сектор 120°. | ||
| b. Снос развёртки PPI 5,6°. | ||
| c. Дальний край строба бомбометания касается соответствующей цели BIT. |
Code
BIT WRCS
BIT WRCS
| Шаг | Система | Действие |
|---|---|---|
| 1 | INS | ALIGN или NAV |
| 2 | Ручка высоты/дальности цели | 170 |
| 3 | Таймеры бомбометания ARBCS | УСТАНОВИТЬ |
| a. Набор высоты | 5.0 | |
| b. Сброс | 10.0 | |
| 4 | (P) Переключатель BRG/DIST | NAV COMP |
| 5 | (WSO) Переключатель режима навигации | NAV COMP |
Миссия Laydown
| Шаг | Система | Действие |
|---|---|---|
| 1 | Селектор BIT WRCS | LAYDOWN (СБРОС С ВЫРАВНИВАНИЕМ) |
| 2 | Кнопка BIT | НАЖАТЬ и УДЕРЖИВАТЬ |
| 3 | Через 5 секунд, кнопка FRZ | НАЖАТЬ |
| a. Индикатор дальности | ON (ВКЛ) | |
| b. Через 15 секунд | GO/NO GO |
Миссия Dive Laydown
| Шаг | Система | Действие |
|---|---|---|
| 1 | Селектор BIT WRCS | DIVE LAYDOWN (ПИКИРУЮЩИЙ СБРОС С ВЫРАВНИВАНИЕМ) |
| 2 | Кнопка BIT | НАЖАТЬ и УДЕРЖИВАТЬ |
| 3 | Через 5 секунд, кнопка FRZ | НАЖАТЬ |
| a. Индикатор высоты | ON (ВКЛ) | |
| b. Через 15 секунд | GO/NO GO |
Миссия Dive Toss
| Шаг | Система | Действие |
|---|---|---|
| 1 | Селектор BIT WRCS | DIVE TOSS (ПИКИРУЮЩИЙ СБРОС) |
| 2 | Кнопка BIT | НАЖАТЬ и УДЕРЖИВАТЬ |
| 3 | Через 5 секунд, кнопка FRZ | НАЖАТЬ |
| a. Индикатор высоты | ON (ВКЛ) | |
| b. Через 15 секунд | GO/NO GO |
Миссия AGM-45
| Шаг | Система | Действие |
|---|---|---|
| 1 | Селектор BIT WRCS | AGM-45 |
| 2 | Кнопка BIT | НАЖАТЬ и УДЕРЖИВАТЬ |
| a. BDHI и HSI мили 7,6 ± 1,0 NM | ||
| b. Индикатор высоты | ON (ВКЛ) | |
| 3 | Через 5 секунд, кнопка FRZ | НАЖАТЬ |
| a. BDHI и HSI мили УМЕНЬШАЮТСЯ | ||
| b. Нижний индикатор угла атаки | КОМАНДА НАБОР ВЫСОТЫ | |
| c. Через 10 секунд, центральный индикатор угла атаки | КОМАНДА ГОРИЗОНТАЛЬНЫЙ ПОЛЁТ | |
| d. Через 5 секунд | GO/NO GO | |
| e. Через 5 секунд, верхний индикатор угла атаки | КОМАНДА ПИКИРОВАНИЕ |
Миссия Target Find/Offset Bomb
| Шаг | Система | Действие |
|---|---|---|
| 1 | Селектор BIT WRCS | TGT FIND/OFFSET BOMB |
| 2 | Кнопка BIT | НАЖАТЬ и УДЕРЖИВАТЬ |
| a. Индикатор высоты | ON (ВКЛ) | |
| 3 | Через 5 секунд, управление курсором Along Track | ПЕРЕМЕСТИТЬ |
| 4 | Управление Cross Track | ПЕРЕМЕСТИТЬ |
| 5 | Яркость курсора | НАСТРОИТЬ |
| 6 | Кнопка сброса | НАЖАТЬ |
| a. Курсоры возвращаются в положение нулевой дальности и азимута. | ||
| 7 | Кнопка Target Insert | НАЖАТЬ |
| a. Курсор Along Track | 6,5 NM на линии сетки 00 (± 2000 футов) | |
| b. Курсор Cross Track | 30° +1,5° ВПРАВО | |
| c. (P) Указатель пеленга HSI | 23° ± 2,5° (справа от курсовой черты); индикатор TGT HSI - ON (ВКЛ) | |
| d. Индикатор TGT INS | ON (ВКЛ) | |
| e. Стрелка BDHI № 1 | 23° ± 0,5° (справа от верхнего индекса) | |
| f. (P-WSO) HSI и BDHI мили | 4,8 ± 1,0 NM | |
| g. (P) Метки крена прицела | ПОВЁРНУТЫ ПО ЧАСОВОЙ СТРЕЛКЕ | |
| h. (P) Вертикальный указатель ADI | ОТКЛОНЯЕТСЯ ПОЛНОСТЬЮ ВПРАВО | |
| 8 | Через 5 секунд, кнопка FRZ | НАЖАТЬ |
| a. (P-WSO) HSI и BDHI мили | УМЕНЬШАЮТСЯ ДО НУЛЯ, ЗАТЕМ УВЕЛИЧИВАЮТСЯ | |
| b. (P) Метки крена прицела | ВРАЩАЮТСЯ (когда мили проходят через ноль) | |
| c. Через 15 секунд | GO/NO GO |
Калибровка дальности бомбометания/проверка интеграции
| Шаг | Система | Действие |
|---|---|---|
| 1 | Режим INS | NAV |
| 2 | Панель управления WRCS | УСТАНОВИТЬ |
| a. Расстояние до цели N/S | N120 | |
| b. Расстояние до цели E/W | 000 | |
| c. Высота цели | УСТАНОВИТЬ ТЕКУЩУЮ ВЫСОТУ САМОЛЁТА НАД УРОВНЕМ МОРЯ (29,92) | |
| d. Упреждение сброса | 000 | |
| e. Дальность сброса | 000 | |
| 3 | Панель сброса оружия | УСТАНОВИТЬ |
| a. Переключатель Activate | NORM (НОРМАЛЬНО) | |
| b. Переключатель Target Find | HOLD (УДЕРЖАНИЕ) | |
| c. Переключатель дальности | X100 | |
| 4 | Переключатели передней кабины | УСТАНОВИТЬ |
| a. Режим доставки | T LAD | |
| b. Выбор оружия | BOMBS (БОМБЫ) | |
| c. Кнопки выбора станции | OFF | |
| d. Переопределение вооружения | НАЖАТЬ | |
| 5 | Таймеры | УСТАНОВИТЬ (значения для доставки) |
| a. Таймер набора высоты | ||
| b. Таймер сброса | ||
| 6 | Кнопка Target Insert | НАЖАТЬ |
| a. Курсор Along Track | Переходит на вторую цель BIT | |
| 7 | Счётчики расстояния WRCS N/S | Увеличивайте или уменьшайте, пока края курсора Along Track и вторая цель BIT не совпадут. |
| a. Обратите внимание на разницу между счётчиком и N120. | ||
| b. Для большего значения счётчика поправка положительная (+); для меньшего значения счётчика поправка отрицательная (-). | ||
| 8 | Расстояние до цели N/S | СБРОСИТЬ |
| a. Установите предполётную дальность сброса с учётом ошибки калибровки в шаге 7. | ||
| b. Переключатель дальности сброса | NORM или X100 (по требованию) | |
| c. Переключатель Activate | ON (ВКЛ) | |
| 9 | Счётчик дальности сброса | УВЕЛИЧИВАТЬ (медленно до тона 1/3 секунды) |
| a. Проверьте точность таймера. | ||
| b. (P) Проверьте показания LABS. | ||
| c. Обратите внимание на разницу между полученным показанием счётчика RR и предполётной дальностью сброса/активации и примените её в качестве поправки ко всем дальностям. | ||
| (1) Для большего значения счётчика поправка положительная (+); для меньшего значения счётчика поправка отрицательная (-). |
Выключение WRCS
| Шаг | Система | Действие |
|---|---|---|
| 1 | Селектор BIT WRCS | ОТПУСТИТЬ и OFF |
| 2 | Счётчик высоты/дальности цели | 000 |
| 3 | Панель сброса оружия | |
| a. Переключатель Activate | NORM (НОРМАЛЬНО) | |
| b. Переключатель Target Find | NORM (НОРМАЛЬНО) | |
| c. Переключатель дальности | NORM (НОРМАЛЬНО) | |
| 4 | Панель управления WRCS | RESET (СБРОС) |
Тесты навигации
Тест TACAN
| Шаг | Система | Действие |
|---|---|---|
| 1 | Ручка выбора функции | T/R |
| Подождите 90 секунд для прогрева | ||
| 2 | Курс | УСТАНОВИТЬ НА 180°. |
| 3 | Кнопка тестирования TACAN | НАЖАТЬ и ОТПУСТИТЬ |
| 4 | Обратите внимание на следующее: | |
| a. Индикатор тестирования | Кратковременно мигает. | |
| b. Флажки курса и дальности | В поле зрения. | |
| c. Указатель пеленга | Поворачивается на 270° примерно на 7 секунд. | |
| d. Флажки курса и дальности | Вне поля зрения. | |
| e. Расстояние | Показывает 0,0 + 0,5 мили (-0,5 мили отображается как 399,5 мили). | |
| f. Указатель пеленга | Поворачивается на 180° + 3°. | |
| g. Индикатор отклонения от курса | В пределах 1/2 точки от центра. | |
| h. Индикатор TO-FROM | Показывает TO. | |
| i. Примерно через 15 секунд флажки курса и дальности будут видны до завершения теста. |
Тест VOR/ILS
| Шаг | Система | Действие |
|---|---|---|
| 1 | Селектор частоты ILS | Выберите частоту на индикаторе. |
| 2 | Нажмите кнопку VOR/MKR Test | Индикаторы курсового радиомаяка загораются. |
| 3 | Выбрана частота VOR | Должна быть выбрана при наличии действительного сигнала VOR. |
| 4 | Выбран курс | 315° на селекторе курса HSI. |
| 5 | Режим HSI | VOR/ILS. |
| 6 | Нажмите кнопку тестирования | Запускает тест. |
| a. Индикатор отклонения от курса перемещается к центру (с максимально допустимой ошибкой ± 4°). | ||
| b. Индикатор "to-from" на HSI показывает TO. | ||
| c. Индикаторы курсового радиомаяка загораются. | ||
| d. Указатели пеленга на HSI и BDHI поворачиваются на 315°. |
Тест оптического прицела
| Шаг | Система | Действие |
|---|---|---|
| 1 | Мизинцевый переключатель | RADAR |
| 2 | Рычаг затвора прицела | OPEN (ОТКРЫТЬ) |
| 3 | Ручка режима прицела | CAGE |
| 4 | Ручка снижения сетки | 35 мил |
| 5 | Ручка интенсивности сетки | ПО ТРЕБОВАНИЮ |
| 6 | Переключатели вооружения | OFF/SAFE (ВЫКЛ/БЕЗОПАСНО) |
| a. Зелёные/жёлтые индикаторы станции | OFF (ВЫКЛ) | |
| 7 | Ручка режима доставки | DIRECT (ПРЯМОЙ СБРОС) |
| 8 | Кнопка переопределения безопасности вооружения | НАЖАТЬ |
| 9 | Ручка режима прицела | CAGE - A/G - A/A |
| a. Визирная марка (на RBL) перемещается не более чем на ± 2 мил. | ||
| 10 | Ручка снижения сетки | 10 мил |
| 11 | Ручка режима прицела | BIT 1 (рисунок 2-21) |
| a. Сетка перемещается на 25 ± 4 мил влево. | ||
| b. Метки крена поворачиваются на 90° по часовой стрелке. | ||
| c. Шкала дальности показывает 4000 футов (3 часа в пределах ± 15°). | ||
| 12 | Ручка режима прицела | BIT 2 (рисунок 2-21) |
| a. Сетка опускается на 25 ± 4 мил. | ||
| b. Метки крена указывают на горизонтальный полёт. | ||
| c. Шкала дальности показывает 6700 футов (12:30 в пределах ± 15°). | ||
| 13 | Ручка режима прицела | A/A (Воздух-воздух) |
| a. Визирная марка возвращается на RBL. | ||
| 14 | (WSO) Ручка питания радара | TEST |
| 15 | (WSO) Ручка тестирования | Установить 5 |
| 16 | (WSO) Ручка дальности | AI 5 |
| 17 | (WSO) Ручка режима радара | BST (Визирование) |
| 18 | (WSO) Захват первой цели BIT | |
| 19 | Мизинцевый переключатель | RADAR - HEAT |
| a. Визирная марка остаётся на RBL. | ||
| 20 | Мизинцевый переключатель | GUNS (ПУШКИ) |
| a. Индикатор GUN на ИЛС | ON (ВКЛ) | |
| b. Шкала дальности показывает 6000 футов (1 час в пределах ± 15°). | ||
| c. Сетка медленно опускается в соответствии с соответствующим углом атаки: | ||
| Единицы угла атаки | (мил) | |
| 0 | (36) | |
| 5 | (31) | |
| 10 | (27) | |
| 15 | (22) | |
| 20 | (17) | |
| 25 | (13) | |
| 30 | (8) | |
| 21 | Кнопка Cage | НАЖАТЬ И УДЕРЖИВАТЬ |
| a. Визирная марка перемещается на дальность фиксации 1000 футов (примерно 2 мил ниже RBL). | ||
| b. Шкала дальности остаётся на 6000 футов (1 час в пределах ± 15°). | ||
| 22 | (WSO) Сбросить захват радара | |
| a. Шкала дальности | OFF (ВЫКЛ) | |
| b. Визирная марка перемещается на | RBL. | |
| 23 | Кнопка Cage | ОТПУСТИТЬ |
| a. Визирная марка перемещается на дальность фиксации 1000 футов (примерно 2 мил ниже RBL). | ||
| 24 | Ручка режима прицела | STBY или CAGE |
| 25 | Ручка режима доставки | OFF |
| 26 | Кнопка переопределения безопасности вооружения | RESET (СБРОС) |
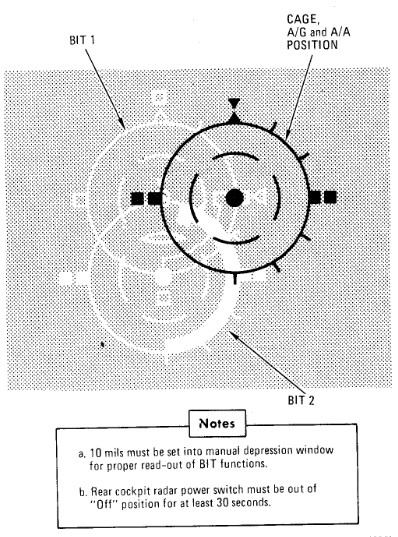
Планирование миссии
 Капитан Джо Фэган (слева) и первый лейтенант Рэнди Чоу готовят планы полётов перед «миссией» на своём симуляторе самолёта F-4G Phantom II Advanced Wild Weasel. ФОТО из журнала AIRMAN за ноябрь 1984 года
Капитан Джо Фэган (слева) и первый лейтенант Рэнди Чоу готовят планы полётов перед «миссией» на своём симуляторе самолёта F-4G Phantom II Advanced Wild Weasel. ФОТО из журнала AIRMAN за ноябрь 1984 года
🚧 Этот раздел находится в разработке.
Оптимальное использование самолёта для получения максимальных характеристик при минимальном расходе топлива требует тщательного предполетного планирования миссии. Планирование миссии включает в себя множество вещей, которые выходят за рамки этой публикации. В данном случае планирование миссии будет охватывать определённые ключевые фазы миссии и объяснять использование таблиц характеристик.
Следующий пример миссии противовоздушной обороны демонстрирует особенности лётных данных. Хотя пример задачи не охватывает многие возможности самолёта, он знакомит экипаж с использованием лётных данных, чтобы любую миссию можно было спланировать перед полётом за короткое время.
Пример задачи иллюстрирует с помощью графического решения, как таблицы характеристик можно интегрировать для формирования полного плана полёта миссии. Шаги, используемые для разработки такого графика, показаны в задаче.
Профиль миссии противовоздушной обороны
Выполните взлёт и набор высоты на максимальной тяге на тяге Mil. Выполните крейсерский полёт на оптимальной высоте и скорости максимальной дальности до зоны боевых действий, расположенной в 500 милях от авиабазы. Сбросьте внешние баки, когда они опустеют. Выполните боевое маневрирование на максимальной тяге в течение всего времени, допустимого требованиями к топливу для возвращения и посадки. Предполагается, что ракеты и патроны пушки израсходованы в конце боевого периода. Вернитесь на аэродром на оптимальной высоте и воздушной скорости. Выполните снижение на скорости максимальной дальности, прибыв в пункт назначения с резервом топлива 2000 фунтов для посадки. Обзор миссии противовоздушной обороны и пример плана миссии изображают общий план миссии.
Данные миссии
Конфигурация
- (4) ракеты AIM-9, пилоны и пусковые установки
- (4) ракеты AIM-7D
- (1) носовая пушка (639 патронов боеприпасов)
- (2) внешние баки крыла объёмом 370 галлонов
- (1) центральный бак объёмом 600 галлонов
- Используемое топливо (включая внешние баки) 20 768 фунтов
Факторы миссии
Взлёт:
| Параметр | Значение |
|---|---|
| Ветер | Штиль |
| Барометрическая высота | 2000 футов |
| Температура | +38.5°C |
| Взлётно-посадочная полоса | 020° |
| Длина взлётно-посадочной полосы | 9000 футов |
| Ветер набора высоты | (встречный) 20 узлов |
| Ветер крейсерского полёта туда | (встречный) 50 узлов |
| Ветер крейсерского полёта обратно | (попутный) 50 узлов |
| Ветер снижения | (попутный) 20 узлов |
Посадка:
| Параметр | Значение |
|---|---|
| Ветер | 020°/10 |
| Барометрическая высота | 2000 футов |
| Температура | +20°C |
| Взлётно-посадочная полоса | 020° |
| Длина взлётно-посадочной полосы | 9000 футов |
Рисунки
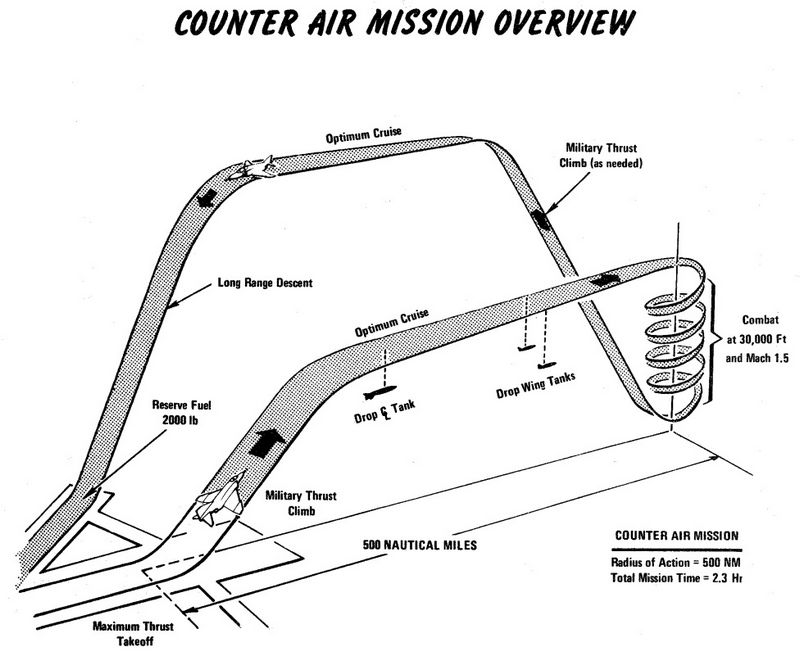
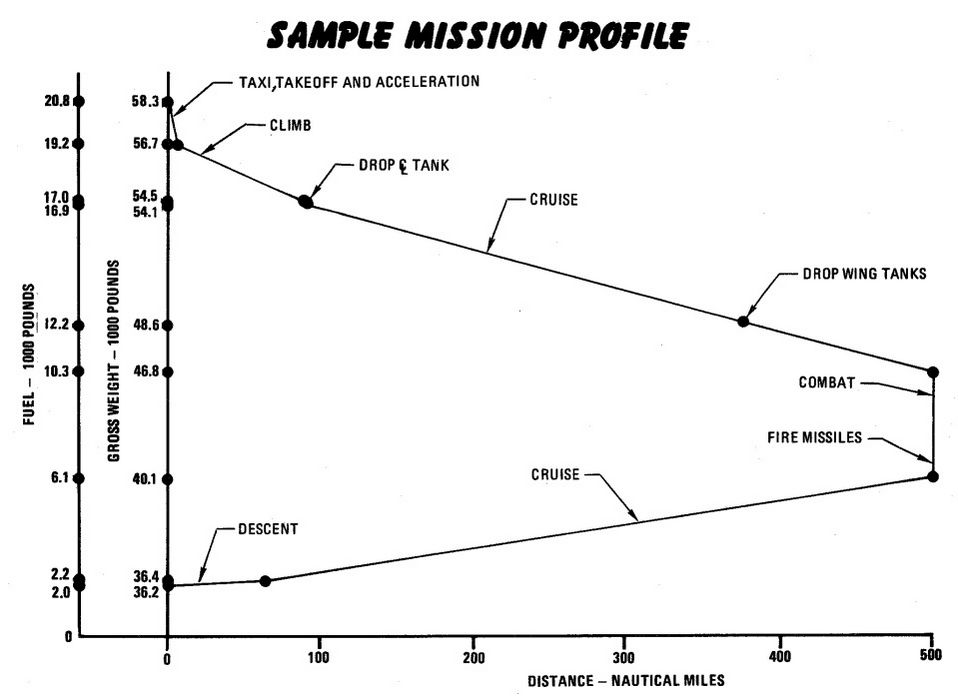
Аварийные процедуры
В этом разделе содержатся процедуры, которым необходимо следовать для устранения аварийной ситуации. Эти процедуры обеспечат максимальную безопасность экипажа и/или самолёта до тех пор, пока не будет выполнена безопасная посадка или другое соответствующее действие. Процедуры расположены в наиболее желательной последовательности для большинства случаев; поэтому шаги следует выполнять в указанной последовательности, если только пилот не может определить вескую причину для отклонения. Множественные аварийные ситуации, неблагоприятные погодные условия и другие особые условия могут потребовать изменения этих процедур. Критические элементы (ВЫДЕЛЕНЫ ЖИРНЫМ ШРИФТОМ), содержащиеся в различных аварийных процедурах, охватывают наиболее неблагоприятные условия. Члены экипажа должны уметь выполнять процедуры, выделенные жирным шрифтом, без обращения к контрольному списку. Характер и серьёзность возникшей аварийной ситуации будут диктовать необходимость полного соблюдения критических элементов. Поэтому очень важно, чтобы экипажи определяли правильный курс действий, используя здравый смысл и здравое суждение. Как можно скорее пилот должен уведомить WSO, диспетчера или ведущего группы, а также диспетчерскую вышку о любой существующей аварийной ситуации и о предполагаемых действиях.
В этом разделе используются термины «Приземлиться как можно скорее» и «Приземлиться как можно скорее практично». Эти термины определяются следующим образом:
Приземлиться как можно скорее - Будет объявлена аварийная ситуация. Посадка должна быть выполнена на ближайшем подходящем аэродроме с учётом серьёзности аварийной ситуации, погодных условий, оборудования аэродрома, окружающего освещения, массы самолёта и указаний командования.
Приземлиться как можно скорее практично - Аварийные условия менее срочные, и, хотя миссия должна быть прекращена, степень аварийной ситуации такова, что немедленная посадка на ближайшем подходящем аэродроме может не потребоваться.
Следующие основные правила применяются ко всем аварийным ситуациям на самолёте и должны быть тщательно изучены всеми членами экипажа:
- Поддерживайте управление самолётом.
- Проанализируйте ситуацию и примите соответствующие меры.
- Приземлитесь как можно скорее практично.
Объяснение используемой символики см. в разделе «Определения».
 Капитан (CPT) Дрю Нельсон, пилот самолёта F-4E Phantom II, и лейтенант (LT) Стивен Скиннер, офицер вооружения, оба из 336-й тактической истребительной эскадрильи, проверяют журнал технического обслуживания своего самолёта во время учений AMALGAM CHIEF'88. Учения являются проверкой способности ВВС перехватывать вражеские ракеты и самолёты в случае нападения на континентальную часть Соединённых Штатов
Капитан (CPT) Дрю Нельсон, пилот самолёта F-4E Phantom II, и лейтенант (LT) Стивен Скиннер, офицер вооружения, оба из 336-й тактической истребительной эскадрильи, проверяют журнал технического обслуживания своего самолёта во время учений AMALGAM CHIEF'88. Учения являются проверкой способности ВВС перехватывать вражеские ракеты и самолёты в случае нападения на континентальную часть Соединённых Штатов
💡 Этот раздел содержит только самые важные аварийные процедуры.
🚧 Этот раздел находится в стадии разработки.
Аварийные ситуации в полёте
Вывод из неуправляемого полёта
| Шаг | Система/состояние | Действие |
|---|---|---|
| 1 | РУЧКА УПРАВЛЕНИЯ | ВПЕРЁД |
| 2 | ЭЛЕРОНЫ И РУЛЬ НАПРАВЛЕНИЯ | НЕЙТРАЛЬНОЕ ПОЛОЖЕНИЕ |
| 3 | ЕСЛИ НЕ ВОССТАНОВЛЕНО | УДЕРЖИВАЙТЕ РУЧКУ УПРАВЛЕНИЯ ПОЛНОСТЬЮ ВПЕРЁД И ВЫПУСТИТЕ ТОРМОЗНОЙ ПАРАШЮТ |
| 4 | РУДы | IDLE (ХОЛОСТОЙ ХОД) (если не на малой высоте) |
Вывод из прямого штопора
| Шаг | Система/состояние | Действие |
|---|---|---|
| 1 | РУЧКА УПРАВЛЕНИЯ | УДЕРЖИВАЙТЕ ПОЛНОСТЬЮ ВПЕРЁД |
| 2 | ЭЛЕРОНЫ | ПОЛНОСТЬЮ ПРОТИВ ВРАЩЕНИЯ (СТРЕЛКА ПОВОРОТА) |
| 3 | САМОЛЁТ РАЗГРУЖЕН | ЭЛЕРОНЫ В НЕЙТРАЛЬНОЕ ПОЛОЖЕНИЕ |
| 4 | Если самолёт неуправляем на высоте 10 000 футов над уровнем земли или ниже | КАТАПУЛЬТИРОВАТЬСЯ |
Отказ двигателя в полёте
Отказ одного двигателя
| Шаг | Система/состояние | Действие |
|---|---|---|
| 1 | Воздушная скорость | МИНИМУМ 300 УЗЛОВ / 0,6 МАХА |
| 2 | Приземлиться как можно скорее |
Запуск в воздухе
| Шаг | Система/состояние | Действие |
|---|---|---|
| 1 | Главный переключатель двигателя | ON (ВКЛ) |
| 1 | РУД | OFF (ВЫКЛ) |
| 2 | Кнопка зажигания | УДЕРЖИВАТЬ НАЖАТОЙ |
| 3 | РУД | IDLE (ХОЛОСТОЙ ХОД) |
| 4 | Обороты двигателя, EGT, давление масла и расход топлива | КОНТРОЛИРОВАТЬ |
Механическая неисправность
| Шаг | Система/состояние | Действие |
|---|---|---|
| 1 | РУД неисправного двигателя | IDLE (ХОЛОСТОЙ ХОД) |
| 2 | Кнопка тестирования пожарной сигнализации | НАЖАТЬ |
Если ни один из индикаторов FIRE/OVERHEAT не загорается:
| 3 | Кнопка зажигания | УДЕРЖИВАТЬ НАЖАТОЙ |
Если неисправность двигателя всё ещё очевидна (вибрации, шумы, скачки и т.д.) или если двигатель отказал (недостаточные обороты или расход топлива для запуска):
| 3 | Генератор | OFF (ВЫКЛ) |
| 4 | РУД | OFF (ВЫКЛ) |
| 5 | Главный переключатель двигателя | OFF (ВЫКЛ) |
| 6 | Воздушная скорость | МИНИМУМ 300 УЗЛОВ / 0,6 МАХА |
| 7 | Приземлиться как можно скорее |
Отказ обоих двигателей в полёте
| Шаг | Система/состояние | Действие |
|---|---|---|
| 1 | Любой двигатель | ЗАПУСК В ВОЗДУХЕ |
| 2 | Селектор системы отсчёта | STBY (ОЖИДАНИЕ) |
Если ни один из двигателей не запускается:
| Шаг | Система/состояние | Действие |
|---|---|---|
| 3 | Состояние топлива | ПРОВЕРИТЬ |
| 4 | Главные переключатели двигателя | ПРОВЕРИТЬ, ЧТО ВКЛЮЧЕНЫ |
| 5 | Любой РУД | OFF (ВЫКЛ) |
| 6 | Другой двигатель | ЗАПУСК В ВОЗДУХЕ |
| 7 | Оставшийся двигатель | ЗАПУСК В ВОЗДУХЕ |
| 8 | Если ни один из двигателей не запускается | Удерживайте переключатели проверки насоса наддува в положении CHECK, вытаскивая автоматические выключатели левого и правого главного контура управления топливом (H3, J1, панель № 2), затем попытайтесь запустить в воздухе. |
Если ни один из двигателей не удаётся запустить:
| 9 | Катапультироваться |
Пожар или перегрев двигателя в полёте
| Шаг | Система/состояние | Действие |
|---|---|---|
| 1 | РУД неисправного двигателя | IDLE (ХОЛОСТОЙ ХОД) |
| 2 | Если сигнальная лампа гаснет, кнопка тестирования пожарной сигнализации | НАЖАТЬ |
| 3 | Если все индикаторы FIRE/OVERHEAT загораются при нажатии кнопки тестирования | ПРИЗЕМЛИТЬСЯ КАК МОЖНО СКОРЕЕ |
Если сигнальная лампа горит, система обнаружения не работает, виден дымовой след или подтверждён пожар:
| 4 | Поддерживайте минимальную скорость 300 узлов, ожидайте отказа вспомогательной гидравлики и избегайте поворотов в сторону неисправного двигателя. | |
| 5 | Генератор неисправного двигателя | OFF (ВЫКЛ) |
| 6 | РУД неисправного двигателя | OFF (ВЫКЛ) |
| 7 | Главный переключатель неисправного двигателя | OFF (ВЫКЛ) |
| 8 | Переключатель дозаправки топливом в воздухе | EXTEND |
| 9 | Если пожар не прекращается | КАТАПУЛЬТИРОВАТЬСЯ |
| 10 | Если пожар прекращается | ПРИЗЕМЛИТЬСЯ КАК МОЖНО СКОРЕЕ |
🟡 ВНИМАНИЕ: Не пытайтесь перезапустить неисправный двигатель. Если пожар прекратился, и необходимо выполнить посадку, выполните посадку на одном двигателе.
Помпаж компрессора
| Шаг | Система/состояние | Действие |
|---|---|---|
| 1 | РУД | IDLE (ХОЛОСТОЙ ХОД) |
Если помпаж не прекращается:
| 2 | Переключатель генератора | OFF (ВЫКЛ) |
| 3 | РУД | OFF (ВЫКЛ) |
| 4 | Входные клинья | ПРОВЕРИТЬ, ЧТО ПОЛНОСТЬЮ УБРАНЫ |
| 5 | Кнопка зажигания | УДЕРЖИВАТЬ НАЖАТОЙ |
| 6 | РУД | IDLE (ХОЛОСТОЙ ХОД) |
| 7 | Обороты двигателя, EGT, давление масла и расход топлива | КОНТРОЛИРОВАТЬ |
| 8 | Переключатель генератора | ON (ВКЛ) |
Дальность планирования
При отказе обоих двигателей самолёт будет планировать примерно 6 морских миль на каждые 5000 футов высоты над уровнем земли. Рекомендуемая воздушная скорость планирования для максимальной дальности с выключенными обоими двигателями составляет 215 узлов. Эта скорость позволит вращающимся от набегающего потока двигателям поддерживать давление в гидравлической системе управления мощностью в безопасных пределах, но может быть не оптимальной для запуска в воздухе.
Катапультирование
На уровне земли с горизонтальными крыльями, закрытым фонарём и без вертикальной скорости катапультирование может быть запущено на скорости от 0 до 550 узлов, если посадочная масса ни одного из членов экипажа не превышает 247 фунтов. Посадочная масса включает в себя члена экипажа и всё личное снаряжение, с которым он садится в самолёт. Если посадочная масса любого члена экипажа превышает 247 фунтов, минимальная воздушная скорость катапультирования составляет 50 узлов. Запускайте катапультирование на скорости ниже 450 узлов, если это возможно. Хотя кресло рассчитано на 600 узлов, катапультирование на скорости выше 450 узлов подвергает члена экипажа нагрузкам, которые могут привести к серьёзным травмам. Если воздушная скорость превышает 550 узлов, минимальная высота катапультирования составляет 50 футов. В управляемом горизонтальном полёте катапультируйтесь на высоте более 2000 футов над уровнем земли, если это возможно. Если самолёт неуправляем на высоте 10 000 футов над уровнем земли или ниже, катапультируйтесь.
АВАРИЙНЫЕ СИТУАЦИИ ПРИ ПОСАДКЕ
Посадка на одном двигателе
| Шаг | Система/состояние | Действие |
|---|---|---|
| 1 | Уменьшите массу самолёта до минимально практичной. | |
| 2 | Входной клин исправного двигателя | ПРОВЕРИТЬ, ЧТО ПОЛНОСТЬЮ УБРАН |
| 3 | Всё ненужное электрооборудование | OFF (ВЫКЛ) |
| 4 | Выполните полностью сконфигурированный заход на посадку с углом атаки 17 единиц |
Аварийная схема посадки
Аварийная схема посадки - это схема, по которой следует лететь, когда тяга двигателя доступна, и существует аварийная ситуация или неисправность, которая может привести к аварийной ситуации. Основная цель схемы - безопасно посадить самолёт с первой попытки с наименьшим риском. Из-за множества переменных, таких как тип аварийной ситуации, положение и высота относительно аэродрома, масса, оставшееся топливо, погода, населённые пункты, длина взлётно-посадочной полосы, наличие тормозного устройства и т.д., стандартную схему невозможно предписать. В зависимости от обстоятельств может быть желательно использовать GCA, выполнить прямой заход на посадку, войти в схему с попутного курса или предпосадочного курса или выполнить схему с разворотом на 360° над головой. Из-за различных обстоятельств оценка пилотом всех факторов и его суждение будут определять тип схемы посадки, по которой следует лететь. Однако есть некоторые общие рекомендации, которые применимы независимо от выбранного захода на посадку: Уменьшите массу до минимально практичной. В схеме и перед установкой конфигурации посадки поддерживайте минимальную скорость маневрирования 230 узлов (250 узлов на одном двигателе). Схему следует планировать так, чтобы избежать резких, крутых или жёстких поворотов, а также больших или резких изменений тяги, особенно при неисправности органов управления полётом или отказе гидравлической системы. Если позволяют обстоятельства, следует спланировать длинный прямой финальный заход на посадку и установить конфигурацию посадки, когда самолёт будет на финальном этапе. Переключатель дозаправки топливом в воздухе следует установить в положение EXTEND перед посадкой, чтобы сбросить давление в топливных баках. Если характер аварийной ситуации или другие факторы диктуют установку конфигурации посадки до финального этапа, следует поддерживать скорость 230 узлов - закрылки убраны, или 200 узлов - предкрылки/закрылки OUT AND DOWN (ВЫПУЩЕНЫ), до тех пор, пока самолёт не будет установлен на финальном этапе. Эти воздушные скорости обеспечат запас прочности для манёвренного полёта. Если в схему необходимо войти на попутном курсе, предпосадочном курсе или со схемы над головой, схему следует расширить, конфигурацию посадки установить до финального этапа, а выход на финальный этап должен быть не менее чем за 2-3 мили. Следует лететь по нормальной глиссаде 2-3°. Для большинства аварийных ситуаций воздушные скорости финального захода на посадку увеличиваются, а угол атаки уменьшается, чтобы обеспечить адекватные характеристики управляемости самолёта.
Заход на посадку с остановленным двигателем
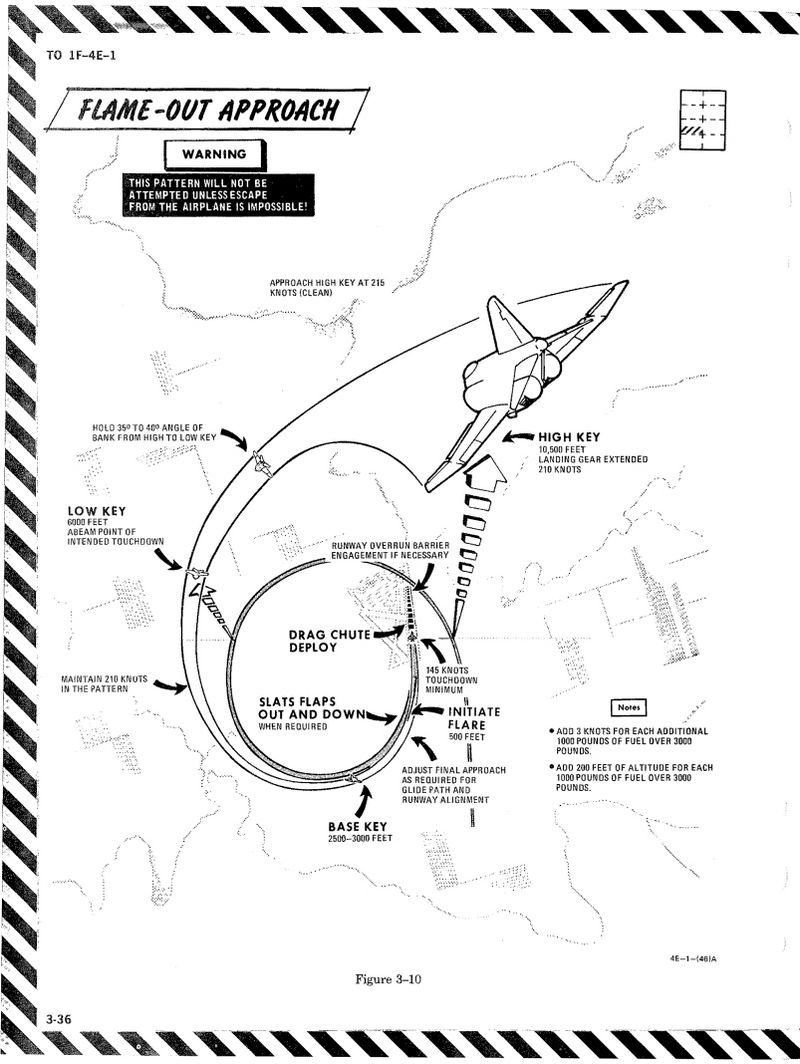
Дополнение
Сигнальные лампы/индикаторы
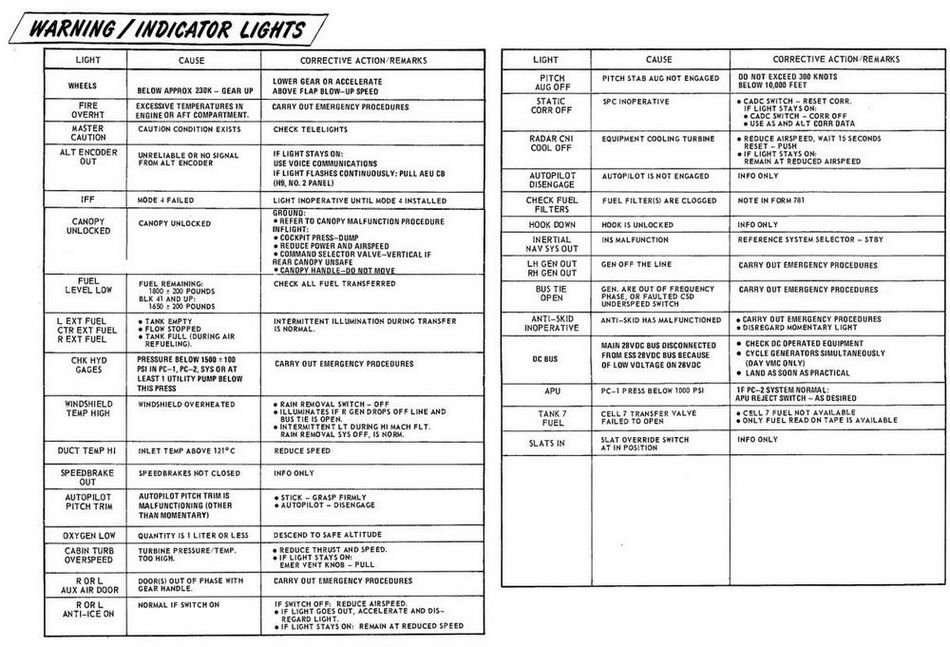
Распределение аварийного питания
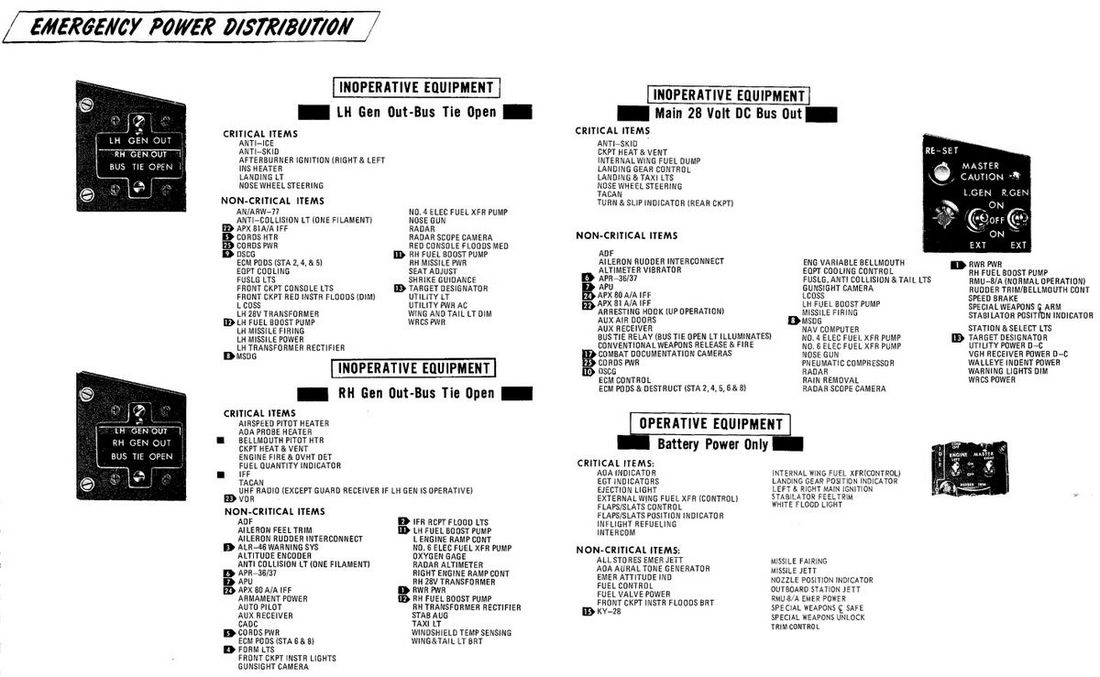
Зона запуска в воздухе
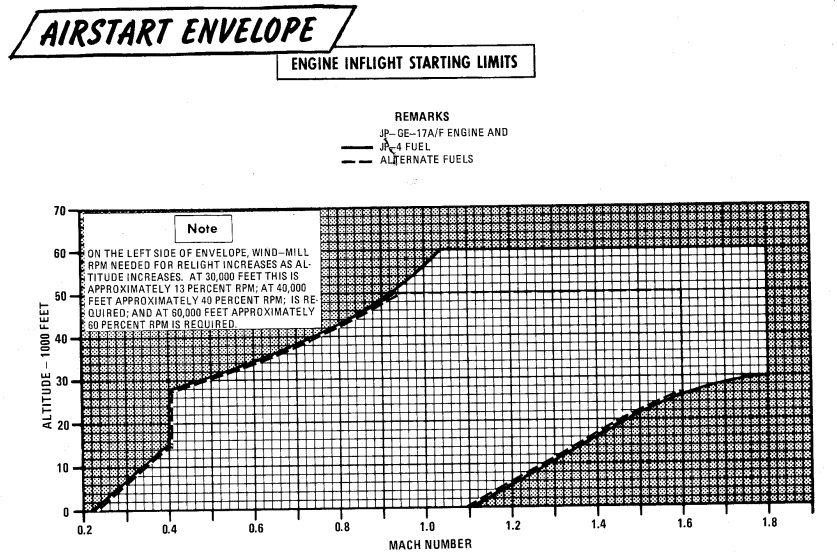
Таблица сброса
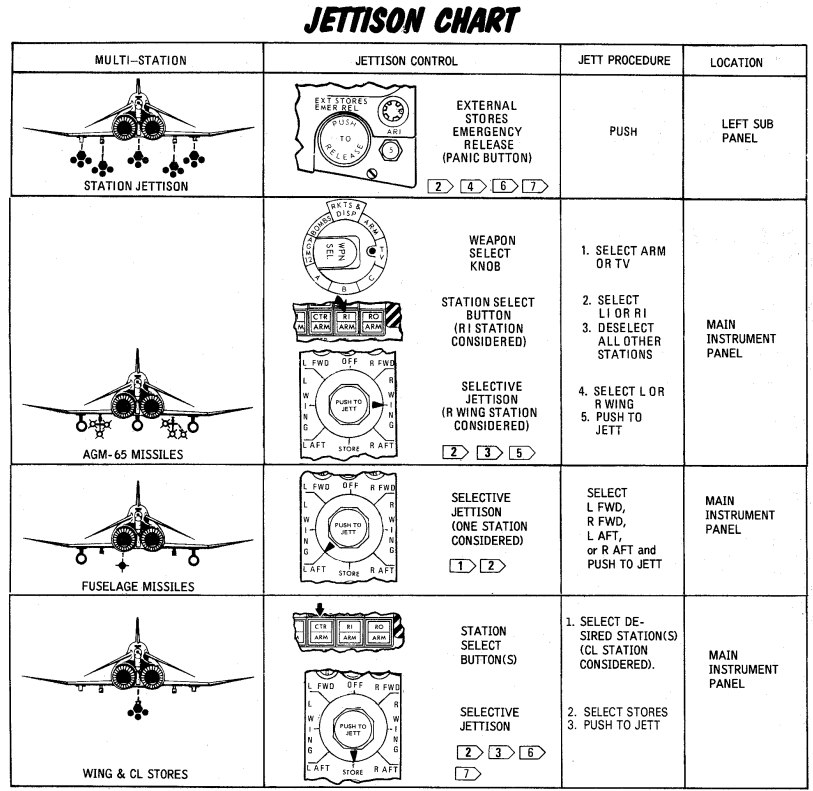
DCS
Эта глава содержит системы, настройки и интерфейсы, специфичные для симуляции Фантома в DCS.
Особого внимания заслуживает руководство по моддингу и объяснение, доступное для дизайнеров миссий.
 F-4 Phantom II в тематике двухсотлетия
F-4 Phantom II в тематике двухсотлетия
Управление
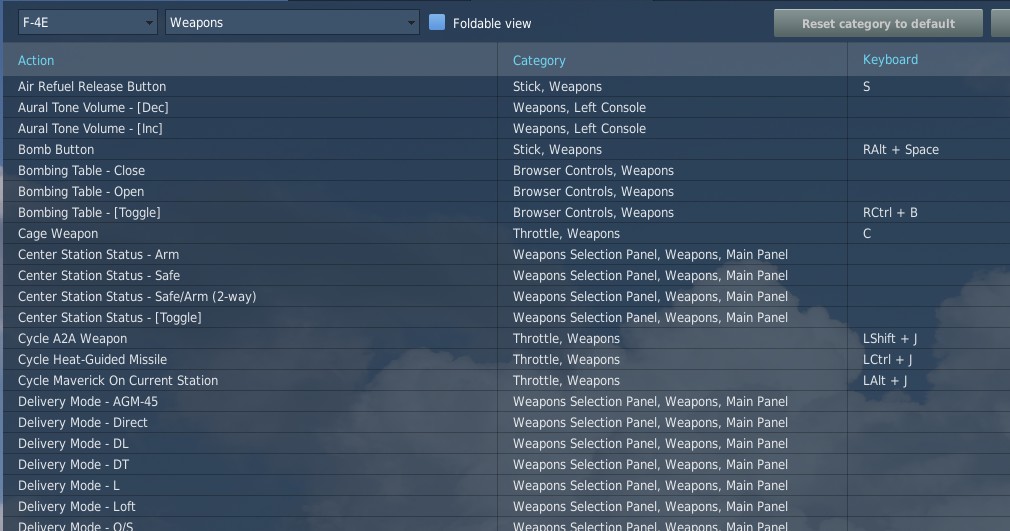
Доступные привязки управления для Фантома исчерпывающие. Для любого переключателя, ручки или кнопки можно выбрать прямые привязки положения, привязки увеличения или уменьшения, переключение или следующую опцию, специальные привязки для двухпозиционных или трёхпозиционных переключателей, а также назначаемые оси.
В общей сложности обе кабины имеют около 1000 назначаемых привязок и 200 осей каждая.
Например, переключатель Speed Brake (Воздушный тормоз) имеет 8 привязок:
- Speed Brake - In (Убран)
- Speed Brake - Stop (Остановлен)
- Speed Brake - Out (Выпущен) (Удержание)
- Speed Brake - [Назад]
- Speed Brake - [Вперёд]
- Speed Brake - [Следующий]
- Speed Brake - In/Stop (3-позиционный вверх)
Положение Out (Выпущен) отмечено (Удержание), чтобы сигнализировать о том, что положение подпружинено и вернётся в центр после отпускания.
Привязки [Назад] и [Вперёд] - это направленные привязки, которые перемещают переключатель из текущего положения в заданном направлении.
[Следующий] аналогичен, но не останавливается в последнем положении и переходит к первому положению. Аналогично, двухпозиционные переключатели имеют привязку [Переключение], которая переключает переключатель между двумя положениями.
Привязка (3-позиционный вверх) предназначена для использования с фактическими трёхпозиционными аппаратными переключателями, которые присутствуют на многих внешних устройствах. Они отправляют сигнал в любом положении (вверх и вниз), но не отправляют сигнал в центральном положении. Следовательно, привязка вернёт переключатель обратно в центр, когда сигнал не отправляется.
💡 Привязка (3-позиционный вниз) пропущена для Speed Brake (Воздушный тормоз), так как она будет идентична подпружиненной привязке Out (Hold) (Выпущен (Удержание)).
Всем привязкам обычно назначаются как минимум две категории поиска: система, к которой принадлежит привязка, и её местоположение в кабине. Например, переключатель Master Arm (Главное включение вооружения) имеет категории:
- Оружие
- Главная панель
- Панель выбора оружия
Sim-Pit
В дополнение к обычным привязкам предусмотрены специальные привязки [SimPit], которые позволяют управлять любым переключателем или ручкой с помощью ввода оси.
Например, переключателем с 2 положениями ON (ВКЛ) и OFF (ВЫКЛ) можно управлять с помощью оси, при этом переключатель меняет своё положение, как только ось перемещается за пределы своего центрального положения.
Это особенно полезно для создателей реплик кабины, работающих в основном с аппаратными переключателями, электронные компоненты которых отправляют нормализованные входные данные во всём диапазоне движения.
Команды Jester и наземного персонала
Прямые привязки для управления командами Jester и наземного персонала предоставляются специально для дизайнеров миссий или пользователей программного обеспечения распознавания голоса, такого как VoiceAttack.
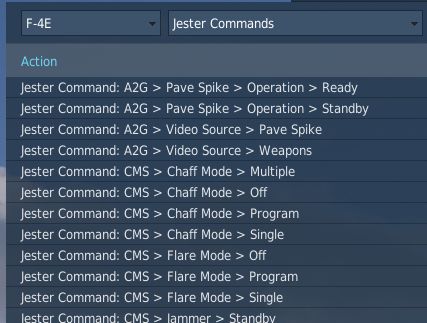
Это позволяет использовать соответствующие действия непосредственно через привязку вместо использования интерфейса для их выбора.
Руководство по привязкам
Когда вы только начинаете, часто возникает вопрос, какие основные органы управления следует привязать и сделать доступными без использования мыши, помимо очевидных привязок осей РУД и РУС.
💡 Элементы, выделенные жирным шрифтом, настоятельно рекомендуется привязать. Курсивные разделы - это предложения о том, какие позиции привязать.
Пилот
Пилот должен сосредоточиться на привязке основных органов управления полётом, а также переключателей, относящихся к бою.
Органы управления полётом
- РУС
- РУД
- Органы управления триммированием (4 + 2)
- Шасси
- Закрылки/предкрылки (Norm (Нормальное), Out (Выпущены), Out & Down (Выпущены и опущены))
- Воздушный тормоз (Out (Выпущен), Stop (Остановлен), In (Убран))
- Катапультирование
- Кнопка управления носовой стойкой шасси/автоматического захвата
- Тормозной парашют (Выпустить, отсоединить)
- Управление креслом (Вверх, вниз)
Запуск
Для выполнения последовательности холодного запуска представляют интерес следующие привязки:
- Команда наземного персонала: Внешнее питание > Подключить
- Команда наземного персонала: Источник воздуха > Подключить к правому/левому двигателю
- Команда наземного персонала: Источник воздуха > Запустить/остановить поток воздуха
- Команда наземного персонала: Источник воздуха > Зарядить пусковые патроны
- Переключатель запуска правого/левого двигателя (запускает пусковые патроны)
- Генератор правый/левый (ВКЛ, ВЫКЛ, Внешний)
- Главный переключатель правого/левого двигателя
- Зажигание правого/левого двигателя
- Упор холостого хода правого/левого двигателя
Бой
- Спусковой крючок (2-я ступень)
- Кнопка Bomb (Бомба)
- Наведение оружия (4)
- Мизинцевый переключатель (Gun (Пушка), Heat (Тепловая), Radar (Радар), Reject (Сброс))
- Кнопка CAGE
- Кнопка управления носовой стойкой шасси/автоматического захвата
- Режим DSCG (Radar (Радар), Off (Выкл), TV (Телевидение))
- Инструмент бомбометания
- Сброс средств противодействия
- Режим HUD (По часовой стрелке, против часовой стрелки)
- Режим доставки (По часовой стрелке, против часовой стрелки)
- Селектор оружия (По часовой стрелке, против часовой стрелки)
Навигация
- Ввод навигации (Следующий)
- Режим навигации (Следующий)
- Переключатель AFCS
- Переключатель удержания высоты
- Переключатель сброса дозаправки топливом в воздухе
Связь
- Переключатель микрофона (UHF, ICS)
- Канал COMM (Увеличить, уменьшить)
Jester
- Действие интерфейса Jester
- Контекстное действие Jester
WSO
Для WSO привязка органов управления полётом, таких как РУС, является необязательной. Органы управления должны быть сосредоточены на управлении радаром и прицельным контейнером Pave Spike.
Радар и Pave Spike
- Ручка управления антенной
- Спусковой крючок ручки управления антенной (Полунажатие, полное нажатие)
- Угол места антенны (Увеличить, уменьшить)
- Кнопка Challenge ручки управления антенной
- Режим экрана (По часовой стрелке, против часовой стрелки)
Органы управления радаром
- Усиление приёмника радара (Увеличить, уменьшить)
- Дальность радара (По часовой стрелке, против часовой стрелки)
- Аспект цели (Следующий)
- Режим радара (По часовой стрелке, против часовой стрелки)
Относящиеся к бою
- Сброс средств противодействия
- Выбор видеосигнала
- Режим "воздух-воздух" (CAGE)
- Кнопка Freeze (Фиксация)
- Кнопка ввода цели
- Перемещение курсора (Along/Cross Track) (Увеличить, уменьшить)
Органы управления навигацией
- Переключатель микрофона (UHF, ICS)
- Канал COM (Увеличить, уменьшить)
- Функция навигации (По часовой стрелке, против часовой стрелки)
Реальные органы управления
Здесь представлены фотографии реальных органов управления самолётом, собранные для справки. Для получения более подробной информации см. соответствующие подразделы 2. Обзор кабины, используя соответствующие гиперссылки.
РУС пилота

РУД пилота

РУС WSO

РУД WSO

Ручка управления антенной WSO

Специальные опции
Фантом предлагает несколько опций, которые можно установить в меню Специальные опции в DCS.
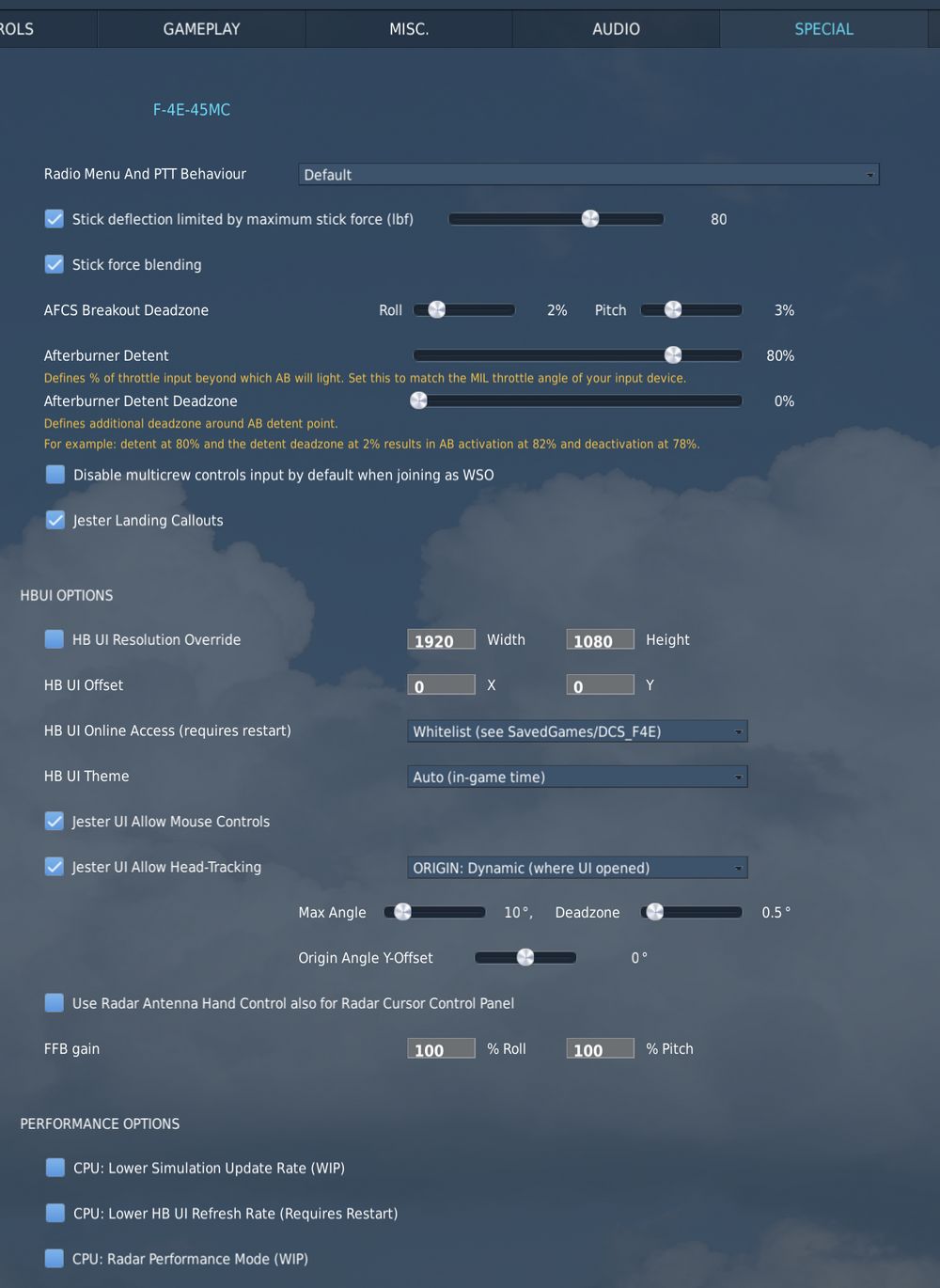
Radio Menu and PTT Behavior
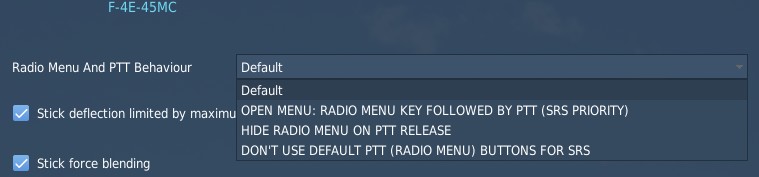
Выпадающее меню для выбора поведения привязки нажатия для разговора для радио.
| Опция | Закрыть меню | Меню должно быть открыто | Экспорт голоса |
|---|---|---|---|
| По умолчанию | ❌ | ❌ | ✅ |
| Открыть меню | ❌ | ✅ | ✅ |
| Скрыть при отпускании | ✅ | ❌ | ✅ |
| Без экспорта | ❌ | ❌ | ❌ |
Столбцы имеют следующие эффекты:
- Закрыть меню - при отпускании клавиши меню связи DCS автоматически закрывается.
- Меню должно быть открыто - клавиша работает только тогда, когда меню связи DCS в данный момент открыто.
- Экспорт голоса - при нажатии голос экспортируется в такие инструменты, как SRS.
Предел отклонения ручки
Ограничивает максимальное усилие в фунтах-силы (lbf), то есть силу, с которой пилот может тянуть ручку.
Этот эффект в основном проявляется при управлении самолётом во время манёвров с большой перегрузкой и может предотвратить случайное создание экстремальных перегрузок.
💡 Например, в некоторых ситуациях для того, чтобы полностью оттянуть ручку назад, потребуется сила, превышающая человеческие возможности. С этой настройкой, когда реальный джойстик тянется за этот предел, внутриигровой РУС ограничивается и не тянется так же далеко назад. Это также предотвращает, например, случайное создание 20 G и мгновенную потерю сознания только потому, что реальный джойстик не имеет или имеет ограниченную силовую обратную связь.
Сглаживание усилия на ручке
Когда максимальное движение ручки приведёт к созданию чрезмерных усилий, включение этой опции уменьшит создаваемое усилие для повышения точности управления, а также может помочь предотвратить случайное создание экстремальных перегрузок.
Мёртвая зона отключения AFCS
Процент ввода ручки (отдельно для крена и тангажа), после которого система AFCS распознает, что ручка пилота была перемещена из нейтрального положения триммера (переключатели датчика усилия замкнуты).
Это повлияет на работу канала крена и тангажа AFCS и предотвратит его борьбу с вашим вводом. То есть, когда вы перемещаете ручку за пределы этой мёртвой зоны, AFCS понимает, что пилот хочет взять управление, и AFCS перестанет пытаться корректировать движение. Отключение по крену временно отключит стабилизацию крена, а также удержание крена и удержание курса. Отключение по тангажу временно отключит удержание тангажа, а также удержание высоты.
💡 Эта мёртвая зона находится "поверх" мёртвой зоны оси DCS, поэтому чем больше базовая мёртвая зона, установленная на оси, тем меньше должна быть мёртвая зона отключения AFCS. Имейте в виду, что установка низких значений, таких как 0%, при уже низкой базовой мёртвой зоне может привести к тому, что некоторые функции автопилота не будут включаться, даже если отпустить ручку, потому что ручка может быть ещё не идеально нейтральной.
Значения по умолчанию - 1% для крена и 2% для тангажа.
💡 Чтобы проверить, активировано ли отключение в данный момент, можно использовать индикатор органов управления и посмотреть на текст под ним.
Дополнительную информацию см. в разделе «Датчик усилия».
Положение форсажа
Две опции для определения того, в какой точке ввода физического РУДа (от 0 до 100%) самолёт включит форсаж.
То есть, если установлено значение 80%, диапазон тяги MIL самолёта будет включаться между 0% и 80% вашего физического РУДа, а оставшиеся 20% будут управлять диапазоном форсажа.
Опцию мёртвой зоны можно использовать для разделения точек в диапазоне, в которых форсаж будет включаться и выключаться. Например, установка 20‰ для мёртвой зоны и 80% для положения форсажа приводит к включению форсажа при 82% и выключению при 78% ввода РУДа.
Отключить ввод органов управления в многопользовательском режиме при присоединении в качестве WSO
Если этот флажок установлен, при присоединении в качестве WSO в многопользовательском режиме с пилотом-человеком ваши локальные входные данные органов управления (РУС, педали руля направления и РУД) будут игнорироваться по умолчанию. Вы можете снова включить свой локальный ввод с помощью назначенной комбинации клавиш.
Озвучивание высоты при посадке Jester
Если эта опция включена, Jester будет помогать пилоту во время посадки, озвучивая высоту самолёта, аналогично тому, как это делается в гражданской авиации.
💡 Реальные WSO Фантома не помогали во время посадки.
HB UI
Переопределение разрешения
Элементы пользовательского интерфейса, такие как колесо Jester, руководство, виртуальный браузер и другие, масштабируются и позиционируются с помощью фиксированного разрешения, которое должно соответствовать разрешению внутриигровой поверхности, на которой они отображаются.
Если флажок снят, это разрешение определяется автоматически на основе настроек экрана. Однако в некоторых ситуациях, особенно при использовании VR или при наличии многомониторной установки, это автоматическое определение может завершиться ошибкой и рассчитать неправильное разрешение.
Если элементы интерфейса расположены неправильно, например, колесо Jester не отцентрировано или даже обрезано, проверьте эту настройку и отредактируйте разрешение вручную, пока интерфейс не будет отображаться правильно.
Смещение
Позволяет смещать интерфейс по горизонтали и вертикали. Положительные значения смещают его вправо или вниз, отрицательные - влево или вверх.
Обычно это значение следует оставлять равным 0 пикселей по умолчанию. Однако в некоторых случаях (например, при использовании VR и настройке рендеринга на ЛЕВЫЙ или ПРАВЫЙ глаз, при этом флажок "Использовать разрешение системы DCS" не установлен) возможно, что интерфейс будет обрезаться. Эта настройка позволяет вернуть интерфейс в поле зрения, но при этом нарушается правильное выравнивание интерфейса, например, интерфейс Jester будет отцентрирован на экране.
Доступ к доменам

Определяет, к каким доменам разрешён доступ HB UI.
Full (Полный) разрешает свободный просмотр, позволяя посещать любые веб-сайты с помощью виртуального браузера.
Опция по умолчанию Whitelist (Белый список) определяет, к каким сайтам можно получить доступ, с помощью файла белого списка. Разрешены только домены, соответствующие правилам, установленным в файле. Правила по умолчанию настроены для поддержки всех функций HB UI и нескольких полезных веб-сайтов для виртуального браузера, таких как YouTube.
Этот файл автоматически создаётся по адресу
C:\Users\John Doe\Saved Games\DCS_F4E\hbui_whitelist.txt
при первом запуске Фантома.
Выбор Offline (Офлайн) отключит виртуальный браузер и любые другие функции и элементы HB UI, которые требуют активного подключения к Интернету.
Тема
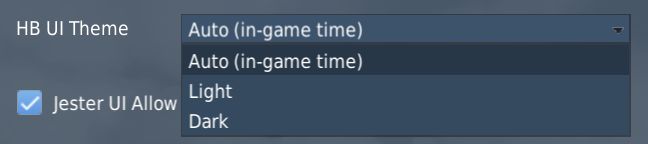
Позволяет выбрать цветовую тему, используемую интерфейсом. Все элементы интерфейса поддерживают светлую и тёмную темы.
Опция по умолчанию AUTO (АВТО) будет динамически выбирать тему на основе внутриигрового времени. Светлая днём и тёмная для ночной миссии.
Интерфейс Jester
Разрешить управление мышью
Если этот флажок установлен, интерфейс Jester позволяет взаимодействовать с мышью, перемещая её над элементами и щёлкая левой кнопкой мыши.
Опцию можно отключить, если, например, предпочтительно использовать только отслеживание головы, а автоматическое определение мыши, возможно, срабатывает слишком часто, например, когда мышь находится на подлокотнике кресла.
Разрешить отслеживание головы
![]()
Если этот флажок установлен, интерфейс Jester позволяет перемещать курсор, просто перемещая голову внутриигрового персонажа. Можно отключить, если нет удобного оборудования для отслеживания головы, такого как TrackIR или VR.
💡 Опции отслеживания выбираются динамически на основе движения. Даже если отслеживание головы включено, другие опции, такие как использование мыши или назначение курсора на ось, также доступны.
Выпадающее меню позволяет выбрать поведение отслеживания головы:
- Center (Центр) - начало обзора находится в центре самолёта.
- Dynamic (Динамический) - начало обзора находится там, где был открыт интерфейс.
Выбор Center (Центр) требует смотреть вперёд при работе с интерфейсом, в то время как Dynamic (Динамический) позволяет использовать отслеживание головы из любого положения обзора. Однако Dynamic (Динамический) может привести к тому, что придётся гоняться за курсором при частом закрытии и повторном открытии интерфейса. Кроме того, опция Dynamic (Динамический) менее значима в VR, так как элементы интерфейса всегда отображаются спереди.
💡 Диалоги Jester всегда используют тип Center (Центр), требуя смотреть вперёд.
Max Angle (Максимальный угол)
Определяет угол (в градусах), на который нужно повернуть голову от центра, чтобы достичь углов интерфейса.
Другими словами, уменьшение этого значения с 10° по умолчанию делает отслеживание головы более чувствительным к движению головы, а увеличение - уменьшает чувствительность.
💡 Пользователям VR может быть удобнее использовать меньший угол, так как преобразование головы в игру обычно 1:1 в VR.
Deadzone (Мёртвая зона)
Определяет угол (в градусах), на который нужно повернуть голову от центра, чтобы интерфейс распознал движение головы и включил отслеживание головы.
Если голова перемещается на угол меньше мёртвой зоны (0,5° по умолчанию), курсор автоматически устанавливается в центр и не перемещается.
💡 Пользователям, играющим с высоким и очень чувствительным преобразованием головы в игру, может быть полезно немного увеличить это значение.
Origin Angle Y-Offset (Смещение по вертикали угла начала координат)
Определяет смещение (в градусах) для вертикального смещения центральной точки отслеживания головы. Положительные значения смещают её вверх, отрицательные - вниз. Настройка по умолчанию - 0°.
Эта настройка может быть полезна, если центральная точка не должна быть правильно выровнена с естественным прямым обзором. То есть, когда вы открываете меню из естественного положения головы, а курсор уже показывает смещение вместо того, чтобы быть отцентрированным, настройка этого параметра устраняет проблему.
Ручка радара для курсора
Если этот флажок установлен, привязки, назначенные для управления ручкой управления антенной, также можно использовать для перемещения курсора, используемого для бомбометания со смещением и т.п., что делает привязку двух колёс отслеживания ненужной.
Коэффициент усиления FFB
Для пользователей с джойстиками с силовой обратной связью эту настройку можно использовать для регулировки коэффициента усиления сил по каждой оси.
Настройка по умолчанию - 100% для осей крена и тангажа. Большие значения увеличат усилие, используемое джойстиком, а меньшие значения уменьшат его.
Снизить частоту обновления симуляции
Эта экспериментальная опция позволяет снизить частоту обновления большинства компонентов самолёта.
Это может снизить нагрузку на ЦП, улучшая производительность игры для машин, которые ограничены своим ЦП.
Однако это может привести не только к визуальным дефектам, таким как более медленное воспроизведение анимации, но и к ухудшению работы некоторых систем. Например, Pave Spike, работающий медленнее, больше не может обновлять свой алгоритм стабилизации по земле достаточно быстро. Поэтому включение этой опции может вызвать проблемы и привести к ошибкам.
Снизить частоту обновления HB UI
Если этот флажок установлен, все элементы HB UI отображаются со значительно меньшей частотой.
Это может помочь повысить производительность при отображении элементов HB UI за счёт снижения нагрузки на ЦП. Однако это также может привести к тому, что анимация интерфейса будет выглядеть неплавно.
Встроенное руководство

Это руководство встроено в игру, и его можно читать во время полёта.
Оно также предлагает способ объяснения переключателей в кабине непосредственно путём открытия руководства, прокрученного прямо к месту, объясняющему соответствующий переключатель.
Управление
Привязку по умолчанию M можно использовать для включения/выключения руководства. Если удерживать её нажатой, щёлкая по переключателю в кабине, руководство автоматически откроется и прокрутится до раздела, объясняющего этот переключатель.
Кроме того, также доступны следующие привязки:
- RSHIFT + M - открыть руководство
- RCTRL + M - закрыть руководство
- RALT + M - включить/выключить руководство
💡 Чтобы закрыть руководство, сначала убедитесь, что вы убрали фокус клавиатуры с него, щёлкнув в любом другом месте кабины.
Калькулятор бомбометания
Калькулятор бомбометания предоставляет пилоту и WSO простой способ расчёта необходимых значений для различных режимов бомбометания. Вы можете использовать его для расчёта всех значений (кроме коэффициента сопротивления), которые вам нужны для точного сброса боеприпасов на цель. Он открывается с помощью горячей клавиши RCtrl+B и может быть закрыт той же горячей клавишей в игре. Вы также можете привязать его к нужной кнопке на вкладке управления.
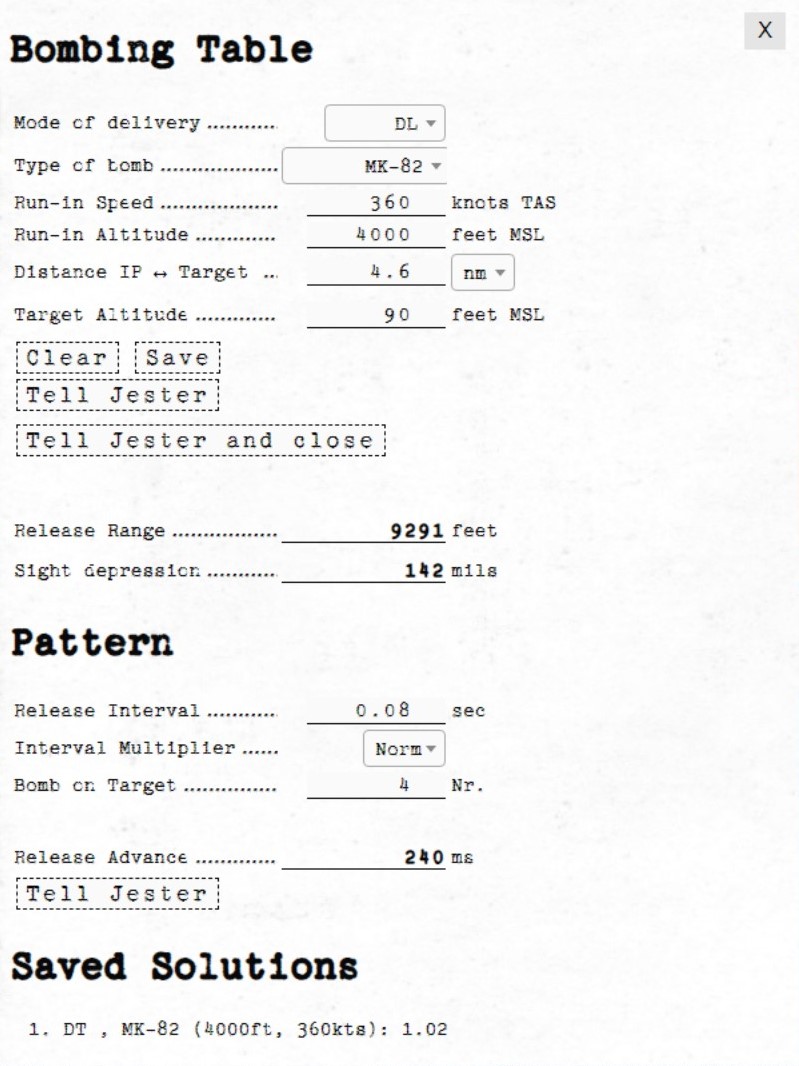
Таблица бомбометания
Ввод
Режим доставки
Первое, что нужно выбрать, - это режим доставки. Вы можете выбрать один из следующих режимов в зависимости от вашего захода на атаку.
- Прямой сброс (Direct)
- Пикирующий сброс (Dive Toss, DT)
- Поиск цели (TGT Find)
- Пикирующий сброс с выравниванием (Dive Laydown, DL)
- Сброс с выравниванием (Laydown, L)
- Со смещением (Offset)
- Лофтирование (Loft)
- Сброс через плечо (Over-the-shoulder, O/S)
- Мгновенный сброс через плечо (Over-the-shoulder instantaneous, O/S INST)
Тип бомбы
В разделе выбора типа бомбы вы можете выбрать, какой боеприпас вы хотите сбросить. Всегда выбирайте правильный боеприпас, чтобы получить правильные результаты. Вы можете выбрать из следующего списка:
- MK-81
- MK-82
- MK-83
- MK-84
- M117
- CBU-87
- MK-82 AIR
- MK-82 Snakeye (SNK)
- BLU-107
Скорость захода
Устанавливает скорость, с которой вы хотите лететь от точки входа до сброса бомбы. Скорость - это истинная воздушная скорость, и её можно установить с шагом 5 узлов на щелчок.
Высота захода
Устанавливает высоту, на которой вы хотите начать бомбометание. Высоту захода необходимо поддерживать от точки опознавания до сброса бомбы. Вы можете установить её с шагом 100 футов на щелчок.
Расстояние IP <-> Цель
Устанавливает расстояние между точкой опознавания и точкой цели. Вы можете выбрать либо установку в морских милях с шагом 0,1 морской мили, либо переключить единицу измерения на футы с помощью выпадающего списка справа. Шаг в футах составляет 100 футов на щелчок. Преобразование единиц измерения также преобразует ваш фактический ввод.
Высота цели
Устанавливает высоту цели в футах над уровнем моря. Вы можете установить её с шагом 10 футов на щелчок.
Угол пикирования
Устанавливает желаемый угол пикирования для захода на атаку. Можно установить с шагом 1° на щелчок. Необходимо установить в режимах Direct и Dive Toss.
Угол лофтирования
Устанавливает желаемый угол лофтирования для захода на атаку. Можно установить с шагом 1° на щелчок. Используется только для режимов LABS.
Также необходимо установить на панели LABS.

Вывод
Как правило, калькулятор бомбометания выдаёт только те выходные данные, которые вам нужно установить для выбранного захода на атаку.
Таймер набора высоты
Даёт вам рассчитанное время таймера набора высоты в секундах, которое WSO может ввести в компьютер ARBCS.

Дальность сброса
Даёт вам рассчитанную дальность бомбометания в футах, которую WSO может ввести на панель WRCS.

Снижение прицела
Даёт вам рассчитанное ручное снижение прицела в мил.
Это можно ввести в ручку снижения прицела, чтобы выровнять сетку с целью для ручного решения бомбометания по мил.

Коэффициент сопротивления
Даёт вам коэффициент сопротивления, который WSO затем может установить на панель WRCS.

N/S WRCS и E/W WRCS
Даёт вам рассчитанные значения расстояния смещения, которые WSO затем может установить на панель WRCS.

Управление
Очистить
Сбрасывает все входные данные до стандартных значений.
Сохранить
Сохраняет текущее решение на вкладке «Решения бомбометания» в конце страницы.
Tell Jester (Сказать Jester) и Tell Jester and close (Сказать Jester и закрыть)
С помощью этой кнопки значения, рассчитанные калькулятором бомбометания, можно передать Jester. Он либо подтвердит ввод, либо скажет вам «не могу сделать», если ввод неверен.
Схема
Позволяет вводить значения для расчёта упреждения сброса.
Ввод схемы
Интервал сброса
Устанавливает интервал сброса, который устанавливает пилот. Вы можете установить его с шагом 0,01 на щелчок.
Множитель интервала
Устанавливает множитель интервала, который устанавливает пилот. Вы можете выбрать «Norm» (Нормальный) или «x10» в выпадающем списке.
Бомба на цель
Позволяет выбрать номер бомбы, которой вы хотите поразить цель. Каждая бомба до выбранной бомбы будет попадать перед целью. Остальные бомбы будут попадать за цель.
Вывод схемы
Упреждение сброса
Даёт вам рассчитанное упреждение сброса, которое WSO может ввести.
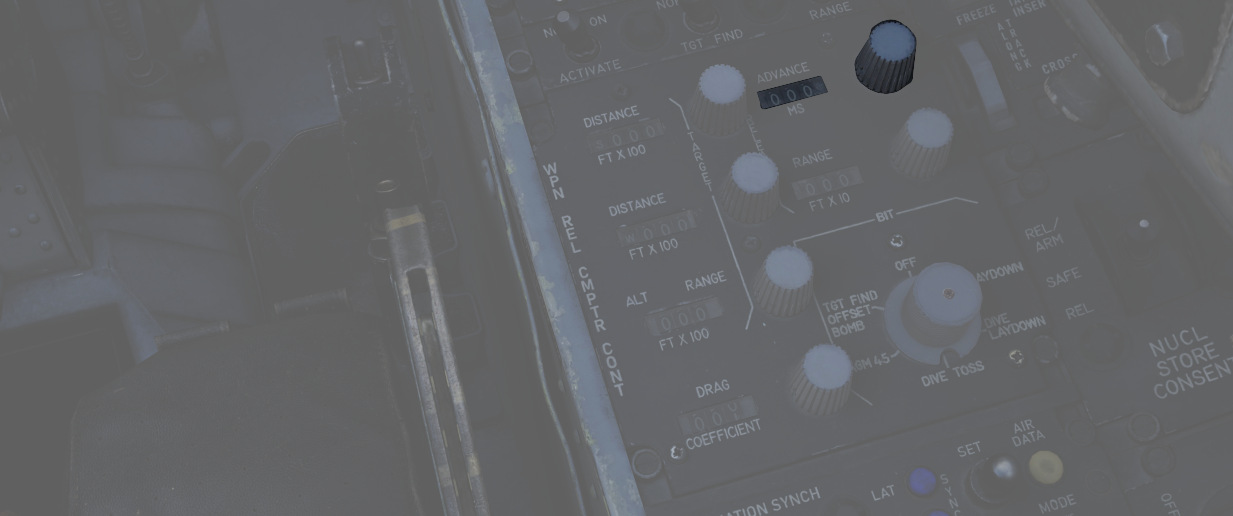
Решение бомбометания
Показывает последние сохранённые решения бомбометания. Строка показывает входные данные следующим образом:
- Режим доставки
- Тип бомбы
- Высота захода
- Скорость захода
В зависимости от режима он также сохранит соответствующие решения, необходимые для выполнения захода на атаку.
Пример запуска
Это пошаговое руководство по примеру бомбометания с лофтированием 12 Mk-82. В нашем случае мы хотим, чтобы четвёртая бомба попала в цель. Первые три должны попасть перед целью, а остальные - за цель. Для этого мы будем использовать упреждение сброса.
Планирование: упреждение
Первый шаг в планировании нашего бомбометания с лофтированием - это идентифицировать и выбрать цель. В этом примере мы хотим бомбардировать красные подразделения, стоящие на X.
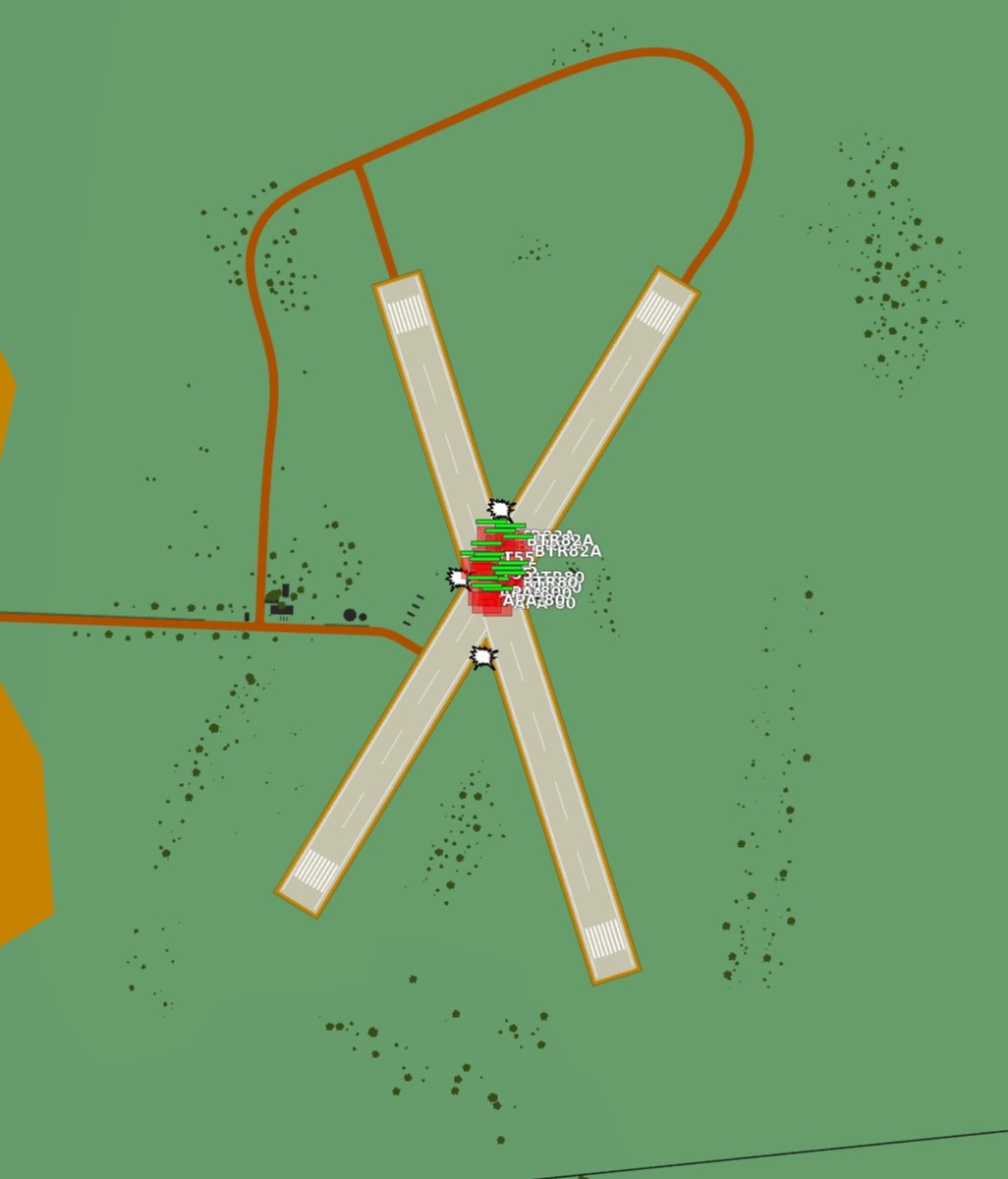
Планирование: IP
На втором шаге мы посмотрим на карту F10 и выберем точку опознавания (IP).
💡 IP всегда должна быть хорошо видна во время полёта на самолёте, так как визуальная идентификация IP будет основным методом определения времени нажатия кнопки сброса бомбы.

Для нашей цели мы выбрали озеро к северу от цели в качестве IP. Теперь мы измеряем расстояние от нашей IP до цели и записываем его, так как нам нужно ввести его в калькулятор бомбометания. В этом случае расстояние составляет 4,03 морских мили, которое мы округлим до 4 морских миль, так как калькулятор бомбометания может принимать только десятые доли мили.
Планирование: цель
Теперь нам также нужно записать высоту цели над уровнем моря. Чтобы получить эту информацию, мы просто щёлкаем по подразделению и считываем высоту из поля в левом нижнем углу. В этом случае высота цели составляет 32 фута, которую мы округлим до 30 футов, так как калькулятор бомбометания может принимать только значения, кратные десяти.
💡 Если целевое подразделение не видно на карте F10, вы также можете навести курсор на положение вражеского подразделения и прочитать высоту рядом с координатами в левом верхнем углу карты.
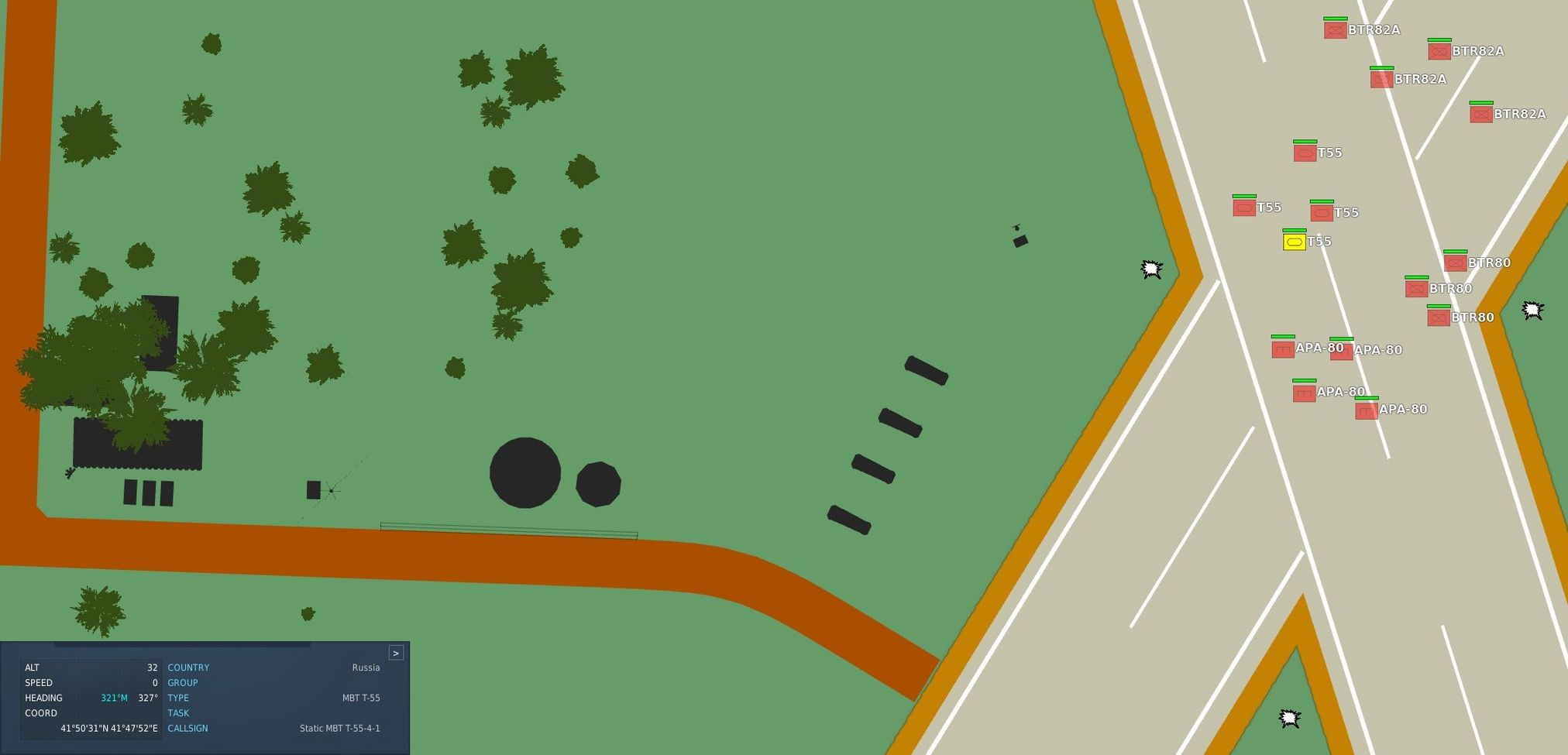
Решение
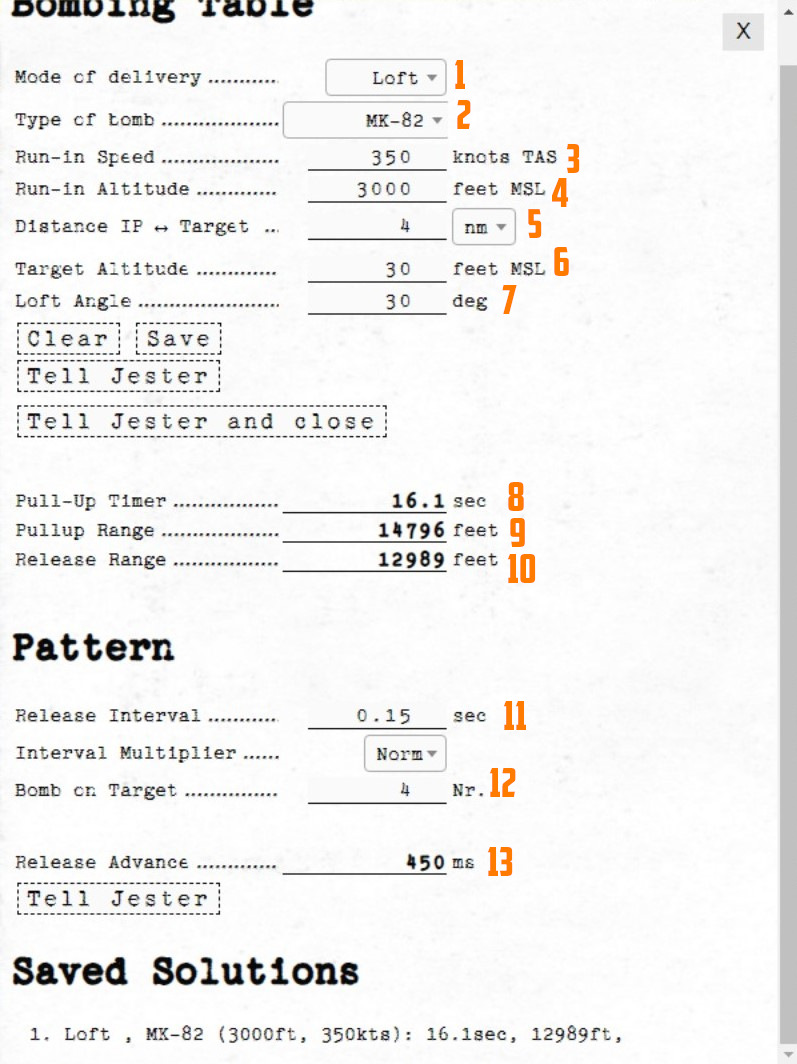
Теперь, когда у нас есть все необходимые значения с карты, мы введём их в калькулятор бомбометания.
(1) Здесь мы можем выбрать режим доставки, который в нашем примере является LOFT.
(2) Здесь мы выбираем тип нашей бомбы. В нашем случае это Mk-82.
(3) Мы хотим выполнить заход на истинной воздушной скорости 350 узлов.
(4) Для нашей высоты захода мы хотим, чтобы она была 3000 футов над уровнем моря.
(5) Мы измерили расстояние между нашей точкой входа и целью ранее на втором шаге. Теперь мы введём его.
(6) Мы получили высоту цели с карты F10 и теперь можем ввести её.
(7) Мы хотим, чтобы наш угол лофтирования был 30°, мы вводим это значение.
(8) Калькулятор бомбометания теперь выдаёт нам таймер набора высоты, который WSO может затем ввести на более позднем этапе. В качестве альтернативы его можно передать с помощью кнопки «Tell Jester and close» (Сказать Jester и закрыть) или «Tell Jester» (Сказать Jester).
(9) Калькулятор бомбометания также выдаёт нам дальность набора высоты. Это только для информации пилота.
(10) Кроме того, в качестве информации для пилота калькулятор бомбометания выдаёт нам дальность сброса.
(11) Мы хотим сбросить наши бомбы с интервалом сброса 0,15 секунды, поэтому мы вводим это значение.
(12) Как мы решили в начале, мы хотим, чтобы четвёртая бомба попала в цель.
(13) В окне упреждения сброса калькулятор бомбометания теперь выдаёт нам значение, которое WSO может ввести позже.
Настройка
Теперь WSO может ввести угол лофтирования в угол сброса, таймер набора высоты в таймеры бомбометания и упреждение сброса в упреждение сброса в WRCS.
Выполнение
Теперь вам нужно только выполнить манёвр для доставки Loft как можно точнее, чтобы убедиться, что вы точно поразите цель. Чем точнее вы летите, тем точнее будет ваше бомбометание.
Жирный карандаш
Оба члена экипажа могут использовать жирный карандаш, чтобы рисовать на боковой поверхности своего фонаря.
Интерфейс можно открыть, щёлкнув по соответствующему месту на правой передней стороне фонаря.

Удержание левой кнопки мыши позволяет рисовать, а правая кнопка мыши будет использовать ластик.
После закрытия окна повторным щелчком по месту на фонаре результат отображается на фонаре.

💡 Из-за ограничений движка изображение не синхронизируется в многопользовательской игре и не видно из внешнего вида.
Круг наблюдения
Чтобы помочь в координации экипажа, во время запуска и планирования часто используется метод выбора статического объекта на расстоянии, такого как здание, транспортное средство или дерево, и рисования круга вокруг него.

Круг, нарисованный пилотом и WSO, теперь будет примерно указывать в одном и том же направлении, и, оказавшись в воздухе, его можно использовать для улучшения координации.
Например, если пилот обнаруживает цель, он может сказать WSO:
"Есть цель в 100 метрах справа от круга."
Теперь WSO может использовать свой маркер круга, чтобы найти нужное место.

Виртуальный браузер
Чтобы улучшить изучение самолёта в полёте или просто скоротать время, можно открыть виртуальный браузер (по умолчанию RCTRL+V).
Браузер позволяет пользователям:
- смотреть обучающие видео,
- читать документацию, предоставленную третьими лицами,
- слушать плейлист музыки во время полёта,
- или даже играть в некоторые браузерные игры и многое другое.
Интерфейс встроен в игру, его можно изменять и перемещать. Кнопки в левом верхнем углу позволяют быстро перемещаться.
💡 Чтобы разрешить свободный просмотр, выберите Full (Полный) для специальной опции HB UI Domain Access.
Сессия
Данные сессии запоминаются и сохраняются локально в папке, например:
C:\Users\John Doe\Saved Games\DCS_F4E\cache\
Очистка этой папки сбросит все настройки и параметры браузера.
При необходимости уровень звука браузера можно регулировать с помощью микшера громкости, предоставляемого Windows, через запись HeatblurUi.exe.
Регистраторы
Самолёт оснащён несколькими записывающими устройствами, такими как AVTR или фотопулемёт.
Они способны записывать внутриигровые кадры, которые доступны вне игры в папке Saved Games. Возможный путь может выглядеть, например, так:
C:\Users\John Doe\Saved Games\DCS_F4E\recorders\
Бортовой видеомагнитофон
AVTR записывает кадры в папку
C:\Users\John Doe\Saved Games\DCS_F4E\recorders\avtr\
в виде файлов PNG каждые три секунды, если он активирован. Каждая кассета может записывать до 20 минут видеоматериалов и, если она не размотана, перезапишет ранее записанные видеоматериалы.
💡 Это ограничивает видеоматериалы 400 файлами, каждый из которых имеет размер от 50 КБ (радар) до 400 КБ (телевидение), что в сумме составляет 160 МБ.
Подробнее о том, как управлять устройством, см. 2.1.10.3 Система AVTR и 2.2.2 Управление AVTR.
Кассетный плеер
Хотя в реальном Фантоме его нет, наш самолёт оснащён кассетным плеером, чтобы слушать и качаться под отличные мелодии в полёте!
Поэтому бортовой видеомагнитофон работает как диктофон и, если вставить специальную музыкальную кассету, как музыкальный плеер.

💡 Песни также можно найти в самом высоком качестве в
<Папка установки DCS>\Mods\aircraft\F-4E\Music\Of Ghosts and Thunder (Meteor F-4 OST)>.
Управление
AVTR и большинство его органов управления находятся справа от кресла пилота, подробнее см. 2.1.10.3 Система AVTR. Индикаторы состояния и его переключатель режима находятся на главной панели в кабине WSO, см. 2.2.2 Управление AVTR.
💡 Jester может установить режим из своего интерфейса в разделе "Системы > AVTR Recorder".
Чтобы заменить кассеты, сначала необходимо выключить AVTR, установив его режим в OFF. Затем можно нажать кнопку EJECT, чтобы открыть держатель кассеты.
После того, как кассета извлечена, её можно заменить, щёлкнув по ней. Вставьте кассету обратно, щёлкнув левой кнопкой мыши по держателю.
При загруженной музыкальной кассете песни можно воспроизводить, установив переключатель режима в положение RECORD. Индикатор RECORDER ON рядом с левым коленом пилота указывает на состояние, а его вращение регулирует громкость.
AVTR показывает текущий воспроизводимый саундтрек на своём дисплее для прошедшего времени, например, M01 для первого трека. Трек можно пропустить, используя либо кнопку UNTHREAD, либо щёлкнув по индикатору RCD/EOT в кабине WSO.

Если кассета закончила воспроизведение всех песен, индикатор EOT загорается, и явная команда на следующий трек снова запустит первый трек.
Пользовательские песни
Кассетный плеер автоматически извлекает любую песню, найденную в
<Папка установки DCS>\Mods\aircraft\F-4E\Sounds\TapePlayer
и воспроизводит их в алфавитном порядке.
Обратите внимание, что для DCS необходимо, чтобы каждая песня также была настроена как файл SDEF в
<Папка установки DCS>\Mods\aircraft\F-4E\Sounds\sdef\TapePlayer
Чтобы добавить свои собственные песни, просто поместите их в указанную выше папку и создайте соответствующий файл SDEF. Не забудьте перезапустить DCS, так как звуки загружаются во время запуска игры.
💡 Если у вас возникли проблемы с работой пользовательской песни, попробуйте использовать формат файла OGG для звукового файла. Также убедитесь, что имена файлов не содержат специальных символов Unicode, таких как
·или你好, DCS может вылететь из-за них.
Персонаж
Настройка
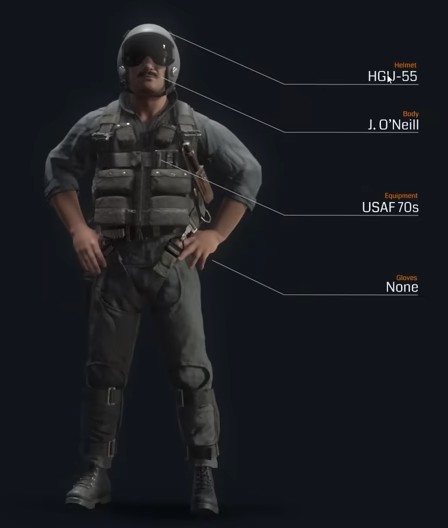
Персонажа пилота и WSO можно настроить через внутриигровое меню, например, выбрав один из множества доступных шлемов.
🚧 Настройка персонажа будет доступна позже во время раннего доступа.
Режим селфи
Чтобы сделать отличные скриншоты, можно войти в специальный режим селфи с помощью назначаемой специальной привязки.
В этом режиме модель персонажа отображается, даже если игрок в данный момент находится в режиме вида от первого лица (F1).
Затем камеру можно переместить, например, вперёд с помощью стандартных органов управления DCS:
- RCtrl + RShift + 8 (NumPad): Вверх
- RCtrl + RShift + 2 (NumPad): Вниз
- RCtrl + RShift + 4 (NumPad): Влево
- RCtrl + RShift + 6 (NumPad): Вправо
- RCtrl + RShift + / (NumPad): Вперёд
- RCtrl + RShift + * (NumPad): Назад
Вид можно вернуть обратно к пилоту, используя LAlt + C, а затем используя мышь.

Кроме того, существует ещё одна специальная привязка для фиксации движения модели персонажа.
Редактор миссий
F-4 имеет несколько специальных опций, выбираемых в редакторе миссий.
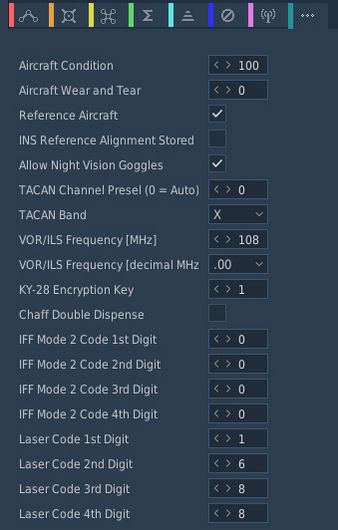
Состояние и износ
"И я вам скажу, что, поскольку Кэл за ним следит, он летал только в утверждённых перелётах и учениях выходного дня. В идеальном состоянии, ребята, без перегрузок."
Все компоненты самолёта имитируют износ индивидуально, создавая уникальный опыт при каждом появлении, а также в зависимости от того, как управляется F-4.
Обычно различают состояние и износ, оба являются динамическими при появлении и могут изменяться в течение миссии под воздействием различных факторов, таких как силы, температура, а также боевые повреждения.
Самолёт имеет тысячи компонентов, которые подвержены этой системе. Одним из конкретных примеров может служить скорость двигателя угла места прицельного контейнера Pave Spike. В идеальном состоянии он должен иметь скорость 60 градусов в секунду. Однако завод обычно не может гарантировать, что это всегда будет так, и допускает отклонение, например, оно должно быть в пределах 1% ошибки.
Математически отклонение моделируется как нормальное распределение, состоящее из параметров
- μ (мю, среднее значение) - значение, которое оно имело бы в идеальном состоянии
- σ (сигма) - отклонение значения
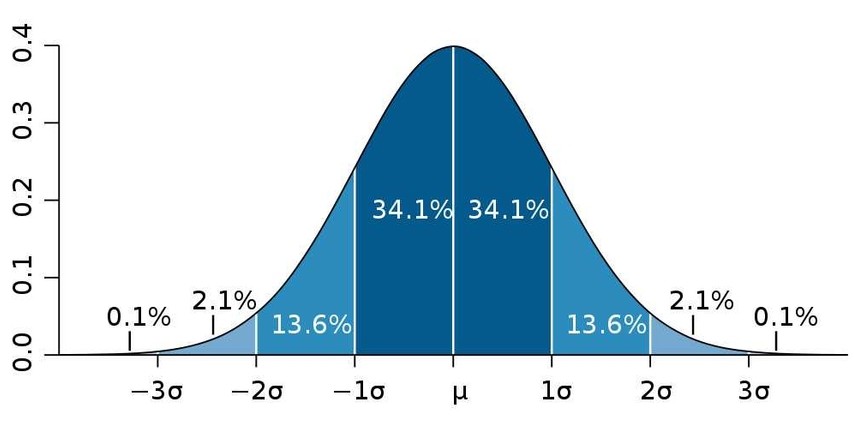
Примерно в 70% случаев значение будет находиться в пределах одной единицы σ, в 95% случаев - в пределах 2 единиц σ. Экстремальные случаи, превышающие 3 единицы σ, возможны, но очень редки.
Указанный двигатель имеет, например, значение σ 3% около 60 градусов в секунду, что означает, что подавляющее большинство прицельных контейнеров будет производиться с двигателем, способным перемещать подвес угла места со скоростью от 58 до 62 градусов в секунду.
💡 Отклонение идёт в обе стороны, ваш Фантом также может быть быстрее, чем он должен быть.
Состояние самолёта
Состояние самолёта обычно относится к его заводскому качеству и качеству производства. Например, во время войны у завода могут закончиться материалы, и он может снизить свои критерии приёмки во время производства, что в целом увеличит отклонение в характеристиках отдельных компонентов.
Дизайнеры миссий могут управлять этим аспектом с помощью ползунка Aircraft Condition (Состояние самолёта), который указывает качество от 0% (низкое качество) до 100% (высокое качество).
Для двигателя Pave Spike это означает, что при установке значения 0% его отклонение скорости σ увеличится с 3% до 8%, в результате чего большинство контейнеров будет производиться со скоростью от 55 до 65 градусов в секунду.
Состояние самолёта всегда будет находиться в пределах, которые производитель может считать разумно приемлемыми. Самолёт всегда полностью функционален и работоспособен.
Износ самолёта
В дополнение к качеству производства компоненты могут изнашиваться во время эксплуатации в зависимости от времени, прошедшего с момента последнего капитального ремонта, внешних факторов, таких как температура и погода, агрессивного пилотирования, связанного с большими нагрузками на планер, а также боевых повреждений.
Дизайнеры миссий могут управлять этим аспектом с помощью ползунка Aircraft Wear and Tear (Износ самолёта), который указывает износ от 0% (нет износа) до 100% (сильный износ) или даже больше. Для самолёта, который только что был отремонтирован и вышел из эксплуатации, подходит 0%. 100% относится к последней точке, в которой самолёт разумно будет отправлен обратно на техническое обслуживание, так как он начинает работать менее эффективно на практике. Значения, превышающие 100%, например, 500%, можно использовать для представления сценариев, в которых пилоты вынуждены летать на самолёте, который работает исключительно ниже ожидаемого уровня производительности. Он всё ещё в какой-то мере пригоден для использования, ничто не сломано, но компоненты просто больше не работают в пределах допустимых параметров.
💡 Значения, превышающие 100%, нельзя установить в редакторе миссий, но их можно достичь в полёте.
Для двигателя Pave Spike это означает, что при установке износа 100% его отклонение скорости σ дополнительно увеличится на 20%. Предполагая хорошее начальное состояние, двигатель в этот момент, вероятно, будет работать со скоростью от 45 до 75 градусов в секунду.

Опорный самолёт
Систему отклонения при первоначальном появлении можно отключить с помощью этого флажка, если это необходимо. Компоненты будут начинаться со своего среднего значения μ, без какого-либо отклонения.
То есть, если этот флажок установлен, настройка состояния, а также износа игнорируются и отключаются. Самолёт появится со всеми характеристиками, установленными точно так, как указано производителем и в соответствии с документацией, без какого-либо отклонения.
Это особенно интересно для соревнований, где обе стороны должны начинать с одинаковых условий для честности. Или при проведении испытаний и расчёте таблиц характеристик, где самолёт должен всегда начинаться с одних и тех же значений.
💡 Даже опорный самолёт всё ещё подвержен износу во время полёта. В соревнованиях, если вы создаёте большие перегрузки, характеристики компонентов вашего самолёта будут отличаться от характеристик самолёта вашего противника.
Сохранённое выравнивание INS
Этот флажок позволяет значительно сократить время, необходимое для правильного выравнивания INS во время холодного запуска.
Поэтому наземный персонал предварительно запустил бы самолёт и выполнил полное выравнивание, а затем снова выключил бы его, запомнив часть данных выравнивания.
Подробнее о том, как выполнить сохранённое выравнивание, см. в разделе «INS».
Разрешить очки ночного видения
Хотя экипажи F-4E никогда фактически не работали с очками ночного видения, эта опция позволяет дизайнерам миссий создавать современные или вымышленные сценарии, в которых экипажи Фантома могут иметь доступ к таким устройствам.
Опции TACAN
Позволяет установить канал и диапазон TACAN, установленные при первоначальном появлении.
Опции VOR/ILS
Позволяет установить частоту VOR/ILS при первоначальном появлении.
Ключ шифрования KY-28
Позволяет установить ключ шифрования, используемый системой шифрования связи KY-28.
Эта настройка особенно важна при использовании таких инструментов, как ED-VOIP или SRS, которые имитируют шифрование при использовании радиооборудования.
Подробнее см. систему KY-28.
Двойной сброс дипольных отражателей
Опция, доступная наземному персоналу на контейнерах средств противодействия AN/ALE-40.
Когда она выбрана, каждый сигнал на сброс дипольных отражателей вместо этого сбрасывает дипольные отражатели с обеих сторон одновременно.
Подробнее см. систему AN/ALE-40.
Опции режима 2 IFF
Позволяет предварительно выбрать код режима 2 для системы IFF.
Опции лазера
Позволяет предварительно выбрать код лазера для прицельного контейнера и оружия с лазерным наведением.
Опции радио
Редактор позволяет предварительно установить все 18 каналов COMM и 20 каналов AUX радиостанции UHF:
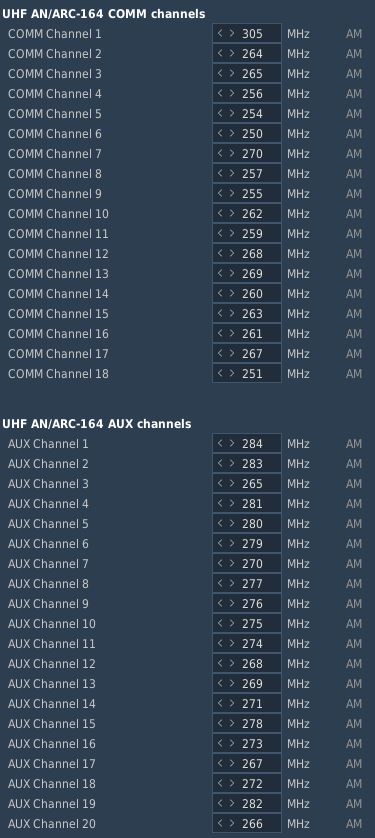
Можно настроить станцию в редакторе миссий для использования в навигации ADF. Для этого необходимо разместить на карте объект, например, наземную станцию. Затем этот объект должен выполнить команду настройки на желаемую AM-частоту (Выполнить команду > Установить частоту). Наконец, объект должен непрерывно передавать сообщение в течение всей миссии, что требует установки циклического воспроизведения сообщения (Выполнить команду > Передать сообщение).
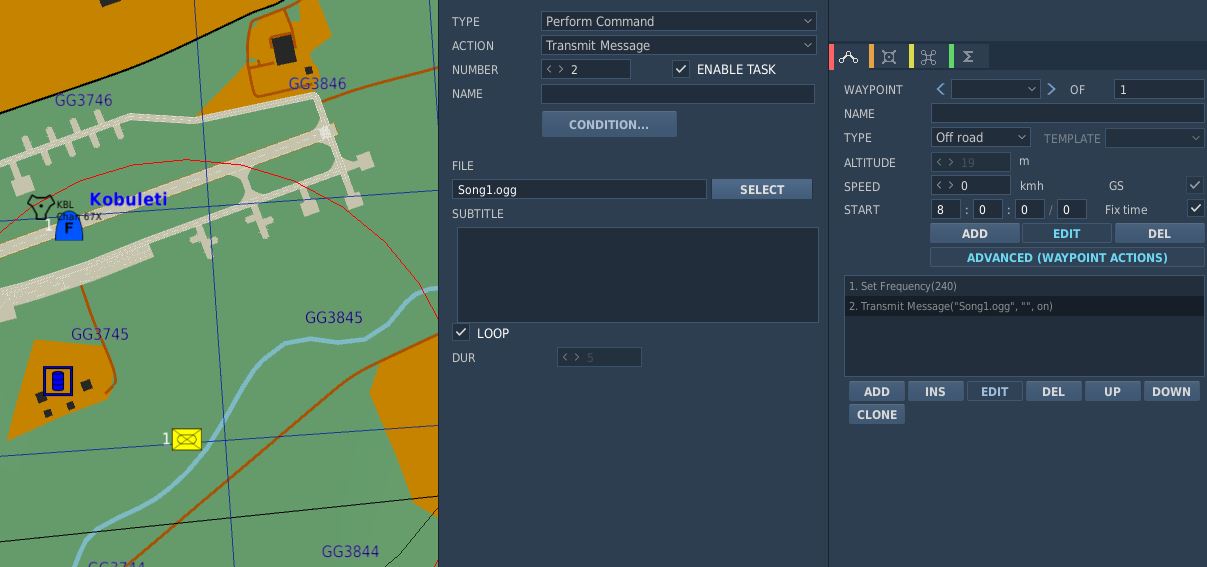
Также для триггеров миссии предусмотрены параметры радиочастоты для считывания текущих активных радиочастот UHF:
| Параметр | Описание |
|---|---|
COMM_FREQ | Частота Comm в МГц |
AUX_FREQ | Частота Aux в МГц |

Подготовка плана полёта
Путевые точки, установленные в редакторе миссий, будут автоматически загружены в основной план полёта Jester. Специальные типы путевых точек можно назначить, добавив определённые фразы, написанные заглавными буквами, в поле имени путевой точки. Распознаваемые фразы:
- VIP (навигационная точка)
- IP
- TGT (цель)
- F-IN (граница входа)
- F-OUT (граница выхода)
- HB (база)
- ALT (запасной)
- CAP
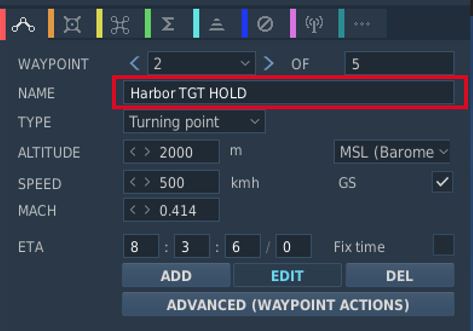
Подробнее о том, как эти типы путевых точек влияют на поведение Jester, см. в разделе 5.2. Навигация Jester.
SetCommands
F-4E имеет список команд SetCommand, которые могут использоваться создателями миссий. Все команды выполняются молча, то есть Jester не будет ни отклонять, ни подтверждать какие-либо команды. SetCommands с идентификатором команды, именем и значениями можно найти в таблице ниже:
| Идентификатор команды | Название | Значение |
|---|---|---|
| 20010 | Jester_silent | 0-1 |
| 20011 | Jester_pause | 0-1 |
| 20015 | Jester_tune_ARC_164_channel | 0.XX |
| 20016 | Jester_tune_TACAN_channel | s0.XXXY |
| 20017 | Jester_deviate_to_tgt_zone | 0.XX |
| 20018 | Jester_add_wpt_after | 0.TTXXY |
| 20020 | Jester_resume_flightplan | 0.XXY |
| 20021 | Jester_designate_wpt | 0.DXXY |
| 20022 | Jester_set_cap_time | 0.XX |
| 20023 | Jester_eject_WSO | 0-1 |
| 20025 | Jester_unlock_tgt | 0-1 |
| 20026 | Jester_radar_power | 0.00 - 1.00 с шагом 0,2 |
| 20027 | Jester_radar_polar | 0-1 |
| 20028 | Jester_radar_range | 0.00 - 1.00 с шагом 0,2 |
| 20029 | Jester_radar_maneuver | 0-1 |
| 20030 | Jester_radar_scan | 0-1 |
| 20031 | Jester_radar_aspect | 0.00 - 1.00 с шагом 0,2 |
| 20032 | Jester_radar_rcvr_fine | 0.00 - 1.00 |
| 20033 | Jester_radar_rcvr_coarse | 0.00 - 1.00 |
| 20034 | Jester_radar_track | 0.00 - 1.00 с шагом 0,33 |
| 20035 | Jester_radar_display | 0.00 - 1.00 с шагом 0,2 |
| 20036 | Jester_radar_man_vc | 0.00 - 1.00 с шагом 0,1 |
| 20037 | Jester_radar_pulse | 0-1 |
| 20038 | Jester_radar_mode | 0.00 - 1.00 с шагом 0,2 |
| 20039 | Jester_dispense | 0-1 |
| 20040 | Jester_air_to_air | 0-1 |
| 20041 | Jester_video_select | 0-1 |
| 20042 | Jester_context_short | 0-1 |
| 20043 | Jester_context_long | 0-1 |
| 20044 | Jester_context_double | 0-1 |
| 20045 | Jester_set_laser_code | 0.XXXX |
| 20046 | Jester_set_wrcs_drag | 0.XXX |
| 20047 | Jester_set_wrcs_alt_range | 0.XXX |
| 20048 | Jester_set_wrcs_ew_dist | s0.XXX |
| 20049 | Jester_set_wrcs_ns_dist | s0.XXX |
| 20050 | Jester_set_wrcs_advance | 0.XXX |
| 20051 | Jester_set_wrcs_range | 0.XXX |
Использование SetCommands
В этой главе будет объяснено использование различных SetCommands, которые имеют более сложные значения.
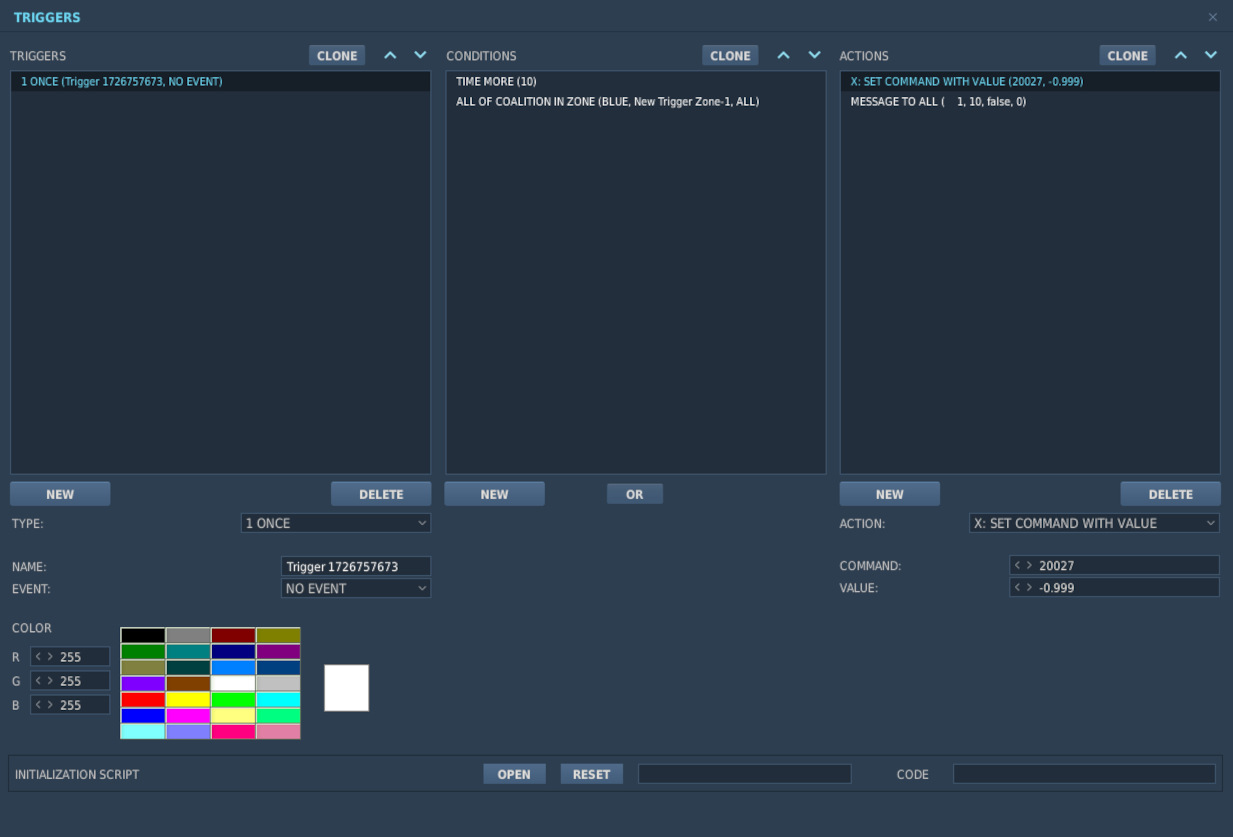
Jester_tune_ARC_164_channel
Значение имеет формат "0.XX", где "XX" - это двузначный номер канала.
Jester_tune_TACAN_channel
Значение имеет формат "s0.XXXY", где "s" - это необязательный знак минус. Используйте отрицательные значения для A/A (Воздух-воздух) и положительные для T/R (Передача/Приём). "XXX" представляет собой трёхзначный номер канала, при этом для каналов ниже 100 требуются ведущие нули. "Y" указывает режим: "0" для режима X и "1" для режима Y. Например, "0.0630" соответствует каналу 63X в режиме T/R, а "-0.0081" - каналу 8Y в режиме A/A.
Jester_deviate_to_tgt_zone
Значение имеет формат "0.XX", где "XX" - это номер зоны путевой точки. Обратите внимание, что зона триггера должна называться "WaypointZone". Например, "0.02" соответствует "WaypointZone02".
Jester_add_wpt_after
Значение имеет формат "0.TTXXY", где "TT" - это номер зоны путевой точки, "XX" - это номер путевой точки, а "Y" - это номер плана полёта.
Jester_resume_flightplan
Значение имеет формат "0.XXY", где "XX" - это номер путевой точки (например, "01" для путевой точки 1, "12" для путевой точки 12), а "Y" - это номер плана полёта (по умолчанию 1, если не указан). Примеры включают "0.05", который относится к поворотной точке 5 в плане полёта 1, и "0.102", который относится к поворотной точке 10 в плане полёта 2.
Jester_designate_wpt
Значение имеет формат "0.DXXY", где "D" - это обозначение путевой точки, "XX" - это номер путевой точки (например, "01" для путевой точки 1, "12" для путевой точки 12), а "Y" - это номер плана полёта (по умолчанию 1, если не указан). Обозначения путевых точек следующие:
- 0 -> По умолчанию
- 1 -> CAP
- 2 -> IP
- 3 -> Цель
- 4 -> VIP
- 5 -> Тихая VIP
- 6 -> Граница входа
- 7 -> Граница выхода
- 8 -> База
- 9 -> Запасной
Например, "0.005" указывает на поворотную точку 5 в плане полёта 1 с обозначением "По умолчанию", а "0.3102" - на поворотную точку 10 в плане полёта 2 с обозначением "Цель".
Jester_set_cap_time
Значение устанавливает время CAP для активной пары CAP в формате "0.XX", где "XX" представляет собой количество минут. Например, "0.05" соответствует 5 минутам, а "0.12" - 12 минутам.
Записи WRCS и код лазера
Записи WRCS используются от 0.999 до 0.000, где 0.999 - это наибольшее значение, которое может иметь WRCS. Для Jester_set_wrcs_ew_dist и Jester_set_wrcs_ns_dist s означает -. Когда вводится отрицательное значение, оно будет вводить значения запада или юга соответственно.
Код лазера можно установить, введя действительный код лазера для XXXX. Обратите внимание, что Jester не будет вводить недопустимые коды и не будет реагировать никак, кроме как не вводить код лазера.
Учебные миссии
Уроки
Эти миссии, которые мы называем «уроками», были разработаны таким образом, чтобы, будучи новичком, вы могли получить объяснение всего важного, что вам нужно для успешного начала работы с вашим новым F-4E Phantom II.
Цели
Заявленная цель этих уроков состоит в том, чтобы после их однократного или многократного прохождения вы могли сказать: «Эй, я думаю, что теперь я (снова) знаю, как эта штука работает». Вы можете использовать уроки в качестве «первоначального обучения» или так называемого «периодического обучения». Всякий раз, когда вы долго не летали и вам нужно освежить свои знания. Кстати: мы рекомендуем освежать свои знания не реже одного раза в 90 дней...
Обратите внимание, что уроки требуют определённого уровня знаний и базовых навыков пилотирования. В уроках мы не объясняем само пилотирование, а скорее самолёт, его системы и их использование, а также поведение. Поэтому уроки можно понимать как своего рода «интерактивное типовое обучение в кресле кабины», а не как «базовое обучение пилотированию».
Ваш путь
Из-за конструкции, систем и возраста самолёта у него есть много особенностей. Точное применение знаний о системах в повседневной работе на этом замечательном самолёте - ключ к успеху. С F-4E Phantom II вам придётся столкнуться со многими трудностями. Так что будьте готовы! Мы оставляем на ваше усмотрение, хотите ли вы сразу подняться в воздух, не изучая руководство, или хотите прочитать его перед первым полётом...
Решайте сами!
Если вы хотите лететь немедленно, учебные уроки дадут вам достаточно знаний, чтобы успешно выполнить эти полёты. Вы даже можете изучать этот раздел или другие части руководства во время своих полётов; это ещё одно новшество в DCS F-4E Phantom II. При необходимости уроки можно приостановить в любое время. Конечно, вы можете практиковаться в многозадачности и летать одновременно с изучением руководства; это не запрещено! Обучение на практике - это основная стратегия учебных уроков, но вам потребуется прочитать руководство и внимательно изучить системы, если вы хотите стать настоящим профессионалом.
Процедуры
Мы описали наиболее важные «нормальные процедуры» самолёта и очень сильно основывали уроки на реальности. Эти процедуры также должны быть максимально приближены к реальным процедурам, хотя мы осознавали, что реализовать всё в симуляции невозможно. Подумайте, например, о привязных ремнях катапультного кресла, кислородной маске и её проверке, ответчике, системе IFF или аналогичных системах. Некоторые шаги опущены, потому что они уже правильно установлены после появления самолёта, и чтобы действительно ускорить урок, чтобы вы могли подняться в воздух; конечно, вы можете проверить и их.
Поэтому не все процедуры описаны так, как это можно найти в реальных руководствах по эксплуатации самолёта; некоторые из них пришлось изменить, сократить или полностью опустить. Тем не менее, например, мы смоделировали надевание шлема (включая солнцезащитный козырёк и солнцезащитные очки), иммерсивное новшество в DCS.
Наш путь
Мы много думали о том, как лучше всего объяснить работу такого сложного самолёта с помощью учебных миссий. С чего начать, где закончить? Насколько подробным должно быть описание, чтобы «зануда» ничего не пропустил, насколько поверхностным оно может быть, чтобы «игроку-любителю» не стало скучно? Насколько строги проверки того, соблюдает ли игрок процедуры и запланированный маршрут полёта? Основная идея Heatblur всегда заключалась в том, чтобы как можно быстрее поднять игроков «в воздух», не заставляя их часами смотреть вступительные видеоролики или изучать толстые книги. Всё это доставляло нам много головной боли...
В любом случае, мы не пожалели ни средств, ни усилий, ни дискуссий, чтобы обслуживать оба типа игроков более или менее «одинаково». Как вы можете себе представить, такой проект не совсем тривиален, и при разработке уроков приходится идти на множество компромиссов. Иногда приходится говорить сторонникам жёсткой линии: «Эй, это может быть слишком сложно для игроков и не очень актуально для симуляции, хотя это было бы очень круто!» Вам приходится убеждать других членов команды делать то, что им лично не нравится: «Эй, это именно то, что нужно игрокам, но сделайте это немного по-другому, пожалуйста!»
К счастью, у нас была профессиональная помощь от экспертов (настоящих бывших пилотов Фантома и офицеров систем вооружения и даже инструкторов). Эти ребята помогли нам принять так много решений и обогатили продукт своими знаниями и опытом. И наоборот, они били нас по рукам, если мы упускали что-то, что, по их мнению, было важным.
В сложном процессе разработки, который требует такой высококачественный модуль DCS, есть много препятствий и ограничений, но также много возможностей и перспектив. Вот почему мы с самого начала стремились как можно полнее представить работу систем самолёта.
Надеемся, вам понравится то, что у вас сейчас в руках!
Обзор уроков
Этот раздел ограничен описанием первых 4 уроков:
- Урок 01 - Запуск
- Урок 02 - Руление
- Урок 03 - Нормальный взлёт
- Урок 04 - Визуальный заход на посадку
Общие советы и рекомендации
Редко случается, что вы застреваете в процедуре или не знаете, что делать дальше.
Вот несколько общих советов и рекомендаций, составленных тестерами во время фазы тестирования:
- Для уроков, начинающихся на земле, шум может быть очень громким. У вас есть три варианта:
- Подождите, пока другие самолёты взлетят, прежде чем начинать урок.
- Вам разрешено закрыть фонарь, когда вам нужно (привязка по умолчанию - LCTRL+C), несмотря на то, что F-4 обычно закрывает его очень поздно.
- Отрегулируйте громкость звука DCS в соответствии с используемым вами оборудованием.
- Если у вас проблемы с очень тёмной кабиной, можно сделать несколько вещей:
- Используйте внутреннее освещение кабины на панели COCKPIT LIGHTS (справа):
- Ручка CONSOLE OFF/BRT
- Ручка INSTR PANEL
- Переключатель CONSOLE FLOOD
- Переключатель INST FLOOD
- Используйте внутреннее освещение кабины на панели COCKPIT LIGHTS (справа):
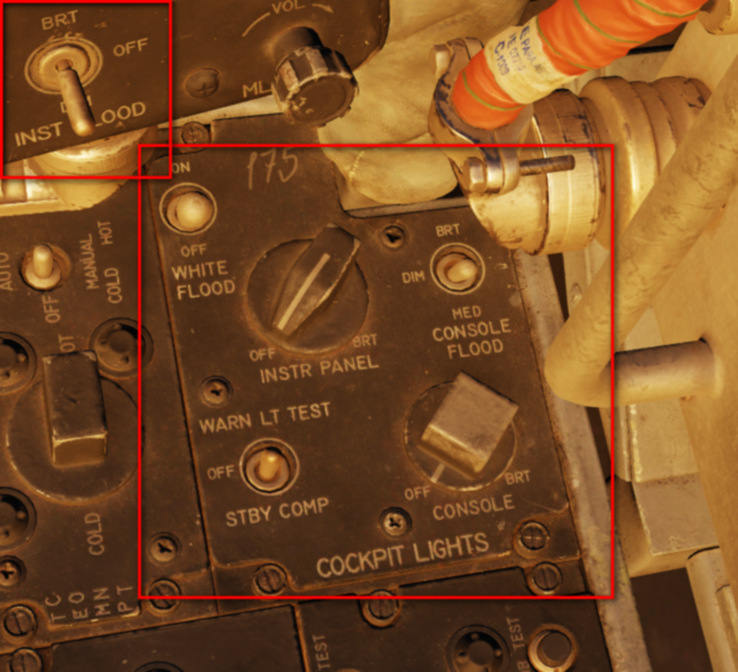
- Установите опцию SYSTEM «Cockpit Global Illumination» (Глобальное освещение кабины) в положение ON (ВКЛ).
- Установите опцию SYSTEM «Gamma» (Гамма) на 2,0 или выше.
Аварийные ситуации
Бывают ситуации, когда триггеры урока по какой-то неизвестной причине перестают работать должным образом. К счастью, это случается очень редко! Обычно это приводит к тому, что подсветка (жёлтые вспомогательные рамки) больше не отображается или не скрывается должным образом, или логические схемы больше не реагируют правильно на события в симуляции. Мы сами столкнулись с этим во время фазы тестирования и хотели бы хотя бы сейчас проинформировать вас об этом.
Влияние функции ускорения времени на стабильность уроков не документировано, но на всякий случай мы советуем не использовать функцию ускорения времени.
Если вы застряли в уроке, вам следует предпринять следующие действия:
-
Сохраняйте спокойствие! Применяются два самых важных правила пилота:
- Пилотирование, навигация, связь.
- Не разбивайтесь и, прежде всего, ничего не ломайте!
-
Проверьте, всё ли в самолёте настроено так, как требуется, в соответствии с контрольным списком/процедурой. При необходимости вернитесь на несколько шагов назад по списку и снова проверьте каждый шаг по отдельности, начиная сверху, задавая себе вопрос: Что написано в книге? > Как я это настроил?
-
Если это не помогло: Вернитесь на один или даже несколько шагов назад (как это сделать, объяснено выше).
-
Если это тоже не помогло: Вернитесь к началу процедуры (как это сделать, объяснено выше).
-
Если всё это не помогло:
- Выйдите из миссии и сохраните DEBRIEFING (файл журнала) и TRACK (файл trk) на экране разбора полётов.
- Если вы подозреваете ошибку, пожалуйста, откройте новый тикет на форуме DCS > Heatblur Simulations > раздел Phantom, используя эту ссылку: https://forum.dcs.world/forum/919-dcs-f-4-phantom/. Пожалуйста, добавьте как можно больше информации, чтобы помочь нам найти возможную проблему. Спасибо за вашу поддержку!
- В любом случае, мы рекомендуем перезапустить DCS и загрузить миссию заново. Извините за это!
Урок 01 - Запуск
Урок 01 - Аэродром Кобулети
Аэродром живописно расположен между горами на юге и Чёрным морем на западе. Вот фотография аэродрома, сделанная месяц назад с вертолёта, вид на юго-запад.

Всё обучение на F-4E Phantom II за этот год (программа на июль 1995 года) будет проходить в Кобулети. Выбор пал на аэродром в Кавказском регионе по понятным причинам, так как эта карта поставляется с DCS в стандартной комплектации. Обозначенные районы для обучения на юге Грузии (обозначенные как «Учебный район W» и «Учебный район E») предлагают достаточно большую площадку для обучения, включая сверхзвуковые полёты.
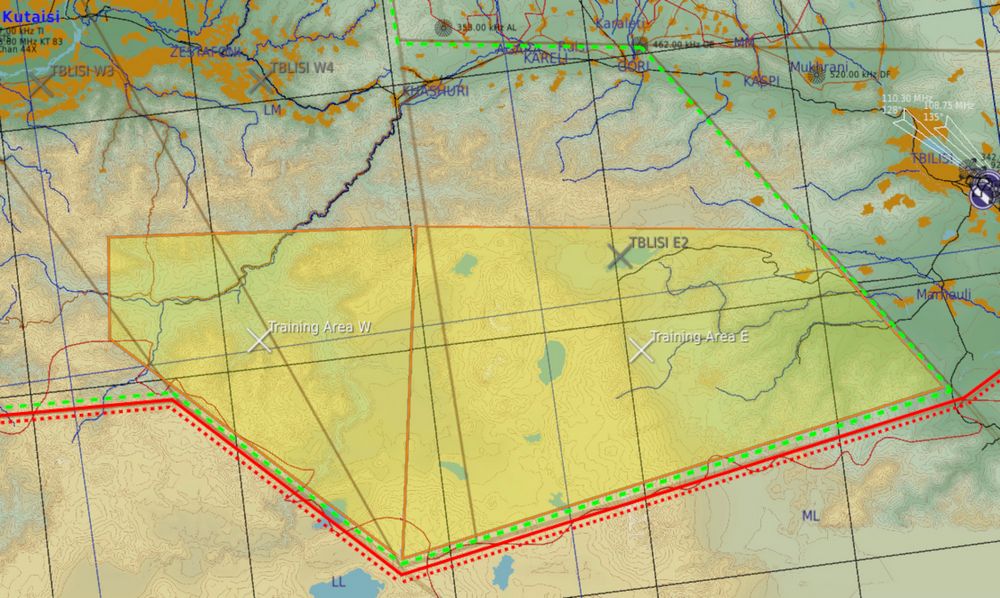
Урок 01 - Погода
Погода в последние несколько дней была очень плохой. Стойкий черноморский циклон принёс много дождя. Однако прошлой ночью и утром наступила стабилизация. Сухая воздушная масса поступает с востока. Ожидается, что средний слой облаков рассеется. Прогноз погоды предсказывает, что облака перестанут быть проблемой примерно через час, а температура быстро поднимется из-за сильного солнечного света. Однако всё ещё ожидается дымка на уровне земли, так как земля накопила много влаги, и ожидается сильное испарение от солнца.

Урок 01 - Слоты
Ваши коллеги-пилоты начнут свои полёты немедленно, ваш полёт немного позже. Аэродром - очень шумная среда, поэтому подождите, пока самолёты, в настоящее время находящиеся на взлётно-посадочной полосе, не взлетят, прежде чем начинать урок. Тогда уровень шума должен быть более-менее терпимым... по крайней мере, надеемся.
В настоящее время зарегистрированные вылеты на этот день:
- № 1 Dodge 41 (ИИ, уже в воздухе)
- № 2 Dodge 31 (ИИ, уже в воздухе)
- № 3 Dodge 21 и 22 (ИИ, на старте)
- № 4 Dodge 11 (вы, на стоянке № 25)
Все рейсы Dodge выполняют ознакомительные и учебные полёты на аэродроме.
Урок 01 - Самолёт
Ваш самолёт находится в состоянии «холодный и тёмный» на стоянке № 25, нос направлен в сторону взлётно-посадочной полосы, он подготовлен и полностью заправлен. Наземный источник питания Dash-60 уже установлен слева от вашего самолёта.

Техник, ответственный за самолёт, также называемый «начальником экипажа», уже находится перед вашим самолётом и ждёт, чтобы оказать вам поддержку. Вы можете общаться с ним, используя меню Jester > CREW CHIEF (НАЧАЛЬНИК ЭКИПАЖА).

Кстати, его помощник стоит слева от вас, рядом с наземным источником питания Dash-60.

Вы только что сели в катапультное кресло и начинаете осматривать кабину. Вы можете сказать себе: «Чёрт, я в шоке от всего, что вижу, но, похоже, я не знаю, что делать...».
Не волнуйтесь, ваш инструктор, который также является вашим WSO на сегодняшний полёт, проведёт вас через урок!
Урок 01 - Аудио и текст
Ваш инструктор говорит с заднего сиденья, всегда слушайте внимательно. Предполагайте, что всё, что он говорит, важно. В качестве помощи весь текст, который он произносит, отображается в правом верхнем углу экрана. Если вы что-то не заметили или не поняли, вы всегда можете прочитать это выше. Текст остаётся видимым на экране максимум 1000 секунд, пока не исчезнет или не будет заменён новым текстом.
Обратите внимание, что если вы пропустили одно из текстовых сообщений, вы можете получить доступ к журналу сообщений, нажав клавишу «Escape», а затем выбрав MESSAGES HISTORY (ИСТОРИЯ СООБЩЕНИЙ) и прочитать его позже.
Урок 01 - Задачи и шаги
Уроки разделены на задачи, которые основаны на названиях процедур. Эти задачи делятся на отдельные шаги, причём шаги идут рука об руку с отдельными пунктами процедуры. Задачи для этого урока:
- Задача 1: Проверьте самолёт и основные переключатели перед подачей внешнего питания.
- Задача 2: Выполните внутренний осмотр самолёта.
- Задача 3: Подготовьте самолёт к запуску двигателя.
- Задача 4: Запустите двигатели.
Вот несколько специальных советов для урока 01
- Задача 4: Дайте инструктору договорить каждую инструкцию до конца, времени на выполнение действий достаточно.
- Задача 4 > Шаг 4b: Будьте осторожны при открытии подачи топлива, это не следует делать до 10% оборотов двигателя! Если вы видите, что EGT поднимается выше 700°C, немедленно отключите подачу топлива, переместив рычаг РУД в положение «OFF». Примечание: параметры двигателя могут незначительно отличаться в зависимости от условий окружающей среды. Только значение EGT необходимо очень внимательно контролировать!
Урок 02 - Руление
Урок 02 - Погода
Погода меняется медленно, но заметно. Облака начинают рассеиваться, и прогноз относительно дымки на уровне земли был верен. Скорость и направление ветра пока не изменились.
Урок 02 - Слоты
Слоты не изменились.
- № 1 Dodge 41 (ИИ, уже на земле, заправка)
- № 2 Dodge 31 (ИИ, уже на земле, заправка)
- № 3 Dodge 21 и 22 (ИИ, на старте)
- № 4 Dodge 11 (вы, на стоянке № 25)
Все рейсы Dodge выполняют ознакомительные и учебные полёты на аэродроме.
Урок 02 - Самолёт
Ваш самолёт уже «горячий» на стоянке № 25, оба двигателя работают, нос направлен в сторону взлётно-посадочной полосы. Все системы самолёта установлены в те положения, в которых вы их оставили на предыдущем уроке. Наземный источник питания Dash-60 уже отключён.

«Начальник экипажа» переместился вправо перед вашим самолётом и ждёт, чтобы оказать вам поддержку.

Его помощник стоит слева от вас.

Урок 02 - Аудио и текст
Ваш инструктор говорит с заднего сиденья, всегда слушайте внимательно. Предполагайте, что всё, что он говорит, важно. В качестве помощи весь текст, который он произносит, отображается в правом верхнем углу экрана. Если вы что-то не заметили или не поняли, вы всегда можете прочитать это выше. Текст остаётся видимым на экране максимум 1000 секунд, пока не исчезнет или не будет заменён новым текстом.
Обратите внимание, что если вы пропустили одно из текстовых сообщений, вы можете получить доступ к журналу сообщений, нажав клавишу «Escape», а затем выбрав MESSAGES HISTORY (ИСТОРИЯ СООБЩЕНИЙ) и прочитать его позже.
Урок 02 - Задачи и шаги
Уроки разделены на задачи, которые основаны на названиях процедур. Эти задачи делятся на отдельные шаги, причём шаги идут рука об руку с отдельными пунктами процедуры. Задачи для этого урока:
-
Задача 1: Проверьте самолёт перед движением своим ходом.
-
Задача 2: Руление к точке ожидания ВПП 07.
Урок 02 - Советы и рекомендации
Вот несколько специальных советов для урока 02:
-
Задача 1 > Шаг 7: Проверку органов управления полётом можно пропустить, если она становится слишком сложной. Используйте кнопку FIRE TEST BUTTON на панели приборов до или во время выполнения этой проверки, чтобы пропустить её. Причина этого заключается в том, что для этой проверки необходимо выполнить несколько действий параллельно:
- Слушать нашего инструктора.
- Выполнять действия на системе управления полётом (движения и нажатия кнопок/переключателей/настройки).
- Слушать подтверждение, данное начальником экипажа.
- Нажимать «Пробел» после получения подтверждения от начальника экипажа.
-
Задача 1 > Шаг 7f и 7h: Начальник экипажа не ответит, когда вы установите руль направления в нейтральное положение.
-
Задача 2 > Введение: Обратите внимание, что звук, содержащий разрешение на руление от ATC, воспроизводится через вашу радиостанцию UHF. Поэтому, если вы выключите или уменьшите громкость радиостанции или направите звуковой сигнал на другое звуковое устройство с уменьшенной громкостью, вы можете не услышать вызов правильно. В любом случае, произнесённый текст можно прочитать в правом верхнем углу экрана, и урок продолжится нормально.
-
Задача 2 > Шаг 1a): Очень осторожно используйте рычаги управления двигателем! Как только самолёт начнёт движение, оттяните рычаги управления двигателем на холостой ход и осторожно контролируйте скорость руления, используя минимальную мощность вместе с колёсными тормозами.
Урок 03 - Нормальный взлёт
Урок 03 - Погода

Погода заметно меняется с каждой минутой. Облака продолжают рассеиваться, а дымка на уровне земли всё ещё присутствует. Скорость и направление ветра пока не изменились.
Урок 03 - Слоты
Слоты не изменились.
- № 1 Dodge 41 (ИИ, уже на земле)
- № 2 Dodge 31 (ИИ, уже на земле)
- № 3 Dodge 21 и 22 (ИИ, уже на земле)
- № 4 Dodge 11 (вы, в точке ожидания для взлётно-посадочной полосы 07)
Все рейсы Dodge выполняют ознакомительные и учебные полёты на аэродроме.
Урок 03 - Самолёт

Ваш самолёт уже «горячий» в точке ожидания для взлётно-посадочной полосы 07, оба двигателя работают, нос направлен в сторону взлётно-посадочной полосы. Все системы самолёта установлены в те положения, в которых вы их оставили на предыдущем уроке.
Урок 03 - Аудио и текст
Ваш инструктор говорит с заднего сиденья, всегда слушайте внимательно. Предполагайте, что всё, что он говорит, важно. В качестве помощи весь текст, который он произносит, отображается в правом верхнем углу экрана. Если вы что-то не заметили или не поняли, вы всегда можете прочитать это выше. Текст остаётся видимым на экране максимум 1000 секунд, пока не исчезнет или не будет заменён новым текстом.
Обратите внимание, что если вы пропустили одно из текстовых сообщений, вы можете получить доступ к журналу сообщений, нажав клавишу «Escape», а затем выбрав MESSAGES HISTORY (ИСТОРИЯ СООБЩЕНИЙ) и прочитать его позже.
Урок 03 - Задачи и шаги
Уроки разделены на задачи, которые основаны на названиях процедур. Эти задачи делятся на отдельные шаги, причём шаги идут рука об руку с отдельными пунктами процедуры. Задачи для этого урока:
- Задача 1: Проверьте самолёт, находясь в точке ожидания для ВПП 07.
- Задача 2: Выровняйте самолёт на ВПП 07.
- Задача 3: Проверьте основные системы самолёта, находясь на ВПП 07.
- Задача 4: Выполните нормальный взлёт (предкрылки и закрылки «выпущены») на ВПП 07.
- Задача 5: Выполните нормальный набор высоты на скорости 350 узлов или M0,9 (в зависимости от того, что будет достигнуто первым), следуя поворотным точкам 1, 2 и 3.
- Задача 6: Выполните проверки в крейсерском полёте.
Урок 03 - Советы и рекомендации
Вот несколько специальных советов для урока 03:
-
Задача 1 > Шаги 4a - 4e: Проверка органов управления полётом требует только проверки того, свободно ли движется ручка управления (необходимо выполнить не менее 50% отклонения ручки управления). Вы также можете проверить руль направления, но это не требуется на этом шаге.
-
Задача 1 > Шаг 10: Если сигнал MASTER CAUTION активен, это означает, что что-то не так или, по крайней мере, было не так. Поэтому сбросьте его, а затем проверьте, останется ли он выключенным.
-
Задача 2 > Шаг 1: Обратите внимание, что звук, содержащий разрешение на выравнивание от ATC, воспроизводится через вашу радиостанцию UHF. Поэтому, если вы выключите или уменьшите громкость радиостанции или направите звуковые сигналы на другое звуковое устройство с уменьшенной громкостью, вы можете не услышать вызов правильно. В любом случае, произнесённый текст можно прочитать в правом верхнем углу экрана, и урок продолжится.
-
Задача 4 > Введение Обратите внимание, что звук, содержащий разрешение на взлёт от ATC, воспроизводится через вашу радиостанцию UHF. Поэтому, если вы выключите или уменьшите громкость радиостанции или направите звуковые сигналы на другое звуковое устройство с уменьшенной громкостью, вы можете не услышать вызов правильно. В любом случае, произнесённый текст можно прочитать в правом верхнем углу экрана, и урок продолжится.
-
Задача 4 > Шаг 5: Для начинающих мы рекомендуем выполнить первый взлёт без форсажа (только на тяге MIL, что означает 100% оборотов двигателя без форсажа), несмотря на то, что мы знаем, что взлёт с форсажем доставляет массу удовольствия. Причина этого заключается в том, что вы сможете услышать все вызовы вашего инструктора, потому что время, необходимое для взлёта, достаточно велико. Когда вы будете уверены, что знаете наизусть все шаги, необходимые для безопасного взлёта без каких-либо инструкций, попробуйте взлететь с форсажем. Пожалуйста, не говорите нашим экспертам, что этот текст вообще существует, и никогда никому не говорите, что вы следовали рекомендации...
-
Взлёт: Перед взлётом просмотрите процедуру взлёта. Вам нужно запомнить пункты наизусть:
- Нет NGS после 70 узлов.
- Полностью отвести РУС назад к 80 узлам.
- Удерживать 10-12° НОСОМ ВВЕРХ.
- Убрать ШАССИ и ЗАКРЫЛКИ, как только самолёт оторвётся от земли.
- ТРИММИРОВАТЬ по мере необходимости.
-
Задача 4 > Шаг 8: В DCS, с текущей ветровой обстановкой (без боковой составляющей ветра), действительно нет необходимости использовать управление носовой стойкой шасси. Инструктор напомнит вам только в том случае, если вы будете использовать управление носовой стойкой шасси на скорости выше 70 узлов.
-
Задача 4 > Шаг 11: Триммирование тангажа лучше всего выполнять несколькими короткими нажатиями, а не одним длинным нажатием, чтобы избежать чрезмерного триммирования.
-
Задача 4 > Шаг 13: Убедитесь, что закрылки убраны до достижения скорости 250 узлов, но есть определённый запас прочности, и они не должны быть повреждены точно на 250 узлах.
-
Задача 5 > Шаг 1: Убедитесь, что вы летите курсом около 064° и набираете высоту после отрыва. Убедитесь, что вы летите на скорости не более 350 узлов. Выполните плавный набор высоты при использовании тяги без форсажа (угол тангажа около 10°). Выполните крутой набор высоты при использовании форсажа (угол тангажа около 30°).
-
После достижения определённой высоты и воздушной скорости с убранным шасси и закрылками урок завершён. Вы можете продолжить набор высоты, следуя маршруту, который вам укажет ваш инструктор. Если вы «заблудились в пространстве», откройте карту F-10, щёлкните по своему самолёту и посмотрите запланированный маршрут полёта; тогда вам будет легче следовать ему.
-
Задача 6 > Шаг 1d: В настоящее время нет возможности сравнить значения на обоих высотомерах. Этот шаг был сохранён в процедуре на случай, если он вам понадобится при работе с реальным WSO в заднем сиденье.
Урок 04 - Визуальный заход на посадку
Урок 04 - Погода
Погода стала довольно хорошей. Облака более или менее исчезли, а дымка на уровне земли менее заметна из-за быстрого повышения температуры. Скорость и направление ветра пока не изменились.

Урок 04 - Слоты
Слоты не изменились.
- № 1 Dodge 41 (ИИ, уже на земле)
- № 2 Dodge 31 (ИИ, уже на земле)
- № 3 Dodge 21 и 22 (ИИ, уже на земле)
- № 4 Dodge 11 (вы, в полёте, приближаетесь к поворотной точке 7)
Все рейсы Dodge выполняют ознакомительные и учебные полёты на аэродроме.
Урок 04 - Самолёт
Ваш самолёт уже «в полёте», приближается к поворотной точке 7 на высоте 22 000 футов на скорости 0,7 Маха. Все системы настроены так, как они были бы после типичной тренировки «воздух-воздух», поэтому потребуется подготовить самолёт к предстоящему заходу на посадку и посадке.

Урок 04 - Аудио и текст
Ваш инструктор говорит с заднего сиденья, всегда слушайте внимательно. Предполагайте, что всё, что он говорит, важно. В качестве помощи весь текст, который он произносит, отображается в правом верхнем углу экрана. Если вы что-то не заметили или не поняли, вы всегда можете прочитать это выше. Текст остаётся видимым на экране максимум 1000 секунд, пока не исчезнет или не будет заменён новым текстом.
Обратите внимание, что если вы пропустили одно из текстовых сообщений, вы можете получить доступ к журналу сообщений, нажав клавишу «Escape», а затем выбрав MESSAGES HISTORY (ИСТОРИЯ СООБЩЕНИЙ) и прочитать его позже.
Урок 04 - Задачи и шаги
Уроки разделены на задачи, которые основаны на названиях процедур. Эти задачи делятся на отдельные шаги, причём шаги идут рука об руку с отдельными пунктами процедуры.
Задачи для этого урока:
- Задача 1: Проверьте самолёт перед посадкой во время крейсерского полёта.
- Задача 2: Подготовьте самолёт к посадке, находясь на попутном курсе ВПП 07.
- Задача 3: Посадите самолёт на ВПП 07.
- Задача 4: Обезопасьте самолёт во время руления обратно на стоянку PRK 25.
Урок 04 - Советы и рекомендации
Вот несколько специальных советов для урока 04:
- Триммируйте самолёт: Триммирование тангажа лучше всего выполнять несколькими короткими нажатиями, а не одним длинным нажатием, чтобы избежать чрезмерного триммирования.
- Автопилот: Используйте режимы автопилота «удержание ориентации» и «удержание высоты», когда вам нужно освободить руки. Система - отличный помощник, так что используйте её!
- Расстояния DME: Информация о расстоянии DME отображается в левом нижнем углу HSI.
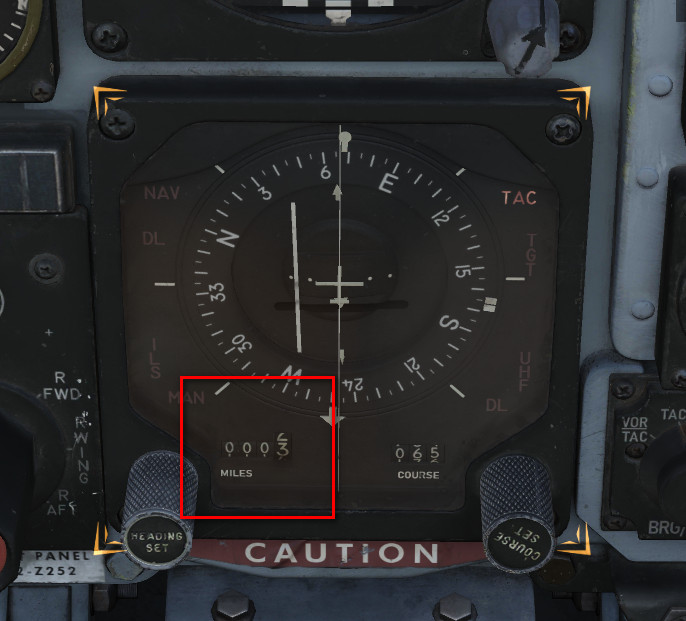
- Настройки курса HSI: Настройку курса можно изменить с помощью ручки COURSE SET KNOB в правом нижнем углу HSI:
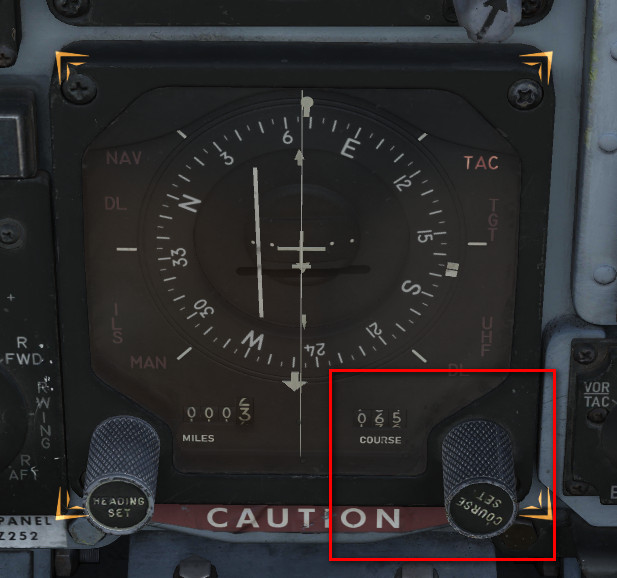
- Задача 1 > Шаг 4: Если вы не можете дотянуться до переключателя выбора антенны связи, на мгновение оттяните РУДы назад.
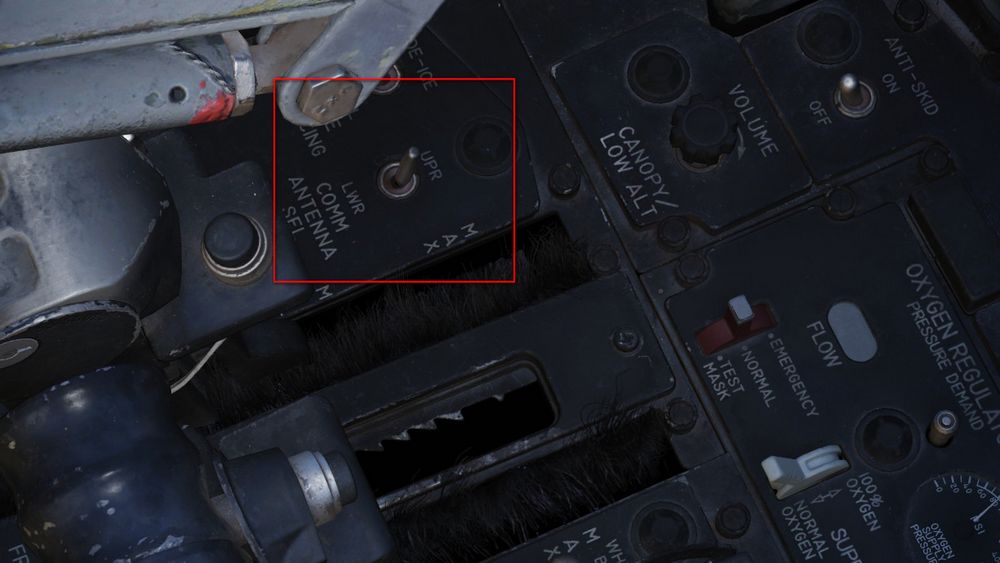
- Задача 1 > Шаг 8: Переходная высота в этом конкретном регионе составляет 4000 м (13 120 футов), а переходный эшелон - эшелон полёта 140 (FL140, что составляет 14 000 футов). Когда вы снижаетесь через 14 000 футов, вам нужно установить высотомер на значение местного QNH (который сегодня составляет 29,84 дюйма рт. ст.). Ничего страшного, если вы забудете об этом, это не повлияет на результат урока.
- ПРОБИВАНИЕ ОБЛАЧНОСТИ/СНИЖЕНИЕ: Следуйте инструкциям как можно точнее. Вы можете включить автопилот удержания ориентации во время снижения и сосредоточиться на управлении воздушной скоростью и тягой. Не забудьте установить QNH после прохождения переходного эшелона (в данном случае 14 000 футов).
- ПРОБИВАНИЕ ОБЛАЧНОСТИ/ПОВОРОТ: Выполните плавный левый поворот. Если вы уже достигли высоты 2500 футов, хорошо. Если вы всё ещё выше, продолжайте снижаться во время левого поворота, пока не достигнете 2500 футов. Следите за своей вертикальной скоростью. Летите плавно и не работайте слишком сильно ручкой управления. Перехватите радиал 064 как можно точнее, чтобы выровняться по курсу взлётно-посадочной полосы. Обращайтесь с ней как с леди и думайте наперёд! Используйте карту F-10, если вы заблудились в пространстве. Не спешите входить в воздушное пространство Батуми. Разрешение на посадку уже получено. Вы последний рейс, приближающийся к аэродрому в течение следующих двух часов.
- Задача 2: Запомните эти пять пунктов наизусть: ШАССИ/ЗАКРЫЛКИ/ДАВЛЕНИЕ ГИДРАВЛИКИ/СИГНАЛЬНЫЕ ЛАМПЫ/ПРОТИВОСКОЛЬЗЯЩАЯ СИСТЕМА.
- Задача 3: Если вы летите на правильной скорости, все инструкции можно услышать до конца. Если вы торопитесь, временная шкала сжимается, и последовательность событий может стать ошеломляющей. Во время захода на посадку постоянно сверяйте тангаж/тягу/триммер. Следите за взлётно-посадочной полосой, при необходимости корректируйте курс небольшими манёврами крена. Поднимите сиденье, если у вас возникли проблемы с видимостью взлётно-посадочной полосы на больших углах атаки. Летите плавно, следуйте инструкциям и думайте наперёд!
- Уход на второй круг: В случае малейшего сомнения в том, что вы не сможете выполнить безопасную посадку: УХОД НА ВТОРОЙ КРУГ. Выполните процедуру прерванного захода на посадку, войдя в короткую левую схему движения на высоте 1500 футов на скорости 250 узлов. Не торопитесь, будьте терпеливы к себе, не спешите и следите за воздушной скоростью и высотой!
- Посадка/выравнивание: Самолёт был сертифицирован для посадки на авианосец. Если вы не выровняете самолёт перед касанием на глиссаде 2°-3°, вы врежете самолёт во взлётно-посадочную полосу. Это приводит к износу колёс и стоек шасси, но не более того. Вы можете сами решить, хотите ли вы немного выровнять самолёт, чтобы немного уменьшить вертикальную скорость. Однако вертикальные скорости выше 3-4 м/с (600-700 футов в минуту) в зависимости от веса могут повредить шасси.
- Посадка/касание: Убедитесь, что вы остаётесь на центральной линии, используя только руль направления. Подготовьтесь к выпуску тормозного парашюта, который стабилизирует самолёт во время пробега. Дорулите до конца взлётно-посадочной полосы, а затем сверните с неё на правую сторону!
- Руление: Следуйте за диспетчером после того, как покинете взлётно-посадочную полосу. Если у вас возникнут трудности с выполнением «процедуры после посадки» во время руления, вы можете остановить самолёт на рулёжной дорожке для этого. Однако машина не остановится. Когда вы закончите процедуру, продолжайте руление к своей первоначальной стоянке, носом, направленным к укрытию «25», и остановитесь там.
Моддинг
Фантом поощряет моддинг и позволяет сообществу изменять различные части симуляции и игрового процесса.
Игроки могут наслаждаться своими творениями как в одиночной игре, так и в многопользовательской игре на серверах, которые отключили проверку целостности файлов.
💡 Дайте нам знать, если вы создадите классный мод, который, по вашему мнению, должен войти в модуль!
Jester
Jester полностью открыт для моддинга. Подробнее см. Jester API.
Руководство
Это руководство имеет открытый исходный код на GitHub.
Если вы нашли опечатку или хотите улучшить раздел, пожалуйста, дайте нам знать или не стесняйтесь вносить свой вклад непосредственно на GitHub.
Интегрированные веб-сайты
Некоторые функции самолёта используют интегрированные веб-сайты, которые отображаются в игре со встроенным веб-браузером.
Код веб-сайтов можно найти в папке Mod, например:
G:\DCS World OpenBeta\Mods\aircraft\F-4E\UI
Браузер поддерживает полный HTML/CSS/JS и даже позволяет загружать внешние сайты, например, посещать YouTube и смотреть некоторые обучающие видео.
Не стесняйтесь улучшать любой из существующих сайтов, например, колесо Jester или интерфейс жирного карандаша, если хотите.
Explain-Me
Чтобы быстро узнать, что делает переключатель, встроенное руководство позволяет удерживать горячую клавишу (M по умолчанию), затем щёлкнуть по любому переключателю в кабине, и руководство откроется, прокрутившись прямо к месту, объясняющему соответствующий переключатель.
С технической стороны эта функция настроена в таблице поиска, расположенной в папке Mod, например:
G:\DCS World OpenBeta\Mods\aircraft\F-4E\Input\explain_table.csv
Этот файл связывает имена указателей/разъёмов модели с относительными URL-адресами руководства.
# in explain_table.csv
PNT_Pull_Up_Light;cockpit.html#pull_up_system
PNT_FIRE_TEST_BUTTON;cockpit.html#fire_test_button
PNT_Marker_Beacon;cockpit.html#marker_beacon
PNT_VOR_Light;cockpit.html#vor_light
URL-адрес, например, cockpit.html#fire_test_button, затем загружается в браузер руководства.
Jester
Jester полностью открыт для моддинга через Lua-API. Любая функция и функциональность Jester была написана с использованием этого API.

ИИ Jester в основном состоит из:
- логики - написанной с помощью Lua-API
- пользовательского интерфейса - встроенных веб-сайтов для колеса и диалогов
- звуков - см. Голосовые файлы
💡 Дайте нам знать, если вы создадите классный мод Jester, который, по вашему мнению, должен войти в модуль!
Голосовые файлы
Всю библиотеку фраз Jester можно найти в папке Mod, например:
G:\DCS World OpenBeta\Mods\aircraft\F-4E\Sounds\Jester
При редактировании звуков необходимо перезапустить DCS. Просто перезагрузки миссии недостаточно для того, чтобы изменения вступили в силу.
sdef
Чтобы DCS понимал файлы, файлы определения звука (sdef) находятся в:
G:\DCS World OpenBeta\Mods\aircraft\F-4E\Sounds\sdef\Jester
Файл sdef - это простой текстовый файл, который можно редактировать в любом текстовом редакторе. Помимо указания местоположения фактического звукового файла, он может определять такие свойства, как усиление или эффекты затухания/нарастания, а также позиционировать звуковой эффект в мире при воспроизведении.
wave = "Jester/Contacts/theresafriend4shipbraHI1"
inner_radius = 10
outer_radius = 100
position = {0.0, 0.0, 0.0}
gain = 2
streaming = false
preload = false
Вариации
При размещении нескольких звуковых файлов с одинаковым именем, с суффиксом в виде увеличивающегося числа, DCS будет автоматически воспроизводить любой из файлов случайным образом.
Таким образом, можно создавать вариации, чтобы не воспроизводить один и тот же звук постоянно.
Настроение
Звуки Jester могут иметь суффикс HI, чтобы указать варианты, которые должны воспроизводиться только тогда, когда Jester находится в напряжённом настроении. Файлы HI могут, например, заставить Jester кричать, а не говорить спокойно.
Lua API
Здесь приводится краткий обзор Lua, на котором в основном написан Jester, и объясняется сам Jester API.
Начало работы с Lua
Полезные ссылки:
- Документация по Lua: https://www.lua.org/docs.html
Таблицы
Lua сам по себе является довольно простым языком с не слишком большим количеством функций. Он в основном вращается вокруг использования таблиц. Таблицы можно сравнить с массивами, списками и словарями или картами.
-- словарь
local person = {
name = "John",
age = 20,
}
-- массив/список
local fruits = { "Orange", "Apple", "Lemon" }
Массивы также неявно преобразуются в словари с возрастающими ключами 1, 2 и т.д.
Доступ может быть либо в стиле поиска person["age"] = 21, либо как к полям person.age = 21.
В Lua индексы начинаются с 1:
print(fruits[1]) -- Orange
К длине таблицы можно получить доступ с помощью #:
-- appending to a table
fruits[#fruits + 1] = "Cherry"
Всё, что явно не установлено, получает значение nil.
Пример синтаксиса
function ageCheck(name, age)
if age < 18 then
print("Sorry", name)
else
print("Okay", name)
end
end
Классы Lua сам по себе не предоставляет классы. Однако мы создали фреймворк для добавления классоподобных структур в Lua:
local Class = require('base.Class')
local Person = Class()
Person.name = nil -- fields
Person.age = nil
function Person:Constructor(name, age)
self.name = name
self.age = age
end
Person:Seal() -- Запретить добавление/удаление дополнительных значений/функций
Фреймворк также поддерживает наследование:
local Class = require('base.Class')
local Behavior = require('base.Behavior')
local AssistAAR = Class(Behavior) -- inherits from Behavior
Отладка
К сожалению, у нас нет настроенного отладчика Lua. Приходится полагаться на отладку с помощью вывода:
print("hello world")
print("Person:", person)
print("Check:", foo, bar, baz)
Который затем можно увидеть в консоли. Обратите внимание, что для того, чтобы увидеть вывод, может потребоваться периодически вызывать io.flush().
Мы также предоставляем игровую площадку Lua в WizardJester.lua, которая всегда выполняется непосредственно при запуске.
Также можно редактировать файлы Lua во время работы DCS, без перезапуска игры. Просто отредактируйте файл LUA, а затем перезагрузите миссию DCS с помощью CTRL+R, и новый файл Lua вступит в силу.
Jester API
Логика Jester разделена на 6 уровней абстракции:
- Намерение (WIP)
- План (WIP)
- Ситуация
- Поведение
- Задача
- Действие
Код размещается в папке Mod, например:
G:\DCS World OpenBeta\Mods\aircraft\F-4E\Jester
Пример
В качестве примера, затрагивающего большинство уровней, мы хотим создать функцию, которая позволит Jester сообщать текущую скорость каждые несколько секунд во время полёта.
Поэтому мы начнём с ситуации. Ситуации необходимо условие активации и деактивации:
-- Airborne.lua
local Class = require 'base.Class'
local Condition = require 'base.Condition'
local Airborne = {}
Airborne.True = Class(Condition)
Airborne.False = Class(Condition)
function IsAirborne()
-- details on observations later
return GetJester().awareness:GetObservation("airborne") or false
end
function Airborne.True:Check()
return IsAirborne() -- activation condition
end
function Airborne.False:Check()
return not IsAirborne() -- deactivation condition
end
Airborne.True:Seal()
Airborne.False:Seal()
return Airborne
Условия активации и деактивации не обязательно должны быть одинаковыми.
Теперь мы можем использовать это условие в нашей ситуации Flight и добавить желаемое поведение:
-- Flight.lua
local Class = require 'base.Class'
local Situation = require 'base.Situation'
local Airborne = require 'conditions.Airborne'
local ReportSpeed = require 'behaviors.ReportSpeed'
-- поведение будет определено на следующем шаге
local Flight = Class(Situation)
-- it simply expects a class with a :Check() method
Flight:AddActivationConditions(Airborne.True:new())
Flight:AddDeactivationConditions(Airborne.False:new())
function Flight:OnActivation()
self:AddBehavior(ReportSpeed) -- запустить наше поведение
end
function Flight:OnDeactivation()
self:RemoveBehavior(ReportSpeed) -- остановить наше поведение
end
Flight:Seal()
return Flight
Ситуацию также необходимо зарегистрировать в F-4E_WSO.lua (WIP):
-- in F-4E_WSO.lua
...
function CreateF4E_WSOJester()
...
wso::AddSituations(Flight:new())
...
end
Теперь мы можем определить наше поведение:
-- ReportSpeed.lua
local Class = require('base.Class')
local Behavior = require('base.Behavior')
local SaySpeed = require('tasks.common.SaySpeed')
-- Задача будет определена на следующем шаге
local ReportSpeed = Class(Behavior)
function ReportSpeed:Constructor()
Behavior.Constructor(self)
end
function ReportSpeed:Tick()
-- это вызывается периодически
local task = SaySpeed:new(...) -- доступ к скорости будет объяснён позже
GetJester():AddTask(task)
end
ReportSpeed:Seal()
return ReportSpeed
Теперь это заставит Jester говорить что-то на каждом тике, немного слишком многословно. Чтобы улучшить это, была создана система Urge. Мы можем обернуть нашу задачу в Urge, и она будет вызываться только через заданный интервал (который автоматически применяется с некоторым отклонением в зависимости от фиксации и уровня стресса Jester):
-- ReportSpeed.lua
local Class = require('base.Class')
local Behavior = require('base.Behavior')
local Urge = require('base.Urge') -- добавлено
local StressReaction = require('base.StressReaction') -- добавлено
local SaySpeed = require('tasks.common.SaySpeed')
local ReportSpeed = Class(Behavior)
function ReportSpeed:Constructor()
Behavior.Constructor(self)
-- логика поведения
local say_speed = function ()
-- очень просто в этом случае,
-- но также может запускать несколько задач в зависимости от условий, если это необходимо
local task = SaySpeed:new(...)
GetJester():AddTask(task)
return {task}
end
-- определить побуждение
self.urge = Urge:new({
time_to_release = s(10), -- базовый интервал (сейчас 10 секунд)
on_release_function = say_speed, -- что выполнять
stress_reaction = StressReaction.ignorance, -- насколько это важно для Jester
})
self.urge:Restart() -- запустить его
end
function ReportSpeed:Tick()
-- мы также можем изменить побуждение сейчас, если это необходимо
-- например, увеличить уровень стресса
self.urge:Tick() -- выполнить его
end
ReportSpeed:Seal()
return ReportSpeed
Следующий шаг - создать фактическую задачу, которая будет отвечать за сообщение заданной скорости:
-- SaySpeed.lua
local Class = require('base.Class')
local Task = require('base.Task')
local SayAction = require('actions.SayAction')
local SaySpeed = Class(Task)
function SaySpeed:Constructor(speed)
Task.Constructor(self)
local on_activation = function()
if speed < kt(500) then
-- см. PhrasesList.txt для всех поддерживаемых голосовых реплик
self:AddAction(SayAction('awareness/wereslow'))
else
self:AddAction(SayAction('awareness/werefast'))
end
end
self:AddOnActivationCallback(on_activation)
end
SaySpeed:Seal()
return SaySpeed
Последняя часть - это финальное действие, в нашем случае SayAction. Действия обычно очень общие и базовые. В большинстве случаев существующего SayAction будет достаточно. Обратитесь к SayAction.lua чтобы узнать, как он работает.
Если поведение не нуждается в специальной задаче и просто хочет произнести фразу, можно также напрямую использовать SayTask:
-- в логике поведения
...
local task = SayTask:new('misc/outoffuel')
GetJester():AddTask(task)
...
LReal и единицы измерения
Очень часто возникает необходимость работать с реальными значениями и единицами измерения, такими как скорость или время. Для этого у нас есть LReal с единицами измерения, определёнными в LUnit.
local time = min(15)
local speed = kt(500)
local fuel = lb(12000)
if time > s(10) then
print("foo")
end
time = time - s(40)
Будьте осторожны при выполнении скалярных операций:
-- правильно
time *= 2
-- неправильно
time *= s(2)
Последнее приведёт к недопустимому LReal, который можно проверить с помощью
time:IsValid().
При необходимости значения можно преобразовать в другую единицу измерения:
local timeInSeconds = time:ConvertTo(s)
print("Time:", timeInSeconds)
time.value будет получать доступ к необработанному базовому числу.
Доступ к свойствам
Lua имеет полный доступ ко всем Property определённым в наших компонентах, и может легко получать к ним доступ с помощью GetProperty:
function GetTotalFuelQuantity()
local gauge_readout = GetProperty(
"/Pilot Fuel Quantity Indicator/Fuel Meter", -- путь
"Internal Fuel Quantity Indication" -- имя свойства
).value
return gauge_readout or lb(10000)
end
GetProperty ожидает полный путь к компоненту в дереве компонентов (это все имена родительских компонентов), они должны начинаться с / чтобы указать абсолютный путь.
Возвращаемое значение - это объект-обёртка Property Доступ к базовому значению (в данном случае LReal с единицей измерения Pounds) предоставляется через
GetProperty(...).value.
Наблюдения и чувства
В дополнение к прямому доступу к свойствам Jester имеет систему наблюдения. Система позволяет сделать часто используемые данные легкодоступными, а также предоставлять более сложные данные, например, поступающие из DCS SDK.
Наблюдения являются частью чувств, которых у Jester несколько (глаза, уши, …). На данный момент большинство из них находятся в разработке.
local isAirborne = GetJester().awareness:GetObservation("airborne") or false
Взаимодействия
Одним из ключевых аспектов Jester является то, что он может взаимодействовать с кабиной, щёлкая переключатели, кнопки и вращая ручки.
Для этого API предлагает два подхода.
Взаимодействия с компонентами
Предпочтительный способ взаимодействия с кабиной - через систему компонентов.
Чтобы разрешить взаимодействие, необходимо зарегистрировать манипулятор в F_4E_WSO_Cockpit.lua:
-- ChaffMode: OFF, SGL, MULT, PROG
self:AddManipulator(
"Chaff Mode",
{component_path = "/WSO Cockpit/WSO Left Console/AN_ALE-40 CCU/Chaff Mode Knob"}
)
После этого с ним можно легко взаимодействовать, например:
task:AddAction(SwitchAction:new("Chaff Mode", "MULT"))
-- or in short
task:Click("Chaff Mode", "MULT")
или считывать его текущее значение:
local cockpit = GetJester():GetCockpit()
local chaff_mode = cockpit:GetManipulator("Chaff Mode"):GetState()
Необработанные взаимодействия
Если нужный переключатель ещё не поддерживает интерфейс компонентов, можно вместо этого использовать необработанный интерфейс, который вызывает команды DCS напрямую, как если бы игрок вручную нажал привязку.
-- отправляет значение 1 через команду WSO_EJECT_INSTANT на устройство EJECTION_SEAT_SYSTEM
ClickRaw(devices.EJECTION_SEAT_SYSTEM, device_commands.WSO_EJECT_INSTANT, 1)
-- отправляет значение, соответствующее положению 2 на 7-позиционной ручке
ClickRawKnob(devices.HUD_AN_ASG_26, device_commands.HUD_SelectHUDMode, 2, 7)
См. devices.lua для всех доступных устройств и аналогично command_defs.lua для команд.
Как правило, ручки и 2-позиционные переключатели используют диапазон [0, 1] Как правило, ручки и 2-позиционные переключатели используют диапазон [-1, +1]. Для 3-позиционных переключателей -1 обычно используется для перемещения 3-позиционного переключателя вниз, +1 - для перемещения его вверх, но некоторые переключатели имеют другую ориентацию. См. default.lua и clickabledata.lua чтобы узнать больше о конкретном переключателе и о том, как он реагирует на значения.
События
Помимо нажатия переключателей, Jester может реагировать на события, отправляемые как из C++, так и из Lua. Система следует простому шаблону наблюдатель/слушатель:
ListenTo("go_silent", function(task)
task:Click("Radar Power", "STBY")
end)
with:
if is_aar then
DispatchEvent("go_silent")
end
Task API
Ключевым аспектом написания логики для Jester является использование класса Task. Задачи состоят из последовательности действий. Задача может быть приостановлена, возобновлена или полностью отменена системой, если это необходимо.
Действия по своей природе выполняются асинхронно. Выполнение щелчка займёт некоторое время и не будет выполнено мгновенно. В частности, добавление действия щелчка к задаче не блокирует код, оно просто добавляется в цепочку действий, которые будут выполнены в конечном итоге.
Эта концепция аналогична Future-API в других языках, и Task предлагает fluent-API для удобной работы с ней.
Рассмотрим следующий пример:
local task = Task:new()
task:Roger()
:Click("Radar Power", "OPER")
:Wait(min(4))
:Click("Screen Mode", "radar")
:Say("phrases/radar_ready")
:Then(function()
self.scan_for_bandits = true
end)
Among other functions, the API offers:
AddAction- любоедействие, основа APIThen- анонимная функцияWait- времяWaitUntil- предикатSay- фразаRogerCantDoClick- имя, состояниеClickFast- имя, состояниеClickShort- имя, состояниеClickShortFast- имя, состояние
Подробнее см. Task.lua.
Интерфейс
Jester предоставляет два типа пользовательских интерфейсов. Колесо с выбираемыми опциями и диалоговое окно с вопросами и выбираемыми ответами, которые отображаются по требованию. Подробнее см. Wheel UI и Dialog UI.
Интерфейс колеса
Колесо Jester состоит из веб-интерфейса и предлагает API, доступный для Lua, для изменения его содержимого и реакции на действия.
Интерфейс
Интерфейс - это веб-сайт на основе Pixi JS, определённый в
f-4e\ModFolders\Mods\aircraft\F-4E\UI\JesterWheel
Открытие index.html в браузере показывает колесо, заполненное базовым содержимым.
Веб-сайт можно свободно редактировать, изменения видны после перезагрузки DCS (SHIFT+R).
Логика интерфейса, такая как анимация, определена в renderer.js, а взаимодействие обрабатывается в main.js.
interface.js объявляет основное содержимое колеса, а также все методы, относящиеся к связи C++ с JS.
Метод hb_send_proxy используется для отправки команд в C++, например, для уведомления о том, что действие было выбрано.
Lua
Колесо по сути представляет собой дерево меню. Каждое меню состоит из максимум 8 элементов. Элемент может быть конечным или содержать другое подменю. Кроме того, подменю также можно создать как внешнее меню, что увеличивает количество слотов для элементов до 18.
Каждый элемент может быть связан с действием, строкой, которая привязана к системе событий и, следовательно, на неё можно реагировать, если она вызвана.
Для взаимодействия с меню определено несколько методов, которые экспортируются в Lua:
Wheel.ReplaceMainMenu(main_menu)
Wheel.ReplaceSubMenu(sub_menu, menu_location)
Wheel.AddItem(item, menu_location)
Wheel.RemoveItem(item_name, menu_location)
Wheel.ReplaceItem(item, item_name, menu_location)
Wheel.RenameItem(new_item_name, current_item_name, menu_location)
Wheel.SetMenuInfo(info_text, menu_location)
Wheel.NavigateTo(menu_location)
Ниже показан простой пример добавления нового подменю в меню Navigation
(Навигация):
local waypoint_menu = Wheel.Item:new({
name = "Select Waypoint",
menu = Wheel.Menu:new({
name = "Select Waypoint",
items = {
Wheel.Item:new({ name = "TGT 1", action = "select_tgt_1" }),
Wheel.Item:new({ name = "TGT 2", action = "select_tgt_2" }),
Wheel.Item:new({ name = "Advanced", outer_menu = Wheel.Menu:new({
name = "More Waypoints",
items = {
Wheel.Item:new({ name = "RTB", action = "select_rtb" }),
Wheel.Item:new({ name = "Nearest Target", action = "select_tgt" }),
},
})}),
}
}),
})
Wheel.AddItem(waypoint_menu, {"Navigation"})
Информационный текст меню можно обновить с помощью
local current_waypoint = "WP 2"
Wheel.SetMenuInfo(current_waypoint, {"Navigation", "Select Waypoint"})
Чтобы отреагировать на выбранное действие, прослушайте соответствующее событие:
ListenTo("select_tgt_1", function(task)
-- Интерфейс компонентов
task:Click("Nav Panel Function", "TARGET_1")
-- или необработанный интерфейс
task:Then(function()
ClickRaw(
devices.NavigationComputer_AN_ASN_46A,
device_commands.RIO_NAV_COMP_FUNCTION_SELECTOR_KNOB,
3,
5
) -- Target 1
end)
end)
Интерфейс диалога
Диалог Jester состоит из веб-интерфейса и предлагает API, доступный для Lua, для изменения его содержимого и реакции на действия.
Интерфейс
Интерфейс - это веб-сайт на основе Pixi JS, определённый в
f-4e\ModFolders\Mods\aircraft\F-4E\UI\JesterDialog
Открытие index.html в браузере показывает диалог, заполненный примером содержимого.
Веб-сайт можно свободно редактировать, изменения видны после перезагрузки DCS (SHIFT+R).
Логика интерфейса, такая как анимация, определена в renderer.js, а взаимодействие обрабатывается в main.js.
interface.js объявляет основное содержимое диалога, а также все методы, относящиеся к связи C++ с JS.
Метод hb_send_proxy используется для отправки команд в C++, например, для уведомления о том, что действие было выбрано.
Lua
Диалоги отображаются по требованию и по порядку. Они отображаются в течение определённого времени, и пользователю предоставляется возможность участвовать в диалоге или игнорировать его, после чего он истечёт и исчезнет.
Диалог состоит из вопроса с максимум 4 выбираемыми вариантами. Вариант либо является окончательным, либо запускает следующий вопрос с новыми вариантами для выбора.
Диалоги хранятся и отображаются из очереди. Новый диалог можно поместить в очередь с помощью:
Dialog.Push(dialog)
Ниже показан простой пример добавления нового диалога:
local fuel_check_dialog = Dialog.Question:new({
name = "Jester",
content = "How is the fuel?",
phrase = "dialog/fuel_check",
label = "Fuel Check",
timing = Dialog.Timing:new({
question = s(5),
action = s(10),
}),
options = {
Dialog.Option:new({ response = "We are good", action = "fuel_good" }),
Dialog.Option:new({
response = "Fuel is low",
follow_up_question = Dialog.FollowUpQuestion:new({
name = "Jester",
content = "Okay, how do you want to proceed?",
phase = "dialog/fuel_low_proceed",
options = {
Dialog.Option:new({ response = "Remain on Mission" }),
Dialog.Option:new({ response = "RTB", action = "fuel_low_rtb" })
},
}),
})
},
})
Dialog.Push(fuel_check_dialog)
Чтобы отреагировать на выбранный вариант, прослушайте соответствующее событие:
ListenTo("fuel_low_rtb", function(task)
-- Component interface
task:Click("Nav Panel Function", "TARGET_1")
-- or Raw interface
task:Then(function()
ClickRaw(
devices.NavigationComputer_AN_ASN_46A,
device_commands.RIO_NAV_COMP_FUNCTION_SELECTOR_KNOB,
3,
5
) -- Target 1
end)
end)
Ливреи
"У нас есть они в двухцветном сером. У нас есть они в двухцветном зелёном. Мы можем достать их в ярко-розовом цвете фуксия."
Создание ливрей для нашего F-4E может быть утомительной работой.
Как правило, большая часть времени уходит на исследования в Интернете и в книгах, чтобы обеспечить максимально точные и реалистичные ливреи.
С выпуском F-4E Phantom II мы хотим увидеть, что у вас есть в запасе для F-4. Чтобы поддержать вас в ваших творческих способах воссоздания вашей любимой ливреи, есть несколько вещей, которые нужно узнать о самолёте и о том, как он представлен в DCS.
Набор текстур
Набор текстур был создан с учётом простоты использования. Он позволяет развернуть 3D-объект в 2D-пространство.
Чтобы обеспечить максимально возможное качество, набор текстур поставляется в линейном цветовом пространстве и 16-битной глубиной цвета. Имейте в виду, что не все графические редакторы будут обрабатывать это правильно. Набор текстур был создан с помощью Adobe Photoshop. Сохранение с 16-битной глубиной цвета займёт некоторое время, поэтому наберитесь терпения, нажимая Сохранить в вашем графическом приложении.
Набор также предоставляет стек слоёв Административные инструменты, который также содержит Развёртку каркаса, помогающую выровнять ваше изображение.
Папка с именем Partsfinder помогает идентифицировать части, которые принадлежат друг другу на UV-развёртке для определённых частей. Там нет отступов, поэтому, если вы используете их для выделения, вам может потребоваться расширить выделение на несколько пикселей, чтобы избавиться от артефактов на швах.
💡 Вы можете связывать файлы в Photoshop. Это означает, что вы можете создать изображение, сохранить его как файл, а затем связать его с вашим файлом набора текстур. Это обеспечивает неразрушающий рабочий процесс, который позволяет вам вносить изменения впоследствии, если вы не удовлетворены результатом.
PBR-рендеринг и файл RoughMet
Помимо вашего файла Albedo, который вы создаёте, экспортируя свою пользовательскую ливрею из набора текстур, вам понадобится файл RoughMet, чтобы максимально эффективно использовать свою пользовательскую ливрею.
Мы предоставляем вам несжатые файлы RoughMet в файлах набора текстур. DCS использует физически корректный рендеринг (PBR) для создания изображения, которое вы видите на своём мониторе или через гарнитуру VR.
Файлы RoughMet используют три канала RGB:
- Красный -> Ambient Occlusion (запечённые тени)
- Синий -> Metallic (определяет, является ли поверхность металлической или нет)
- Зелёный -> Roughness (является ли поверхность супергладкой или очень шероховатой)
Поскольку файл Roughmet находится в 8-битном диапазоне цветов RGB, на канал у вас есть 255 значений для определения указанных атрибутов. Визуально это представлено для каждого канала со значением 0 для чёрного и значением 255 для белого.

Избегайте ярких или тёмных цветов
Вместе с тем, что определено в RoughMet, движок DCS рендерит изображение. Вы должны избегать использования очень ярких или тёмных и 100% насыщенных цветов, так как в противном случае DCS не сможет создать правильные эффекты, когда поверхность освещается прямыми солнечными лучами.
Математически движок не может отобразить цвет, превышающий доступное цветовое пространство. Поэтому, если вы хотите яркую жёлтую маркировку на своём самолёте, уменьшите насыщенность примерно на 15%, а также яркость.
В конечном итоге вы можете проверить, находятся ли ваши текстуры в спектре PBR, загрузив свою пользовательскую ливрею в Modelviewer DCS и нажав F8, что покажет проблему в виде Material Errors. Если вы видите здесь оранжевый или пурпурный цвет, это означает, что рендерер не может нарисовать на нём все эффекты, так как базовый цвет (Albedo) слишком яркий или насыщенный.
💡 Существует множество отличных источников, чтобы узнать больше о физически корректном рендеринге, и вы всегда можете спросить нас напрямую в нашем Discord или на форуме.
Настройка персонажа
Фантом имеет настройку персонажа.
Пока эта функция и её интерфейс не будут полностью доступны на более позднем этапе раннего доступа, к некоторым её функциям уже можно получить доступ напрямую, изменив файл description.lua вашей ливреи.
Вот фрагмент области, на которую вам нужно обратить внимание:
custom_args =
{
[512] = 0.3, -- 0 - без зеркал, 0 - 0.4 - оба зеркала (уши Микки Мауса), 0.5+ - только верхнее зеркало.
[2008] = 0.95, -- Шлем WSO, 0.95 - HGU-55
[2006] = 0.95, -- Шлем пилота, 0.95 - HGU-55 (расширьте список аргументов отрисовки)
}
Найдите раздел custom_args, который обычно находится в нижней части файла. Числа внутри [] представляют собой аргумент отрисовки, используемый DCS, чтобы сообщить модели, что носит ваш пилот (а также сам самолёт).
Аргумент отрисовки [512] представляет собой зеркала на фонаре WSO. Его можно установить на значение от 0,0 до 1,0, что представляет собой диапазон анимации аргумента отрисовки.
Это значение используется, чтобы дать вашему пилоту определённый шлем, перчатки или что-то подобное. Или даже определить пол модели пилота.
[2006] - это аргумент отрисовки для шлема пилота. Установите его на 0.1, и ваш пилот будет носить шлем старой школы HGU-2. Установите его на 0.95, и он будет носить более современный HGU-55.
Применение пользовательских текстур Чтобы применить пользовательскую текстуру к самолёту, скопируйте существующую и замените файлы, сохранив имена. Вы можете найти небольшую библиотеку текстур, чтобы сократить общий размер ливреи, в папке commons по адресу \CoreMods\aircraft\F-4E\Liveries\F-4E-45MC\commons.
Попытка сохранить небольшую глубину папок может показаться немного запутанной, но на самом деле это упрощает применение текстуры в вашем description.lua и не раздувает его слишком сильно длинными путями к папкам.
Пример Папка ALQ131_g_ содержит ливрею для контейнера ALQ-131 в оливково-зелёных цветах. Вы можете указать своему description.lua использовать эту текстуру вместо белого цвета по умолчанию из DCS при установке ALQ-131 на Фантом в игре, поместив следующую строку кода в ваш файл description.lua как для текстуры Albedo, так и для текстуры Roughmet:
{ "ALQ_131", 0, "../commons/alq131_g/alq_131_diff", false };
{ "ALQ_131", ROUGHNESS_METALLIC, "../commons/alq131_g/alq_131_diff_roughmet", false };
Первое значение после { в скобках "" - это имя материала, в данном случае "ALQ_131". Найти эти имена материалов через DCS может быть немного сложно. Не стесняйтесь обращаться за помощью в наш Discord на канал #liveries-lair.
Используя тот же принцип, вы можете применить пользовательские текстуры лётного костюма к своему пилоту, а также текстуру HGU-2. Вот пример пилота F-4F немецких ВВС и WSO, оснащённых лётными костюмами немецких ВВС и серыми шлемами HGU-2:
{ "PILOT_HGU-2_Helmet", 0, "../commons/HGU2_g/HGU-2_Helmet", false };
{ "PILOT_HB_Char_RobinOlds_CWU", 0, "../commons/LGFS/hb_char_robinolds_cwu", false };
{ "PILOT_HB_Char_RobinOlds_overall", 0, "../commons/LGFS/hb_char_robinolds_overall", false };
{ "PILOT_HB_Char_RobinOlds_overall", NORMAL_MAP,
"../commons/LGFS/hb_char_robinolds_overall_nrm", false };
{ "PILOT_HB_Char_RobinOlds_roughmet", ROUGHNESS_METALLIC,
"../commons/LGFS/hb_char_robinolds_overall_roughmet", false };
{ "WSO_HGU-2_Helmet", 0, "../commons/HGU2_g/HGU-2_Helmet", false };
{ "WSO_HB_Char_RobinOlds_CWU", 0, "../commons/LGFS/hb_char_robinolds_cwu", false };
{ "WSO_HB_Char_RobinOlds_overall", 0, "../commons/LGFS/hb_char_robinolds_overall", false };
{ "WSO_HB_Char_RobinOlds_overall", NORMAL_MAP,
"../commons/LGFS/hb_char_robinolds_overall_nrm", false };
{ "WSO_HB_Char_RobinOlds_roughmet", ROUGHNESS_METALLIC,
"../commons/LGFS/hb_char_robinolds_overall_roughmet", false };
Интересные ссылки
 Пилоты самолётов F-4 Phantom II, 35-е тактическое истребительное крыло, слушают брифинг по планам полётов во время учений Team Spirit (Coronet Spray)
Пилоты самолётов F-4 Phantom II, 35-е тактическое истребительное крыло, слушают брифинг по планам полётов во время учений Team Spirit (Coronet Spray)
Видео с подробным описанием от Heatblur
Эпизод IV - РАДАР, часть 1 - Основы и теория
Исторические документальные и учебные фильмы
The Record-Breaking Phantom II
Прочее
Список сокращений
A
| Сокращение | Определение |
|---|---|
| AAR | Дозаправка топливом в воздухе |
| AC | Аэродинамический центр |
| ACM | Воздушный бой |
| AC | Переменный ток |
| ADCS | Комплект компьютера данных о воздухе |
| ADI | Авиагоризонт |
| AFC | Автоматическая регулировка частоты |
| AFCS | Система автоматического управления полётом |
| AGC | Автоматическая регулировка усиления |
| AHRS | Система ориентации и курса |
| AJB | Бортовой, электромеханический, бомбовый |
| AOA | Угол атаки |
| APA | Бортовой, радиолокационный, вспомогательный узел |
| APN | Бортовой, радиолокационный, навигационное средство |
| APQ | Бортовой, радиолокационный, специального назначения |
| APU | Вспомогательная силовая установка |
| AR | Дозаправка топливом в воздухе |
| ARI | Взаимосвязь элеронов и руля направления |
| ARC | Бортовой, радио, управление |
| ARR | Сброс дозаправки топливом в воздухе (кнопка) |
| ASA | Бортовой, специального типа, вспомогательный узел |
| ASE | Допустимая ошибка наведения |
| ASN | Бортовой, специального типа, навигационное средство |
| ASQ | Бортовой, специального типа, комбинированного назначения |
| AVTR | Бортовой видеомагнитофон |
| AWRU | Блок сброса оружия |
| AWW | Бортовой, вооружение, управление |
B
| Сокращение | Определение |
|---|---|
| BATH | Наилучший доступный истинный курс |
| BDHI | Индикатор пеленга, дальности и курса |
| BIT | Встроенное тестирование |
| BST | Линия визирования |
C
| Сокращение | Определение |
|---|---|
| CAA | Автоматический захват |
| CADC | Центральный компьютер данных о воздухе |
| CAP | Боевое воздушное патрулирование |
| CAS | Калиброванная воздушная скорость |
| CG | Центр тяжести |
| CIT | Температура на входе компрессора |
| CNI | Идентификация связи и навигации |
| CSD | Привод постоянной скорости |
D
| Сокращение | Определение |
|---|---|
| DC | Постоянный ток |
| DSCG | Цифровое устройство преобразования развёртки |
| DCU | Блок управления Douglas |
| DMAS | Цифровая модульная авионическая система |
| DME | Оборудование для измерения расстояния |
| DR | Счисление пути |
| DVST | Электронно-лучевая трубка с памятью |
E
| Сокращение | Определение |
|---|---|
| EAS | Эквивалентная воздушная скорость |
| ECM | Средства радиоэлектронного противодействия |
| EGT | Температура выхлопных газов |
F
| Сокращение | Определение |
|---|---|
| FL | Эшелон полёта |
G
| Сокращение | Определение |
|---|---|
| G | Перегрузка |
| GCA | Заход на посадку под управлением с земли |
| GCI | Наведение с земли |
| gpm | Галлонов в минуту |
H
| Сокращение | Определение |
|---|---|
| Hangfire | Задержка или отказ срабатывания боеприпаса после запуска |
| Hang Start | Запуск, который приводит к остановке оборотов и температуры |
| Hot Start | Запуск, при котором превышаются нормальные температуры запуска |
| HSI | Курсовая система |
| Hz | Герц |
I
| Сокращение | Определение |
|---|---|
| IP | Точка опознавания |
| IAS | Инструментальная скорость |
| IFF | Опознавание «свой-чужой» |
| IFR | Правила полётов по приборам |
| ILS | Система посадки по приборам |
| IMC | Метеорологические условия для полётов по приборам |
| IR | Инфракрасный |
| I/P | Идентификация положения |
J
| Сокращение | Определение |
|---|---|
| JP | Реактивное топливо |
K
| Сокращение | Определение |
|---|---|
| KTS | Узлы |
L
| Сокращение | Определение |
|---|---|
| LABS | Система бомбометания с малых высот |
| LCOSS | Оптический прицел с упреждающим вычислением |
| LE | Передняя кромка |
| LOX | Жидкий кислород |
| Lpm | Литров в минуту |
M
| Сокращение | Определение |
|---|---|
| MAC | Средняя аэродинамическая хорда |
| MIL | Военный |
| Misfire | Полный отказ срабатывания боеприпаса |
| MSDG | Группа многосенсорных дисплеев |
| MSL | Средний уровень моря |
N
| Сокращение | Определение |
|---|---|
| N/A | Неприменимо |
| N/E | Не установлено |
| NMPP | Морских миль на фунт |
O
| Сокращение | Определение |
|---|---|
| OAT | Температура наружного воздуха |
P
| Сокращение | Определение |
|---|---|
| P | Пилот |
| PC | Управление мощностью |
| PDVL | Линия выпуска давления |
| PLB | Аварийный радиобуй |
| PRF | Частота повторения импульсов |
| psi | Фунтов на квадратный дюйм |
Q
| Сокращение | Определение |
|---|---|
| q | Динамическое давление, фунтов на квадратный фут |
R
| Сокращение | Определение |
|---|---|
| RADAR | Радиообнаружение и определение дальности |
| RBL | Линия визирования радара |
| RF | Радиочастота |
| RIP | Точка радиолокационного опознавания |
| rpm | Оборотов в минуту |
| RWR | Приёмник радиолокационного предупреждения |
S
| Сокращение | Определение |
|---|---|
| SID | Стандартный маршрут вылета по приборам |
| SPC | Компенсатор статического давления |
T
| Сокращение | Определение |
|---|---|
| TACAN | Тактическая воздушная навигация |
| TAS | Истинная воздушная скорость |
| TE | Задняя кромка |
| TISEO | Электрооптическая система идентификации цели |
| TMN | Истинное число Маха |
U
| Сокращение | Определение |
|---|---|
| UHF | Ультравысокая частота |
V
| Сокращение | Определение |
|---|---|
| VFR | Визуальные правила полётов |
| VHF | Очень высокая частота |
| VIP | Точка визуального опознавания |
| VMC | Визуальные метеорологические условия |
| Vn | Соотношение скорости и ускорения |
| VORTAC | Всенаправленный радиомаяк сверхвысокой частоты и тактическая воздушная навигация |
W
| Сокращение | Определение |
|---|---|
| WSO | Офицер систем вооружения |
Выходные данные
Heatblur Simulations™
Ulica Wrzosowa 11, 72-602, Świnoujście, Польша
Контакт: support@heatblur.se
Команда Heatblur F-4E
Николас Даккард, креативный директор и ведущий художник
Кшиштоф Собчак, технический директор и ведущий программист
Александр Студен-Кирхнер, ведущий продюсер и ведущий сценарист
Даниэль Тишнер, старший программист (интерфейс, системы и ИИ)
Доминик Гловацкий, старший программист (системы, авионика, ИИ)
Шимон Скаржиньский, старший программист (системы, авионика, ИИ)
Эндрю О'Доннелл, старший программист (лётная динамика и двигатели)
Джошуа Нельсон, старший программист (оружие, радар и системы)
Терье Линдтвейт, программист (лётная динамика и двигатели)
Зандер Лабушагне, программист (системы и авионика)
Уилл Харрадайн, программист (системы и авионика)
Игорь Власный, программист (системы и авионика)
Яннис Леон Бёссманн, младший программист, редактор руководства
Никола Фаджиани, художник, 3D-модель
Дэви Бернардино, художник, 3D-модель и текстуры
Леон Фоти, художник, 3D-модель
Бен Мерляйн, ливреи и оформление
Кеннет Эллис, ведущий автор руководства
Андреас Сандин, ведущий дизайнер и веб-дизайнер
Адриан Капарцо, монтаж видео и трейлеры
Грейсон Фроберг, голос JESTER-AI
Джонатан Уильямс, голос НАЧАЛЬНИКА ЭКИПАЖА
Габриэль Штангель, учебные миссии и уроки
Дарья Курхузова, административный помощник
Команда энтузиастов переводчиков
Переводом занимались: HeDGeHoG, Diospa, Alex (GOD), Aero4000.
Увидимся в небе
