Инерциальная навигационная система AN/ASN-63
INS AN/ASN-63 предоставляет экипажу F-4E и интегрированной системе сброса оружия точную информацию о местоположении, скорости, ориентации и курсе в режиме реального времени. Когда система выровнена с максимальной точностью в режиме гироскопического компаса, INS имеет точность 3 морские мили в час кругового вероятного отклонения (CEP).
💡 Это означает, что после одного часа полёта вероятность ошибки точности распределена таким образом, что в 50% случаев она либо ниже, либо выше 3 морских миль.
Инерциальная измерительная платформа

Система использует четырёхкарданную (внешний крен, тангаж, внутренний крен, азимут) инерциальную навигационную платформу, причём двухкарданные подвесы крена обеспечивают резервирование, чтобы исключить блокировку кардана при выравнивании подвеса внешнего крена/азимута.
На платформе установлена пара двухкоординатных гироскопов G-200, причём ось верхнего гироскопа выровнена для вращения по оси север-юг, а нижний гироскоп выровнен для вращения по оси восток-запад; обнаружение момента в каждом гироскопе отслеживает перпендикулярные оси - таким образом, верхний гироскоп обнаруживает вращение восток/запад, а нижний гироскоп обнаруживает вращение север/юг. Таким образом, представлено вращение во всех трёх измерениях. Гироскопы плавающие, и правильная работа может начаться только после того, как жидкость достигнет рабочей температуры (160 градусов по Фаренгейту); система эффективно контролирует температуру во всём диапазоне рабочих высот Фантома. Ряд прецизионных магнитных датчиков момента обеспечивает движение локализации, в то время как датчики ускорения, работающие в отдельном электромагнитном поле, выполняют фактический сбор данных о смещениях гироскопов.
Вдоль платформы, установленные ортогонально (под углом 90 градусов друг к другу), находятся три акселерометра A-200D. Эти акселерометры, также плавающие, как и гироскопы, имеют аналогичное расположение датчиков момента и смещения для захвата скорости. Повышение точности этих оценок достигается за счёт включения камертона, резонанс которого эффективно устраняет всё статическое трение в узле захвата движения.
Навигационный компьютер и распределение выходных сигналов
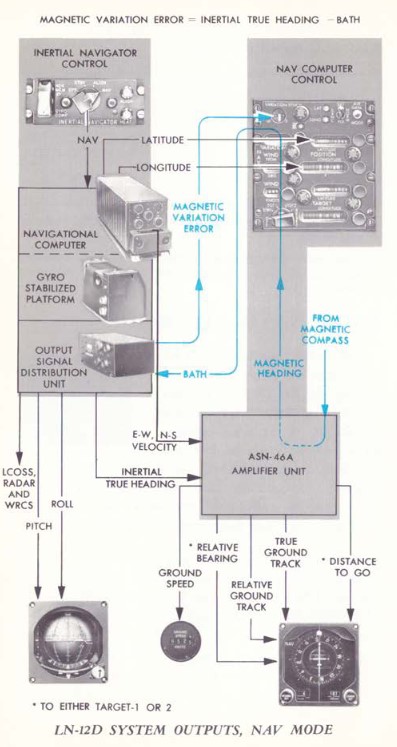
Соответствующие сигналы движения, захваченные с гироскопов и акселерометров, усиливаются в навигационном компьютере LN-12D, который затем выполняет интеграцию с привязкой к Земле. LN-12D компенсирует все долготы и может эффективно отслеживать широту до 80 градусов, где механические ограничения расчёта тангенса относительно экватора слишком высоки для устройства.
AN/ASN-63 предоставляет информацию другим системам Фантома от OSDU, или блока распределения выходных сигналов. OSDU предоставляет путевую скорость, скорость север-юг и восток-запад, общую скорость, инерциально стабилизированную высоту, угол набора высоты, истинный инерциальный курс, путевой угол и угол сноса. WRCS получает инерциальный истинный курс, путевой угол, угол коррекции сноса и угол сноса для своего баллистического компьютера. Угол сноса захватывается для BDHI, HSI и FDC. Угол коррекции сноса также предоставляется радару и LCOSS.
Варианты выравнивания
LN-12 имеет три режима выравнивания при запуске самолёта: выравнивание BATH, выравнивание по памяти курса (HDG MEM) и выравнивание по гироскопическому компасу. Перед выполнением любого выравнивания необходимо выбрать резервную систему отсчёта, панель управления навигационным компьютером следует повернуть в положение STBY, а её переключатель обновления положения следует установить в положение NORMAL. Локальное магнитное склонение следует ввести на счётчик склонения, а счётчик положения следует установить на местную широту и долготу. Это значительно ускорит выравнивание по гироскопическому компасу. Кроме того, выравнивание не следует выполнять со сложенными крыльями, так как магнитный индукционный датчик, который обеспечивает синхронизацию компаса, будет находиться на 60 градусов вне нормального положения.
INS также имеет опцию обновления положения в полёте, если экипаж заметит грубое отклонение от известных точек местоположения.
Индикация
На панели INS есть два индикатора: HEAT (
Индикатор HEAT активен в любом режиме выравнивания (включая грубое выравнивание в режиме STBY), указывая, что система нагревается. Он гаснет примерно через 110 секунд, указывая, что гироскопы достигли рабочей температуры 160 градусов по Фаренгейту.
Индикатор ALIGN, работающий исключительно в режиме ALIGN, сигнализирует о завершении выравнивания. Постоянно горящий индикатор ALIGN указывает на то, что достигнуто выравнивание BATH (быстрое). При условии, что система не столкнулась с какими-либо ошибками, а гироскопы были предварительно нагреты в режиме STBY (о чём свидетельствует погасший индикатор HEAT), система продолжит выполнять выравнивание по гироскопическому компасу. Мигающий индикатор ALIGN сигнализирует о завершении выравнивания по гироскопическому компасу или выравнивания по памяти курса.
Наилучший доступный истинный курс
Положение STBY необходимо кратковременно установить, чтобы избежать индикации NO-GO INS. После установки в положение ALIGN (индикатор HEAT можно игнорировать) индикатор ALIGN загорится постоянно примерно через 75 секунд, указывая на то, что выравнивание BATH готово. После выравнивания BATH INS имеет точность примерно 5,5 морских миль в час CEP, хотя могут наблюдаться и более высокие неточности. После достижения выравнивания BATH можно выбрать режим NAV и лететь на самолёте с учётом вышеуказанного предупреждения.
Выравнивание по памяти курса
Эта опция становится доступной, если выравнивание было ранее сохранено, а самолёт оставался неподвижным. Чтобы получить к ней доступ, выберите HDG MEM (
Чтобы получить доступ к ускоренному режиму выравнивания HDG MEM, необходимо поднять защиту и перевести переключатель вверх, а переключатель режима INS установить в положение ALIGN до тех пор, пока индикатор ALIGN не начнёт мигать. Затем INS можно перевести в режим NAV. Если позволяет время, перед переходом в ALIGN можно выбрать режим STBY, чтобы обеспечить правильный прогрев гироскопов (который проходит через цикл включения/выключения, как описано выше).
💡 Курс можно сохранить в редакторе миссий.
Выравнивание по гироскопическому компасу
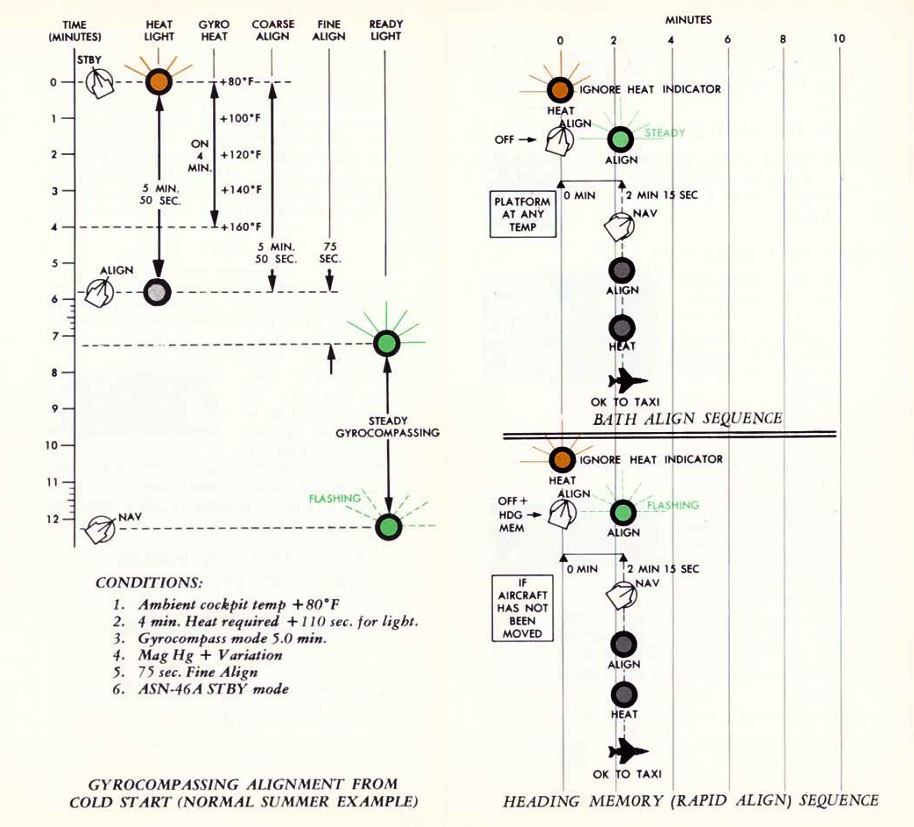
Максимальная точность системы достигается, если позволить INS выполнить полное выравнивание по гироскопическому компасу. Этот метод позволяет гироскопам найти максимально точную точку отсчёта истинного севера, но может потребовать значительного количества времени - и ещё большего времени, если до включения INS было введено неточное или отсутствующее значение магнитного склонения. Например, для ошибки курса компаса в один градус время достижения максимальной точности системы составляет примерно пять минут, что обеспечивает точность выравнивания ±10 угловых минут, давая вышеупомянутые 3 морские мили отклонения в час. Минимальное время для завершения выравнивания по гироскопическому компасу после достижения уровня выравнивания BATH или HDG MEM составляет 50 дополнительных секунд, в то время как нормальное выравнивание занимает около 5 минут. Если самолёт выровнен на широте 70 градусов или более, следует ожидать дополнительного времени.
Чтобы выполнить выравнивание по гироскопическому компасу, необходимо удерживать INS в режиме STBY, пока индикатор HEAT не погаснет. Переход в ALIGN, пока индикатор горит, не позволит выполнить полное выравнивание по гироскопическому компасу, в результате чего будет выполнен только процесс BATH. Продолжительность фазы нагрева зависит от температуры окружающей среды. Система нагревается со скоростью примерно 20°F в минуту, достигая рабочей температуры 160°F. Как только система достигнет своей рабочей температуры, потребуется ещё 50 секунд, пока индикатор HEAT не погаснет. После перехода в ALIGN индикатор загорится постоянно через 75 секунд, сигнализируя о завершении начального выравнивания BATH, запуская процесс выравнивания по гироскопическому компасу. После завершения выравнивания по гироскопическому компасу индикатор ALIGN будет мигать, указывая на то, что система достигла полного выравнивания. Во время выравнивания по гироскопическому компасу (когда индикатор выравнивания горит постоянно) в режим NAV можно войти в любое время, хотя оптимальная точность будет достигнута только тогда, когда индикатор ALIGN начнёт мигать.
Любое другое доступное время до перемещения самолёта можно провести в режиме ALIGN, чтобы ещё больше повысить точность системы.
Аварийное выравнивание в полёте
В случае значительной ошибки ориентации или отказа резервной системы отсчёта ориентации можно выполнить аварийное выравнивание INS в полёте. Об этом может свидетельствовать включение индикатора NAV SYS OUT. Самолёт должен поддерживать прямой и горизонтальный полёт, при этом переключатель выбора системы отсчёта установлен в положение STBY. После установки этой конфигурации ручку режима INS следует перевести в положение OFF, а затем в положение STBY на 15 секунд. Затем, по истечении 15-секундного интервала, верните режим в NAV и возобновите прямой и горизонтальный полёт. Процесс сброса селектора отсчёта в PRIM можно выполнить примерно через 40 секунд, хотя точное время выравнивания не указано.
💡 Точность ориентации при таком выравнивании зависит от того, насколько стабильно самолёт летел во время выравнивания, и могут потребоваться последующие выравнивания. После этого аварийного выравнивания будет доступна только информация об ориентации. Скорости, положение и показания навигационного компьютера будут неточными и не могут быть использованы для навигации, а индикатор NAV SYS OUT будет гореть.
Навигационный компьютер

Навигационный компьютер ASN-46A используется для общей навигации и тактического планирования маршрута. Система имеет возможности расчёта как по ортодромии, так и по локсодромии, причём первая используется для расчёта пеленга на большие расстояния (более 120 миль), а вторая - для точности на более близких расстояниях. Навигационный компьютер работает исключительно с использованием бортовых приборов, то есть INS, компьютера данных о воздухе и магнитного компаса; он не может получать информацию от систем ILS, VOR, или TACAN.
Система может поддерживать относительный пеленг и расстояние до двух определённых путевых точек одновременно (обозначенных как Target 1 и Target 2, причём Target 2 хранится в памяти), и эта информация отображается на BDHI и ADI в режиме реального времени. Чтобы данные отображались на BDHI, переключатель выбора навигации должен быть установлен в положение NAV COMP.
Компьютер также обеспечивает подтверждение текущей точности LN-12 с помощью пары индикаторов (
Навигационный компьютер может работать в режиме Inertial или Air Data. Оба режима обеспечивают одинаковые выходные данные, но режим Inertial (по умолчанию) более точный.
В случае отказа INS навигационный компьютер переходит в режим Air Data. В режиме Air Data задний пилот должен постоянно контролировать и корректировать истинное направление и скорость ветра, магнитное склонение, так как единственными доступными компьютеру входными данными для счисления пути являются истинная воздушная скорость (от компьютера данных о воздухе) и магнитный курс от системы компаса. Когда система переходит в режим Air Data, загорится индикатор AIR DATA MODE.
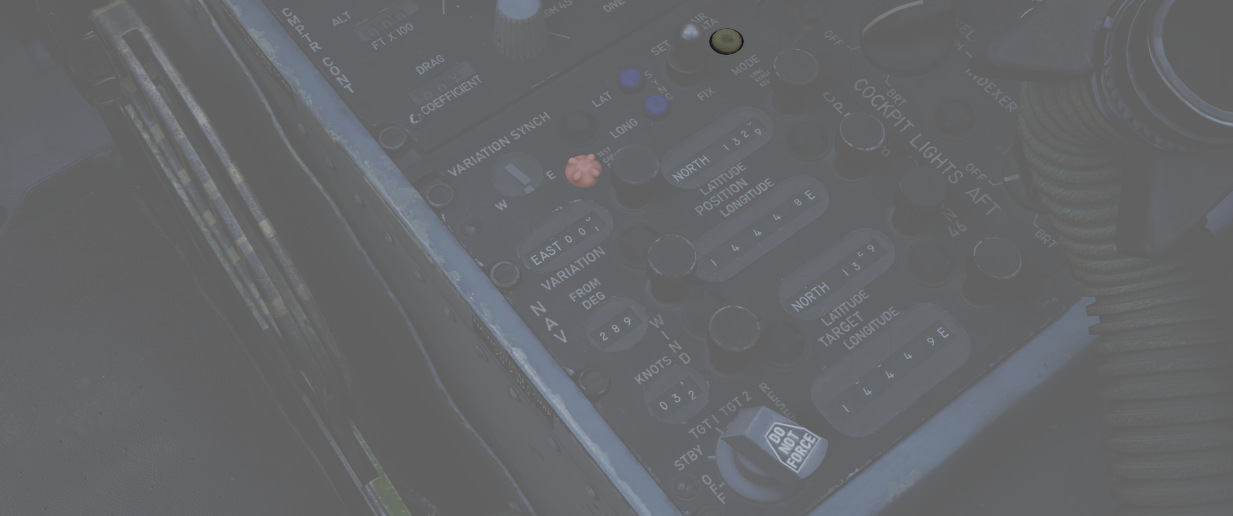
Во время запуска ручки управления положением, ручки управления ветром и ручка управления магнитным склонением используются для ввода известной широты, долготы, направления и скорости ветра, а также магнитного склонения для местоположения самолёта в этот момент.
Ввод путевых точек
Ввод путевых точек и информации о цели осуществляется с помощью ручки выбора функции и двух ручек управления целью (
| Название | Описание |
|---|---|
| OFF | Система выключена. |
| STBY | Система включена, но привязка к широте и долготе не выполняется относительно значений в окнах Target. |
| TARGET 1 | Обеспечивает показания дальности и пеленга на основе текущих введённых значений в окне Target. |
| TARGET 2 | Выбирает информацию о дальности и пеленге из ранее сохранённых значений в окне Target. |
| RESET | Удаляет все ранее сохранённые значения в окне Target, сохраняет текущие введённые значения в окне Target. |
Из-за функции памяти Target 2 на практике экипаж имеет некоторую гибкость в процессе, в зависимости от требований миссии. Например, если экипажу Фантома поставлена задача патрулирования или обороны относительно известной позиции (т.е. цели), координаты этого местоположения можно загрузить в значения Target Control, установить селектор функций в положение RESET, а затем вернуться в Target 2. Любое изменение с Target 2 на Target 1 или STBY, а затем обратно на Target 2 сохранит это значение местоположения, к которому можно легко получить доступ. Это запомнит введённое положение в Target 2, откуда к нему можно будет легко получить доступ, просто переключив ручку обратно в Target 2 в любое время.
Другой распространённый метод назывался «чехардой»:
-
При запуске вторая путевая точка сохранялась в памяти Target 2 (ввод значений в Target Control, функция RESET, затем обратно в Target 2).
-
При запуске вторая путевая точка сохранялась в памяти Target 2 (ввод значений в Target Control, функция RESET, затем обратно в Target 2).
-
Во время полёта к первой путевой точке, после её прохождения, Target 2 выбирался в качестве пункта назначения, а следующая путевая точка (
3 ) вводилась в значения Target Control. -
После пролёта путевой точки 2 ручка функции устанавливалась в положение RESET, а затем обратно в Target 2 - теперь извлекая значения путевой точки 3 из значений Target Control.
Этот процесс продолжался в течение всего полёта и позволял заднему пилоту немедленно переключиться на Target 1 для быстрой проверки относительного положения относительно другого интересующего местоположения, если это необходимо, или для изменения маршрута в полёте (например, к траектории заправщика), а затем вернуться к следующей сохранённой путевой точке для навигации.
Обновление в полёте
Обновление в полёте с помощью навигационного компьютера выполняется путём прямого пролёта над известными контрольными точками, используя визуальное или радиолокационное определение местоположения, над станцией TACAN или по указанию GCI.
Обновление в режиме Inertial
Когда навигационный компьютер находится в режиме Inertial, самолёт летит по прямой и на одном уровне в известном месте фиксации.

-
Перед прибытием в точку фиксации переключатель обновления положения устанавливается в положение SET. Это отключает счётчики долготы и широты.
-
Перед прибытием в точку фиксации переключатель обновления положения устанавливается в положение SET. Это отключает счётчики долготы и широты.
-
Непосредственно перед пролётом над точкой фиксации переключатель обновления положения устанавливается и удерживается в положении FIX.
-
При прямом пролёте над точкой фиксации переключатель обновления положения отпускается, позволяя ему вернуться в положение NORMAL.
Скорость коррекции навигационного компьютера составляет примерно 3 минуты широты или долготы в секунду, и переключатель обновления (
Обновление в режиме Air Data
В режиме Air Data навигационный компьютер можно обновить, как и в режиме Inertial, с помощью метода SET/FIX или путём прямого вращения ручек положения по широте и долготе. Использование последнего метода требует установки ручки выбора функции в положение STBY, TARGET 1 или TARGET 2. Предпочтительнее использовать метод SET/FIX, так как это позволяет мгновенно обновить данные при пролёте над точкой фиксации и отпускании переключателя.